научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 06, июнь 2013
DOI: 10.7463/0613.0569281
УДК 62-52
Россия, МГТУ им. Н.Э. Баумана
Введение
В системах управления разнообразными объектами широкое применение в качестве исполнительных механизмов получили электрогидравлические следящие приводы (ЭГСП), управляемые электрогидравлическими усилителями мощности (ЭГУ). Такие приводы во многом определяют динамические характеристики всей системы управления, ее надежность, энергетические показатели и массу составляющих систему устройств. Несмотря на большой объем научно-исследовательских и опытно-конструкторских работ, проводимых при создании ЭГСП, к настоящему времени еще не решена проблема выбора оптимальных проектных вариантов. Это ограничивает возможности достижения прорывных результатов при разработке новых образцов ЭГСП. Сложность указанной проблемы состоит в том, что для выбора оптимального проектного варианта ЭГСП необходимо учитывать ряд противоречащих друг другу требований, обеспечивающих оптимальность всей системы управления [1-3]. При этом существующая практика создания новых ЭГСП часто основана на опыте конструктора и его интуиции, что не гарантирует оптимальность принятых решений вследствие неполного отражения влияния параметров на характеристики проектируемого изделия. Рассмотренная в статье концепция имеет научную новизну, содержащуюся в методике последовательной оптимизации с выделением двух уровней ЭГСП.
1 Постановка задачи многокритериальной оптимизации
Многокритериальную задачу определения оптимального проектного варианта в общем виде можно сформулировать следующим образом [4], [5]:
![]()
![]()
где ![]() – n-мерный вектор управляющих варьируемых параметров,
– n-мерный вектор управляющих варьируемых параметров, ![]() – пространство допустимых значений варьируемых параметров;
– пространство допустимых значений варьируемых параметров; ![]() – целевые функции (критерии),
– целевые функции (критерии), ![]() – пространство допустимых значений критериев, определяемое, как множество
– пространство допустимых значений критериев, определяемое, как множество ![]() ; и
; и ![]() – система ограничений, накладываемых на проектное решение техническим заданием.
– система ограничений, накладываемых на проектное решение техническим заданием.
Следует заметить, что многие варьируемые параметры в задаче оптимизации любого технического устройства необходимо выбирать из рядов предпочтительных размеров и располагаемой номенклатуры унифицированных аппаратов или сборочных единиц.
Критерии, как правило, противоречивы, в связи с чем не существует математически строгих решений, доставляющих одновременно всем целевым функциям экстремальные значения. В таких случаях рассматривают «эффективные решения» ![]() – такие, в которых невозможно улучшить значение любого из критериев без ухудшения значений одного или нескольких других критериев [6]. Это условие называют принципом Парето, а множество всех эффективных решений - множеством Парето.
– такие, в которых невозможно улучшить значение любого из критериев без ухудшения значений одного или нескольких других критериев [6]. Это условие называют принципом Парето, а множество всех эффективных решений - множеством Парето.
2 Методы решения задачи многокритериальной оптимизации
Один из способов выбора решения задачи многокритериальной оптимизации (МКО) из множества Парето – применение аппроксимированной функции предпочтений конструктора, представленной в виде той или иной свертки нормализованных критериев [7]. Аппроксимация функции предпочтений конструктора, как правило, требует анализа большого количества вариантов, составляющих множество Парето, что может оказаться весьма трудоемким процессом. Данную проблему можно решить при помощи метода последовательной оптимизации [8], суть которого состоит в том, что объект оптимизации рассматривают в виде иерархической структуры, каждый уровень которой должен быть оптимизирован по своему набору критериев. Синтез параметров очередного уровня производят с учетом уже синтезированной по своему набору критериев подсистемы предыдущего уровня. ЭГСП можно представить в виде блочной структуры с двумя уровнями последовательной оптимизации (рис. 1).

Рис. 1. Блочная структура ЭГСП.
БУ – блок управления, ЭМП – электромеханический преобразователь, ГУ – предварительная ступень гидроусиления, ЗР – золотниковый распределитель (основная ступень усиления), ИМ – исполнительный механизм (гидроцилиндр), ДОС – датчик обратной связи, Ур. 1 – первый уровень иерархической структуры, Ур. 2 – второй уровень иерархической структуры, ![]() – сигнал управления,
– сигнал управления, ![]() – координата управляемого объекта
– координата управляемого объекта
Ниже предложен метод выбора параметров ЭГСП основанный на том, что конструктор, имея техническое задание, предварительно разрабатывает его принципиальную схему. Пример такой схемы представлен на рис. 2.
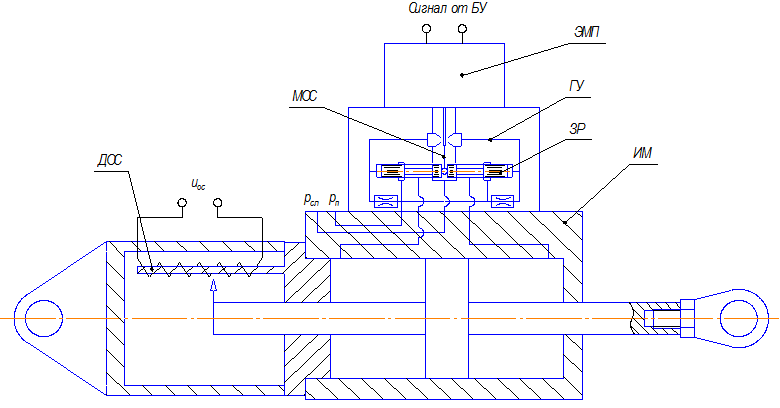
Рис. 2. Схема ЭГСП с ЭГУ типа «сопло-заслонка» с механической обратной связью по положению золотника (СЗ с МОС)
Процедура дальнейшего проектирования привода состоит из следующих этапов:
1) Составление математической модели привода и определение вектора варьируемых параметров.
2) Выбор критериев в виде вектора целевых функций ![]() и ограничений в виде
и ограничений в виде ![]() для минимизации отклонений характеристик проектируемого ЭГСП с различным сочетанием параметров от технического задания.
для минимизации отклонений характеристик проектируемого ЭГСП с различным сочетанием параметров от технического задания.
3) Как показывает практика [3], при условии, что частота пропускания ЭГУ ![]() (частота, при которой фазочастотная характеристика ЭГУ пересекает уровень -90°)в 3…5 раз больше собственной частоты ИМ
(частота, при которой фазочастотная характеристика ЭГУ пересекает уровень -90°)в 3…5 раз больше собственной частоты ИМ ![]() , можно рассматривать подсистему Ур. 2 в составе всего ЭГСП, как пропорциональное звено с коэффициентом передачи
, можно рассматривать подсистему Ур. 2 в составе всего ЭГСП, как пропорциональное звено с коэффициентом передачи ![]() :
:
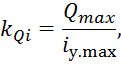
где ![]() – расход рабочей жидкости через окна ЗР при максимальном токе управления
– расход рабочей жидкости через окна ЗР при максимальном токе управления ![]() в обмотках ЭМП и отсутствии перепада давлений между полостями ИМ. Cхема подсистемы Ур. 1 представлена на рис. 3.
в обмотках ЭМП и отсутствии перепада давлений между полостями ИМ. Cхема подсистемы Ур. 1 представлена на рис. 3.
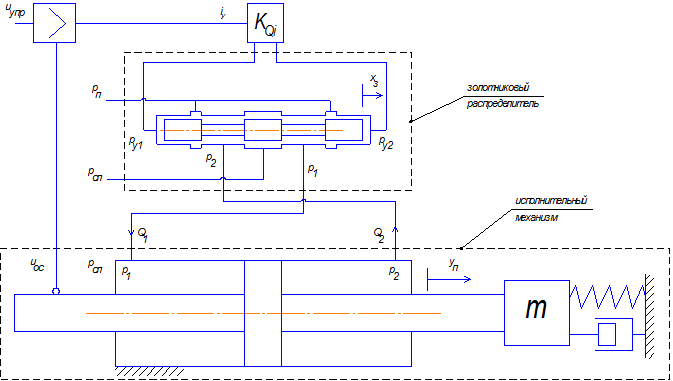
Рис. 3. Схема подсистемы Ур. 1.
На первом этапеоптимизации необходимо определить конструктивные параметры ИМ по критериям ![]() , рассматривая ЭГСП в целом с подсистемой Ур. 2 представленной пропорциональным звеном.
, рассматривая ЭГСП в целом с подсистемой Ур. 2 представленной пропорциональным звеном.
На втором этапе с помощью критериев ![]() , необходимо вычислить оптимальные значения параметров ГУ с ЭМП (подсистемы Ур. 2) при ограничении
, необходимо вычислить оптимальные значения параметров ГУ с ЭМП (подсистемы Ур. 2) при ограничении ![]() . Схема подсистемы Ур. 2 представлена на рис. 4.
. Схема подсистемы Ур. 2 представлена на рис. 4.
Рис. 4. Схема подсистемы Ур. 2. ![]() - давление питания гидромоста,
- давление питания гидромоста, ![]() - давление слива,
- давление слива, ![]() – давления, на торцах золотника
– давления, на торцах золотника
3 Математическая модель ЭГСП
На этапе синтеза базовых параметров ЭГСП для оценки его устойчивости и быстродействия можно использовать линеаризованную математическую модель [9]. Однако для более подробного исследования характеристик и выявления режимов работы спроектированного привода необходимо применять нелинейную математическую модель. Динамические характеристики реального ЭГСП могут отличаться от характеристик его линейной модели вследствие влияния ряда факторов:
– сухого трения в ЗР и ИМ, или в устройствах, нагружающих выходное звено ИМ;
– вида функции, описывающей расходно-перепадную характеристику ЗР, с разрывом в нуле.
С учетом изложенного выше, можно составить нелинейную математическую модель ЭГСП.
Варьируемыми параметрами для подсистемы Ур. 1 являются развиваемое ИМ усилие, максимальная скорость и максимальный ход выходного звена ИМ (из соображений обеспечения заданной выходной мощности ЭГСП).
Математическую модель гидроусилителя с предварительной ступенью усиления в виде сопла-заслонки и с упругим стержнем обратной связи (гидроусилитель с сервоуправлением) можно составить при помощи методик, изложенных в [9-12].
Варьируемыми параметрами подсистемы Ур. 2 для ЭГУ СЗ с МОС являются: ход и диаметр золотника, ширина окон ЗР, диаметры и длины сопл, зазор между соплом и заслонкой, геометрические параметры плечевого дросселя, а также допуски на параметры элементов гидромоста, длина и жесткость струны обратной связи и расположение оси сопел относительно центра вращения подвижной системы ЭМП, моментные характеристики ЭМП, параметры питания ЭМП.
4 Выбор критериев для оценки проектных вариантов ЭГСП
Для подсистемы Ур. 1.
1) Целесообразно прежде всего выделить критерии, характеризующие соотношение мощности и массы ИМ [13].
2) Затем определяются динамические показатели, выбираемые в соответствии с техническим заданием на ЭГСП. Для ЭГСП, используемых в авиационных системах управления, они представлены в виде [3], [14]:
– требований на величину резонансного пика на логарифмической частотной характеристике Lрез (как правило, не более 1…2 Дб), и частоту пропусканияωпп при логарифмическом значении амплитуд -3…-6 Дб для замкнутого контура привода;
– требований к фазочастотным характеристикам ЭГСП в виде ограничений на максимальный фазовый сдвиг перемещения выходного звена относительно входного сигнала в заданном диапазоне частот;
– требований к динамической жесткости привода [15]. Такие требования к ЭГСП предъявляются при необходимости демпфирования колебаний управляемого объекта в случае отсутствия специальных демпфирующих устройств. Динамическая жесткость определяется, как комплексное отношение возмущающей силы, действующей на выходное звено ЭГСП, к перемещению выходного звена, вызванному этим возмущением. Для обеспечения демпфирования управляемого объекта ЭГСП должен во всем диапазоне частот иметь фазо-частотную характеристику динамической жесткости максимально близкую к +90° и значение динамической жесткости не меньшую определенной в техническом задании.
В случае невозможности выполнения требований к динамическим характеристикам путем варьирования конструктивных параметров, целесообразно вводить в структуру привода корректирующие устройства [3].
3) Энергетические характеристики.
С точки зрения обеспечения оптимальных энергетических характеристик, следует отметить случай, когда требования к предельной механической характеристике привода заданы скоростью выходного звена привода ![]() при требуемой нагрузке
при требуемой нагрузке ![]() , а также минимальной
, а также минимальной ![]() и максимальной
и максимальной ![]() развиваемой приводом силы. При таком сочетании требований технического задания можно получить чрезмерно большой потребляемый расход в режиме холостого хода. Несложно показать, что минимальное значение потребляемого расхода может быть получено при соотношении
развиваемой приводом силы. При таком сочетании требований технического задания можно получить чрезмерно большой потребляемый расход в режиме холостого хода. Несложно показать, что минимальное значение потребляемого расхода может быть получено при соотношении ![]() . При этом развиваемое усилие может превысить
. При этом развиваемое усилие может превысить ![]() . В таком случае для обеспечения требований ТЗ в структуру привода для ограничения развиваемой силы необходимо вводить нелинейную обратную связь по перепаду давления в гидродвигателе, либо применять на выходном звене гидропружину.
. В таком случае для обеспечения требований ТЗ в структуру привода для ограничения развиваемой силы необходимо вводить нелинейную обратную связь по перепаду давления в гидродвигателе, либо применять на выходном звене гидропружину.
4) Массогабаритные характеристики. На этапе формирования требований к следящему приводу его габариты определяют следующие параметры: максимальная развиваемая приводом сила ![]() , максимальный ход выходного звена
, максимальный ход выходного звена ![]() , максимальная скорость выходного звена
, максимальная скорость выходного звена ![]() . Таким образом, максимальную мощность, потребляемую приводом (без учета КПД кинематической передачи от выходного звена привода к управляемому объекту), учитывая предельную механическую характеристику дроссельного гидропривода [9], можно оценить, как
. Таким образом, максимальную мощность, потребляемую приводом (без учета КПД кинематической передачи от выходного звена привода к управляемому объекту), учитывая предельную механическую характеристику дроссельного гидропривода [9], можно оценить, как
![]()
где ![]() и
и ![]() – давления питания и слива в гидросистеме,
– давления питания и слива в гидросистеме, ![]() – максимальный расход, потребляемый приводом.
– максимальный расход, потребляемый приводом.
Таким образом, можно однозначно определить типоразмер ЭГУ.
В свою очередь, параметры (габариты и масса) исполнительного гидроцилиндра зависят от выбора коэффициента передачи от выходного звена привода до управляемого объекта.
5) Надежность следящего привода. Требования по надежности, предъявляемые к ЭГСП, как к части системы управления объектом, являются определяющими при выборе степени резервирования всего привода или его частей. На этапе проектирования надежность структуры привода можно продемонстрировать расчетным методом на основе данных об эксплуатации агрегатов с аналогичными конструктивными решениями, работающих в похожих условиях эксплуатации [16]. Однако полученные в результате расчета показатели надежности можно использовать лишь в качестве грубой оценки, подтверждающей соответствие разработанного привода техническому заданию. Таким образом, показатели надежности, указанные в техническом задании на проектирование привода можно использовать лишь в качестве ограничений в задаче оптимизации параметров привода. Применение расчетных показателей надежности в качестве критериев для сравнения близких конструктивных решений нецелесообразно, но необходимо учитывать требования по резервированию привода для обеспечения надежности всей системы управления.
Для подсистемы Ур. 2 целесообразно выделить следующие критерии, определяющие качество конструктивного решения:
1) Динамические показатели.
Быстродействие ЭГУ можно оценить частотой входного сигнала при фазовом сдвиге выходного сигнала (перемещения золотника) относительно входного на 90°.
2) Энергетические характеристики. Расход утечки через предварительную ступень должен быть не более 2-3% максимального номинального расхода жидкости через золотниковый распределитель (основная ступень гидроусилителя), и для повышения энергетической эффективности гидроусилителя необходимо этот расход уменьшать.
3) Чувствительность ЭГУ к изменению внешних параметров. В процессе эксплуатации изменение таких параметров, как температуры рабочей жидкости и окружающей среды, давления питания и слива, напряжения питания датчиков и обмоток ЭГУ, может существенно менять характеристики привода – статические (максимальная скорость выходного звена, смещение нуля, зона нечувствительности) и динамические (ЛАХ и ФЧХ). Таким образом, одна из целей выбора оптимальных параметров подсистему Ур. 2 – минимизация чувствительности ЭГУ к изменению внешних параметров.
5 Решение задачи многокритериальной задачи
Как показано в ряде работ, для многокритериальной оптимизации ЭГСП целесообразно применять метод ЛПпоиска [4], [17], [18] или генетические алгоритмы [19].
Заключение.
Предлагаемый подход к оптимизации ЭГСП по многим критериям состоит из трех частей.
Первая часть – выбор конструктивной схемы привода в интерактивном режиме работы конструктора, который применяет на данном этапе в основном такие неформализуемые критерии, как опыт создания подобных изделий на близкие к техническому заданию требования.
Вторая часть – выбор параметров, обеспечивающих наименьшее расхождение между расчетными и требуемыми техническим заданием характеристиками при помощи концепции блочной оптимизации. В этой части целесообразно использовать генетические алгоритмы или метод ЛП-поиска.
Третья часть ориентирована на отбор из полученных во второй части решений наиболее подходящих для решения поставленной в техническом задании задачи.
Алгоритмы вычисления и исследования по каждой части будут приведены в следующих статьях.
Список литературы
1. Воронов Е.М. Многокритериальный синтез позиционного управления на основе многопрограммной стабилизации. Ч. 1 // Вестник МГТУ им. Н.Э. Баумана. Сер. Приборостроение. 2012. № 2 . С. 3-20.
2. Редько П.Г., Ермаков С.А., Константинов С.В. Электрогидравлические рулевые приводы систем управления полетом маневренных самолетов. М.: "Янус-К", 2006. 316 c.
3. Попов Д.Н., Асташев В.К., Густомясов А.Н. и др. Машиностроение: энциклопедия. В 40 т. Т. IV-2 : Электропривод. Гидро- и виброприводы. Кн. 2 : Гидро- и виброприводы / под ред. В.К. Асташева, Д.Н. Попова. М.: Машиностроение, 2012. 303 c.
4. Боровин Г.К., Попов Д.Н. Многокритериальная оптимизация гидросистем: учеб. пособие. М.: Изд-во МГТУ им. Н.Э. Баумана, 2007. 94 c.
5. Arora J.S., Marler R.T. Survey of multi-objective optimization methods for engineering // Struct. Multidisc. Optim. 2004. Vol. 26, no. 6. P. 369-395. DOI: 10.1007/s00158-003-0368-6
6. Подиновский В.В., Ногин В.О. Парето-оптимальные решения многокритериальных задач. М.: Физматлит, 2007. 256 с.
7. Карпенко А.П. Аппроксимация функции предпочтений лица, принимающего решения, в задаче многокритериальной оптимизации. 3. Методы на основе нейронных сетей и нечеткой логики // Наука и образование. МГТУ им. Н.Э. Баумана. Электрон. журн. 2008. № 4. Режим доступа: http://technomag.edu.ru/doc/86335.html (дата обращения 22.03.2013).
8. Колесников А.А. Последовательная оптимизация нелинейных агрегированных систем управления. М.: Энергоатомиздат, 1987. 160 c.
9. Попов Д.Н. Механика гидро- и пневмоприводов: учебник для машиностроительных вузов. 2-е изд. М.: Изд-во МГТУ им. Н.Э. Баумана, 2002. 320 c.
10. Бажин И.И., Беренгард Ю.Г., Гайцгори М.М., Ермаков С.А., Клапцова Т.С., Кудинов А.В., Чкалов В.В. Автоматизированное проектирование машиностроительного гидропривода / под общ. ред. С.А. Ермакова. М.: Машиностроение, 1988. 312 с.
11. Попов Д.Н., Ермаков С.А., Лобода И.Н. и др. Инженерные исследования гидроприводов летательных аппаратов / под ред. Д.Н. Попова. М.: Машиностроение, 1978. 142 c.
12. Фомичев В.М. Расчет характеристик электрогидравлических усилителей мощности с учетом температуры жидкости // Вестник машиностроения. 1973. № 10. С. 31-34.
13. Попов Д.Н. Оценка эффективности и оптимальное проектирование гидроприводов // Вестник машиностроения. 1986.№ 9. С. 20-23.
14. Редько П.Г. Повышение безотказности и улучшение характеристик электрогидравлических следящих приводов. М.: Янус-К; ИЦ МГТУ "Станкин", 2002. 232 c.
15. Склянский Ф.И., Шумилов И.С., Гониодский В.И.. М.: Машиностроение, 1974. 320 c.
16. Сырицын Т.А. Надежность гидро- и пневмопривода. М.: Машиностроение, 1981. 216 c.
17. Статников Р.Б., Соболь И.М. Выбор оптимальных параметров в задачах со многими критериями. 2-е изд., перераб. и доп. М.: Дрофа, 2006. 175 c.
18. Коркодинов Д.В, Попов Д.Н. Оптимальное проектирование следящего электрогидравлического привода с дроссельным регулированием // Гидравлические машины, гидроприводы и гидропневмоавтоматика: труды Всероссийской науч.-техн. конф. студентов и аспирантов (Москва, 9 декабря 2010 г.). М.: Издательский дом МЭИ, 2010. С. 124-128.
19. Andersson J., Krus P., Wallace D. Multi-objective optimization of hydraulic actuation systems // Proceedings of the ASME DT Conferences, DETC/DAC-14512, Baltimore, MD, 2000.
Публикации с ключевыми словами: многокритериальная оптимизация, гидропривод дроссельный, электрогидравлический следящий привод, ЭГСП
Публикации со словами: многокритериальная оптимизация, гидропривод дроссельный, электрогидравлический следящий привод, ЭГСП
Смотри также:
- Оптимизация электрогидравлического усилителя для следящего привода с дроссельным регулированием
- Исследование погрешности аппроксимации многомерной функции с помощью нейронных сетей с радиальными базисными функциями
- Информационная модель и основные функции программной системы многокритериальной оптимизации ╚Парето╩
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||