научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 10, октябрь 2011
УДК. 62-552
МГТУ им. Н.Э. Баумана
Введение
Важной задачей, решаемой при создании различных видов двигателей, является обеспечение требуемой равномерности движения выходного вала. Неравномерность движения связана c изменением в процессе работы движущих сил и сил сопротивления. Эти изменения вызваны как периодическим характером рабочего процесса, так и внешними изменениями. Например, в двигателе внутреннего сгорания на ходе расширения сила разгоняет машину, а на ходах выпуска, всасывания и сжатия тормозит ее. Эти процессы вызывают неравномерность вращения, которая изменяется с периодичностью рабочего цикла. Для борьбы с этой неравномерностью обычно используется маховик.
Для контроля скорости выходного вала на длительных промежутках времени необходимы системы автоматического управления. В случае паровых машин речь идет о центробежных регуляторах. Задачей регулятора является поддержание, в узких пределах вокруг заданного значения, средней угловой скорости паровой машины при изменении нагрузки, например при включении, и выключении обслуживаемых насосов, станков, а также при изменении давления в паровом котле. Регулятор автоматически действует на приток пара, изменяя его в таком направлении, чтобы восстановить равновесие между действующим и нагрузочным моментами [1].
До середины XIX века в промышленности успешно применялись регуляторы, построенные по принципу регулятора Уатта. Однако впоследствии все чаще возникали трудности при наладке регуляторов, случаи неустойчивой работы и генерации колебаний. Почему это происходило? Сегодня, после изучения работ Максвелла и Вышнеградского [2] по теории управления, несложно ответить на этот вопрос.
Первые паровые машины - это машины низкого давления, маломощные с небольшой частотой вращения вала. У них были громадные маховики и легкие механизмы регуляторов (Рис. 1). Так как качество подвижных соединений было невысоким, то звенья регулятора перемещались с существенным трением. Также не было высоких требований к равномерности вращения. Позже будет показано, что все это в совокупности обеспечивало устойчивую работу машины с регулятором.
В конце XIXвека были созданы мощные и быстроходные паровые машины. Увеличение частоты вращения вала позволило значительно уменьшить размеры маховика. Повысились требования к точности регулирования, что сделало необходимым уменьшения коэффициента нечувствительности и коэффициента неравномерности. Увеличение мощности паровых машин потребовало увеличения необходимого усилия для перемещения элементов регулятора, что в свою очередь привело к увеличению массы грузов.
Для повышения чувствительности регулятора предпринимались специальные меры к уменьшению трения – повышалась точность изготовления деталей регулятора, улучшалось качество смазки подвижных соединений. Также было много попыток уменьшить коэффициент неравномерности, модифицируя конструкцию регулятора Уатта.
|
|


Рис. 1. Паровые машины XVIII-XIX веков.
Инженеры считали, что эти меры улучшат регулирование, однако происходило обратное – регуляторы теряли устойчивость. Работа Максвелла [2], в которой он призывал делать регуляторы астатическими (то есть, с нулевым коэффициентом неравномерности) еще более усугубила проблему. На многие вопросы был дан ответ в статьях Вышнеградского [2], который доказал, что астатический регулятор не работоспособен, а статический регулятор нужно оснащать демпфером.
1. Основные параметры и классификация регуляторов.
Статические регуляторы
В коллекции механизмов МГТУ имеется восемь моделей центробежных регуляторов различных авторов и изготовителей. Они наглядно иллюстрируют различные этапы развития теории центробежных регуляторов. Приведем принятую классификацию, согласно которойразличают три типа регуляторов: статические, астатические и псевдоастатические [3, 4].

Рис. 2. а – центробежный регулятор Уатта; б – модифицированный регулятор Уатта.
Известно, что статические системы регулирования характеризуются наличием постоянной ошибки. Статические регуляторы, к которым относится регулятор Уатта, обладают широким диапазоном равновесных скоростей. Этот диапазон определяет ошибку регулирования и чем он меньше тем точнее работает регулятор. Каждому значению скорости вращения вала соответствует определенное положение муфты, а следовательно и определённое положение заслонки управляющей доступом пара. То есть паровая машина снабженная регулятором Уатта не может работать на любых оборотах при заданной нагрузке, а каждой нагрузке соответствует определенное число оборотов.
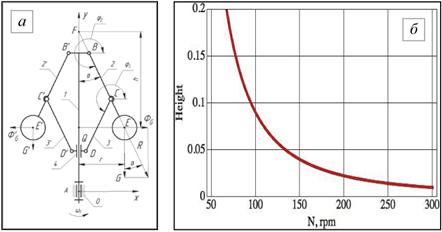
Рис. 3. а – схема модифицированного регулятора Уатта; б – его рабочая характеристика.
На рис. 2а изображена схема оригинальной конструкции регулятора Уатта. Однако на практике чаще использовался модифицированный более компактный механизм (Рис. 2б). Рассмотрим подробнее конструкцию модифицированного регулятора. На рис. 3а: 1 – вал регулятора, 2 и 2’- рычаги с грузами, 3 и 3’ – рычаги привода муфты и 4 – муфта. Вал регулятора 1 соединен с главным валом машины и вращается с частотой ω1. При постоянной частоте ω1 грузы регулятора находятся в равновесии под действием сил инерции ФG и сил тяжести G. С увеличением частоты равновесие нарушается, так как сила инерции ФG изменяется, а вес остается неизменным. Грузы и муфта переходят в новое положение, регулируя тем самым количество поступающего пара.
Механизм регулятора симметричный, поэтому достаточно рассмотреть равновесие только одного рычага под действием силы инерции и силы тяжести. Трением в шарнирах, весом звеньев и муфты пренебрегаем [3, 5]. Груз будет находиться в равновесии, если проекции сил ФGи Gна направление будут равны:
![]() . (1)
. (1)
Отсюда получаем
![]() . (2)
. (2)
Здесь m– масса груза, r– расстояние от центра масс груза до оси вращения, h=lEF·cosα – поднормаль, то есть проекция нормали к траектории точки Bна ось y(Рис. 4). В уравнении (2) lEF и g – константы; каждому значению угловой скорости ω соответствует свое значение угла α и поднормали, увеличение ωувеличивает угол α и уменьшает величину поднормали. Используя известное соотношение между угловой скоростью и частотой вращения
![]() , (3)
, (3)
где ![]() - число оборотов в минуту, получим соотношение между перемещением муфты
- число оборотов в минуту, получим соотношение между перемещением муфты ![]() и числом оборотов вала регулятора
и числом оборотов вала регулятора ![]() (Рис. 3б).
(Рис. 3б).
Как видно из графика на рис. 3б, регулятор нельзя применять для мощных паровых машин. Кривая зависимости положения муфты от частоты вращения вала имеет почти горизонтальный вид при частоте более 250 оборотов в минуту, то есть перемещения муфты, а, следовательно, и регулирования количества пара почти не происходит. В тоже время скорость продолжает расти, что может привести к авариям. Несмотря на эти недостатки, регулятор получил широкое распространение и успешно работал в паровых машинах малых мощностей.
Чтобы разобраться в общих проблемах регуляторов, а также в специфике различных механизмов воспользуемся понятиями неравномерности и нечувствительности регулятора.
Предположим, что вал машины вращается с некоторой постоянной скоростью ω0, при которой регулятор находится в равновесии. Пусть скорость машины возросла. При переходе регулятора в новое положение должны быть преодолены силы сопротивления в шарнирах и силы трения. Муфта начнет подниматься только тогда когда центробежная сила дойдет до величины, при которой она может уравновесить вес шаров, муфты и сил сопротивления. Предположим, что это начнет происходить при скорости ω1>ω0. Точно также муфта начнет опускаться лишь тогда, когда скорость вращения уменьшится до некоторой величины ω2<ω0. При изменении скорости от ω2 до ω1 регулятор сохраняет постоянную конфигурацию рычагов соответствующую скорости ω0. Следовательно, в пределах между этими двумя значениями регулятор остается нечувствительным. Для количественной оценки нечувствительности регулятора используется коэффициент нечувствительности
![]() . (4)
. (4)
Оптимальным для коэффициента нечувствительности ![]() является значение в диапазоне 0,03 – 0,05 [3, 4].
является значение в диапазоне 0,03 – 0,05 [3, 4].
Регулятор проектируется для поддержания средней скорости вала машины в определенном диапазоне ее изменения. Верхнее положение муфты регулятора соответствует максимальной скорости ωT, нижнее положение – минимальной ωB. Регулятор будет находиться в положении равновесия при всех значениях скорости от ωB до ωT. Но равновесная скорость будет отличной от регулируемого значения ω0. Разница между новой равновесной скоростью и ω0 определяет ошибку регулирования. Коэффициентом неравномерности регулятора называют отношение максимального изменения скорости к ее среднему значению
![]() . (5)
. (5)
Для астатического регулятора ωB = ωT, то есть коэффициент ![]() равен нулю. Соответственно, чем меньше у регулятора величина Δ, тем регулятор ближе к астатичности. Хорошим значением коэффициента
равен нулю. Соответственно, чем меньше у регулятора величина Δ, тем регулятор ближе к астатичности. Хорошим значением коэффициента ![]() считается 0,06, когда колебания скорости составляют шесть процентов [3, 4].
считается 0,06, когда колебания скорости составляют шесть процентов [3, 4].
Астатические регуляторы также называются изохронными, так как время одного оборота регулятора вокруг своей оси в состоянии равновесия будет одинаковым при любом положении грузов [1].
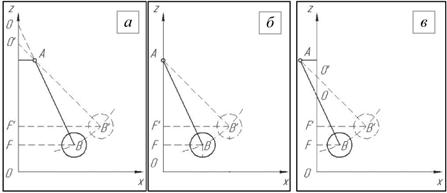
Рис. 4. Схемы крепления рычагов.
Первые проблемы возникли при увеличении мощности паровых машин. Для работы с высокоскоростными машинами к классическому регулятору Уатта была добавлена тяжелая муфта. Регулятор такой конструкции был запатентован в 1858 году американским инженером Чарльзом Портером (Рис. 5). Как видно нарис. 5a грузы находятся на пересечении верхних и нижних рычагов [3, 6, 7].

Рис. 5. а – центробежный регулятор Портера; б – его схема.
В своем механизме Портер существенно уменьшил размер грузов, что позволило повысить чувствительность регулятора. Тяжелая муфта находилась на оси вращения регулятора, и ее момент инерции не влиял на чувствительность. Массой муфты регулировалось значение равновесной скорости. Определим равновесную скорость вращения регулятора [3]. Рассмотрим уравнение моментов вокруг точки I(Рис. 5б)
![]() . (6)
. (6)
Здесь m – масса одного шара, M – масса муфты, ![]() – сила инерции, действующая на груз. Выразим длины плеч через тангенс
– сила инерции, действующая на груз. Выразим длины плеч через тангенс
![]() . (7)
. (7)
Отсюда получаем
![]() , (8)
, (8)
где
![]() . (9)
. (9)
2. Астатические регуляторы
Как было сказано выше, к середине XIXвека статические регуляторы, построенные по уаттовскому типу, перестали справляться со своей задачей. Необходимость более точного регулирования, возникшая с появлением мощных паровых машин, заставляла инженеров изобретать новые методы для снижения нечувствительности и неравномерности.
До появления первых работ по теории управления считалось, что высокая неравномерность и низкая чувствительность это основные проблемы регуляторов, с которыми необходимо бороться. У регуляторов уаттовского типа был значительный коэффициент неравномерности. Пока обращалось внимание лишь на статику регулятора, было заманчивым уменьшить коэффициент неравномерности для повышения точности регулятора. Руководимые такой идеей инженеры предлагали новые конструкции регуляторов, имеющие меньшую неравномерность.
Существенное влияние на неравномерность оказывает способ крепления верхних рычагов. Действительно, уравнение (2) определяет равновесную скорость классического регулятора Уатта, где ![]() - поднормаль (расстояние на вертикальной оси между проекцией на ось центра масс груза и точкой пересечения рычага с осью регулятора – отрезок OF на рис. 4). Чем существеннее изменение
- поднормаль (расстояние на вертикальной оси между проекцией на ось центра масс груза и точкой пересечения рычага с осью регулятора – отрезок OF на рис. 4). Чем существеннее изменение ![]() при перемещении грузов, тем больше колебания скорости. Следовательно, способ подвеса грузов, изображенный на рис. 4в позволяет существенно снизить неравномерность скорости. Но этого недостаточно чтобы получить астатический регулятор.
при перемещении грузов, тем больше колебания скорости. Следовательно, способ подвеса грузов, изображенный на рис. 4в позволяет существенно снизить неравномерность скорости. Но этого недостаточно чтобы получить астатический регулятор.
Основным способом достижения изохронизма было создание регуляторов с параболической траекторией движения грузов. Рассмотрим уравнение параболы
![]() , (10)
, (10)
где ![]() – параметр параболы. В нашем случае параметр
– параметр параболы. В нашем случае параметр ![]() равен значению поднормали, которая постоянна в любой точке траектории, то есть при любом расположении грузов. Значение поднормали определяет значение равновесной скорости, которая при движении грузов по параболической траектории рассчитывается по уравнению
равен значению поднормали, которая постоянна в любой точке траектории, то есть при любом расположении грузов. Значение поднормали определяет значение равновесной скорости, которая при движении грузов по параболической траектории рассчитывается по уравнению
![]() . (11)
. (11)
Так как в этом уравнении gи pпостоянные, то в любой точке параболической траектории возможна лишь одна равновесная скорость, равная ω, что соответствует астатическому.

Рис. 6. Центробежный регулятор Гарнетта: а – эскиз; б, в, г – модель из коллекции МГТУ.
Известно несколько различных конструкций параболических регуляторов. Отметим регулятор Гарнетта присутствующий в коллекции МГТУ (Рис. 6). Здесь грузы прикреплены к жесткой направляющей раме, задающей параболическую траекторию их движения [4].
Некоторые инженеры предлагали свои оригинальные механизмы для решения проблем статических регуляторов. Один из таких регуляторов был спроектирован немецким инженером Ф. Редтенбахером. Модель этого регулятора была создана студентом Московского Ремесленного Учебного Заведения (МРУЗ) Павлом Ивановым в 1862 году [8].

Рис. 7. а - центробежный регулятор Редтенбахера; б - его схема.
В регуляторе Редтенбахера грузы заменены кольцом (Рис. 7). Кольцо состоит из двух частей, одна из которых легче другой за счет проточки выполненной в виде дуги примерно в 160 градусов. При вращении кольцо через рычаги управляет перемещением муфты, которая в свою очередь воздействует на пусковой клапан паровой машины. Редтенбахер полагал таким образом создать чувствительный регулятор, не допускающий ошибки регулирования. Но в своих работах он писал, что данная модель не реализовала заложенную в нее идею [8].
Другая модель - регулятор Ф. Дженкина. Здесь тяжелая муфта выполнена в виде крышки, внутренняя часть которой служит направляющей для движения расходящихсягрузов (Рис. 8). Принцип действия регулятора состоит в том, что тяжелая муфта вращается вокруг главной оси и всегда находится под постоянным углом к этой оси. Грузы скользят по внутренней поверхности муфты-крышки, которая свободно посажена на ось. Давление на муфту всегда остается функцией скорости. Недостаток регулятора состоит в том, что равновесная скорость зависит от коэффициента трения скольжения между двумя поверхностями [2].

Рис. 8. а, б - центробежный регулятор Дженкина; в - его схема.
Много различных регуляторов было запатентовано, описано в литературе и построено до тех пор, пока Чебышев не показал, что оставаясь в пределах конструкций регулятора Уатта за счет простого излома стержней можно сделать регулятор с любым сколь угодно близким к нулю коэффициентом неравномерности.
В качестве отправной точки Чебышев выбрал регулятор с непрямыми пересекающимися рычагами [9, 10]. Используя принцип возможных перемещений, он получает выражение описывающее квадрат отношения равновесной скорости ![]() к регулируемой скорости
к регулируемой скорости ![]()
 . (12)
. (12)
Здесь ![]() - угол перегиба рычагов в точках крепления к оси,
- угол перегиба рычагов в точках крепления к оси, ![]() – угол наклона рычагов к оси при регулируемой скорости
– угол наклона рычагов к оси при регулируемой скорости ![]() , при измененной скорости
, при измененной скорости ![]() , угол изменится на некоторую величину
, угол изменится на некоторую величину ![]() ,
, ![]() - длина верхних рычагов. Коэффициенты
- длина верхних рычагов. Коэффициенты ![]() и
и ![]() введены для упрощения записи и равны соответственно
введены для упрощения записи и равны соответственно
![]() , (13)
, (13)
где ![]() вес муфты относительно принятого за единицу веса груза,
вес муфты относительно принятого за единицу веса груза, ![]() – длина рычагов от точки их крепления к оси до точки крепления грузов, длина рычагов от точки крепления к ручкам до точки перегиба также принята за единицу. При
– длина рычагов от точки их крепления к оси до точки крепления грузов, длина рычагов от точки крепления к ручкам до точки перегиба также принята за единицу. При ![]() отношение угловых скоростей должно равняться единице.
отношение угловых скоростей должно равняться единице.
Изохронизм регулятора предполагает одну равновесную скорость при всех возможных положениях муфты и, следовательно, при всех возможных величинах угла ![]() , то есть отношение равновесной скорости
, то есть отношение равновесной скорости ![]() к регулируемой скорости
к регулируемой скорости ![]() (12) должно быть равно единице. Используя разложение в ряд по степеням
(12) должно быть равно единице. Используя разложение в ряд по степеням ![]() и приравнивая к нулю коэффициенты при первых пяти степенях, получаем систему из пяти уравнений, решая которую определяем оптимальные значения параметров
и приравнивая к нулю коэффициенты при первых пяти степенях, получаем систему из пяти уравнений, решая которую определяем оптимальные значения параметров ![]() . Такой набор параметров позволяет снизить колебания скорости до 0.1%.
. Такой набор параметров позволяет снизить колебания скорости до 0.1%.
В зависимости от необходимой равновесной скорости, определялись радиусы кривизны рычагов. Отметим, что в отличие от общепринятых способов проектирования центробежных регуляторов, Чебышев не пренебрегает массой рычагов. Он проектирует тяги сложной формы с переменной шириной и радиусом кривизны. Например, на рис. 10 изображен регулятор, в котором регулирующая масса сосредоточена не только в самих грузах, но также в утяжеленных частях рычагов.

Рис 9. а - центробежный регулятор Чебышева с тяжелой муфтой; б, в - его эскизы.
Разработанные Чебышевым конструкции регуляторов были изготовлены в мастерских Императорского Московского Технического Училища (ИМТУ) и находятся в коллекции университета (Рис. 9, 10).

Рис. 10. а - центробежный регулятор Чебышева с изогнутыми утяжеленными рычагами; б - его схема.
На практике при использовании астатических регуляторов возникали серьезные проблемы. В процессе работы регулятор совершал колебательные движения, все время, проскакивая равновесную скорость, что было абсолютно неприемлемо. Помимо колебаний равновесной скорости существовала также проблема устойчивости регуляторов. При приближении частот двигателя к резонансным частотам регулятор «сходил с ума» - амплитуда колебаний муфты резко возрастала. Инженеры девятнадцатого века приложили много усилий для того чтобы избавиться от неустойчивости регуляторов. Например, французский физик Ж. Фуко считал, что неустойчивость может быть устранена уменьшением люфта в зубчатых передачах, провиса ременных передач [6] и пр. В 1871 году английский инженер Дж. Хэд писал, что решением этой проблемы является использование воздушного демпфера [11].
Для того, чтобы окончательно разобраться почему же возникает проблема устойчивости и генерации колебаний, проанализируем две основные работы по теории регулирования того времени. Сначала рассмотрим статью Максвелла, вышедшею в 1868 году [2, 12]. В работе он предпринимает попытку сформулировать основные принципы самой теории, не акцентируя внимания на конструктивных особенностях различных видов регуляторов. Максвелл пытается обратить внимание инженеров на то, что астатические регуляторы способны, по его мнению, с гораздо большей точностью поддерживать постоянство регулируемой скорости при изменении нагрузки или движущий силы. Этим объясняется создание большого количества различных моделей астатических регуляторов. Однако будучи увлеченным применением регуляторов в астрономических приборах Максвелл не отдавал себе отчета в том, какие значения параметров на практике определяют устойчивость регуляторов работающих в промышленности. Максвелл определяет некоторую область значений параметров, при которых возможна устойчивая работа астатических регуляторов. Не замечая при этом, что эта область значений не имеет практического смысла для обычных паровых машин. Из этой работы нельзя вынести какие либо практические советы по конструкции регуляторов.
Теория регулирования машин, отвечающая на вопросы промышленной практики, начинается работой Вышнеградского, вышедшей в 1876 году [2, 12]. Только из сравнения работ Максвелла и Вышнеградского можно по-настоящему понять, что сделано Вышнеградским. Он решил задачу динамики для регулятора Уатта и, в частности, доказал непригодность астатических регуляторов, в сущности, при помощи тех же уравнений на основании которых Максвелл сделал выводы о пригодности астатического регулятора
Вышнеградский получает математическое условие отсутствия самовозбуждения регулятора, что позволяет ему высказать два основных тезиса. В первом тезисе автор утверждает, что регулятор не может нормально функционировать, имея нулевой коэффициент неравномерности, то есть астатические регуляторы непригодны. Чем ближе регулятор к астатичности, тем меньше область значений параметров, при которых переходный процесс монотонный и если неравномерность регулятора достаточно мала, то колебания угловой скорости во время переходного процесса становятся неизбежными. Астатический регулятор в процессе работы будет совершать колебательные движения. Этот тезис Вышнеградского находится в прямом противоречии со стремлением Максвелла ввести в использование астатические регуляторы. Второй тезис – всякий регулятор для корректной работы должен иметь особое приспособление, порождающее вязкое трение [2].
После Вышнеградского у инженеров возникло понимание, в какую сторону влияют изменения тех или иных конструктивных параметров регулятора на возникновение самовозбуждения. Тогда, как к моменту появления работы, ни один инженер не мог гарантировать что сделанный им регулятор будет безотказно работать, так как было полное непонимание того, как влияют на устойчивость регулятора и на динамику регулирования параметры элементов механизма.
3. Псевдоастатические регуляторы
Благодаря работам Вышнеградского, на практике стали применяться регуляторы, у которых значение коэффициента неравномерности было достаточно малым для устойчивой работы регулятора, но при этом обеспечивало небольшие колебания скорости. Такие регуляторы получили название псевдоастатических регуляторов.

Рис. 11. а – центробежный регулятор Клея, б – центробежный регулятор Прёлля.
Рассмотрим модель регулятора Клея из коллекции МГТУ (Рис. 11а). Вопреки некоторым мнениям, регулятор является псевдоастатическим [13]. Так как точного определения псевдоастатических регуляторов не существует, то для приблизительной оценки мы будем считать псевдоастическими регуляторы, обладающие коэффициентом неравномерности ![]() [3]. Получить малый коэффициент неравномерности позволяют перекрещивающиеся тяги. Но такая реализация требует большой высоты конструкции, поэтому к недостаткам этой модели можно отнести её большие габариты.
[3]. Получить малый коэффициент неравномерности позволяют перекрещивающиеся тяги. Но такая реализация требует большой высоты конструкции, поэтому к недостаткам этой модели можно отнести её большие габариты.
Регулятор Прёлля (Рис. 11б) является удачной модификацией регулятора Клея, обеспечивая такие же небольшие колебания скорости при вдвое меньших размерах конструкции. Верхние тяги изогнуты, чтобы не мешать движению грузов, муфта имеет большую массу и грушеобразную форму. Отметим, что в отличие от классической конструкции рычаги с грузами в этом регуляторе направлены вверх [3, 14]. Известно несколько реализаций регулятора Прёлля (Рис. 12 а,б). Одна из них находится в коллекции МГТУ.
Определим равновесную скорость вращения регулятора Прёлля и построим его рабочую характеристику.

Рис. 12. а, б – эскизы различных конструкций регулятора Прёлля, в – его схема.
Выражение для равновесной скорости отличается от (9) наличием отношения высоты точки пересечения нижних и верхних рычагов (отрезок FM) к высоте крепления грузов (отрезок BM). Это отношение является переменной величиной, что позволяет уменьшить колебания равновесной скорости (14).
![]() . (14)
. (14)
На графике (Рис. 13) изображены рабочие характеристики трех видов регуляторов – статического, астатического и псевдоастатического. Видно, что характеристика астатического регулятора имеет вид вертикальной прямой, что соответствует отсутствию колебаний равновесной скорости. Кривая меньшего наклона соответствует псевдоастатическому регулятору, допускающему незначительные колебания равновесной скорости. Кривая большего наклона описывает работу статического регулятора, который характеризуется наибольшими колебаниями регулируемой скорости.
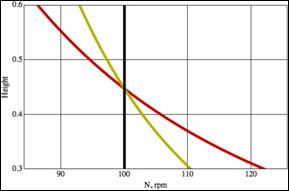
Рис. 13. Теоретические характеристики статического, астатического и псевдоастатического регуляторов.
4. Эксперимент
В рамках данной работы авторами был проведен эксперимент по определению рабочей характеристики одной из моделей регуляторов. В качестве объекта исследования использовалась модель регулятор Прёлля. Так как не было возможности оснастить модель двигателем, был использован следующий метод проведения эксперимента. К концу управляющего рычага была прикреплена линейка для измерения вертикального перемещения муфты. Для измерения частоты вращения вала использовался частотомер F5041, на вход которого подавался сигнал в 1.5 В (Рис. 14а). Цепь замыкалась, когда зуб колеса соприкасался с пластинкой, прикреплённой к источнику питания. Во время эксперимента, модель раскручивалась вручную так, что муфта поднималась из нижнего положения в верхнее. Эксперимент снимался на цифровую камеру. В результате, были получены значения частоты (записанные по показаниям частотомера) соответствующие определенному положению муфты, по которым была построена рабочая характеристика регулятора.
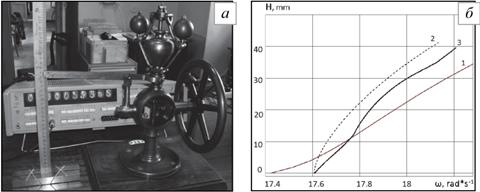
Рис. 14. а – экспериментальная установка;б – характеристики регуляторов, где 1 – регулятор Уатта, 2 – регулятор Прёлля, 3 – эксперимент.
На рис. 14б изображены графики экспериментальной и теоретических зависимостей положения муфты от угловой скорости вращения регулятора. Анализ этих зависимостей показывает, что экспериментальная зависимость не сильно отличается от расчетной, что в свою очередь, свидетельствует о корректности проведенного эксперимента. Кроме того, из сравнения расчетных кривых подтверждено преимущество регулятора Прёлля над регулятором Уатта. Видно, что регулятор Прёлля имеет меньший диапазон равновесных скоростей, соответствующий меньшему коэффициенту неравномерности.
5. Компьютерное 3-Dмоделирование регуляторов
За относительно небольшой исторических срок (около 50 лет) коллекции моделей в большинстве технических университетов были утрачены. Интерес к их сохранению возник примерно 15 лет назад, однако, проблема сохранения коллекций моделей существует и сегодня. Значительные коллекции собраны в технических музеях Лондона, Парижа, Мюнхена и Москвы, но там они чаще всего хранятся в запасниках и недоступны для посетителей. Так же нельзя забывать об их хрупкости и уникальности, многие модели сохранились лишь в единственном экземпляре. С развитием компьютерных технологий стало возможным создание 3-Dмоделей, позволяющих демонстрировать работу регулятора в движении, показывать модель в разрезе, демонстрировать сборку модели из отдельных деталей, проводить расчеты и моделировать рабочие процессы. Хранение трехмерных моделей на цифровых носителях позволяет сохранить сами модели, а так же при необходимости перевести их в чертежи и изготовить копии.
В данной работе авторами были созданы трехмерные модели некоторых из рассмотренных регуляторов, в том числе регуляторы Прёлля, Редтенбахера, Чебышева (Рис. 15). Разработка моделей происходила с помощью программного пакета AutodeskInventor 2010 (www.autodesk.com). Для каждого регулятора была создана библиотека составных элементов – оснований, грузов, тяг, зубчатых колес, крепежных деталей и так далее. Из этих элементов были собраны целые модели, которые полностью воспроизводят работу механизмов.
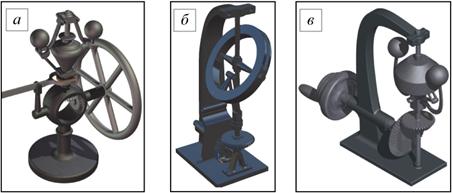
Рис. 15. 3-Dмодели: а – регулятор Прёлля,б – регулятор Редтенбахера, в – регулятор Чебышева.
Заключение
Одной из основных задач истории техники является атрибуция, при которой определяется когда были созданы исследуемые объекты, кто были их создатели и изготовители. Важной частью этой работы является анализ условий, в которых они появились, выявление причин, которые способствовали их разработке. Большое разнообразие конструкций центробежных регуляторов [13, 14] говорит о том, что предшествующие модели не удовлетворяли возрастающим требованиям. Попытка устранить недостатки статических регуляторов с помощью астатических оказалась заблуждением. Новые конструкции астатических регуляторов были неустойчивыми, не обеспечивали качественного регулирования. Однако на их основе были выявлены причины нестабильного поведения и созданы псевдоастатические регуляторы, которые были работоспособны в новых условиях работы, при большей скорости и мощности. Теоретические исследования центробежных регуляторов заложили основы теории автоматического управления.
Также в данной работе с помощью математического моделирования типовых регуляторов подтверждено преимущество псевдоастатических регуляторов над другими видами. Моделирование проводилось на основе результатов основных трудов по теории регуляторов, собранных в лекциях профессоров ИМТУ [3, 4, 5]. Был проведен эксперимент по определению рабочей характеристики регулятора Прёлля. Анализ результатов эксперимента доказал превосходство псевдоастатических регуляторов над прочими видами. С помощью программного пакета AutodeskInventor 2010 были созданы наиболее интересные модели центробежных регуляторов. Такие модели играют важную роль в понимании принципов работы этих механизмов, а также помогают сохранять и воссоздавать уникальные модели.
Центробежные регуляторы являются важной вехой в истории развития механизмов и машин. На сегодняшний день они активно используются в инженерном образовании. Например, немецкая фирма GUNT (www.gunt.de) создает оборудование для проведения лабораторных работ, позволяющее определять экспериментально характеристики основных видов регуляторов.
Список литературы
1. Sakharov, M. In: The Models of Centrifugal Governors in the Collection of BMSTU, Proceedings of EUCOMES 2010 / M. Sakharov, N. Manychkin, V. Tarabarin. - Springer, Heidelberg,2010, pp. 511-518.
2. Максвелл, Д.К. Теория автоматического управления / Д.К. Максвелл, И.А. Вышнеградский, А. Стодола. – М.: Академия Наук СССР, 1949.
3. Зернов, Д.С. Теория паровых машин / Д.С. Зернов. – М.: ИМТУ, 1896.
4. Зернов, Д.С. Построение паровых Машин / Д.С. Зернов. – М.: ИМТУ, 1895.
5. Орлов, Ф.Е.Паровые машины / Ф.Е. Орлов. – М.: ИМТУ, 1890.
6. Bennett, S. A History of Control Engineering 1800–1930, Institution of Electrical Engineers / S. Bennet. - London and Peter Peregrinus Ltd., Stevenage, UK, 1979.
7. Mayr, O. The Origins of Feedback Control, English Edition / O. Mayr. - MIT Press, Cambridge, MA, 1970.
8. Golovin, A. Russian Models from the Mechanisms Collection of Bauman University / A. Golovin, V. Tarabarin. - Springer, Heidelberg, 2008.
9. Чебышев, П.Л. Полное собрание сочинений / П.Л. Чебышев. – М.: Академия Наук СССР, 1946.
10. Артоболевский, И.И. Механизмы П.Л. Чебышева / И.И. Артоболевский, Н.И. Левитский. – М.: Академия Наук СССР, 1945.
11. Head, J. In: On a simple construction of steam engine governor having a close approximation to perfect action, Proceedings of the Institution of Mechanical Engineers, Vol. 22 / J. Head. - 1871, pp. 213-228.
12. Меркин, Д.Р. Введение в теорию устойчивости / Д.Р. Меркин. – М.: Наука, 1976.
13. Header, H. A Handbook on the Steam Engine / H. Header. - Crosby Lockwood and Son, London, 1902.
14. Hopkins, A. Scientific American Reference Book / A. Hopkins, A. Bond. - MUNN & Co., NY, 1914.
Публикации с ключевыми словами: 3D-моделирование, паровые машины, теория автоматического управления, модели механизмов, история науки и механизмов, центробежный регулятор
Публикации со словами: 3D-моделирование, паровые машины, теория автоматического управления, модели механизмов, история науки и механизмов, центробежный регулятор
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||