научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 05, май 2011
DOI: 10.7463/0511.0185335
МГТУ им. Н.Э. Бумана
Во многих приложениях, в которых модели исследуемых объектов представляют в виде обыкновенных дифференциальных уравнений (ОДУ), возникает задача построения области достижимости соответствующей динамической системы. Например, такая задача возникает при решении проблемы траекторной безопасности летального аппарата [1], при решении близкой задачи о посадке вертолета на подвижный носитель [2]. Важной особенностью задачи построения области достижимости является то, что ее часто приходится решать в режиме реального времени. При этом основные вычислительные затраты обусловлены затратами на интегрирование указанной системы ОДУ. Таким образом, актуальной является задача быстрого интегрирования модельной системы ОДУ.
Известно несколько подходов к построению области достижимости динамической системы. Прежде всего, возможно точное аналитическое построение этой области. Однако такой подход возможен лишь в простейших случаях, не представляющих практического интереса. Поэтому для построения этой области обычно приходится использовать приближенные численные методы. Среди этих методов выделим
· метод мультифиниша,
· нейросетевые методы.
Основная идея метода мультифиниша состоит в многократном численном интегрировании модельной системы ОДУ при различных начальных условиях [3]. Метод хорошо распараллеливается, как для MIMD, так и для SIMDмногопроцессорных вычислительных систем с распределенной памятью [4, 5]. Можно предложить значительное число вариантов метода мультифиниша. Так возможна комбинация этого метода с методом аппроксимации векторного поля модельной системы ОДУ. Именно такая комбинация рассматривается в данной работе.
Суть указанной комбинации заключается в предварительной аппроксимация правых частей модельной системы ОДУ. При этом может быть использованы рассматриваемые в работе локальные кусочно-постоянная и кусочно-линейная интерполяции, глобальная полиномиальная аппроксимация, а также другие способы аппроксимации (например, аппроксимация с помощью нейронных сетей [6]). Ускорение вычислений при комбинации метода мультифиниша с методом аппроксимации векторного поля достигается за счет сокращения затрат на вычисление значений правых частей модельной системы ОДУ.
В первом разделе работы приводится постановка задачи. Второй раздел посвящен изложению общей схемы комбинации методов мультфиниша и аппроксимации векторного поля. Третий раздел содержит описание двух моделей движения летательных аппаратов, которые далее используются для оценки эффективности указанной комбинации методов. Первая из моделей описывается системой ОДУ шестого порядка, а вторая модель – аналогичной моделью седьмого порядка. Разделы с четвертый по шестой посвящены оценки эффективности комбинации методов мультифиниша и аппроксимации векторного поля при построении области достижимости летательного аппарата (ОДЛА) с использованием первой из указанных его моделей. В этих разделах поочередно рассматривается локальная кусочно-постоянная интерполяция, локальная кусочно-линейная интерполяция и глобальная полиномиальная аппроксимация. Аналогично, седьмой раздел посвящен оценке эффективности рассматриваемой комбинации методов при построении ОДЛА с использованием второй из указанных выше моделей летательного аппарата. В этом случае используется только глобальная полиномиальная аппроксимация. В заключении сформулированы основные результаты работы и очерчены перспективы ее развития.
Рассмотрим динамическую систему
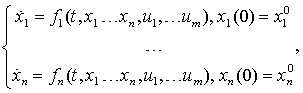 (1)
(1)
где ![]() – n-мерный вектор фазовых переменных системы,
– n-мерный вектор фазовых переменных системы, ![]() – m-мерный вектор управлений;
– m-мерный вектор управлений; ![]() – n-мерный вектор начальных условий,
– n-мерный вектор начальных условий, ![]() На вектор фазовых переменных
На вектор фазовых переменных ![]() и вектор управления
и вектор управления ![]() , вообще говоря, наложены ограничения
, вообще говоря, наложены ограничения
![]() (2)
(2)
где ![]() – некоторое пространство m-мерных функций, определенных на интервале
– некоторое пространство m-мерных функций, определенных на интервале ![]() , например, пространство функций, интегрируемых с квадратом на этом интервале.
, например, пространство функций, интегрируемых с квадратом на этом интервале.
Для компактности записи используем векторную форму системы (1)
![]() (3)
(3)
где ![]() – n-мерная вектор-функция.
– n-мерная вектор-функция.
Среди фазовых переменных ![]() выделим
выделим ![]() переменных. Не ограничивая общности, положим, что эти переменные образуют
переменных. Не ограничивая общности, положим, что эти переменные образуют ![]() -мерный вектор
-мерный вектор
![]()
Областью достижимости ![]() системы (3) назовем множество всех возможных значений вектора
системы (3) назовем множество всех возможных значений вектора ![]() , которые принимаются на решениях этой системы при начальных условиях
, которые принимаются на решениях этой системы при начальных условиях ![]() и ограничениях (2).
и ограничениях (2).
Ставим следующую задачу: при заданном векторе начальных условий ![]() и конечном времени T построить область достижимости
и конечном времени T построить область достижимости ![]() системы (3).
системы (3).
Для решения поставленной задачи, очевидно, достаточно построить границу ![]() области достижимости
области достижимости ![]() . В некоторых случаях удается найти множество допустимых управлений
. В некоторых случаях удается найти множество допустимых управлений ![]() , принадлежащих классу управлений
, принадлежащих классу управлений ![]() , которые приводят систему (3) на эту границу [1]. В этом случае поставленная задача сводится к построению границы
, которые приводят систему (3) на эту границу [1]. В этом случае поставленная задача сводится к построению границы ![]() .
.
2. Методы мультфиниша и аппроксимации векторного поля
Покроем множество ![]() некоторой сеткой
некоторой сеткой ![]() с узлами
с узлами ![]() ,
, ![]() , где
, где ![]() – общее число узлов сетки. Поставим в соответствие системе (3) совокупность
– общее число узлов сетки. Поставим в соответствие системе (3) совокупность ![]() систем ОДУ с управлениями
систем ОДУ с управлениями ![]()
 (4)
(4)
Тогда схему приближенного построения множества достижимости динамической системы методом мультифиниша можно представить в следующем виде [3].
1) Путем интегрирования совокупности систем ОДУ (4) находим множество точек ![]() , представляющее собой дискретную аппроксимацию области
, представляющее собой дискретную аппроксимацию области ![]() .
.
2) Сохраняем полученные наборы значений ![]() , в память используемой ЭВМ.
, в память используемой ЭВМ.
3) Во множестве ![]() находим граничные точки
находим граничные точки ![]() , представляющие собой дискретную аппроксимацию границы
, представляющие собой дискретную аппроксимацию границы ![]() области достижимости;
области достижимости; ![]() - число граничных точек.
- число граничных точек.
4) Сохраняем в памяти ЭВМ соответствующие наборы значений ![]() .
.
5) На основе множества граничных точек ![]() строим подходящую непрерывную аппроксимацию
строим подходящую непрерывную аппроксимацию ![]() границы
границы ![]() .
.
Задача построения дискретной или непрерывной аппроксимации границы ![]() представляет собой классическую задачу вычислительной геометрии – задачу построения оболочки облака точек. Методы решения этой задачи хорошо разработаны, известно значительное число программных систем, реализующих такие методы [7, 8].
представляет собой классическую задачу вычислительной геометрии – задачу построения оболочки облака точек. Методы решения этой задачи хорошо разработаны, известно значительное число программных систем, реализующих такие методы [7, 8].
Общая схема комбинации метода мультифиниша с методом аппроксимации векторного поля имеет следующий вид.
1) Предварительно множество ![]() покрываем некоторой сеткой
покрываем некоторой сеткой ![]() с узлами
с узлами ![]() ;
; ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() . Здесь
. Здесь ![]() – числа точек указанной сетки по времени, переменным состояния и компонентам вектора управления соответственно.
– числа точек указанной сетки по времени, переменным состояния и компонентам вектора управления соответственно.
2) Предварительно во всех узлах указанной сетки вычисляем значения функции ![]() и запоминаем эти значения.
и запоминаем эти значения.
3) Тем или иным методом численно интегрируем систему ОДУ (4), используя в качестве требуемых значений функции ![]() соответствующие интерполяции или аппроксимации запомненных значений этой функции.
соответствующие интерполяции или аппроксимации запомненных значений этой функции.
Замечание. Выше полагается, что числа узлов в сетке ![]() по каждой переменной состояния системы (3) равны между собой (и равны величине
по каждой переменной состояния системы (3) равны между собой (и равны величине ![]() ). Данное соглашение принято только для обеспечения простоты записи и не является принципиальным. Схему комбинации метода мультифиниша с методом аппроксимации векторного поля легко переписать без использования этого ограничения. Аналогичное замечание относится также к числам узлов в сетке
). Данное соглашение принято только для обеспечения простоты записи и не является принципиальным. Схему комбинации метода мультифиниша с методом аппроксимации векторного поля легко переписать без использования этого ограничения. Аналогичное замечание относится также к числам узлов в сетке ![]() по компонентам вектора управления системы (3).
по компонентам вектора управления системы (3).
Ускорение вычислений в данной комбинации методов достигается за счет того, что этапы 1, 2 выполняются предварительно, а при выполнении этапа 3 не требуется вычислять значения правых частей системы ОДУ (4).
В простейшем случае в качестве значения ![]() используется значение этой функции в ближайшем узле сетки
используется значение этой функции в ближайшем узле сетки ![]() , т.е. локальная кусочно-постоянная интерполяция указанной функции.
, т.е. локальная кусочно-постоянная интерполяция указанной функции.
При том же числе узлов сетки ![]() большую точность вычислений можно, очевидно, обеспечить путем использования локальной линейной интерполяции функции
большую точность вычислений можно, очевидно, обеспечить путем использования локальной линейной интерполяции функции ![]() на узлах этой сетки. При этом рассмотренная выше схема комбинации методов несколько меняется. Дело в том, что построение интерполирующей функции, даже в том случае, когда она является линейной, требует значительных вычислительных затрат. Поэтому в этом случае целесообразно хранить в памяти ЭВМ не значения функции
на узлах этой сетки. При этом рассмотренная выше схема комбинации методов несколько меняется. Дело в том, что построение интерполирующей функции, даже в том случае, когда она является линейной, требует значительных вычислительных затрат. Поэтому в этом случае целесообразно хранить в памяти ЭВМ не значения функции ![]() в узлах сетки
в узлах сетки ![]() , а заранее строить интерполирующие функции для каждой из ячеек этой сетки и хранить коэффициенты этих функций [3]. Возможна, очевидно, также локальная или глобальная аппроксимация функции
, а заранее строить интерполирующие функции для каждой из ячеек этой сетки и хранить коэффициенты этих функций [3]. Возможна, очевидно, также локальная или глобальная аппроксимация функции ![]() на сетке
на сетке ![]() полиномами с помощью метода наименьших квадратов.
полиномами с помощью метода наименьших квадратов.
Эффективность рассматриваемой комбинации методов приближенного построения области достижимости будем оценивать с помощью следующих величин.
1) Относительная ошибка аппроксимации
![]() , (5)
, (5)
где ![]() ,
, ![]() – рассматриваемая функция переменных состояния системы ОДУ (3), соответствующих точным и аппроксимированным правым частям этой системы.
– рассматриваемая функция переменных состояния системы ОДУ (3), соответствующих точным и аппроксимированным правым частям этой системы.
2) Оценка математического ожидания величины ![]()
![]() , (6)
, (6)
где ![]() – относительная ошибка по переменной w, соответствующая i-му узлу сетки метода мультифиниша; M– общее число таких узлов.
– относительная ошибка по переменной w, соответствующая i-му узлу сетки метода мультифиниша; M– общее число таких узлов.
3) Аналогичная оценка дисперсии величины ![]()
![]() . (7)
. (7)
3. Используемые модели летательного аппарата
Модель 1 (система ОДУ шестого порядка). Уравнения движения центра масс летательного аппарата в нормальной земной системе координат ![]() описываются системой ОДУ
описываются системой ОДУ
 (8)
(8)
где ![]() – скорость летательного аппарата,
– скорость летательного аппарата, ![]() – угол наклона траектории,
– угол наклона траектории, ![]() – угол поворота траектории,
– угол поворота траектории, ![]() – высота летательного аппарата,
– высота летательного аппарата, ![]() – тангенциальная перегрузка,
– тангенциальная перегрузка, ![]() – нормальная перегрузка,
– нормальная перегрузка, ![]() – скоростной угол крена,
– скоростной угол крена, ![]() – ускорение свободного падения [1].
– ускорение свободного падения [1].
Управлениями летательного аппарата являются тангенциальная перегрузка, нормальная перегрузка и скоростной угол крена, так что ![]() . На управления наложены ограничения
. На управления наложены ограничения
![]()
![]() ,
, ![]() ;
;
![]()
В работе [1] показано, что дальняя, ближняя и боковая границы области достижимости системы (8) формируются управлениями, принадлежащими классу кусочно-постоянных управлений, которым соответствуют «плоские» траектории летательного аппарата. Это обстоятельство позволяет, не ограничивая общности, рассматривать только ситуацию ![]()
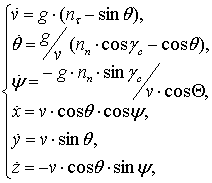
Модель 2 (система ОДУ седьмого порядка). Уравнения движения центра масс летательного аппарата в нормальной земной системе координат ![]() в этом случае имеют вид системы ОДУ
в этом случае имеют вид системы ОДУ
 (9)
(9)
где обозначения совпадают с обозначениями, веденными для модели 1; ![]() – заданный угол крена летательного аппарата;
– заданный угол крена летательного аппарата;
![]() ;
; ![]() ;
; ![]() ;
;
![]() ,
, ![]() .
.
При «плоском» движении летательного аппарата, описываемого системой ОДУ (9), его дальняя, ближняя и боковая границы области достижимости также формируют управления, принадлежащие классу кусочно-постоянных управлений.
Для обеих моделей ограничимся рассмотрением дальней границы ОДЛА. Структура управлений, формирующих эту границу, представлена на рисунке 1 [1].

Рисунок 1 – Структура управлений, формирующих дальнюю границу ОДЛА
Положим, что ![]() ,
, ![]() , где
, где ![]() ,
, ![]() - «точное» и приближенное расстояния от начала координат системы координат
- «точное» и приближенное расстояния от начала координат системы координат ![]() до центра масс летательного аппарата. Другими словами, рассмотрим следующие относительные ошибки аппроксимации (5):
до центра масс летательного аппарата. Другими словами, рассмотрим следующие относительные ошибки аппроксимации (5): ![]() – ошибка длинны радиус-вектора, проведенного из начального положения летательного аппарата в его положение на дальней границе ОДЛА;
– ошибка длинны радиус-вектора, проведенного из начального положения летательного аппарата в его положение на дальней границе ОДЛА; ![]() – относительная ошибка скорости
– относительная ошибка скорости ![]() ;
; ![]() – относительная угла
– относительная угла ![]() ;
; ![]() ,
, ![]() – относительные ошибки координат
– относительные ошибки координат ![]() ,
, ![]() . Рассмотрим также имеющие аналогичный смысл оценки математического ожидания и дисперсии величин
. Рассмотрим также имеющие аналогичный смысл оценки математического ожидания и дисперсии величин ![]()
![]() .
.
4. Модель 1. Локальная кусочно-постоянная интерполяция
Сетка ![]() . Прежде используем интерполяцию функции
. Прежде используем интерполяцию функции ![]() на равномерной по каждому из измерений сетке
на равномерной по каждому из измерений сетке
![]() ,
, ![]() ,
, ![]() . (10)
. (10)
Здесь и далее, когда речь идет о модели 1, принято ![]() ,
, ![]() . Таким образом, в данном случае
. Таким образом, в данном случае ![]() ,
, ![]() . Заметим, что сетка
. Заметим, что сетка ![]() требует объем памяти, равный
требует объем памяти, равный ![]() МБ, для хранения в памяти ЭВМ значений функции
МБ, для хранения в памяти ЭВМ значений функции ![]() .
.
При приближенном построении дальней границы ОДЛА системы (8) используем в процессе интегрирования этой системы в качестве значений функции ![]() ее значения в ближайших узлах сетки
ее значения в ближайших узлах сетки ![]() , т.е. используем кусочно-постоянную интерполяцию функции
, т.е. используем кусочно-постоянную интерполяцию функции ![]() .
.
Полученное приближение дальней границы ОДЛА иллюстрирует рисунок 2. Здесь и далее на аналогичных рисунках для сравнения показана также «точная» дальняя граница ОДЛА, полученная прямым интегрированием рассматриваемой системы ОДУ.

Рисунок 2 – Дальняя граница ОДЛА: модель 1; кусочно-постоянная интерполяция; сетка ![]()
Зависимость величин ![]() от угла места
от угла места ![]() летательного аппарата иллюстрируют рисунки 3, 4.
летательного аппарата иллюстрируют рисунки 3, 4.
Рисунок 3 показывает, что зависимость ![]() имеет немонотонный характер. Результаты исследования показывают, что максимальное значение ошибки
имеет немонотонный характер. Результаты исследования показывают, что максимальное значение ошибки ![]() достаточно велико и равно 0,11. Рисунок 4 демонстрирует также немонотонный характер зависимостей
достаточно велико и равно 0,11. Рисунок 4 демонстрирует также немонотонный характер зависимостей ![]() ,
, ![]() ,
, ![]() ,
, ![]() . Отметим, что здесь и далее большие значения ошибки
. Отметим, что здесь и далее большие значения ошибки ![]() обусловлены быстрым (гиперболическим) изменением значений правой части второго уравнения системы (8) вблизи точки
обусловлены быстрым (гиперболическим) изменением значений правой части второго уравнения системы (8) вблизи точки ![]() .
.
Соответствующие оценки математического ожидания и дисперсии определяется выражениями

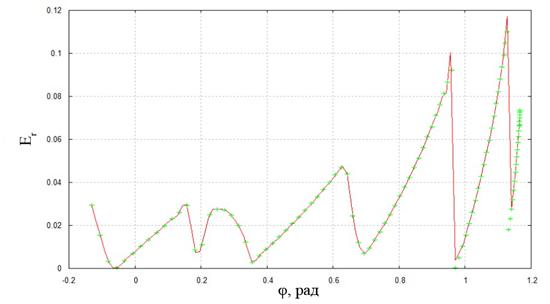
Рисунок 3 – Ошибка ![]() для дальней границы ОДЛА:
для дальней границы ОДЛА:
модель 1; кусочно-постоянная интерполяция; сетка ![]()

Рисунок 4 – Относительные ошибки ![]() ,
, ![]() ,
, ![]() ,
, ![]() :
:
модель 1; кусочно-постоянная интерполяция; сетка ![]()
Сетка ![]() . Используем теперь для локальной кусочно-постоянной интерполяции правых частей системы ОДУ (8) сетку
. Используем теперь для локальной кусочно-постоянной интерполяции правых частей системы ОДУ (8) сетку
![]() ,
, ![]() ,
, ![]() . (11)
. (11)
Объем необходимой памяти ЭВМ при этом равен ![]() МБ.
МБ.
Эффективность кусочно-постоянной интерполяция правых частей системы ОДУ (5) в данном случае иллюстрируют рисунки 5 – 7.
Результаты исследования показывают, что максимальное значение ошибки ![]() на сетке
на сетке ![]() вполне удовлетворительно и равно
вполне удовлетворительно и равно ![]() . Оценки математического ожидания и дисперсии ошибок
. Оценки математического ожидания и дисперсии ошибок ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() для этой сетки определяются выражениями
для этой сетки определяются выражениями


Рисунок 5 – Дальняя граница ОДЛА:
модель 1; кусочно-постоянная интерполяция; сетка ![]()

Рисунок 6 – Ошибка ![]() для дальней границы ОДЛА:
для дальней границы ОДЛА:
модель 1; кусочно-постоянная интерполяция; сетка ![]()

Рисунок 7 – Относительные ошибки ![]() ,
, ![]() ,
, ![]() ,
, ![]() :
:
модель 1; кусочно-постоянная интерполяция; сетка ![]()
Сетка ![]() . Наконец, используем сетку
. Наконец, используем сетку
![]() ,
, ![]() ,
, ![]() , (12)
, (12)
которой соответствует объем необходимой памяти ЭВМ ![]() МБ.
МБ.
Эффективность кусочно-постоянной интерполяция правых частей системы ОДУ (8) на указанной сетке иллюстрируют рисунки 8 – 10.

Рисунок 8 – Дальняя граница ОДЛА:
модель 1; кусочно-постоянная интерполяция; сетка ![]()
Из результатов исследования вытекает, что максимальное значение ошибки ![]() на сетке
на сетке ![]() примерно в два раза меньше такой же ошибки на сетке
примерно в два раза меньше такой же ошибки на сетке ![]() и составляет
и составляет ![]() . Оценки математического ожидания и дисперсии ошибок
. Оценки математического ожидания и дисперсии ошибок ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() на сетке
на сетке ![]() определяются выражениями
определяются выражениями
Интегральные результаты исследования эффективности кусочно-постоянной интерполяции правых частей системы (8) представлены на рисунке 11. Рисунок показывает, что в логарифмическом масштабе максимальная относительная величина ошибки ![]() , оценка математического ожидания этой ошибки
, оценка математического ожидания этой ошибки ![]() , а также оценка ее дисперсии
, а также оценка ее дисперсии ![]() практически линейно убывают с ростом суммарного числа узлов используемой сетки
практически линейно убывают с ростом суммарного числа узлов используемой сетки ![]() .
.

Рисунок 9 – Относительная ошибка ![]() :
:
модель 1; кусочно-постоянная интерполяция; сетка ![]()

Рисунок 10 – Относительные ошибки ![]() ,
, ![]() ,
, ![]() ,
, ![]() :
:
модель 1; кусочно-постоянная интерполяция; сетка ![]()

Рисунок 11 – Интегральные результаты:
модель 1; локальная кусочно-постоянная интерполяция
5. Модель 1. Локальная кусочно-линейная интерполяция
Используем поочередно сетки ![]() ,
, ![]() ,
, ![]() и локальную кусочно-линейную интерполяцию правых частей системы ОДУ (8) на этих сетках.
и локальную кусочно-линейную интерполяцию правых частей системы ОДУ (8) на этих сетках.
Сетка ![]() . Эффективность кусочно-линейной интерполяция правых частей системы ОДУ (8) на этой сетке иллюстрируют рисунки 12 – 14.
. Эффективность кусочно-линейной интерполяция правых частей системы ОДУ (8) на этой сетке иллюстрируют рисунки 12 – 14.

Рисунок 12 – Дальняя граница ОДЛА:
модель 1; кусочно-линейная интерполяция; сетка ![]()
Из результатов исследования вытекает, что максимальное значение ошибки ![]() в данном случае составляет
в данном случае составляет ![]() . Оценки математического ожидания и дисперсии ошибок
. Оценки математического ожидания и дисперсии ошибок ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() на сетке
на сетке ![]() равны
равны

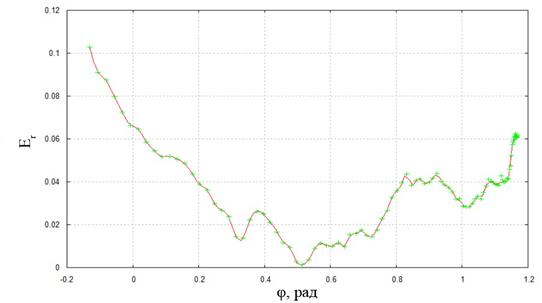
Рисунок 13 – Относительная ошибка ![]() :
:
модель 1; кусочно-линейная интерполяция; сетка ![]()

Рисунок 14 – Относительные ошибки ![]() ,
, ![]() ,
, ![]() ,
, ![]() :
:
модель 1; кусочно-линейная интерполяция; сетка ![]()
Сетка ![]() . Перейдем к рассмотрению эффективности кусочно-линейной интерполяция правых частей системы ОДУ (8) на сетке
. Перейдем к рассмотрению эффективности кусочно-линейной интерполяция правых частей системы ОДУ (8) на сетке ![]() (рисунки 15 – 17).
(рисунки 15 – 17).

Рисунок 15 – Дальняя граница ОДЛА:
модель 1; кусочно-линейная интерполяция; сетка ![]()

Рисунок 16 – Относительная ошибка ![]() :
:
модель 1; кусочно-линейная интерполяция; сетка ![]()

Рисунок 17 – Относительные ошибки ![]() ,
, ![]() ,
, ![]() ,
, ![]() :
:
модель 1; кусочно-линейная интерполяция; сетка ![]()
Результаты исследования показывают, что максимальное значение ошибки ![]() на сетке
на сетке ![]() составляет
составляет ![]() , а оценки математического ожидания и дисперсии ошибок
, а оценки математического ожидания и дисперсии ошибок ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() – равны
– равны

Сетка ![]() . Рассмотрим, наконец, эффективность кусочно-линейной интерполяция правых частей системы ОДУ (8) на сетке
. Рассмотрим, наконец, эффективность кусочно-линейной интерполяция правых частей системы ОДУ (8) на сетке ![]() (рисунки 18 – 20).
(рисунки 18 – 20).
Из результатов исследования вытекает, что максимальное значение ошибки ![]() на сетке
на сетке ![]() составляет равно
составляет равно ![]() , а оценки математического ожидания и дисперсии ошибок
, а оценки математического ожидания и дисперсии ошибок ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() равны
равны


Рисунок 18 – Дальняя граница ОДЛА:
модель 1; кусочно-линейная интерполяция; сетка ![]()

Рисунок 19 – Относительная ошибка ![]() :
:
модель 1; кусочно-линейная интерполяция; сетка ![]()

Рисунок 20 – Относительные ошибки ![]() ,
, ![]() ,
, ![]() ,
, ![]() :
:
модель 1; кусочно-линейная интерполяция; сетка ![]()
Интегральные результаты исследования представлены на рисунке 21. Рисунок показывает, что в случае кусочно-линейной интерполяции характер зависимости величин ![]() ,
, ![]() ,
, ![]() от суммарного числа узлов используемой сетки
от суммарного числа узлов используемой сетки ![]() имеет вид, отличный от аналогичных зависимостей в случае кусочно-постоянной интерполяции (рисунок 11). Оценки математического ожидания величины
имеет вид, отличный от аналогичных зависимостей в случае кусочно-постоянной интерполяции (рисунок 11). Оценки математического ожидания величины ![]() в данном случае близки к соответствующим оценкам при кусочно-постоянной интерполяции, а аналогичные оценки дисперсии - в несколько раз меньше.
в данном случае близки к соответствующим оценкам при кусочно-постоянной интерполяции, а аналогичные оценки дисперсии - в несколько раз меньше.

Рисунок 21 – Интегральные результаты:
модель 1; локальная кусочно-линейная интерполяция
6. Модель 1. Глобальная полиномиальная аппроксимация
В работах [9, 10] показано, что при аппроксимации правых частей модельной ОДУ методом наименьших квадратов, может быть эффективным использование аппроксимирующих полиномов вида

где величина l определяет максимальную степень переменных состояния исследуемой динамической системы, входящих в аппроксимирующий полином; i– номер уравнения; ![]() – неизвестные константы, определяемые методом наименьших квадратов. На этом основании используем для аппроксимации компонентов вектор-функции
– неизвестные константы, определяемые методом наименьших квадратов. На этом основании используем для аппроксимации компонентов вектор-функции ![]() следующие полиномы (см. формулу (8)):
следующие полиномы (см. формулу (8)):
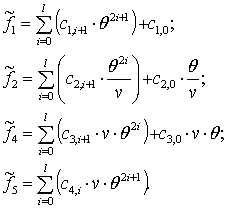 (13)
(13)
Ограничимся рассмотрением сетки ![]() и следующих вариантов аппроксимации: максимальный порядок аппроксимирующего полинома равен трем (
и следующих вариантов аппроксимации: максимальный порядок аппроксимирующего полинома равен трем (![]() ); тот же порядок равен пяти (
); тот же порядок равен пяти (![]() ); порядок равен семи (
); порядок равен семи (![]() ).
).
Вариант 1 (![]() ). Аппроксимирующие полиномы (13) в этом случае определяются следующими выражениями:
). Аппроксимирующие полиномы (13) в этом случае определяются следующими выражениями:
![]() ,
, ![]() ,
, ![]() ;
;
![]() ,
,  ,
,

![]() ,
, ![]() ,
, ![]() ;
;
![]() ,
, ![]() ,
, ![]() .
.
Здесь и далее ![]() - символ скалярного произведения векторов.
- символ скалярного произведения векторов.
Эффективность варианта 1 аппроксимации правых частей системы ОДУ (8) иллюстрируют рисунки 22 – 24.

Рисунок 22 – Дальняя граница ОДЛА:
модель 1; полиномиальная аппроксимация; вариант 1

Рисунок 23 – Относительная ошибка ![]() :
:
модель 1; полиномиальная аппроксимация; вариант 1

Рисунок 24 – Относительные ошибки ![]() ,
, ![]() ,
, ![]() ,
, ![]() :
:
модель 1; полиномиальная аппроксимация; вариант 1
Результаты исследования показывают, что максимальное значение ошибки ![]() в рассматриваемом варианте полиномиальной аппроксимации функции
в рассматриваемом варианте полиномиальной аппроксимации функции ![]() неприемлемо велико и равно
неприемлемо велико и равно ![]() . Оценки математического ожидания и дисперсии ошибок
. Оценки математического ожидания и дисперсии ошибок ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() имеют вид
имеют вид

Вариант 2 (![]() ). Аппроксимирующие полиномы в этом случае определяются выражениями:
). Аппроксимирующие полиномы в этом случае определяются выражениями:
![]() ,
, ![]() ,
, ![]() ;
;
![]() ,
,  ,
,

![]() ,
, ![]() ,
, ![]() ;
;
![]() ,
, ![]() ,
, ![]() .
.
Эффективность данного варианта аппроксимации иллюстрируют рисунки 25 – 27.

Рисунок 25 – Дальняя граница ОДЛА:
модель 1; полиномиальная аппроксимация; вариант 2

Рисунок 26 – Относительная ошибка ![]() :
:
модель 1; полиномиальная аппроксимация; вариант 2

Рисунок 27 – Относительные ошибки ![]() ,
, ![]() ,
, ![]() ,
, ![]() :
:
модель 1; полиномиальная аппроксимация; вариант 2
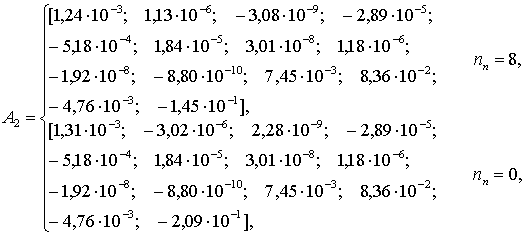
Максимальная ошибка ![]() в данном случае составляет
в данном случае составляет ![]() (рисунок 26); соответствующие оценки математического ожидания и дисперсии имеют вид
(рисунок 26); соответствующие оценки математического ожидания и дисперсии имеют вид

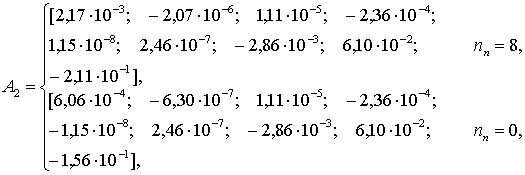
Вариант 3 (![]() ). Аппроксимирующие полиномы в этом варианте определяются выражениями
). Аппроксимирующие полиномы в этом варианте определяются выражениями
![]() ,
, ![]() ,
, ![]() ;
;
![]() ,
,  ,
,

![]() ,
, ![]() ,
,
![]() ;
;
![]() ,
, ![]() ,
, ![]() .
.
Эффективность рассматриваемого варианта 3 аппроксимации иллюстрируют рисунки 28 – 30.

Рисунок 28 – Дальняя граница ОДЛА:
модель 1; полиномиальная аппроксимация; вариант 3

Рисунок 29 – Относительная ошибка ![]() :
:
модель 1; полиномиальная аппроксимация; вариант 3

Рисунок 30 – Относительные ошибки ![]() ,
, ![]() ,
, ![]() ,
, ![]() :
:
модель 1; полиномиальная аппроксимация; вариант 3
Результаты исследования показывают, что максимальная ошибка ![]() в этом случае равна
в этом случае равна ![]() ; соответствующие оценки математического ожидания и дисперсии величин
; соответствующие оценки математического ожидания и дисперсии величин ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() имеют вид
имеют вид

Интегральные результаты исследования представлены на рисунке 31. Рисунок показывает, что с ростом максимального порядка аппроксимирующих полиномов оценка математического ожидания погрешности ![]() быстро уменьшается с
быстро уменьшается с ![]() при
при ![]() до
до ![]() при
при ![]() . Еще быстрее уменьшается оценка дисперсии указанной погрешности – с
. Еще быстрее уменьшается оценка дисперсии указанной погрешности – с ![]() при
при ![]() до
до ![]() при
при ![]() .
.

Рисунок 31 – Интегральные результаты:
модель 1; глобальная полиномиальная аппроксимация
По сравнению с кусочно-линейной интерполяцией на той же сетке ![]() , рассматриваемый метод обеспечивает при
, рассматриваемый метод обеспечивает при ![]() примерно в 10 раз меньшую оценку математического ожидания погрешности
примерно в 10 раз меньшую оценку математического ожидания погрешности ![]() и на три порядка меньшую оценку дисперсии этой величины.
и на три порядка меньшую оценку дисперсии этой величины.
7. Модель 2. Глобальная полиномиальная аппроксимация
Как и в предыдущих разделах ограничимся рассмотрением «плоских» траекторий, когда скоростной угол крена ![]() . Используем для аппроксимации функции
. Используем для аппроксимации функции ![]() полиномы, несколько отличные от полиномов (13):
полиномы, несколько отличные от полиномов (13):
 (14)
(14)
Аналогично разделу 6, аппроксимацию (14) выполним на сетке ![]() методом наименьших квадратов и последовательно рассмотрим варианты аппроксимации, соответствующие
методом наименьших квадратов и последовательно рассмотрим варианты аппроксимации, соответствующие ![]() ,
, ![]() и
и ![]() .
.
Вариант 1 (![]() ). Аппроксимирующие полиномы (14) в данном случае имеют вид:
). Аппроксимирующие полиномы (14) в данном случае имеют вид:
![]() ,
,

![]() ;
;
![]() ,
, ![]() ,
,
 ;
;
![]() ,
, ![]() ,
, ![]() ;
;
![]() ,
, ![]() ,
, ![]() .
.
Эффективность данного варианта аппроксимации иллюстрируют рисунки 32 – 34.

Рисунок 32 – Дальняя граница ОДЛА:
модель 2; полиномиальная аппроксимация; вариант 1

Рисунок 33 – Относительная ошибка ![]() :
:
модель 2; полиномиальная аппроксимация; вариант 1
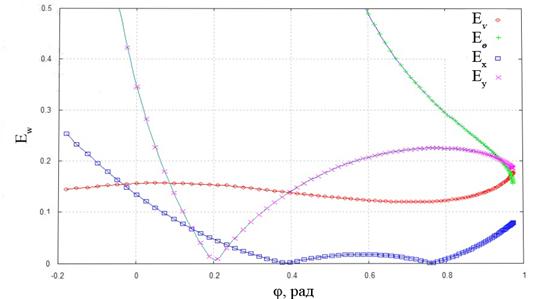
Рисунок 34 – Относительные ошибки ![]() ,
, ![]() ,
, ![]() ,
, ![]() :
:
модель 2; полиномиальная аппроксимация; вариант 1
Из результатов исследования вытекает, что максимальное значение ошибки ![]() в данном случае составляет равно
в данном случае составляет равно ![]() . Соответствующие оценки математического ожидания и дисперсии имеют вид
. Соответствующие оценки математического ожидания и дисперсии имеют вид

Вариант 2 (![]() ). Аппроксимирующие полиномы (14) в этом случае определяют выражения
). Аппроксимирующие полиномы (14) в этом случае определяют выражения
![]() ,
,


![]() ,
,
![]()
![]() ,
, ![]()
![]()
![]() ,
, ![]()
![]()
Эффективность рассматриваемого варианта аппроксимации иллюстрируют рисунки 35 – 37.
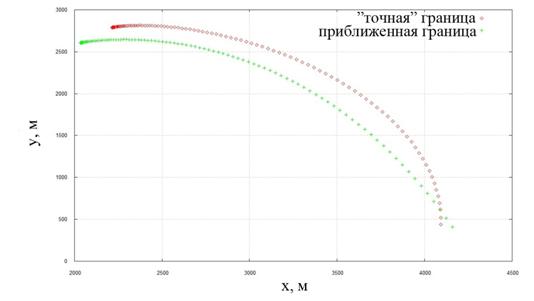
Рисунок 35 – Дальняя граница ОДЛА:
модель 2; полиномиальная аппроксимация; вариант 2

Рисунок 36 – Относительная ошибка ![]() :
:
модель 2; полиномиальная аппроксимация; вариант 2
Результаты данного исследования показывают, что максимальное значение ошибки ![]() в этом случае равно
в этом случае равно ![]() , а оценки математического ожидания и дисперсии ошибок
, а оценки математического ожидания и дисперсии ошибок ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() имеют вид
имеют вид

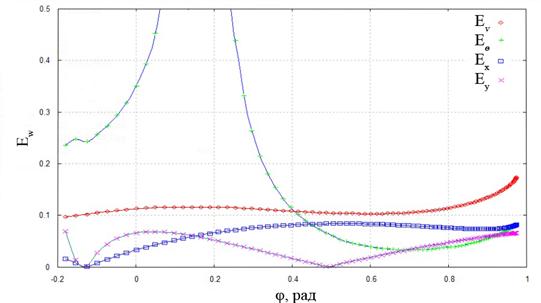
Рисунок 37 – Относительные ошибки ![]() ,
, ![]() ,
, ![]() ,
, ![]() :
:
модель 2; полиномиальная аппроксимация; вариант 2
Вариант 3 (![]() ). Аппроксимирующие полиномы (14) в этом варианте определяются следующими выражениями:
). Аппроксимирующие полиномы (14) в этом варианте определяются следующими выражениями:
![]() ,
,


![]() ,
,

![]() ,
,
![]()
![]()
![]() ,
,
![]()
![]()
Эффективность данного варианта аппроксимации иллюстрируют рисунки 38 – 40.

Рисунок 38 – Дальняя граница ОДЛА:
модель 2; полиномиальная аппроксимация; вариант 3

Рисунок 39 – Относительная ошибка ![]() :
:
модель 2; полиномиальная аппроксимация; вариант 3
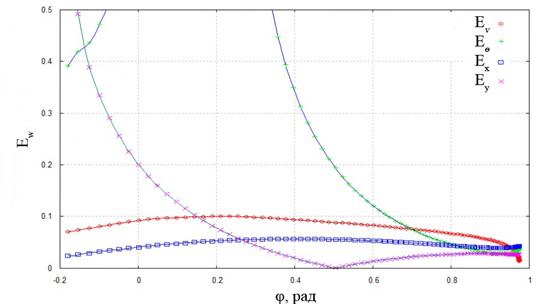
Рисунок 40 – Относительные ошибки ![]() ,
, ![]() ,
, ![]() ,
, ![]() :
:
модель 2; полиномиальная аппроксимация; вариант 3
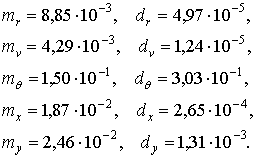
Результаты исследования показывают, что рассматриваемый вариант аппроксимации обеспечивает значения ошибки ![]() , не превышающие величины 0,007. При этом оценки математического ожидания и дисперсии равны
, не превышающие величины 0,007. При этом оценки математического ожидания и дисперсии равны

Интегральные результаты исследования представлены на рисунке 41. Рисунок показывает, что при построении дальней границы ОДЛА глобальная полиномиальная аппроксимация правых частей системы ОДУ (9) уже при ![]() позволяет получить оценку математического ожидания ошибки
позволяет получить оценку математического ожидания ошибки ![]() . Оценка дисперсии указанной ошибки равна
. Оценка дисперсии указанной ошибки равна ![]() (при
(при ![]() ).
).

Рисунок 41 – Интегральные результаты:
модель 2; глобальная полиномиальная аппроксимация
Заключение
Приведенные результаты исследования показывают, прежде всего, что комбинация методов мультифиниша и аппроксимации векторного поля модельной системы ОДУ может быть использована для приближенного построения области достижимости динамической системы с достаточно высокой точностью. Требуемую точность можно обеспечить с помощью всех рассмотренных способов аппроксимации векторного поля. Для выбора подходящего способа могут быть использованы интегральные результаты, представленные на рисунках 11, 21, 31, 41.
Задача выбора способа аппроксимации векторного поля является многокритериальной. Так, кроме точности приближения границ множества достижимости следует, вообще говоря, учитывать процессорной время, необходимое для построения этих границ, а также требуемые объемы оперативной памяти ЭВМ. Сравним с этой точки зрения методы на основе той или иной локальной интерполяции правых частей модельной системы ОДУ и методы на основе их глобальной полиномиальной аппроксимации. При одинаковой точности приближения границ области достижимости методы первой группы требуют больших объемов оперативной памяти, но зато в этом случае достаточно просто предложить их программную реализацию, которая обеспечивает минимальное процессорное время. С другой стороны, методы второй группы даже при использовании аппроксимирующих полиномов высокой степени требуют пренебрежимо малый объем оперативной памяти, но, если не вести речь о параллельных вычислениях, затраты процессорного времени при этом могут быть существенными.
Следует ожидать, что при использовании глобальных аппроксимирующих полиномов, эффективность комбинации методов мультифиниша и аппроксимации векторного поля модельной системы ОДУ может быть существенно повышена за счет тщательного выбора наиболее подходящей совокупности этих полиномов.
В продолжении работы планируется теоретическое и экспериментальное исследование эффективности параллельных реализаций указанной комбинации методов на вычислительных системах различной архитектуру.
1. Воронов Е.М. Алгоритм оценки границ области достижимости летательного аппарата с учетом тяги / Е.М.Воронов А.А.Карпунин // Вестник МГТУ. Сер. Приборостроение.- 2007.- ╧4(69).- С. 81-99.
2. Гурман В.И. Приближенные методы оптимизации управления летальным аппаратом / В.И.Гурман В.И.Квоков М.Ю.Ухин // Автоматика и телемеханика.- 2008.- ╧4.- С. 191–201.
3. Воронов Е.М., Карпенко А.П., Козлова О.Г., Федин В.А. Численные методы построения области достижимости динамической системы // Вестник МГТУ им. Н.Э. Баумана, серия «Приборостроение», 2010, ╧2 (79), с. 3-20.
4. Воронов Е.М., Карпенко А.П., Федин В.А. Параллельное построение множества достижимости высокоманевренного летательного аппарата методом «мультифиниша» // Параллельные вычислительные технологии (ПаВТ’2010): Труды международной научной конференции (Уфа, 29 марта – 2 апреля 2010 г.) [Электронный ресурс] – Челябинск: Издательский центр ЮУрГУ, 2010. – с. 113-120.
5. Витюков Ф.А., Домашнев В.К., Карпенко А.П., Федин В.А. Построение области достижимости динамической системы на NVidea и AMD графических процессорах // Научный сервис в сети Интернет: суперкомпьютерные центры и задачи Труды международной суперком- пьютерной конференции (21-26 сентября 2009 г., Новороссийск). – М.: Изд-во МГУ, 2010. – с.635-641.
6. Voronov E.M., Karpenko A.P., Kozlova O.G., Fedin V.A., Trofimov A.G. Neuronet approximation of aircraft attainability domain boundary // Optical Memory and Neural Networks (Information Optics), 2010, ╧ 4, с. 291 – 299.
7. Скворцов А.В. Обзор алгоритмов построения триангуляции Делоне / А.В.Скворцов // Вычислительные методы и программирование.- 2002.- Т.3.- С. 14 – 39.
8. Directory of Computational Geometry Software [Электронныйресурс]. (//http://www.geom.uiuc.edu/software/cglist/).
9. Блинов А.О. Многомерная аппроксимация в задачах моделирования и оптимизации / А.О. Блинов В.П. Фраленко // Автоматика и телемеханика.- 2009.- ╧4.- С. 98–109.
10. Хохлов С.Ф. Применение метода Брандона для обработки экспериментальных данных / С.Ф.Хохлов О.И.Школа // Вопросы химии и химической технологов.-1973.- Вып. 28.- с. 204—207.
11. Воеводин В.В. Параллельные вычисления / В.В.Воеводин.– СПб.: БХВ-Петербург 2004.– 608 с.
12. Медведев В.С. Нейронные сети. Matlab 6 // В.С.Медведев В.Г.Потемкин.– М.: Диалог-МИФИ 2001.– 496 с.
13. Козлова О.Г. Нейросетевая аппроксимация границы области достижимости летательного аппарата [Электронный ресурс] / О.Г.Козлова // Электронное научно-техническое издание: наука и образование.- 2009.- ╧7. (http://technomag.edu.ru/doc/129990.html).
Публикации с ключевыми словами: множество достижимости динамической системы, метод мультифиниша, аппроксимации векторного поля, летательный аппарат
Публикации со словами: множество достижимости динамической системы, метод мультифиниша, аппроксимации векторного поля, летательный аппарат
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||