научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 07, июль 2013
DOI: 10.7463/0713.0602237
УДК 629.7.085
Украина, Национальный аэрокосмический университет
им. Н.Е. Жуковского «Харьковский авиационный институт»
1. Введение
Абсолютное большинство современных пневматических наземных катапульт обладают регрессивным законом тягового усилия вследствие ограниченного (конечного) объема воздушных аккумуляторов давления (ВАД). Тяговое усилие в таких устройствах передается на беспилотный летательный аппарат (БЛА) посредством гибкой трансмиссии – полиспастного механизма с постоянным передаточным числом. Степень регрессии тягового усилия катапульты в этом случае обычно составляет не менее 25% [1], что влечет за собой необходимость соответствующего увеличения разгонного пути для достижения заданной скорости ввода в полет по сравнению аналогом, в котором обеспечивается постоянство перегрузки.
Потребность размещения катапульт на шасси ограниченных линейных размеров и площади (трейлерах, кузовах, катерах и т.д.) повлекла за собой разработку систем с переменным передаточным числом трансмиссии. Например, в катапульте фирмы TheInsituGroupInc[2] для запуска БЛА судового базирования используется копир, профиль которого выбран из условия компенсации падения тягового усилия пневмопривода.
Проектирование пневматических катапульт, обладающих наилучшими массогабаритными характеристиками, связано с решением задачи оптимизации, которая направлена на получение минимальной длины направляющей при заданной скорости ввода в полет БЛА.
В зависимости от выбора внутрисистемных переменных (например, угла наклона касательной к копиру), через которые выражается характеристический критерий (например, длина направляющей) может изменяться метод оптимизации. Однако вне зависимости от их выбора решение подобной задачи непрямыми методами (сведением к уравнению Эйлера) затруднительно, а при учете нестационарности рабочего процесса в цилиндре и ВАД – зачастую невозможно. Таким образом, метод решения задачи оптимизации неразрывно связан с типом конструкции НПУ и способом организации рабочего процесса.
В данной статье приведен однопараметрический итерационный метод оптимизации динамических характеристик наземной пневматической катапульты с целью сокращения участка разгона БЛА.
2. Принцип действия вариатора
Получение более совершенных характеристик НПУ возможно только за счет глубокой модернизации трансмиссии, которая выражается в придании ей свойств вариатора, т.е. возможности изменять передаточное число. Среди немногих конструкций вариаторов НПУ применением сразу несколько инновационных решений (жесткая трансмиссия и пневматический цилиндр с оппозитным расположением поршней) отличается катапульта Super Wedge уже упомянутого производителя – TheInsituGroupInc[3].
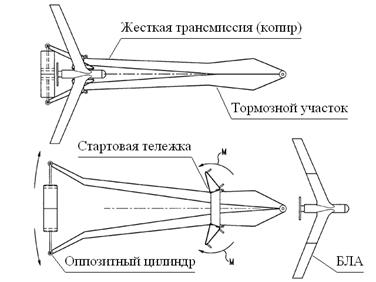
В отличие от рассматриваемого в [4] НПУ, где профиль копира статичен и выполняет роль направляющей, в данном случае направляющая-копир состоит из двух половинок, которые синхронно изменяют угол наклона в процессе работы (рис. 1). Такое техническое решение позволяет получить постоянное или почти постоянное ускорение стартовой тележки (и БЛА), несмотря на падение давления в ВАД к концу рабочего цикла [3, 4].
Однако, крайне малый диапазон изменения угла наклона направляющей-копира 4º…8º не позволяет варьировать передаточное число в широких пределах и применим для расширительных машин низкой степени регрессии. Кроме того, передаваемое на БЛА усилие изменяется согласно тригонометрической закономерности ![]() (при увеличивающемся
(при увеличивающемся ![]() ), имеет экстремум в центре направляющей и качественно идентично циклограмме, полученной для вариатора [5].
), имеет экстремум в центре направляющей и качественно идентично циклограмме, полученной для вариатора [5].
Тем не менее, лежащий в основе принцип силового воздействия на тележку позволяет перейти к вариатору полиспастного типа, действующего по закону ![]() (при уменьшающемся угле
(при уменьшающемся угле ![]() ) [6]. Кинематическая схема полиспастного механизма представляет собой прямоугольный треугольник, в котором гипотенуза образована тросом (рис. 2). В вершинах треугольника располагаются шкивы, один из которых поднят относительно направляющей на постоянную высоту
) [6]. Кинематическая схема полиспастного механизма представляет собой прямоугольный треугольник, в котором гипотенуза образована тросом (рис. 2). В вершинах треугольника располагаются шкивы, один из которых поднят относительно направляющей на постоянную высоту ![]() , а другой подвижен. Изменение передаточного числа осуществляется за счет увеличения угла наклона троса по мере продвижения тележки (и БЛА) вдоль направляющей.
, а другой подвижен. Изменение передаточного числа осуществляется за счет увеличения угла наклона троса по мере продвижения тележки (и БЛА) вдоль направляющей.
|
|
Рис. 1. Катапульта фирмы TheInsituGroupInc, с жесткой трансмиссией [3] | Рис. 2. Схема вариатора-полиспаста, реализующего закон |

3. Проектный инструментарий
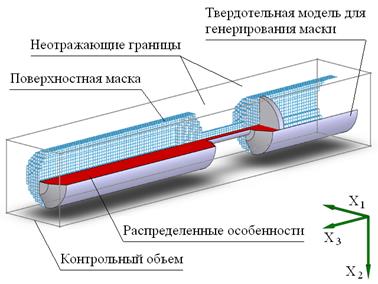
Расчет параметров любого объекта техники, которому присущ ряд значительных новшеств, должен проводится с помощью физико-математической модели высокой степени проработки, подобно [7]. В данной работе использовалась комплексно-сопряженная модель НПУ, которая отображает нестационарный пространственный процесс в пневмоцилиндре (рис. 3, а) совместно с положением подвижных частей механической трансмиссии.
Наружное и внутреннее течение среды в цилиндре расширительной машины определяется системой из 9 уравнений газовой динамики, которая в векторно-матричных терминах выглядит следующим образом:
 , (1)
, (1)
где  – обобщенные потоковые вектор–матрицы;
– обобщенные потоковые вектор–матрицы;  – вектор–матрица конвективных и волновых процессов;
– вектор–матрица конвективных и волновых процессов; ![]()
![]() – проекции вектор–матрицы конвективных и волновых процессов на оси координат;
– проекции вектор–матрицы конвективных и волновых процессов на оси координат;  – вектор–матрица «свободных» источников–стоков (ИС);
– вектор–матрица «свободных» источников–стоков (ИС); ![]() – вектор напряженности поля массовых сил;
– вектор напряженности поля массовых сил; ![]() ,
, ![]() ,
, ![]() – проекции вектора напряженности;
– проекции вектора напряженности; ![]() – плотность;
– плотность; ![]() – внутренняя энергия по полным параметрам;
– внутренняя энергия по полным параметрам; ![]() – общее число групп ИС, обусловленных субстанциональным переносом;
– общее число групп ИС, обусловленных субстанциональным переносом; ![]() – общее число групп «свободных» ИС;
– общее число групп «свободных» ИС; ![]() – орты прямоугольной системы координат;
– орты прямоугольной системы координат; ![]() – индекс направления в пространстве;
– индекс направления в пространстве; ![]() – индексы групп особенностей.
– индексы групп особенностей.
Решения эволюционной задачи получено конечно-разностным методом С.К. Годунова, реализованным на регулярной временной сетке в декартовой системе координат. С целью отображения различных физических факторов модели используется механизм ИС массы импульса и энергии. Для определения параметров невозмущенного автономного течения используется решение задачи о распаде произвольного разрыва. На непроницаемых стенках применяется решение задачи о взаимодействии однородного потока газа с преградой. В качестве однопараметрической модели турбулентности используется метод нормирования аппроксимационной вязкости.
В состав условий однозначности универсальной модели течения входят термическое и калорическое уравнениями состояния идеального газа, соотношение Майера, предположение об аддитивности теплофизических свойств среды, начальные и граничные условия, а также соотношения, определяющие интенсивности ИС. Граничными условиями для газотермодинамической модели также служит механическая подмодель трансмиссии (рис. 3, б), которая записана на основании уравнения Лагранжа II рода.
а |
б |
Рис. 3. Структурная схема комплексно-сопряженной модели НПУ: | |

4. Особенности в постановке задачи оптимизации
В качестве управляющего параметра используется критичная для данной конструкции характеристика – угол наклона троса ![]() . Критерием эффективности, позволяющим количественно произвести оценку проектного решения, является длина направляющей
. Критерием эффективности, позволяющим количественно произвести оценку проектного решения, является длина направляющей ![]() . Целевой функцией выступает работа НПУ по перемещению полезного груза вдоль направляющей
. Целевой функцией выступает работа НПУ по перемещению полезного груза вдоль направляющей ![]() .
.
Для нахождения наилучшей конфигурации НПУ решается задача условной параметрической оптимизации, т.е. ищется допустимое значение управляющего параметра ![]() , при которой достигается оптимальное значение
, при которой достигается оптимальное значение ![]() целевой функции
целевой функции ![]() :
:
![]()
при том, что множество допустимых решений ![]() задается системой ограничений типа неравенств по стартовой перегрузке
задается системой ограничений типа неравенств по стартовой перегрузке ![]() и скорости ввода в полет БЛА
и скорости ввода в полет БЛА ![]() :
:
![]() ;
;
![]() .
.
Таким образом, задача поиска оптимального значения угла наклона троса ![]() состоит в отыскании максимального значения работы привода НПУ в области допустимых решений
состоит в отыскании максимального значения работы привода НПУ в области допустимых решений ![]() :
:
![]() .
.
В качестве критерия, позволяющего количественно оценить степень оптимальности проектного решения, выступает площадь под диаграммой тягового усилия, которая соответствует работе ![]() по перемещению БЛА вдоль направляющей [7]. Наилучшим считается тот вариант НПУ, отклонение тягового усилия
по перемещению БЛА вдоль направляющей [7]. Наилучшим считается тот вариант НПУ, отклонение тягового усилия ![]() которого от постоянного значения
которого от постоянного значения ![]() будет стремиться к минимуму на каждом пространственном интервале
будет стремиться к минимуму на каждом пространственном интервале ![]() :
:
 , (3)
, (3)
где ![]() – коэффициент полноты циклограммы тяги (КПЦТ).
– коэффициент полноты циклограммы тяги (КПЦТ).
Таким образом, задача оптимизации катапульты в данной постановке не сводится к отысканию вариации функционала, т.к. функция известна и расчет ведется по готовому виду устройства. Согласно представленной на рис. 4 структурной схеме каждая итерация представляет собой решение краевой задачи с ограничениями в виде закона перемещением подвижных границ привода и трансмиссии. После каждой итерации – проведения численного эксперимента (ЧЭ) – с помощью (3) проводится сравнение вариатора собственной разработки с идеальной и фирменной катапультами.

Рис. 4. Структурная схема метода параметрической оптимизации
Задача оптимизации в случае неизменной точки закрепления троса ![]() (рис. 2) и длине направляющей
(рис. 2) и длине направляющей ![]() дополнительно упрощается ввиду того, что наперед заданные граничные значений угла наклона троса, полностью определяют геометрию полиспаста, что позволяет получить решение, задавая лишь начальное положение
дополнительно упрощается ввиду того, что наперед заданные граничные значений угла наклона троса, полностью определяют геометрию полиспаста, что позволяет получить решение, задавая лишь начальное положение ![]() .
.
Для сокращения «мертвой» длины направляющей, образованной катетом прямоугольного треугольника, целесообразно принять начальное значение угла ![]() близким к 90º. Однако, передаточное число при этом будет принимать минимальное значение, а усилие растяжения троса – максимальное. Поэтому для предотвращения разрушения гибкой трансмиссии рационально принять исходный угол
близким к 90º. Однако, передаточное число при этом будет принимать минимальное значение, а усилие растяжения троса – максимальное. Поэтому для предотвращения разрушения гибкой трансмиссии рационально принять исходный угол ![]() равным 75º (табл. 1).
равным 75º (табл. 1).
Несмотря на то, что эффективность трансмиссии при величине угла наклона троса 0º достигает максимального значения (передаточное число ![]() ), трос становится параллельным направляющей и трансмиссия перестает выполнять свои функции. Поэтому нижний предел
), трос становится параллельным направляющей и трансмиссия перестает выполнять свои функции. Поэтому нижний предел ![]() принимается равным 5º при котором прямоугольный треугольник не вырождается.
принимается равным 5º при котором прямоугольный треугольник не вырождается.
Таким образом, в диапазоне ![]() все решения допустимы с точки зрения обеспечения достаточно высокого передаточного числа (
все решения допустимы с точки зрения обеспечения достаточно высокого передаточного числа (![]() ) и конструктивно реализуемы.
) и конструктивно реализуемы.
5. Оптимальная конфигурация пневматической катапульты и анализ ее характеристик
На рис. 5 изображен фазовый срезы рабочей области, который отображает мгновенное состояние газотермодинамических и механических характеристик НПУ в виде цветовых карт физических полей и графиков.
Повышение температуры газа в цилиндре незначительно, т.к. малое удлинение расширительной машины сокращает объем зон торможения потока (рис. 6, см. физические поля температуры). Пониженная температура среды не способствует заметному сокращению интенсивности волнового процесса (по причине снижения скорости распространения колебаний), т.к. вследствие малого объема цилиндра происходит реверберация волн и их усиление. Наполнение свежим зарядом цилиндров с удлинением менее 3 калибров происходит значительно эффективнее камер с длинным цилиндром [5] (рис. 5, см. физические поля концентрации).
На рис. 6-7 представлена динамика сходимости метода оптимизации применительно к НПУ с вариатором полиспастного типа, передаточное число которого изменяется по закону ![]() .
.
Таблица 1. Диапазоны изменения угла наклона троса ![]()
№ итерации, i | 0 | 1 | 2 | 3 | 4 |
Интервал изменения угла наклона | – | 75…20 | 70…15 | 65…10 | 60…5 |
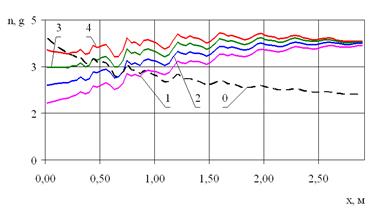
Сравнение полученных в численном эксперименте интегральных динамических характеристик НПУ без вариатора (рис. 6, поз. 0) и с вариатором (поз. 1-4) свидетельствуют о лучшем наполнении диаграммы усилия к концу рабочего цикла. Изменение угла наклона троса в диапазоне 60º…5º (поз. 4) не только способствует компенсации падения тягового усилия НПУ на конечном участке направляющей, но и позволяет получить начальное значение усилия максимально приближенное к исходному (поз. 0). Таким образом, можно констатировать наибольшее соответствие рассматриваемой конфигурации постоянному закону усилия среди всех рассматриваемых типов вариаторов. Кроме того, при соответствующей настройке трансмиссии (поз. 1) данный вариатор можно отнести к числу немногих катапульт, обладающих прогрессивным законом изменения тягового усилия.
Короткий ход поршня расширительной машины (при идентичной площади) позволяет получить перегрузку с наименьшим количеством всплесков (рис. 6). Рассматриваемая трансмиссия обеспечивает уникальный закон распределения перегрузки, имеющий не ярко выраженный экстремум в середине разгонного пути (поз. 4). В зависимости от задачи (например, для обеспечения более плавного запуска БЛА) изменение угла наклона троса позволит получить прогрессивный закон перегрузки (поз. 1).
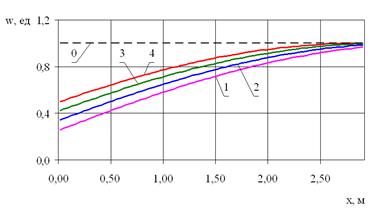
Характер набора скорости изменяется от прогрессивного (рис. 7, поз. 1) к более желанному линейному (поз. 4), обеспечивающему сокращение длины разгона на 28% по сравнению с классической пневматической НПУ (поз. 0). Использование двухстепенного полиспаста в конструкции (вместо 4-кратного, как в [5]) позволяет сократить скорость перемещения самого троса и повысить надежность трансмиссии: исключить вероятность перехлестывания или нарушения кинематических связей между тросами.

Рис. 5. Фаза подачи сжатого воздуха в рабочий цилиндр и страгивание БЛА
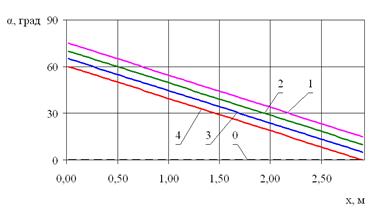
Изменение угла наклона троса в зависимости от координаты положения БЛА на направляющей имеет линейный характер (рис. 8), что обусловлено конструкцией трансмиссии, в основе которой лежит прямоугольный треугольник. С точки зрения надежности НПУ принципиальные различия в представленном диапазоне отсутствуют (поз. 1-4).
На рис. 9 изображены графики изменения передаточного числа трансмиссии в зависимости от положения БЛА на направляющей для рассматриваемого вариатора. Зависимости свидетельствуют, что вариатор является повышающим, однако максимальное передаточное число не может быть выше ![]() (рис. 9). Поэтому для достижения заданной перегрузки в начальный момент времени давление в ВАД должно быть выше номинального значения (предусмотренного для классических НПУ).
(рис. 9). Поэтому для достижения заданной перегрузки в начальный момент времени давление в ВАД должно быть выше номинального значения (предусмотренного для классических НПУ).
|
|
Рис. 6. Расчетные значения перегрузки, действующей на БЛА | Рис. 7. Динамика набора скорости при движении БЛА по направляющей |
|
|
Рис. 8. Изменение угла наклона троса при различных итерациях | Рис. 9. Передаточное число вариатора |

6. Заключение
Верификация модели с использованием апробированных результатов натурных исследований, полученных другими авторами [3, 4], демонстрирует удовлетворительный для практических нужд уровень согласования и непротиворечивость полученных результатов относительно известных данных.
Для проведения одного численного эксперимента, т.е. одной итерации, необходимо около 100 ч машинного времени сетки средней мощности. Параметрические методы оптимизации могут быть развиты на базе предложенных моделей и при сохранении линейной тенденции развития аппаратно-программного обеспечения и через несколько лет позволят получать результат в реальном масштабе времени.
Список литературы
1. Середа В.А. Классификация законов распределения тягового усилия наземных пусковых устройств беспилотных летательных аппаратов // Авиационно-космическая техника и технология. 2010. № 4 (71). С. 63-66.
2. Официальный сайт фирмы TheInsituGroupInc. Режим доступа: http://www.insitu.com/systems/launch-and-recovery/launch-systems (дата обращения 20.05.2013).
3. Brain T. McGeer, Andreas H. von Flotow, Cory Roeseler. Methods and apparatuses for launching unmanned aircraft, including releasably gripping aircraft during launch and breaking subsequent grip motion : United States Patent No. US 7,165,745 B2. Date of Patent: Jan. 23, 2007.
4. Brain D. Dennis, Clifford Jackson, Brain T. McGeer, Andreas H. von Flotow. Methods and apparatuses for capturing and recovering unmanned aircraft, including extendable capture device: United States Patent No. US 7,066,430 B2. DateofPatent: Jun. 27, 2006.
5. Середа В.А., Авилов И.С. Оптимизация динамических характеристик пневматического пускового устройства беспилотного летательного аппарата // Авиационно-космическая техника и технология. 2010. № 6 (73). С. 23-27.
6. Середа В.О. Спосіб компенсації падіння тягового зусилля привода катапульти : пат. України на корисну модель № 65105. 2011. Бюл. № 22. 3 с.
7. Середа В.А. Комплексно-сопряженная модель пневмогидравлического наземного пускового устройства беспилотного летательного аппарата // Открытые информационные и компьютерные интегрированные технологии. 2011. № 50. С. 17-24.
8. Середа В.А. Оптимизация динамических характеристик катапульты с телескопическим приводом // Вопросы проектирования и производства конструкций летательных аппаратов: сб. науч. тр. Нац. аэрокосм. ун-та им. Н.Е. Жуковского «ХАИ». Харьков, 2012. Вып. 2 (70). C. 34-41.
Публикации с ключевыми словами: беспилотный летательный аппарат, наземная катапульта, гибкая трансмиссия, передаточное число, предельно допустимая стартовая перегрузка
Публикации со словами: беспилотный летательный аппарат, наземная катапульта, гибкая трансмиссия, передаточное число, предельно допустимая стартовая перегрузка
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||