научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 09, сентябрь 2013
DOI: 10.7463/0913.0617210
УДК 62-83:621.313.13.014.2
Россия, МГТУ им. Н.Э. Баумана
Введение
В следящих вентильных электроприводах, учитывая особенности их работы и конструкции вентильных двигателей (ВД), используются в основном реверсивные бесконтактные тахогенераторы постоянного тока (БТГПТ). Среди них наименьшим отношением амплитуды пульсаций выходного напряжения (помехи) к крутизне характеристики преобразования при высоком быстродействии обладают тахогенераторы, принцип действия которых основан на умножении выходных напряжений синхронного тахогенератора (СТГ) на синусоидальные функции угла поворота его ротора [1]. Эти свойства позволяют эксплуатировать их во многих случаях без сглаживающих фильтров, действие которых при низких частотах вращения электродвигателя становится малоэффективным и, кроме того, вносит в электропривод дополнительное запаздывание.
Для формирования синусоидальных функций угла поворота СТГ в рассматриваемых реверсивных БТГПТ, как показано в [1], должны использоваться датчики его магнитного потока, т.е. по сути встроенные в его корпус датчики положения ротора (ДПР) СТГ. ВД в качестве составного узла также содержит ДПР, вырабатывающий информационные сигналы о положении ротора ВД, которыми управляется полупроводниковый коммутатор, формирующий фазные токи электрической машины ВД [2, 3]. При одинаковом числе пар полюсов ВД и СТГ функции их ДПР могут быть совмещены и для управления преобразованием напряжений в БТГПТ использоваться ДПР электродвигателя.
В ВД используются как дискретные, так и аналоговые ДПР, выдающие непрерывные напряжения, изменяющиеся, например, по синусоидальному закону в зависимости от угла поворота ротора [2-8].
При невысоких требованиях к уровню пульсаций выходного напряжения в БТГПТ может быть использоваться дискретный ДПР, выходными напряжениями которого управляются аналоговые ключи, осуществляющие фазочувствительное выпрямление переменных напряжений СТГ. Тем самым выполняется умножение этих напряжений на логические функции выходных напряжений ДПР. Некоторое уменьшение пульсаций выходного напряжения таких БТГПТ достигается изготовлением входящих в них СТГ с трапецеидальной фазной ЭДС [9-12].
Синусоидальными выходными напряжениями обладают ДПР с магниточувствительными элементами в виде элементов Холла или «гигантских» магниторезисторов [1-4, 7 ,8], а также синусно-косинусные вращающиеся трансформаторы (СКВТ) и резольверы [1-6]. Полупроводниковые магниточувствительные элементы имеют невысокую температурную стабильность, значительный разброс выходных параметров, требуют тщательного позиционирования при их установке в ДПР [7, 8]. СКВТ обладают не только значительной устойчивостью к изменению параметров внешней среды и низкой чувствительностью к воздействию помех, но и значительной точностью, что и определило их применение в качестве ДПР в следящих вентильных электроприводах [3-6].
При использовании в ВД ДПР типа СКВТ возможно совмещение им одновременно и функций СТГ. Это достигается при питании его квадратурной обмотки возбуждения постоянным током и последующим разделением составляющих выходных напряжений фильтрами нижних и верхних частот [4, 13]. В результате уменьшаются массогабаритные показатели, момент инерции и стоимость электромеханической части электропривода, но при этом из-за подмагничивания магнитопровода СКВТ постоянной составляющей уменьшается максимально допустимая амплитуда его выходных напряжений, а отсутствие квадратурной обмотки в резольвере не позволяет реализовать на нем одновременно ДПР и СТГ.
Гармонические напряжения с амплитудой, прямо пропорциональной частоте вращения ВД, могут быть получены также дифференцированием выходных напряжений синусно-косинусного ДПР при помощи аналоговых дифференциаторов с RC-цепями [14]. В реальном исполнении [14] эти дифференциаторы имеют нелинейную амплитудно-частотную характеристику и зависящий от частоты вносимый фазовый сдвиг, а, самое главное, очень чувствительны к электрическим и электромагнитным помехам. Указанные недостатки в значительно меньшей степени проявляются у дифференцирующих трансформаторов.
Целью работы является создание на основе синусно-косинусного ДПР ВД тахометрического устройства с дифференцирующими элементами в виде трансформаторов, анализ линейности его выходной характеристики и пульсаций выходного напряжения.
Научную новизну работы составляют обоснование применения трансформаторов в качестве дифференцирующих элементов созданного на базе синусно-косинусного ДПР ВД тахометрического устройства, предложенные методы линеаризации его выходной характеристики, анализа пульсаций выходного напряжения и определения их относительной амплитуды.
1. Обоснование применения трансформаторов в качестве дифференцирующих элементов тахометрического устройства следящего вентильного электропривода
Возможность работы трансформаторов в качестве дифференцирующих элементов показана в [15]. Рассмотрим особенности их применения в тахометрических устройствах вентильных электроприводов с синусно-косинусными ДПР ВД на примере реверсивного БТГПТ, предложенного в [16]. Его принцип действия поясняет функциональная схема, представленная на рисунке 1.

Рисунок 1 - Функциональная схема реверсивного БТГПТ с дифференцирующими трансформаторами
Первичные обмотки трансформаторов Т1, Т2 БТГПТ присоединены через резисторы R1, R2 соответственно к синусному «sin» и косинусному «cos» выходам ДПР, а к вторичным подключены входы блоков умножения БУ1, БУ2. Вторые входы этих блоков перекрёстными связями соединены с выходами ДПР, а к их выходам подключены входы сравнивающего элемента СЭ, выход которого является выходом БТГПТ.
Анализ работы БТГПТ первоначально проведём при ряде упрощающих допущений:
1) примем, что магнитопроводы трансформаторов изготовлены из материала с практически линейной зависимостью индукции от напряжённости магнитного поля и не насыщены;
2) не учитываем неоднородность магнитного поля в магнитопроводах трансформаторов и определяем напряжённость и индукцию по их значениям на средней магнитной линии;
3) пренебрежём потерями в стали и влиянием гистерезиса на форму ЭДС обмоток трансформаторов;
4) будем считать, что сопротивления нагрузки трансформаторов очень велики, и ток нагрузки равен нулю.
Принятые допущения позволяют рассматривать трансформаторы БТГПТ как работающие в режиме холостого хода идеализированные трансформаторы, в которых между амплитудой тока в первичных обмотках I1m и амплитудой магнитного потока Фm соблюдается линейная зависимость
 , (1)
, (1)
где w1- число витков первичной обмотки трансформатора; Sс- площадь поперечного сечения магнитопроводе трансформатора; lср- длина средней линии магнитопровода трансформатора mr- относительная магнитная проницаемость материала магнитопровода; μ0 = 4π×10-7 Гн /м - магнитная постоянная.
При вращении ДПР напряжения на его синусном uс(t) и косинусном uк(t) выходах изменяются по зависимостям
![]() , (2)
, (2)
![]() , (3)
, (3)
где Kдпр – коэффициент передачи ДПР; UВ - напряжение возбуждения ДПР; ωэ = pэΩ – угловая частота выходных напряжений ДПР; pэ- число пар полюсов ВД; Ω – частота вращения ВД.
По подобным (2), (3) зависимостям изменяются и токи в первичных обмотках трансформаторов Т1, Т2. Их подобие обеспечивается выполнением условия
![]() ,
,
где ωэ max- угловая частота выходных напряжений ДПР при максимальной частоте вращения ВД; L1- индуктивность рассеяния первичной обмотки трансформатора; М - взаимная индуктивность обмоток трансформатора.
При этом у токов в первичных обмотках трансформаторов, а также у магнитных потоков в их магнитопроводах будут практически неизменные амплитуды во всём диапазоне изменения частоты выходных напряжений ДПР. Тогда на вторичных обмотках трансформаторов индуктируются напряжения с прямо пропорциональной частоте вращения ВД амплитудой
 , (4)
, (4)
 , (5)
, (5)
где u2.1(t), u2.2(t) - напряжения на вторичных обмотках трансформаторов Т1, Т2; w2 - число витков вторичной обмотки трансформатора.
Блоки умножения БУ1, БУ2 перемножают функции, соответственно, (2), (5) и (3), (4), и на их выходах получают напряжения
![]() , (6)
, (6)
![]() . (7)
. (7)
Сравнивающий элемент СЭ выполняет алгебраическое суммирование напряжений (6), (7). Выражение его выходного напряжения с учётом (1) имеет вид
 , (8)
, (8)
где  - коэффициент передачи БТГПТ.
- коэффициент передачи БТГПТ.
Из (8) следует, что выходное напряжение БТГПТ с идеализированными трансформаторами прямо пропорционально мгновенному значению частоты вращения ВД и не содержит переменных составляющих, образующих пульсации.
2. Линеаризация выходной характеристики тахометрического устройства
При практической реализации данного БТГПТ с реальными трансформаторами в преобразуемые ими сигналы вносятся искажения, приводящие при увеличении частоты вращения к снижению коэффициента передачи и возникновению пульсаций выходного напряжения. Причинами, вызывающими эти искажения, являются наличие гистерезиса материалов магнитопроводов трансформаторов, влияние сопротивлений нагрузки и несовершенство резисторных стабилизаторов амплитуды и фазы токов первичных обмоток. Последнюю из них несложно устранить заменой резисторов R1, R2 (рисунок 1) двухполярными стабилизаторами тока, выполненными на операционных усилителях.
Гистерезис вызывает не только искажение формы ЭДС обмоток трансформаторов, приводящих к возникновению пульсаций выходного напряжения БТГГПТ, но и вносит фазовый сдвиг этих ЭДС относительно токов первичных обмоток и, соответственно, относительно выходных напряжений ДПР [17]. Покажем, что скомпенсировать влияние этого фазового сдвига, а также сопротивления нагрузки, т.е. входного сопротивления блоков умножения, на коэффициент передачи дифференцирующего трансформатора можно подключением к его вторичной обмотке компенсирующего конденсатора. Для этого воспользуемся схемой замещения дифференцирующего трансформатора на рисунке 2, при составлении которой содержащееся в нём нелинейное звено с петлёй гистерезиса линеаризовано методом гармонической линеаризации [17]. При использовании этого метода применительно к трансформатору петля гистерезиса магнитопровода заменяется эквивалентным эллипсом с центром в начале координат, учитывающим создаваемый этой нелинейностью фазовый сдвиг. В схеме замещения трансформатора (рисунок 2) при синусоидальном токе или напряжении его первичной обмотки такая замена отражается ветвью, содержащей индуктивность Lm и резистор Rm.

Рисунок 2 - Схема замещения дифференцирующего трансформатора
Далее заменим параллельное соединение нагрузки трансформатора и компенсирующего конденсатора на эквивалентное последовательное соединение резистивного и ёмкостного элементов с сопротивлениями
 , (9)
, (9)
 , (10)
, (10)
где Rн', Xсн' - приведённые к первичной обмотке трансформатора сопротивления нагрузки и компенсирующего конденсатора.
По схеме замещения трансформатора (рисунок 1) определяем приведённое комплексное напряжение на нагрузке трансформатора
 , (11)
, (11)
где Rm- активное сопротивление намагничивающей ветви трансформатора, учитывающее потери мощности в магнитопроводе; Xm = 𝜔эLm- индуктивное сопротивление намагничивающей ветви трансформатора; R2', X2' - приведённые к первичной обмотке активное сопротивление провода и индуктивное сопротивление вторичной обмотки трансформатора.
Запишем выражение (11) в показательной форме
 , (12)
, (12)
где δ- угол магнитного запаздывания или угол потерь материала магнитопровода трансформатора.
Аргументы комплексных сопротивлений в (12) определяются по формулам
 , (13а)
, (13а)
 , (13б)
, (13б)
 . (13в)
. (13в)
Из (12) получим описывающую функцию дифференцирующего трансформатора
 , (14)
, (14)
которая представляет собой комплексное сопротивление. При скомпенсированном фазовом сдвиге в (14) φтр = π/2, а трансформатор эквивалентен идеальной индуктивности. Для этого необходимо обеспечить выполнение условия
![]() . (15)
. (15)
Используя соотношение (15), определим ёмкость компенсирующего конденсатора. Подставим (13б), (13в) в (15) и, принимая во внимание, что при малых углах tgα ≈ 𝛼, получим уравнение
 . (16)
. (16)
Решая уравнение (16) относительно Xсэ' и учитывая, что Rm + R2' + Rнэ' »Rнэ', находим
 . (17)
. (17)
При замене Rнэ' и Xсэ' в (17) выражениями (9), (10) это равенство преобразуется в квадратное уравнение, при решении которого с учётом принятых выше упрощающих допущений будем иметь
 . (18)
. (18)
Тогда ёмкость компенсирующего конденсатора для обеспечения линейной зависимости выходного напряжения исследуемого БТГПТ от частоты вращения ВД будет равна
 , (19)
, (19)
где k12 = w1 / w2 - коэффициент трансформации дифференцирующего трансформатора.
3. Анализ пульсаций выходного напряжения тахометрического устройства
Для анализа пульсаций выходного напряжения БТГПТ из-за искажений формы ЭДС дифференцирующих трансформаторов представим симметричную кривую петли гистерезиса их магнитопроводов B = f(H) в виде суммы двух зависимостей B = f1(H) ±f2(H) [17], в которой f1(H) описывает основную кривую намагничивания, а f2(H) отклонение петли гистерезиса от неё. Знак минус в этом выражении записывается при увеличении тока первичной обмотки трансформатора, а знак плюс при его уменьшении. При малых значениях напряжённости Н магнитного поля основная кривая намагничивания f1(H) электротехнической стали и ферритов подчиняется закону Релея и даже без воздушного зазора в магнитопроводе носит линейный характер [18]. Зависимость отклонения петли гистерезиса от основной кривой намагничивания нелинейная и её математическое описание может сделано только приближённо.
Выбор метода аппроксимации и аппроксимирующей функции кривой f2(H) зависит от формы петли гистерезиса магнитопровода трансформатора, которую несложно снять экспериментально. На рисунках 3а - 3в показаны экспериментальные гистерезисные петли магнитопровода дифференцирующего трансформатора, полученные при частотах тока первичной обмотки fэ соответственно 10, 50 и 400 Гц.

Рисунок 3 - Осциллограммы петель гистерезиса магнитопровода дифференцирующего трансформатора: а) fэ = 10 Гц, б) fэ = 50 Гц, в) fэ = 400 Гц
При проведении эксперимента использовался дифференцирующий трансформатор с w1 = 400, w2 = 4000 и тороидальным магнитопроводом типоразмера К 31×18,5×7, выполненным из марганец-цинкового феррита М2000НМ. Основные параметры этих частных петель гистерезиса, т.е. максимальные значения напряжённости Hm' и индукции Bm', коэрцитивная сила Hc' и остаточная индукция Br', при I1m = 4 мА приведены в таблице.
Таблица - Параметры петли гистерезиса ферритового магнитопровода дифференцирующего трансформатора
f, Гц | Hm', А/м | Bm', Тл | Hc', А/м | Br', Тл |
10 | 20,5 | 0,086 | 1,54 | 0,0053 |
50 | 20,5 | 0,086 | 1,86 | 0,0071 |
100 | 20,5 | 0,086 | 2,06 | 0,0080 |
200 | 20,5 | 0,086 | 2,20 | 0,0086 |
300 | 20,5 | 0,086 | 2,40 | 0,0095 |
400 | 20,5 | 0,086 | 3,08 | 0,0114 |
Узость петель гистерезиса материала магнитопровода дифференцирующих трансформаторов (рисунки 3а - 3в) при малых значениях напряжённости магнитного поля позволяет применить для их математического описания метод кусочно-линейной аппроксимации, основывающийся на использовании в качестве аппроксимирующих функций линейных зависимостей. Аппроксимированная частная петля гистерезиса изображена на рисунке 4.
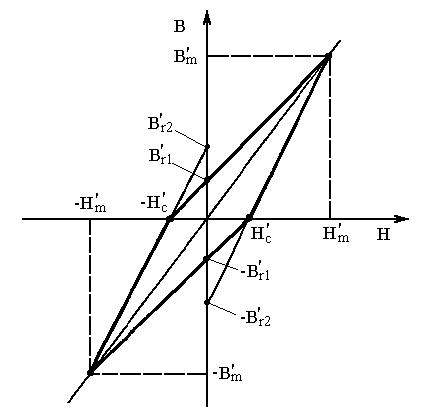
Рисунок 4 - Аппроксимированная петля гистерезиса магнитопровода дифференцирующего трансформатора
Её построение начинается с проведения через начало координат и точки, соответствующие Hm', Bm' и -Hm', -Bm', основной (прямой) линии намагничивания. Параметры Hm' и Bm' рассчитываются по формулам
 , (20)
, (20)
![]() , (21)
, (21)
где μн - начальная магнитная проницаемость материала магнитопровода.
Далее из точки с координатами Hm', Bm' через точки, соответствующие -Hc', 0 и Hc', 0, проводятся прямые. Принимая во внимание кососимметричность петли гистерезиса, подобное построение выполняется и из точки с координатами -Hm', -Bm'. В точках пересечения проведённых прямых с осью ординат определяются параметры аппроксимации петли гистерезиса Br1', Br2', представляющие собой остаточные индукции. Коэрцитивную силу Hc', используемую для построения аппроксимированной петли гистерезиса при отсутствии экспериментальных данных, можно определить, основываясь на теории физического подобия электромагнитных полей с учётом нелинейности и гистерезиса, из соотношения
 , (22)
, (22)
где Hm, Bm - максимальные значения напряжённости и индукции предельной петли гистерезиса.
Аппроксимированная петля гистерезиса позволяет записать аналитические зависимости индукции в магнитопроводах и напряжений на вторичных обмотках дифференцирующих трансформаторов от угла поворота ротора ДПР ВД. Принцип определения этих зависимостей поясним для положительной полуволны синусоидального тока первичной обмотки трансформатора Т1 (рисунок 1). При повороте ротора ДПР на угол 0 ≤ α < αп индукция в магнитопроводе и напряжение на вторичной обмотке дифференцирующего трансформатора Т1 изменяются по зависимостям
![]() , (23)
, (23)
 . (24)
. (24)
В выражениях (23), (24)
 ,
,
а угол αп, соответствующий точке перегиба аппроксимированной петли гистерезиса, составляет
 .
.
При αп ≤ α < π /2, вводя обозначение
 ,
,
имеем
![]() , (25)
, (25)
 , (26)
, (26)
а при π /2 ≤α<π соответственно
![]() , (27)
, (27)
. (28)
По полученным выражениям выходных напряжений дифференцирующих трансформаторов также поэтапно определяются выходные напряжения блоков умножения БУ1, БУ2 (рисунок 1), используя которые методом припасовывания в соответствии с принципом работы БТГПТ рассчитывается зависимость его выходного напряжения от угла поворота ротора ДПР ВД. Результаты её расчёта показывают, что выходное напряжение БТГПТ с дифференцирующими трансформаторами содержит пульсации, периодичность которых кратна 4рэ за оборот ротора ДПР, а относительная амплитуда не превышает
 .
.
4. Результаты экспериментальных исследований
Экспериментальные исследования технических характеристик макетного образца БТГПТ с указанными выше дифференцирующими трансформаторами проводились при работе его в следящем вентильном электроприводе с непрерывным токовым управлением ВД типа ДБМ 120-1-0,4-2. Основу его ДПР составляет СКВТ типа ВТ 60-12-0,4-0,16-С28. В электроприводе используется пропорционально-интегральный регулятор частоты вращения, поэтому его регулировочные характеристики, представленные на рисунках 5,6, фактически являются выходными характеристиками БТГПТ.
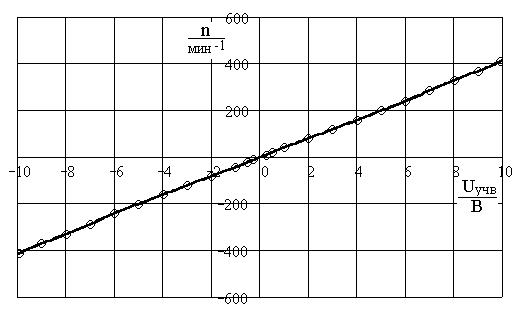
Рисунок 5 - Регулировочная характеристика следящего вентильного электропривода

Рисунок 6 - Регулировочная характеристика следящего вентильного электропривода при малых частотах вращения
Их анализ показывает, что рабочий диапазон частот вращения БТГПТ в обоих направлениях 0,5 - 400 мин-1, а нелинейность выходной характеристики менее ± 1,25 %. Пульсации выходного напряжения БТГПТ при постоянной времени его фильтра нижних частот 1,5 мс во всём диапазоне частот вращения, в том числе и при максимальной, не превышали ± 4 %.
Заключение
Обосновано применение трансформаторов в качестве дифференцирующих элементов реверсивного бесконтактного тахогенератора постоянного тока, созданного на базе синусно-косинусного датчика положения ротора вентильного двигателя.
Показано, что нелинейность зависимости выходного напряжения реверсивного бесконтактного тахогенератора постоянного тока от частоты вращения, вызываемая гистерезисом материала магнитопроводов дифференцирующих трансформаторов и влиянием сопротивлений их нагрузки, устраняется подключением компенсирующих конденсаторов к вторичным обмоткам этих трансформаторов. Получено аналитическое выражение для расчёта ёмкости компенсирующих конденсаторов.
Предложен метод анализа пульсаций выходного напряжения реверсивного бесконтактного тахогенератора постоянного тока и определения их относительной амплитуды по параметрам петли гистерезиса материала магнитопроводов дифференцирующих трансформаторов.
Список литературы
1. Бродовский В.Н., Каржавов Б.Н., Рыбкин Ю.П. Бесколлекторные тахогенераторы постоянного тока. М.: Энергоиздат, 1982. 128 с.
2. Овчинников И.Е. Вентильные электрические двигатели и привод на их основе (малая и средняя мощность). СПб.: КОРОНА-Век, 2007. 336 с.
3. Герман-Галкин С.Г. Matlab & Simulink. Проектирование мехатронных систем на ПК. СПб.: КОРОНА-Век, 2008. 368 с.
4. Микеров А.Г. Электромеханические датчики и электронные компоненты управляемых вентильных двигателей. СПб.: СПБГЭТУ (ЛЭТИ), 1999. 60 с.
5. Воротников С.А. Информационные устройства робототехнических систем. М.: Изд-во МГТУ им. Н.Э. Баумана, 2005. 384 с.
6. Балковой А.П., Цаценкин В.К. Прецизионный электропривод с вентильными двигателями. М.: Издательский дом МЭИ, 2010. 328 с.
7. Бараночников М.Л. Микромагнитоэлектроника. Т.1. М.: ДМК Пресс, 2001. 544 с.
8. Designing a Disc Magnet for use with Infineon GMR Sensors. Edition 2011-10-15. Published by Infineon Technologies AG, Munich, Germany. Режим доступа: http://www.infineon.com/dgdl/Designing_Disc_Magnet_for_Angle_Sensor+v1.0.pdf?folderId=db3a30431ce5fb52011d4cae1f582dad&fileId=db3a304332fc1ee7013311aab3fc3cc4 (дата обращения 31.05.2013).
9. Thalheim K., Homburg D., Reiff E.-Ch. Analoge und digitale Dreh-zahlmessung: Tendenz bei Tachogeneratoren und Drehimpulsgeber // Antriebstechnik. 1987. No. 9. P. 38-40.
10. Wilhelmy L., Doege D. Moderne Drehzahl-Istwertaufnemehmer für die Antriebs- und Regelungstechnik // Technik Report. 1988. No. 10. P. 28-30.
11. Homburg D., Reiff E.C. Bürstenlose Gleistromtachos sind auf dem Vormarsch // Elektrotechnik (Schweiz). 1988. No. 9. P. 22-23.
12. Крывой В.Н., Самодуров В.П., Ральникова Е.А. Бесконтактные тахогенераторы постоянного тока со встроенными датчиками положения ротора на базе магниточувствительных микросхем // II Всесоюзная научно-техническая конференция по электромеханотронике: материалы. Ч. 2. Л.: ЛДНТП, 1991. С. 128-130.
13. Епифанова Л.М., Куликов В.Н., Микеров А.Г., Яковлев А.В. Реверсивный вентильный электродвигатель: а.с. 1297186 СССР. 1987. Бюл. № 10.
14. Боровиков М. А., Доманов В. И., Нашатыркин Е. М. Следящий вентильный электропривод с вычислителями координат по сигналам датчика положения ротора двигателя // Электричество. 1990. № 10. С. 76-80.
15. Иващенко Н.Н. Автоматическое регулирование. Теория и элементы систем. М.: Машиностроение, 1973. 606 с.
16. Ланген А.М., Соловьев В.А., Волынкин В.В. Вентильный электропривод: а.с. 1390765 СССР. 1988. Бюл. № 15.
17. Гёльднер К., Кубик С. Нелинейные системы управления: пер. с нем. М.: Мир, 1987. 368 с.
18. Толмасский И.С. Высокочастотные магнитные материалы. М.:Энергия, 1968. 72 с.
Публикации с ключевыми словами: вентильный электропривод, бесконтактный тахогенератор постоянного тока, синусно-косинусный датчик положения ротора, дифференцирующий трансформатор
Публикации со словами: вентильный электропривод, бесконтактный тахогенератор постоянного тока, синусно-косинусный датчик положения ротора, дифференцирующий трансформатор
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||