научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 11, ноябрь 2012
DOI: 10.7463/1112.0499873
УДК 621.37:621.391
Россия, МГТУ им. Н.Э. Баумана
shakhtarin@mail.ru
Введение
Проблема обеспечения посадки воздушных судов (самолетов) на необорудованные или малооборудованные посадочными средствами аэродромы и площадки давно привлекает внимание авиационных радиоинженеров. Решение этой проблемы позволило бы значительно расширить число взлетно-посадочных полос (ВПП), способных принимать воздушные суда в сложных метеоусловиях, и повысить эффективность и безопасность применения гражданской и военной авиации.
Для выполнения посадки при помощи бортовой РЛС от нее требуется [1]: а) обеспечить непрерывное получение параметров полета самолета и его положения относительно ВПП с необходимой точностью; б) организовать визуализацию текущего расположения воздушного судна относительно ВПП и вида ВПП с самолета в удобной для экипажа форме. Первая задача решается путем измерения дальности и пеленгации наземных радиолокационных ориентиров (маяков), расположенных на точно известных удалениях от ВПП дальномерно-угломерным методом [2]. Вторая задача в опытных работах выполнялась радиолокационным картографированием с самолета ВПП бортовой РЛС миллиметрового диапазона волн, обладающей повышенным азимутальным разрешением, позволяющим получить радиолокационное изображение района ВПП достаточной детальности [3]. До сих пор эти две задачи решались разрозненно, что не позволило решить проблему автоматического режима захода на посадку по данным бортовой РЛС в целом.
В настоящее время получили достаточно широкое распространение многофункциональные импульсно-доплеровские РЛС, способные выполнять как измерение координат наземных целей с необходимой точностью, так и формировать детальное изображение впереди лежащей местности методом синтезирования апертуры [4]. С появлением таких РЛС появилась возможность одновременно определять координаты и параметров полета, а также визуализацию процесса посадки в сложных метеоусловиях.
Применение импульсно-доплеровских РЛС при посадке имеет еще одно преимущество – наличие дополнительного информационного канала измерения доплеровской частоты отраженных сигналов, позволяющее повысить точность оценки параметров положения и курса самолета, реализуемую при использовании дальномерно-угломерного метода измерения, и дополнить перечень оцениваемых параметров углом сноса. Назовем, предлагаемый в данной статье, новый метод получения параметров полета и положения воздушного судна с измерением доплеровской частоты отраженных сигналов «дальномерно-доплеровским» или просто «доплеровским» методом. Поэтому целью работы является оценка ошибок определения координат воздушного судна при заходе его на посадку с помощью предлагаемого доплеровского метода.
1. Дальномерно-доплеровский метод измерения координат воздушного судна при заходе на посадку
Результаты анализа точности определения параметров полета и положения воздушного судна при движении по глиссаде доплеровским методом и их сравнение с результатами, полученными дальномерно-угломерным методом, получены путем цифро-имитационного моделирования процесса посадки при помощи бортовой РЛС.
Цифро-имитационная модель включала в себя модель траектории (глиссады) снижения, модель радиолокационных измерений маяков и модель алгоритмов оценивания координат воздушного судна в процессе снижения по глиссаде.
В качестве глиссады была принята прямая с углом наклона 3º, лежащая в вертикальной плоскости, проходящей через ось ВПП, расположенной в горизонтальной плоскости. Длина ВПП после точки приземления принималась равной 2 км. Схематическое изображение глиссады, ВПП, расставленных возле ВПП маяков и используемой декартовой системы координат приведено на рис. 1. Горизонтальная дальность от точки входа в глиссаду до точки приземления принималась равной 4 км. Расчеты по оценке координат маяков при снижении производились в 38 равноотстоящих точках глиссады от точки входа в глиссаду до наклонной дальности 200-250 м, когда обеспечивается прием отраженных сигналов от всех маяков в пределах зоны сканирования диаграммы направленности антенны бортовой РЛС.

Рис. 1. Относительное расположение ВПП, глиссады снижения и радиолокационных маяков-отражателей (Дпор – дальность от начала ВПП до точки приземления)
Модель расстановки маяков представляла собой наборы декартовых координат ![]() маяков (i =1..N– номер маяка, N – количество маяков). Расстановка маяков, схема которой представлена на рис. 2, выбрана с учетом получения наилучших точностей для дальномерно-угломерного метода.
маяков (i =1..N– номер маяка, N – количество маяков). Расстановка маяков, схема которой представлена на рис. 2, выбрана с учетом получения наилучших точностей для дальномерно-угломерного метода.
Модель радиолокационных измерений представляла собой наборы величин координат маяков относительно самолета XДУ=![]() , измеренных дальномерно-угломерным методом, и XДД=
, измеренных дальномерно-угломерным методом, и XДД=![]() , измеренных дальномерно-доплеровским методом в каждой из равноотстоящих точек модели глиссады. В этих выражениях: Ri – наклонная дальность,
, измеренных дальномерно-доплеровским методом в каждой из равноотстоящих точек модели глиссады. В этих выражениях: Ri – наклонная дальность, ![]() – азимут и
– азимут и ![]() – угол места i-го маяка относительно БРЛС,
– угол места i-го маяка относительно БРЛС, ![]() – доплеровская частота сигнала отражений от i-го маяка. Величины, измеренные бортовой РЛС, моделировались в виде аддитивной суммы истинных значений соответствующих величин и случайной гауссовской составляющей. СКО гауссовских шумов измерений
– доплеровская частота сигнала отражений от i-го маяка. Величины, измеренные бортовой РЛС, моделировались в виде аддитивной суммы истинных значений соответствующих величин и случайной гауссовской составляющей. СКО гауссовских шумов измерений ![]() принимались равными:
принимались равными: ![]() = 10 м,
= 10 м, ![]() = 20 угл.мин, а СКО измерения доплеровской частоты
= 20 угл.мин, а СКО измерения доплеровской частоты ![]() принималось равным
принималось равным ![]() 1 и 5 Гц, т.е. близким к ожидаемым параметрам режима работы РЛС с синтезированием апертуры.
1 и 5 Гц, т.е. близким к ожидаемым параметрам режима работы РЛС с синтезированием апертуры.

Рис. 2. Расстановка маяков для посадки самолета
Оценка точности определения координат ![]() и параметров полета (
и параметров полета (![]() – курс полета относительно ВПП и
– курс полета относительно ВПП и ![]() – угол сноса) при снижении по глиссаде проводилась путем сравнения истинных и оценочных значений указанных параметров. Для формирования указанных параметров на ЭВМ решались системы переопределенных (число неизвестных величин меньше числа уравнения) нелинейных алгебраических уравнений, которые связывают вектор XДУ=
– угол сноса) при снижении по глиссаде проводилась путем сравнения истинных и оценочных значений указанных параметров. Для формирования указанных параметров на ЭВМ решались системы переопределенных (число неизвестных величин меньше числа уравнения) нелинейных алгебраических уравнений, которые связывают вектор XДУ=![]() или вектор XДД=
или вектор XДД=![]() с координатами и параметрами полета самолета. Эти уравнения получены на основе геометрических соотношений рис.1 и имеют вид:
с координатами и параметрами полета самолета. Эти уравнения получены на основе геометрических соотношений рис.1 и имеют вид:

Причем для формирования истинных значений использовались точные величины ![]() , а для оценочных значений использовались величины, измеренные РЛС или истинные значения с ошибками.
, а для оценочных значений использовались величины, измеренные РЛС или истинные значения с ошибками.
2. Основные характеристики метода
На рис. 4 и 5 приведены некоторые результаты оценки точности измерения местоположения и параметров полета воздушного судна относительно ВПП полученные при моделировании для дальномерно-угломерного и доплеровского методов измерений. Методика оценки точности содержится в [7].
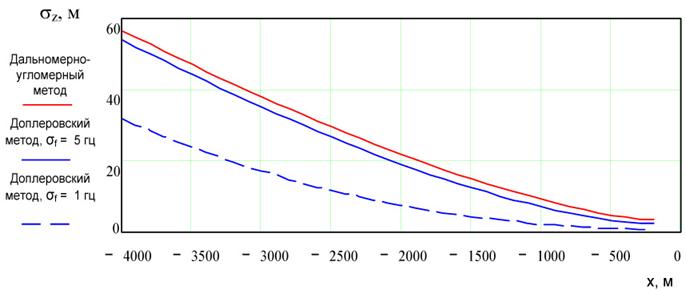
Рис. 4. Зависимость СКО оценки бокового отклонения от конечной точки глиссады
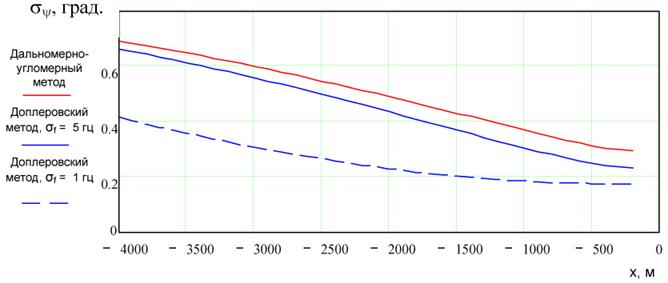
Рис. 5. Зависимость СКО оценки курса самолета
Из представленных зависимостей можно убедиться, что применение доплеровского метода (дополнительное измерение доплеровской частоты сигналов радиомаяка) повышает точности измерения координат и параметров полета воздушного судна на протяжении всей глиссады снижения. Например, на дальности 4000 м СКО ошибок бокового отклонения снижается с 60 м до 35 м (рис. 4), а курса самолета ― с 0,7 до 0,4 градуса (рис. 5). Особенно заметно повышение точности при малых ошибках в измерении доплеровской частоты (σf = 1 Гц)
Представляет интерес оценка метеоминимума, обеспечиваемая исследуемыми методами и алгоритмами оценки координат и параметров полета при помощи БРЛС.
Посадка на аэродромы, оборудованные курсоглиссадной системой, осуществляется по формируемым этой системой сигналам отклонения от глиссады ![]() . Сигналы
. Сигналы ![]() могут быть сформированы из координат самолета, полученных описанными выше методами пеленгации радиолокационных маяков – отражателей, по формулам
могут быть сформированы из координат самолета, полученных описанными выше методами пеленгации радиолокационных маяков – отражателей, по формулам
 ,
,  ,
,
где ![]() – заданный курс снижения.
– заданный курс снижения.
Для оценки метеоминимума, достигаемого при помощи измерения координат маяков, установленных в районе ВПП, будем исходить из требований ICAO к точности курсовых и глиссадных радиомаяков радиомаячных курсоглиссадных систем.
Согласно этим требованиям [5] допустимое отклонение, задаваемой курсовым радиомаяком, плоскости курса от оси ВПП над опорной точкой, находящейся в начале ВПП, не должно превышать ± 10,5 м и ± 5 м для систем соответственно категорий I, II. Принимая во внимание, что начало ВПП отстоит от конечной точки глиссады на величину Дпор = 300 м (рис. 1) и, сопоставляя эти требования с величинами ошибок ![]() для этого удаления, можно сделать вывод, что обеспечиваемая РЛС точность определения координат самолета над опорной точкой глиссады в боковом канале удовлетворяет требованиям всех категорий ICAO. Сопоставление боковых ошибок σz, полученных для удалений 1 км (σz < 4 м) и 3 км (σz = 16÷38 м), с величинами предельно допустимых отклонений ВС по курсу на этих удалениях (± 40 и ± 100 м, соответственно) позволяет сделать вывод, что полученные бортовой РЛС точности достаточны для удержания самолета в пределах требуемого курсового коридора.
для этого удаления, можно сделать вывод, что обеспечиваемая РЛС точность определения координат самолета над опорной точкой глиссады в боковом канале удовлетворяет требованиям всех категорий ICAO. Сопоставление боковых ошибок σz, полученных для удалений 1 км (σz < 4 м) и 3 км (σz = 16÷38 м), с величинами предельно допустимых отклонений ВС по курсу на этих удалениях (± 40 и ± 100 м, соответственно) позволяет сделать вывод, что полученные бортовой РЛС точности достаточны для удержания самолета в пределах требуемого курсового коридора.
Для глиссадного маяка, с углом наклона глиссады 3°, согласно [5, 6] отклонение линии глиссады от среднего значения не должно превышать ± 14,5' (0,22º) для систем I…II категорий и ± 7' (0,12º) для систем категории IIIсоответственно.
Заключение
Сопоставляя ошибки измерения координат самолета доплеровским методом с допустимыми ошибками,можно сделать вывод, что до удаления 1 км от конечной точки глиссады обеспечиваемая бортовой РЛС точность оценки координат самолета удовлетворяет требованиям категорий I и IIICAO. Однако на дальности 1 км, при угле наклона глиссады 3°, ошибка измерения высоты полета составляет 52 м, что превышает высоту принятия решения категории II (30 м). Таким образом, обеспечиваемая бортовой РЛС точность оценки отклонения самолета от глисады снижения в вертикальном канале удовлетворяет требованиям категории IICAO и несколько уступает требованиям категории IIICAO и, по всей видимости, при дальнейшем снижении потребуется использование на борту самолета точного высотомера, например, радиовысотомера малых высот.
Список литературы
1. Черный М.А., Кораблин В.И. Воздушная навигация. 4-е изд. М.: Транспорт, 2011. 373 с.
2. Авиационные правила. Часть 139. Сертификация аэродромов. Том ΙΙ. Сертификационные требования к аэродромам / Межгосударственный авиационный комитет. 2006. 64 с.
3. Ещенко С.Д., Сухарев О.А. Александров В.К. Результаты лётных испытаний бортовой радиолокационной станции визуализации ВПП «Видимость» на самолётах-лабораториях Ил-18 и Ан-24 / Концерн «Ленинец». Санкт-Петербург, 2008. 24 с.
4. Кондратенков Г.С., Фролов А.Ю. Теоретические основы построения радиолокационных систем дистанционного зондирования Земли. М.: ВВИА им. проф. Н.Е. Жуковского, 2009. 360 с.
5. Указание Департамента воздушного транспорта Минтранса РФ от 27.03.2012 г. «Методика определения минимумов для взлёта и посадки воздушных судов гражданской авиации». 128 c.
6. Doc. 9650 // Особое специализированное совещание по связи и производству полетов (SPCOM/JPS/05) : доклады. (Монреаль, 27 марта – 7 апреля 2005 года). ICAO, 2005.
7. Орлов А.И. Организационно-экономическое моделирование. Ч. 3. Статистические методы анализа данных. М.: Издательство МГТУ им. Н.Э. Баумана, 2012 . 623 с.
Публикации с ключевыми словами: доплеровская частота, посадка воздушного судна, задержка сигнала, пассивные маяки, РЛС с синтезируемой апертурой, бортовая РЛС
Публикации со словами: доплеровская частота, посадка воздушного судна, задержка сигнала, пассивные маяки, РЛС с синтезируемой апертурой, бортовая РЛС
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||