научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
#6 июнь 2006
УДК 62-82
Д.Н. Попов, Д.С. Чвялев
СОСТАВЛЕНИЕ И ИССЛЕДОВАНИЕ МАТЕМАТИЧЕСКОЙ МОДЕЛИ ЭЛЕКТРОГИДРАВЛИЧЕСКОГО ПРИВОДА ДЛЯ ДИНАМИЧЕСКИХ ИСПЫТАНИЙ АРМАТУРЫ ЖЕЛЕЗОБЕТОННЫХ КОНСТРУКЦИЙ
Аннотация.
Составлена нелинейная математическая модель гидропривода для динамических испытаний арматуры железобетонных конструкций. Особенностью гидроцилиндра привода является применением в нем гидростатических опор. Проанализирована степень влияния членов, входящих в нелинейную модель, введен ряд допущений, на основании которых был осуществлен переход к линейной математической модели. По линейной модели исследовалась динамика гидропривода. Результаты расчетов подтверждены экспериментальными исследованиями.
Введение.
В настоящее время в мостостроении остро встал вопрос о динамических испытаниях арматуры железобетонной конструкций моста и способов ее закрепления в анкер. Арматурой железобетонной конструкции является высокопрочный канат марки 15К7 [1]. Динамические испытания позволят уточнить характеристики каната, такие как надежность, долговечность и другие.
Основную сложность при проведении таких испытаний составляют требования по моделированию реальных динамических законов, действующих на канат, при эксплуатации моста. В реальных условиях канат испытывает сложный закон нагружения, который условно можно разбить на две составляющие: статическое и динамическое нагружение. Статическое нагружение возникает от действия постоянных нагрузок – предварительное натяжение каната, восприятие им массы моста и т.д. Динамическое нагружение возникает от действия знакопеременных нагрузок – движение транспорта, порывы ветра и т.д.
В настоящее время в России высокопрочные канаты испытывают при статическом нагружении до разрыва [2]. Существуют также стенды, испытывающие канаты при динамическом нагружении, но их параметры не удовлетворяют современным требованиям. За рубежом существуют аналоги гидравлических стендов, позволяющих проводить испытания канатов при нагрузке, максимально приближенной к реальной. Такие стенды разработаны фирмами Sсhenсk [3], MTS [4]. При сравнительном анализе гидроприводов видно, что зарубежные аналоги значительно дороже российских. В связи с чем встал вопрос о разработке современного испытательного гидропривода, удовлетворяющего всем параметрам нагружения каната.
 Основываясь на опытных данных строительства
и эксплуатации мостов, закон нагружения каната можно представить графиком,
показанном на рисунке 1. В этом случае
Основываясь на опытных данных строительства
и эксплуатации мостов, закон нагружения каната можно представить графиком,
показанном на рисунке 1. В этом случае
![]()
![]()
![]()
![]()

Рис. 1. График закона нагружения испытуемого каната: ![]() – усилие, нагружающее
канат;
– усилие, нагружающее
канат; ![]() – время;
– время;
![]() – период
колебаний;
– период
колебаний; ![]() –
частота колебаний
–
частота колебаний
статическая нагрузка составляет 150 кН, при такой нагрузке канат подвергается динамическому воздействию с амплитудой по усилию 10 кН и частотой 0 – 100 Гц. Указанный диапазон частот необходим для сокращения времени испытаний каната.
1. Описание гидропривода испытательной установки.
Принципиальная схема гидропривода показана на рисунке 2. Гидропривод
состоит из следующих устройств: насосной станции 1, в которую, кроме основного
насоса, входит струйный насос для сбора утечек из гидроопор;
электрогидравлического усилителя (ЭГУ) 2 и гидроцилиндра (ГЦ) 3 с двумя
проходными штоками, имеющие гидростатические опоры. В линиях питания и слива
расположены пневмогидроаккумуляторы 4, необходимые для гашения пульсаций
давления в напорной и сливной гидролиниях. Примененный двухкаскадный ЭГУ типа
“С100-20” изготовлен на ПКЗАО “Завод Гидроавтоматики” г.
С-Петербурга. В первый
каскад входят электромеханический преобразователь (ЭМП) сухого типа и четыре
элемента сопло-заслонка, управляющих золотником второго каскада. Отличительной
особенностью ЭГУ является его работа по схеме гидравлического моста с четырьмя регулируемыми
сопротивлениями. Рабочая жидкость подается через два первых сопла под торцы
золотника и сливается через вторую пару сопел. Заслонка, расположенная между
соплами, отклоняется под действием силы, вызванной в обмотках ЭМП при подаче к
ним управляющего напряжения ![]() . Отклонение заслонки вызывает перепад
. Отклонение заслонки вызывает перепад ![]() давления на торцах
золотника. Под действием созданной этим перепадом силы золотник смещается,
соединяя одну полость ГЦ с линией питания, а другую с линией слива. Вследствие
возникшей разности давлений
давления на торцах
золотника. Под действием созданной этим перепадом силы золотник смещается,
соединяя одну полость ГЦ с линией питания, а другую с линией слива. Вследствие
возникшей разности давлений ![]() поршень ГЦ начинает перемещаться. Обратные
связи от золотника второго каскада и поршня ГЦ обеспечиваются с помощью
индуктивных датчиков. Основной
поршень ГЦ начинает перемещаться. Обратные
связи от золотника второго каскада и поршня ГЦ обеспечиваются с помощью
индуктивных датчиков. Основной

![]() Рис.
2. Принципиальная схема гидропривода
Рис.
2. Принципиальная схема гидропривода
особенностью ГЦ являются гидростатические опоры штока поршня. Такие опоры применены в связи с невозможностью использования контактных уплотнений по двум причинам: во-первых, при заданной частоте колебаний температура в зоне контакта уплотнения и штока превышает допустимые для резины значения, что приводит к быстрому износу уплотнения; во-вторых, сила сухого трения в зоне контакта приводит к значительному искажению формируемого гидроприводом закона нагружения каната. Для получения обратной связи по нагрузке ГЦ снабжен датчиками давления.
3. Составление нелинейной математической модели гидропривода.
При проектировании гидропривода испытательной машины необходимо решить следующие проблемы: обеспечение заданных рабочих режимов, получение наилучших энергетических характеристик, повышение технологичности, надежности и долговечности, автоматизация управления, уменьшение затрат на изготовление и другие. Для решения этих проблем необходимо составить и исследовать математическую модель, адекватную реальной конструкции гидропривода испытательной машины.
В основу математических моделей положены перечисленные ниже уравнения.
Уравнение расхода жидкости через дросселирующие устройства типа сопло-заслонка и цилиндрический золотник
![]() ,
(1)
,
(1)
где
![]() - коэффициент
проводимости дросселирующего элемента;
- коэффициент
проводимости дросселирующего элемента; ![]() - расстояние между кромками щели
дросселирующего отверстия;
- расстояние между кромками щели
дросселирующего отверстия; ![]() - перепад давления на дросселирующем
устройстве.
- перепад давления на дросселирующем
устройстве.
Уравнение расходов, поступающих под торцы золотника
 ,
(2)
,
(2)
где
![]() - площадь торца
золотника;
- площадь торца
золотника; ![]() -
объем полостей перед торцами золотника;
-
объем полостей перед торцами золотника; ![]() - модуль объемной упругости жидкости; i = 1, 2; знак плюс записывается для индекса 1; знак минус
– для индекса 2.
- модуль объемной упругости жидкости; i = 1, 2; знак плюс записывается для индекса 1; знак минус
– для индекса 2.
Уравнение расходов жидкости, втекающего и вытекающего из полости гидроцилиндра
 ,
(3)
,
(3)
где
![]() - рабочая
площадь поршня гидроцилиндра;
- рабочая
площадь поршня гидроцилиндра; ![]() - величина смещения поршня;
- величина смещения поршня; ![]() и
и ![]() - объемы рабочей жидкости в
полостях гидроцилиндра и в подводящих трубопроводах;
- объемы рабочей жидкости в
полостях гидроцилиндра и в подводящих трубопроводах; ![]() - расходы жидкости, поступающие в
полости гидроцилиндра из гидроопоры;
- расходы жидкости, поступающие в
полости гидроцилиндра из гидроопоры; ![]() - коэффициент перетечки жидкости по поршню.
- коэффициент перетечки жидкости по поршню.
Уравнение движения золотника
 ,
(4)
,
(4)
где
![]() - масса
золотника;
- масса
золотника; ![]() - коэффициент
трения;
- коэффициент
трения; ![]() -
коэффициент жесткости гидродинамической пружины.
-
коэффициент жесткости гидродинамической пружины.
Уравнение движения поршня
 ,
(5)
,
(5)
где
![]() - масса поршня
вместе с испытуемым образцом;
- масса поршня
вместе с испытуемым образцом; ![]() - смещение штока;
- смещение штока; ![]() - коэффициент трения;
- коэффициент трения; ![]() - жесткость испытуемого
образца;
- жесткость испытуемого
образца; ![]() -
усилие, прикладываемое к испытуемому образцу.
-
усилие, прикладываемое к испытуемому образцу.
Полученная система уравнений (1) - (5) описывает динамику всего гидропривода испытательной машины. Она является полностью замкнутой, если к приведенным уравнениям добавить начальные и граничные условия.
Предварительные расчеты позволили оценить динамические процессы в двух каскадах ЭГУ и ГЦ, а также степень влияния членов, входящих в дифференциальные уравнения, на рабочих частотах. Расчеты показали, что быстродействие первого и второго каскадов настолько выше быстродействия ГЦ, что нелинейности, сжимаемость жидкости, массы, а также жидкостное трение в этих каскадах практически не оказывают влияние на работу последующих звеньев гидропривода. Учет же этих параметров значительно увеличивает “жесткость” системы уравнений без видимого уточнения результатов.
Исходя из вышеизложенного, составим линейную математическую модель гидропривода за счет дополнительных допущений и ограничений.
4. Составление линейной математической модели гидропривода.
При составлении линейной математической модели рассматривались малые отклонения переменных относительно своих установившихся значений, соответствующих нейтральному положению золотника [5]. Сигнал управления гидроприводом является линейной функцией, поэтому в изображении по Лапласу имеет вид:
![]() ,
(6)
,
(6)
где ![]() - входное напряжение с
блока питания ЭГУ;
- входное напряжение с
блока питания ЭГУ; ![]() ,
,
![]() - коэффициенты
обратных связей;
- коэффициенты
обратных связей; ![]() -
коэффициент усиления.
-
коэффициент усиления.
Уравнение, описывающее изменение тока управления в обмотках ЭМП, также является линейным. После преобразования по Лапласу оно может быть представлено в виде
![]() ,
(7)
,
(7)
где ![]() – коэффициент передачи;
– коэффициент передачи;  – постоянная времени
выходной цепи усилителя.
– постоянная времени
выходной цепи усилителя.
Уравнение, описывающее движение якоря ЭМП
![]() ,
(8)
,
(8)
где  – постоянная времени
якоря ЭМП;
– постоянная времени
якоря ЭМП;  –
коэффициент относительного демпфирования якоря;
–
коэффициент относительного демпфирования якоря;  – коэффициент передачи.
– коэффициент передачи.
Учитывая симметрию левой и правой полостей ЭГУ, а также, что давления управления при нейтральном положении заслонки равны, получим уравнение для расхода жидкости, управляющей золотником, в следующем виде
![]() ,
(9)
,
(9)
где ![]() ,
, ![]() – коэффициенты передачи;
– коэффициенты передачи; ![]() – разность управляющих
давлений в полостях ЭГУ.
– разность управляющих
давлений в полостях ЭГУ.
Уравнение движения золотника с учетом сделанных выше допущений примет вид
![]() , (10)
, (10)
где коэффициент
жесткости гидродинамической пружины ![]() подсчитан при перепаде давлений в полостях
ГЦ, равном
подсчитан при перепаде давлений в полостях
ГЦ, равном ![]() .
Этот перепад давлений соответствует статической нагрузке.
.
Этот перепад давлений соответствует статической нагрузке.
Аналогично уравнению (9), линеаризуем реальную расходно-перепадную характеристику второго каскада ЭГУ. После преобразования она примет вид
![]() ,
(11)
,
(11)
где ![]() ,
, ![]() - коэффициенты линеаризации.
- коэффициенты линеаризации.
Уравнение движения поршня в изображениях по Лапласу примет вид
![]() ,
(12)
,
(12)
где  – механическая постоянная
времени ГЦ;
– механическая постоянная
времени ГЦ;  –
–
коэффициент
относительного демпфирования;  – коэффициент передачи.
– коэффициент передачи.
По уравнениям (6) – (12) была составлена структурная схема следящего гидропривода рассмотренной испытательной машины (рис. 4).

Рис. 4. Структурная схема гидропривода
На
схеме введены следующие обозначения: ![]() ,
, ![]() - передаточные функции ЭГУ и гидроцилиндра
соответственно;
- передаточные функции ЭГУ и гидроцилиндра
соответственно;  -
расход жидкости, поступающий через гидростатические опоры в полости
гидроцилиндра.
-
расход жидкости, поступающий через гидростатические опоры в полости
гидроцилиндра.
Передаточные функции имеют вид
 ;
;
 .
.
В
результате получены безразмерная логарифмическая амплитудная  и фазовая
и фазовая ![]() характеристики для всего
гидропривода (рис. 5), где
характеристики для всего
гидропривода (рис. 5), где ![]() - текущая величина логарифмической
амплитудной характеристики;
- текущая величина логарифмической
амплитудной характеристики; ![]() - ее максимальная величина;
- ее максимальная величина; ![]() - частота. Характеристики
позволяют находить амплитудное значение входного напряжения
- частота. Характеристики
позволяют находить амплитудное значение входного напряжения ![]() , необходимое для создания заданной
амплитуды колебания нагрузки, а также частоту среза, до которой амплитуда
выходного сигнала остается практически постоянной.
, необходимое для создания заданной
амплитуды колебания нагрузки, а также частоту среза, до которой амплитуда
выходного сигнала остается практически постоянной.
При расчете характеристик учитывался возможный перекос штока в гидростатических опорах и, возникающий при этом, характер изменения сил трения и расходов жидкости в них. Расчет показал, что влияние перекоса штока на динамику

Рис. 5. Логарифмические амплитудная и фазовая характеристики
гидропривода происходит на частоте около 500 Гц (на рис. 5 отмечено красным) и поэтому не будет влиять на рабочие режимы гидропривода.
5. Экспериментальное определение динамических характеристик гидропривода.
На основе теоретических исследований и расчетов на ЭВМ был создан опытный образец гидропривода, который способен создавать нагрузку до 300 кН при частоте колебаний до 100 Гц. На опытном образце проверялось подтверждение динамических характеристик гидропривода, гидроцилиндр которого был снабжен гидростатическими опорами.
Фотография экспериментальной установки представлена на рис. 6. Установка состоит из насосной станции и закрепленного на горизонтальной станине гидроцилиндра. Гидропневмоаккумуляторы подсоединены к входной и выходной магистралям

Рис. 6. Фотография экспериментальной установки
гидропривода и позволяют гасить пульсации давления. Экспериментальный образец каната закрепляется в специальных цанговых зажимах. К полостям цилиндра подключены датчики давления, с помощью которых контролируется усилие нагружения испытательного образца. Бесконтактный датчик перемещения контролирует среднее положение поршня в гидроцилиндре при предварительном натяжении. Давления питания гидропривода и гидростатических опор контролируется по манометрам.
Результаты расчетов и экспериментальных исследований динамики
гидропривода сравниваются на рис. 7. На нем представлены графики безразмерной
логарифмической амплитудной характеристики ![]() , полученной экспериментально (сплошная
линия) и расчетом на ЭВМ (штриховая линия). Сравнение результатов проведенных
для гидропривода в целом, показало отличие не более, чем на 7%.
, полученной экспериментально (сплошная
линия) и расчетом на ЭВМ (штриховая линия). Сравнение результатов проведенных
для гидропривода в целом, показало отличие не более, чем на 7%.
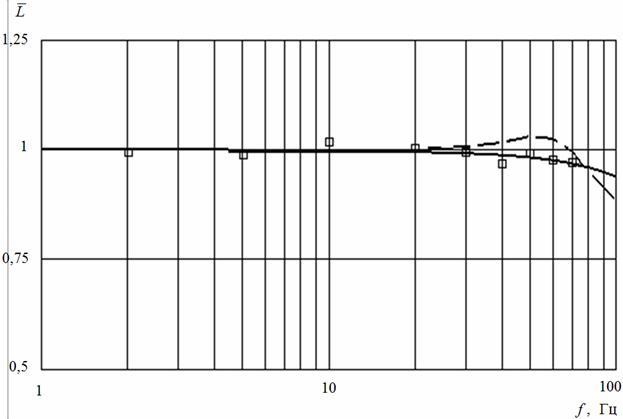
Рис. 7. Сравнительные динамические характеристики гидропривода
Заключение.
В испытательных машинах для моделирования динамических воздействий на арматуру железобетонных конструкций целесообразно применять электрогидравлический следящий привод с обратными связями по положению выходного звена и по разности давлений в гидроцилиндре.
Разработанная математическая модель электрогидравлического привода, учитывающая интегральные характеристики гидростатических опор, достоверно описывает динамические процессы в испытательной машине при частотных испытаниях каната на всем рабочем диапазоне. Сравнение результатов моделирования с результатами экспериментов подтверждают правомерность сделанных допущений при разработке модели. А разработанная конструкция испытательной машины может использоваться для испытаний канатов с максимальной статической нагрузкой до 300 кН, амплитудой нагружения до 10 кН и частотой колебаний до 70 Гц.
Список литературы.
1. ГОСТ 13840-68. Канаты стальные арматурные 1х7. Технические условия. – М.: Издательство стандартов, 1995. – 7 с.
2. ГОСТ 12004-81. Сталь арматурная. Методы испытания на растяжение. – М.: Издательство стандартов, 1986. – 15 с.
3. Шенк. Стандартные машины Гидропульс серии PSB: Проспект. – Дармштадт: Карл Шенк АГ, Р2802/3 ч.
4. MTS Shock and vibration testing from the world leader in dynamic test system: Prospect. – Minneapolis: MTS systems corporation, 1987. – 16 p.
5. Попов Д.Н. Динамика и регулирование гидро- и пневмосистем. – М.: Машиностроение, 1987. – 464 с.
Публикации с ключевыми словами: математическая модель, динамические испытания, мостостороение
Публикации со словами: математическая модель, динамические испытания, мостостороение
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||