научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 04, апрель 2013
DOI: 10.7463/0413.0548084
УДК 004.932
Россия, МГТУ им. Н.Э. Баумана
Введение
Разработка и внедрение в промышленность роботизированных комплексов является одним из важнейших направлений в задаче создания систем гибкого автоматизированного производства. Гибкость производства изделий обеспечивается роботизированным комплексом, в состав которого, кроме технологического оборудования и систем управления, входят системы технического зрения (СТЗ), предназначенные для получения информации об изделиях. Например, при выполнении технологических операций на конвейерах СТЗ позволяет осуществлять операции сортировки деталей, определять их положение и ориентацию [1]. При разработке алгоритмов обработки данных в СТЗ сортировка деталей формулируется как задача распознавания образов, регистрируемых аппаратными средствами СТЗ, а определение положения и ориентации – как задача оценки соответствующих параметров изображений этих деталей.
Целью исследований, изложенных в настоящей статье, является разработка алгоритма распознавания образов деталей, которые могут быть использованы в СТЗ роботизированных производственных комплексов. Задачи, решаемые при разработке такого алгоритма, конкретизируются следующими условиями. Во-первых, детали имеют относительно простую форму. Это означает, что контур регистрируемого изображения деталей однозначно характеризует их форму. Во-вторых, распознаванию подлежат детали, которые располагаются на ленте транспортёра открытого конвейера и имеют произвольные ориентации. Поэтому фон, на котором регистрируются изображения деталей, можно считать равномерным, а условия освещения таковы, что тени отсутствуют.
При такой постановке задачи можно использовать алгоритмы распознавания, основанные на анализе контуров регистрируемых изображений деталей. Этот подход позволяет исключить из анализа внутренние точки изображения и тем самым значительно сократить объем обрабатываемой информации за счет перехода от анализа функции двух переменных к функции одной переменной. Известные алгоритмы распознавания, основанные на анализе контуров образов объектов [8, 9, 11], включают следующую последовательность процедур:
а) предварительная обработка изображения;
б) выделение контуров;
в) формирование словаря признаков;
г) сопоставление образов с эталонами из базы данных на основе выбранного решающего правила.
Рассмотрим особенности этих процедур для решения поставленной задачи.
Предварительная обработка изображений
Предварительная обработка осуществляется с целью подавления помех, которые возникают в изображении на этапе их регистрации аппаратными средствами или при передаче сигналов по линиям связи. Задачей предварительной обработки является эффективное подавление шума при сохранении важных для последующего распознавания элементов изображения [2, 3]. Для описания шума систем регистрации изображений обычно используют модель белого шума, плотность вероятности которого описывается нормальным законом. Для оценки уровня помех в изображении используют показатель в виде пикового отношения сигнала к шуму, который определяется как ![]() , где
, где ![]() максимальная амплитуда уровня сигнала в изображении, а
максимальная амплитуда уровня сигнала в изображении, а ![]() среднеквадратическое отклонение (СКО) шума.
среднеквадратическое отклонение (СКО) шума.
На этапе предварительной обработки для подавления помех обычно используется фильтр Гаусса [6, 12], параметры которого выбираются на основе анализа пространственно-частотного спектра изображений объектов, подлежащих распознаванию.
Выделение контуров на изображениях
Выделение контуров является одним из методов сегментации изображений [4, 5, 6, 10, 12, 14]. В большинстве методов выделения контуров и основанных на этих методах алгоритмов используются линейные операторы с последующей пороговой обработкой. Некоторые их этих операторов осуществляют вычисление первой производной, как, например, операторы Робертса, Собеля [15, 16], или второй производной (оператор Лапласа [4, 10]). Но эти методы не удовлетворяют требованиям непрерывности и минимальной толщины контурных линий [13]. В обзоре, приведённом в [5], показано, что градиентные методы с простой пороговой обработкой уступают по качеству выделения контуров методу, предложенному Канни [6].
Детектор границ Канни включает следующую последовательность действий. После фильтрации помех на изображении гауссовым фильтром с заданным параметром сглаживания ![]() в каждой точке изображения вычисляется градиент, который характеризуется значением модуля
в каждой точке изображения вычисляется градиент, который характеризуется значением модуля
![]() , (1)
, (1)
и направлением
 (2)
(2)
В полученном массиве градиентов производится анализ и отслеживание областей с максимальными градиентами, которые образуют гребни. В процессе этого анализа точкам, не лежащим на гребнях, присваивается нулевое значение. Особенностью этой процедуры является то, что присвоение значения нуля выполняется только в том случае, если значение градиента в этой точке не превышает величины скачка интенсивности в двух соседних точках по одинаковому направлению градиента. В результате выполнения этой процедуры, которая называется немаксимальным подавлением, получается тонкая линия, лежащая на гребне перепадов интенсивности изображения.
Полученное изображение подвергается пороговой обработке с использованием двух порогов ![]() и
и ![]() , причем
, причем ![]() . Пиксели гребня, значение интенсивности в которых больше
. Пиксели гребня, значение интенсивности в которых больше ![]() , называются сильными, а пиксели, значения которых попадают в интервал
, называются сильными, а пиксели, значения которых попадают в интервал ![]() , называются слабыми. Алгоритм формирования контура завершается морфологической операцией, в процессе которой к сильным пикселям добавляются слабые, которые 8-связаны с сильными пикселями.
, называются слабыми. Алгоритм формирования контура завершается морфологической операцией, в процессе которой к сильным пикселям добавляются слабые, которые 8-связаны с сильными пикселями.
Как показано в [12], сглаживание значений интенсивности повышает помехоустойчивость детектора Канни, но снижает точность выделения контуров объектов изображения. Поэтому авторами работы [12] предложено для подчеркивания перепадов интенсивности изображения использовать вейвлет-преобразование, сохраняющее помехоустойчивость методов контурной сегментации изображений, подвергнутых сглаживанию, и в меньшей степени снижающее точность выделения контуров объектов. В качестве показателя помехоустойчивости предложенного метода использовался критерий Прэтта [10], а точность выделения контуров оценивалась показателем близости между границами тестового идеально сегментированного изображения и изображения, сегментированного предложенным методом обработки [17]. Авторами работы [12] показано, что положительный эффект от предложенного вейвлет-преобразования достигается только для частных случаев, когда отношение сигнала к шуму по мощности превышает значение, равное 5, а также при условии, когда ширина перепада границы превышает 3 пикселя. В остальных случаях метод Канни даёт лучшие результаты, по сравнению с предложенным авторами [12] методом контурной сегментации.
Предлагаемый в данной работе метод выделения контуров изображений объектов основан на последовательном применении детектора Канни, а также выполнении ряда морфологических операций обработки изображений, и назван нами комбинированным методом. Суть комбинированного метода иллюстрируется схемой, представленной на рисунке 1.
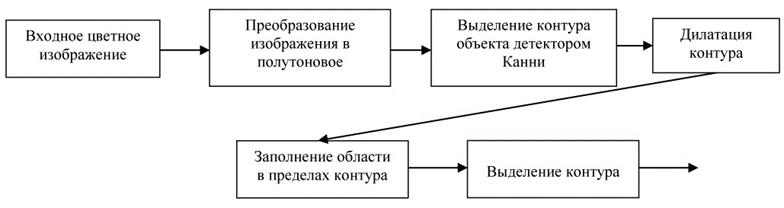
Рис 1. Схема алгоритма контурной сегментации комбинированным методом
Как следует из схемы, комбинированный метод включает процедуру преобразования исходного изображения, в общем случае цветного, в полутоновое изображение, процедуру выделения контура детектором Канни и дополнительные морфологические операции и процедуры, в том числе:
- операцию дилатации бинарного изображения контура, полученного методом Канни;
- процедуру заполнения области внутри контура;
- процедуру выделения контура.
Как известно [4], операция дилатации (наращивания) бинарного изображения, в данном случае границы ![]() , структурообразующим элементом (примитивом)
, структурообразующим элементом (примитивом) ![]() определяется соотношением
определяется соотношением
![]() (3)
(3)
В предлагаемом методе предлагается использовать структурообразующий элемент ![]() в виде примитива круглой формы диаметром 5 пикселей.
в виде примитива круглой формы диаметром 5 пикселей.
Процедура заполнения области основана на последовательном выполнении операций дилатации, дополнения и пересечения множеств.В начале процедуры одному из элементов внутри контура присваивается значение, равное 1, после чего производится заполнение всей области единицами в соответствии со следующей рекуррентной формулой [4]
![]() , (4)
, (4)
где: ![]() внутренние элементы в пределах контура, описываемые множеством
внутренние элементы в пределах контура, описываемые множеством ![]() ;
; ![]() симметричный примитив в виде креста размерностью
симметричный примитив в виде креста размерностью ![]() пикселя;
пикселя; ![]() множество, инверсное множеству
множество, инверсное множеству ![]() .
.
Последняя операция процедуры заполнения области – формирование множества ![]() , заключается в объединении множеств
, заключается в объединении множеств ![]() и
и ![]() , а именно,
, а именно, ![]() .
.
Процедура ![]() выделения контура множества
выделения контура множества ![]() , описывающего бинарное изображение, заключается в выполнении операции эрозии
, описывающего бинарное изображение, заключается в выполнении операции эрозии ![]() по примитиву
по примитиву ![]() , а затем получения разностного множества между С и результатом его эрозии [4], т.е.
, а затем получения разностного множества между С и результатом его эрозии [4], т.е.
![]() Ɵ
Ɵ![]() , (5)
, (5)
где ![]() примитив квадратной формы размерностью
примитив квадратной формы размерностью ![]() пикселя.
пикселя.
Формирование словаря признаков и выбор классификатора
В данной работе для формирования словаря признаков распознавания объектов по их контурным границам использованы фурье-дескрипторы [4, 7]. На основе фурье-дескрипторов можно сформировать признаки, которые инвариантны к сдвигу, повороту и изменению масштаба границы объекта.
Для вычисления фурье-дескрипторов контур границы объекта представляется в виде массива комплексных чисел ![]() ,
, ![]() . Выражение дискретного преобразования Фурье для массива
. Выражение дискретного преобразования Фурье для массива ![]() задается выражением [4, 7]
задается выражением [4, 7]
 , (6)
, (6)
где ![]() .
.
Комплексные коэффициенты ![]() , определяемые выражением (6), называются фурье-дескрипторами границы. При формировании вектора признаков используют модули фурье-дескрипторов с положительными и отрицательными индексами
, определяемые выражением (6), называются фурье-дескрипторами границы. При формировании вектора признаков используют модули фурье-дескрипторов с положительными и отрицательными индексами ![]() , причём
, причём ![]() . Для обеспечения инвариантности признаков к сдвигу, повороту и изменению масштаба выполняют нормировку дескрипторов на модуль дескриптора с индексом
. Для обеспечения инвариантности признаков к сдвигу, повороту и изменению масштаба выполняют нормировку дескрипторов на модуль дескриптора с индексом ![]() . Вектор признаков
. Вектор признаков ![]() представляется в виде
представляется в виде
 . (7)
. (7)
Значение параметра ![]() определяет размерность признакового пространства, которая равна
определяет размерность признакового пространства, которая равна ![]() .
.
Для распознавания образов объектов был выбран простейший классификатор, основанный на минимизации евклидова расстояния между вектором ![]() признаков распознаваемого объекта
признаков распознаваемого объекта ![]() и векторами
и векторами ![]() (
(![]() ) признаков эталонных объектов, образующих алфавит классов [4]. В данном случае количество классов равно
) признаков эталонных объектов, образующих алфавит классов [4]. В данном случае количество классов равно ![]() . Евклидово расстояние определяется формулой
. Евклидово расстояние определяется формулой
 . (8)
. (8)
Решение о принадлежности объекта ![]() к некоторому классу
к некоторому классу ![]() – решающее правило, можно представить соотношением
– решающее правило, можно представить соотношением
![]() . (9)
. (9)
Численные эксперименты
Целью экспериментов являлась сравнительная оценка эффективности алгоритма распознавания образов на основе фурье-дескрипторов контуров объектов, которые получены методом Канни и предложенным комбинированным методом. Для этого в среде MATLABбыла разработана программа, в которой реализованы описанные выше алгоритмы выделения контуров и распознавания образов объектов.
Для проведения экспериментов была подготовлена база данных для 40 классов относительно простых объектов, которые регистрировались цифровой камерой. Каждый класс в базе данных включал одно эталонное изображение размером 640х480 пикселей при 256 уровнях квантования. Изображения объектов представлены на равномерном фоне, уровень которого в относительных величинах составлял значение, примерно равное 0,5. Эталонные изображения содержали помеху, обусловленную шумом устройства регистрации со среднеквадратическим отклонением (СКО), которое в относительных единицах оценивалось значением ![]() . Изображения эталонов, образующие базу данных, представлены на рисунке 2.
. Изображения эталонов, образующие базу данных, представлены на рисунке 2.

Рис. 2. База данных объектов
Тестовая выборка изображений была подготовлена из эталонных изображений и включала 480 изображений, в том числе: 40 эталонных изображений; 160 изображений, полученных поворотом эталонных изображений на углы 20º, 30º, 60º и 80º; 80 изображений, полученных масштабированием эталонных изображений с коэффициентом масштабирования 0,75 и 0,5; 200 изображений, полученных добавлением к эталонным изображениям аддитивного шума с нормальным законом распределения и СКО, равным 0,036, 0,062, 0,073, 0,086 и 0,101. При проведении экспериментов для распознавания использовалось 98 признаков.
На рисунке 3 приведена иллюстрация выделения контуров объектов по методу Канни и комбинированным методом. В детекторе Канни параметр фильтрации изображения имел значение ![]() , значение нижнего порога равнялось
, значение нижнего порога равнялось ![]() , а верхнего –
, а верхнего – ![]() . Из рисунка 3 следует, что визуальное восприятие контуров, полученных комбинированным методом, выше, чем контуров выделенных методом Канни.
. Из рисунка 3 следует, что визуальное восприятие контуров, полученных комбинированным методом, выше, чем контуров выделенных методом Канни.

Рис. 3. Результат выделения контуров объектов
а) исходные изображения объектов; б) границы, полученные методом Канни;
в) границы, полученные комбинированным методом.
В основной части экспериментов оценивалась эффективность процесса распознавания образов для всех тестовых выборок изображений. Вероятность распознавания изображений оценивалась частотой принятия правильных решений о принадлежности тестовых изображений к определённому классу. Оценка вероятности распознавания, выраженная в процентах, определялась по формуле
 , (10)
, (10)
где ![]() количество положительных исходов при предъявлении тестовых изображений в испытании, а
количество положительных исходов при предъявлении тестовых изображений в испытании, а ![]() количество предъявлений тестовых изображений в испытании.
количество предъявлений тестовых изображений в испытании.
В таблице 1, в качестве примера, приведены значения евклидова расстояния, вычисленные для тестовой выборки изображений с вариациями углов поворота. В диагональных ячейках этой таблицы содержатся значения евклидова расстояния, вычисленного при сопоставлении повернутых изображений объектов с эталонными изображениями того же объекта.
В таблицах 2 и 3 представлены значения вероятности распознавания при предъявлении тестовых изображений, у которых контуры выделялись методом Канни, а также комбинированным методом. В частности, в таблице 2 приведены результаты экспериментов, в которых как тестовые использовались изображения, полученные из эталонных изображений путём изменения масштаба и поворота.
В таблице 3 приведены результаты экспериментов, с тестовыми изображениями, полученными добавлением аддитивного шума с различными значениями СКО.
Таблица 1. Значения евклидова расстояния при сопоставлении эталонных и повёрнутых изображений
модель Тест- -объект |
|
|
|
|
|
|
|
|
|
| 0.0036 | 0.1007 | 0.0916 | 0.0979 | 0.0861 | 0.1292 | 0.1088 | 0.0763 | 0.0843 |
| 0.1107 | 0.0083 | 0.0265 | 0.0792 | 0.0270 | 0.0219 | 0.0197 | 0.1176 | 0.1371 |
| 0.1010 | 0.0179 | 0.0012 | 0.0312 | 0.0160 | 0.0211 | 0.0047 | 0.0547 | 0.0873 |
| 0.1048 | 0.0732 | 0.0304 | 0.0007 | 0.0343 | 0.0850 | 0.0441 | 0.0166 | 0.0295 |
| 0.1010 | 0.0322 | 0.0188 | 0.0286 | 0.0019 | 0.0310 | 0.0171 | 0.0615 | 0.0807 |
| 0.1731 | 0.0236 | 0.0291 | 0.0844 | 0.0256 | 0.0073 | 0.0127 | 0.1388 | 0.1795 |
| 0.1214 | 0.0154 | 0.0059 | 0.0423 | 0.0149 | 0.0110 | 0.0007 | 0.0754 | 0.1103 |
| 0.0773 | 0.1161 | 0.0630 | 0.0211 | 0.0713 | 0.1340 | 0.0884 | 0.0026 | 0.0129 |
| 0.0910 | 0.1356 | 0.0864 | 0.0339 | 0.0913 | 0.1685 | 0.1185 | 0.0177 | 0.0027 |

Таблица 2. Влияние масштаба и поворота изображения на вероятность распознавания
Вид тестовой выборки | Вероятность распознавания при выделении контуров методом Канни, % | Вероятность распознавания при выделении контуров комбинированным методом, % |
Эталонные изображения | 100% | 100 % |
Коэффициент масштаба изображений 0,75 | 82,5% | 95 % |
Коэффициент масштаба изображений 0,5 | 50% | 70 % |
Поворот изображений на угол 20º | 90% | 90% |
Поворот изображений на угол 30º | 90% | 90% |
Поворот изображений на угол 60º | 90% | 90% |
Поворот изображений на угол 80º | 90% | 90% |
Таблица 3. Влияние значения СКО аддитивного шума на вероятность распознавания
СКО шума | Вероятность распознавания при выделении контуров методом Канни, % | Вероятность распознавания при выделении контуров комбинированным методом, % |
0,036 | 85% | 90 % |
0,062 | 52,5% | 87.5 % |
0,073 | 35% | 85 % |
0,086 | 32,5% | 80 % |
0,101 | 25% | 67,5 % |
Из результатов, представленных в таблице 2, следует, что алгоритм распознавания, в котором для выделения границ используется комбинированный метод, является более устойчивым к изменению масштаба изображения. Поворот изображения в одинаковой степени снижает вероятность распознавания, как при выделении границ по методу Канни, так и для комбинированного метода. Как показал анализ, снижение вероятности распознавания при повороте изображения обусловлено искажениями, которые вносит в описание контуров алгоритм поворота изображения.
Из таблицы 3 следует, что увеличение СКО шума в изображении снижает вероятность распознавания для обоих алгоритмом. Но алгоритм распознавания, в котором для выделения границ используется комбинированный метод, является более устойчивым к аддитивному шуму.
Заключение
На основании проведённых исследований можно сделать следующие выводы:
· предложенный комбинированный метод выделения контуров по сравнению с методом Канни обеспечивает более высокую эффективность распознавания образов простых объектов в алгоритмах на основе фурье-дескрипторов;
· предложенный алгоритм распознавания может быть использован в СТЗ роботизированных комплексов при сортировке деталей на открытых конвейерах.
Списокrлитературы
1. Генкин В.Л., Ерош И.Л., Москалев Э.С. Системы распознавания автоматизированных производств. М.: Машиностроение, 1988. 242 с.
2. Яне Б. Цифровая обработка изображений : пер. с англ. М.: Техносфера, 2007. 584 с.
3. Грузман И.С., Киричук В.С., Косых В.П., Перетягин Г.И., Спектор А.А. Цифровая обработка изображений в информационных системах: учеб. пособие. Новосибирск: Изд-во НГТУ, 2003. 352 с.
4. Гонзалес Р., Вудс Р. Цифровая обработка изображений : пер. с англ. М.: Техносфера, 2005. 1072 с.
5. Стругайло В.В. Обзор методов фильтрации и сегментации цифровых изображений // Наука и образование. МГТУ им. Н.Э. Баумана. Электрон. журн. 2012. № 5. DOI: 10.7463/0512.0411847
6. Canny J. A Computational Approach for Edge Detection // IEEE Trans. Pattern Anal. Machine Intel. 1986. Vol. 8, no. 6. P. 679-698.
7. Гонсалес Р., Вудс Р., Эддинс С. Цифровая обработка изображений в среде MATLAB : пер. с англ. М.: Техносфера, 2006. 616 с.
8. Granlund, G.H. Fourier Pre-processing for Hand Print Character Recognition // IEEE Transactions on Computers. 1972. Vol. C-21. P. 195-201.
9. Kauppinen H., Seppänen T., Pietikäinen M. An Experimental Comparison of Autoregressive and Fourier-Based Descriptors in 2D Shape Classification // IEEE Transactions on Pattern Analysis and Machine Intelligence. Feb. 1995. Vol. 17, no. 2. P. 201-207.
10. Прэтт У. Цифровая обработка изображений. В 2 кн. : пер. с англ. М.: Мир, 1982. 792 с.
11. Протасов В.И. Распознавание трёхмерных объектов на сложном фоне по части контура. Режим доступа: http://www.sciteclibrary.ru/rus/catalog/pages/4595.html (дата обращения 01.02.2013).
12. Полякова М.В., Крылов В.Н. Морфологический метод контурной сегментации на основе репагулярного вейвлет-преобразования // Труды Одесского политехнического университета. 2006. Вып. 1 (25). С. 98-103.
13. Чочиа П.А. Пирамидальный алгоритм сегментации изображений // Информационные процессы. 2010. Том 10, № 1. С. 23-35. Режим доступа: http://www.jip.ru/2010/23-35-2010.pdf (дата обращения 01.02.2013).
14. Clark J.J. Authenticating Edges Produced by Zero-Crossing Algorithms // IEEE Trans. PatternAnalysisMachineIntelligence. 1989. Vol. 12, no. 8. P. 830-831.
15. Робертс Л. Автоматическое восприятие трехмерных объектов // Интегральные роботы : сб. Вып. 1 / под ред. Г.Е. Поздняка. М.: Мир, 1973. С. 162-208.
16. Sobel I.E. Camera Models and Machine Perception. Ph.D. Thesis. Palo Alto, Calif., Stanford University, 1970.
17. Абакумов В.Г., Крылов В.Н., Антощук С.Г. Повышение эффективности обработки образной информации в автоматизированных системах // Электроника и связь. 2005. Темат. вып. “Проблемы электроники”, ч. 1. С. 100-105.
Публикации с ключевыми словами: распознавание образов, системы технического зрения, контурная сегментация
Публикации со словами: распознавание образов, системы технического зрения, контурная сегментация
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||