научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 05, май 2011
УДК 681.5
МГТУ им. Н.Э. Баумана
С развитием цивилизации в мире возникает все больше ситуаций, требующих от людей выполнения самых разнообразных работ в тяжелых, опасных, а иногда и несовместимых с жизнью условиях. В помощь людям создаются средства экспериментальной робототехники. Однако, в своем большинстве, они очень похожи друг на друга. Для выполнения задач на суше это, как правило, самоходное колесное или гусеничное шасси с установленными на нем манипулятором, средствами видео наблюдения и другим оборудованием. Управление осуществляется по радиоканалу или кабелю. Электропитание – от аккумуляторов или по кабелю. Эти роботы создаются уже не один десяток лет.
Однако, такая техника, как и любая другая, имеет ограниченные возможности и, соответственно, сферы применения. По этой причине развиваются и другие направления экстремальной робототехники.
Многие ведущие фирмы мира, практически каждый уважающий себя технический университет, считают делом чести создать собственный интеллектуальный двуногий шагающий робот (ДШР). При этом каждый разработчик по-своему понимает роль и место таких роботов в будущем мире. Это говорит, скорее всего, о возможности самого разнообразного их использования. По мнению некоторых специалистов ДШР в ближайшем будущем станут незаменимыми помощниками в быту, освоении подводного и космического пространства, а так же в военном деле.
Научно исследовательские и опытно- конструкторские работы по созданию ДШР активно ведутся в Японии, Южной Корее, Германии, США, Франции, Англии и многих других странах.
В СССР, а затем в России, с начала 70-х годов теоретически и методами математического моделирования выполнен большой объем работ по исследованию динамических режимов движения шагающих роботов. В Институте прикладной математики АН РФ и Институте механики МГУ им. М.В.Ломоносова выполнены фундаментальные работы по исследованию и оптимизации энергетики движения и по разработке алгоритмов управления движением двуногих роботов, перемещающихся в различных динамических режимах движения: ходьба, бег, прыжки. Вопросы устойчивости движения шагающих машин в квазидинамических режимах, когда имеются непродолжительные статически неустойчивые фазы, исследовались в Институте машиностроения АН РФ [1-5].
Однако, при большом теоретическом заделе в России проводилось очень мало экспериментальных исследований динамических режимов движения двуногих шагающих роботов.
В МГТУ им. Н.Э.Баумана давно ведутся работы по созданию ДШР и антропоморфных механизмов [6].
Расчёты показывают, что для создания двуногих шагающих роботов (ДШР) больших размеров и масс наиболее приемлемым является применение гидропривода. Это обусловлено тем, что гидропривод обладает большой энергоёмкостью и возможностью работать в области малых изменений обобщённых координат, характерных для ходьбы ДШР. Вместе с тем, применение гидропривода накладывает определённые ограничения, как при конструировании исполнительного механизма, так и при формировании законов управления движением ДШР.
Для проведения научно-исследовательских работ, направленных на изучение движения ДШР, оснащённых электрогидравлическими следящими приводами (ЭГСП), в МГТУ им. Н.Э. Баумана на кафедре «Гидромеханика, гидромашины и гидропневмоавтоматика» совместно с Межотраслевым институтом повышения квалификации создан лабораторный исследовательский стенд ДШР [7]. Высота исполнительного механизма ДШР (рис. 1) составляет 2.2 м., вес – 220 кг.
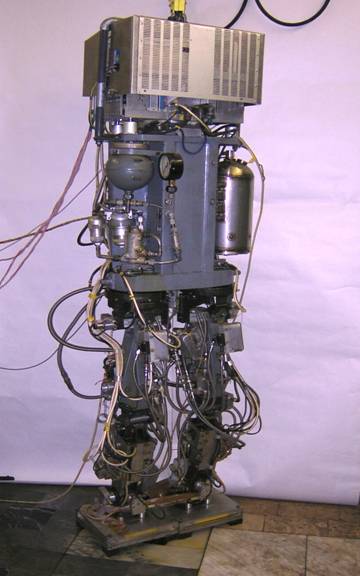
Рис. 1. Лабораторный ДШР (вид спереди)
Исполнительный механизм робота состоит из корпуса и двух ног, имеет 12 степеней подвижности, оснащённых ЭГСП. В качестве исполнительных гидродвигателей используются гидроцилиндры с непроходными штоками. Потоками жидкости в полости гидроцилиндров управляют электрогидравлические усилители типа сопло-заслонка-золотник. В качестве датчиков угла поворота во все шарниры исполнительного механизма установлены синусно-косинусные вращающиеся трансформаторы, работающие в режиме фазовращателей. В корпусе ДШР размещены насосная станция и аппаратура системы управления. Сверху, на корпусе робота, на виброизолированной платформе установлены датчики системы ориентации: три гироскопических датчика угловой скорости и три маятниковых акселерометра. В стопы ног встроены силомоментные датчики. Снизу на стопах, для увеличения податливости, закреплены резиновые накладки. Энергопитание осуществляется по кабелю от внешнего источника трёхфазного напряжения (200 В, 400 Гц.).
Программная часть системы управления лабораторного ДШР реализуется на базе персональных ЭВМ с операционной системой реального времени. Система управления ДШР решает «разноплановые» задачи - формирование траектории движения, управление электрогидравлическими приводами, регистрация экспериментальных данных и т.д. Для её реализации авторами был разработан оригинальный программный комплекс системы управления, позволяющий распределять разработку программных модулей между отдельными специалистами, а их выполнение - между несколькими ЭВМ [8]. На лабораторном стенде ДШР программное обеспечение системы управления выполняется на трёх совместно работающих ЭВМ, объединённых в локальную сеть Ethernet. На рисунке 2 показана структура программного комплекса системы управления ДШР. Логически обособленные задачи управления роботом разрабатываются и оформляются в виде отдельных программных модулей, которые операционная система выполняет как независимые процессы. Функции обеспечения взаимодействия отдельных программных модулей (обмен данными, командами, синхронизация работы) в рамках всей сети ЭВМ, на которых выполняются программные модули системы управления, возлагаются на специальный процесс-транспорт. Взаимодействие программных модулей через процесс – транспорт осуществляется посредством единых протоколов обмена данными и командами.
Рис. 2. Структура программного комплекса системы управления ДШР
Авторы разработали имитационную математическую модель исполнительного механизма, являющуюся частью программного комплекса системы управления ДШР. Программный комплекс ДШР, построен таким образом, что может работать как с реальным исполнительным механизмом, так и с его математической моделью (структура и параметры системы управления при этом не меняются). Это значительно расширило возможности проведения исследовательских работ и позволило проводить настройку регуляторов гидроприводов, системы стабилизации, а так же синтез траектории движения исполнительного механизма путём численного моделирования работы исполнительного механизма.
Математическое моделирование движения исполнительного механизма ДШР
Исполнительный механизм ДШР не закреплён на неподвижном основании. Для математического описания его положения в окружающем пространстве были введены фиктивные звенья с тремя поступательными и тремя вращательными сочленениями, соединяющие неподвижную абсолютную систему координат с корпусом робота [9]. На рисунке 3 приведена кинематическая схема исполнительного механизма ДШР с фиктивными звеньями, а так же расположение связанных систем координат. Кинематическая схема ДШР является ветвящейся, что вызывает определенные сложности при описании кинематики и динамики робота, а также при формировании законов управления его движением.
Рис. 3. Кинематическая схема ДШР и назначение связанных систем координат
Математическая модель исполнительного механизма, учитывающая особенности его кинематической структуры, получена с использованием методики составления блочно-матричных математических моделей исполнительных механизмов, имеющих ветвящуюся кинематическую структуру [10-13].
Представляя кинематическую схему исполнительного механизма в виде древовидного направленного графа (рис. 4) и вводя определённые обозначения и функции для описания кинематических и массогабаритных параметров звеньев [12,13], записываем уравнение движения исполнительного механизма робота с ветвящейся кинематической структурой
![]() , (1)
, (1)
где ![]() - вектор обобщённых координат исполнительного механизма;
- вектор обобщённых координат исполнительного механизма;
![]() - вектор сил, моментов, развиваемых приводами робота;
- вектор сил, моментов, развиваемых приводами робота;
![]() ,
, ![]() - блочные матрицы внешних сил и моментов, приложенных к звеньям со стороны окружающей среды;
- блочные матрицы внешних сил и моментов, приложенных к звеньям со стороны окружающей среды;
![]() ,
, ![]() ,
,![]() и
и ![]() - матричные коэффициенты, вычисляемые в соответствии с ниже приведёнными зависимостями.
- матричные коэффициенты, вычисляемые в соответствии с ниже приведёнными зависимостями.
![]()
![]()
![]() ;
;
![]()
![]()
![]()
![]()
![]()
![]()
![]() ;
;
![]() ;
;
![]() .
.
Как видно из структуры полученного уравнения движения исполнительного механизма, оно является развитием аналогичных уравнений, приведённых в работах Зенкевича С.Л., Ющенко А.С., Лескова А.Г., выведенных для исполнительных механизмов с простой кинематической цепью [10,14].
Для того, чтобы это блочно-матричное уравнение динамики исполнительного механизма, имеющего древовидную кинематическую структуру, описывало движение рассматриваемого в данной статье двуногого шагающего робота, используем обозначения, приведённые в [13], и представляем требуемые параметры исполнительного механизма в блочно-матричном виде.
Матрица достижимости звеньев исполнительного механизма D, описывающая взаимное расположение звеньев исполнительного механизма РМ (рис. 3):
 ,
,
где  ;
;
![]() - матрица, все элементы которой равны 1;
- матрица, все элементы которой равны 1;
![]() - нулевая матрица.
- нулевая матрица.

Рис. 4. Древовидный граф, представляющий кинематическую структуру исполнительного механизма ДШР
Матрица z ,определяющая направление осей связанных систем координат ДШР и их взаимное расположение:
![]() .
.
Матрица коэффициентов, определяющих типы сочленений звеньев ДШР имеет вид: ![]() .
.
Кроме этого определяются следующие матрицы:
![]() - матрица масс звеньев исполнительного механизма ДШР;
- матрица масс звеньев исполнительного механизма ДШР;
![]() - блочная матрица тензоров инерции звеньев;
- блочная матрица тензоров инерции звеньев;
![]() - блочная диагональная матрица векторов, соединяющих начала соответствующих систем координат звеньев-отцов с точками, через которые проходят равнодействующие внешних сил, приложенных к звеньям.
- блочная диагональная матрица векторов, соединяющих начала соответствующих систем координат звеньев-отцов с точками, через которые проходят равнодействующие внешних сил, приложенных к звеньям.
Моделирование связей, накладываемых на стопы ДШР со стороны опорной поверхности, осуществляется путём определения сил и моментов, действующих на стопы со стороны упругих элементов, через которые робот контактирует с опорной поверхностью. Эти силы и моменты при математическом моделировании определяются как функции от рассчитываемых линейной и угловой деформации каждого из упругих элементов стоп. При этом учитываются следующие особенности:
- силы и моменты, действующие со стороны упругих элементов на стопы ДШР (возникают только при контакте соответствующего упругого элемента с опорной поверхностью);
- силы, действующие со стороны опорной поверхности на упругие элементы стоп (ограничены в соответствии с максимальными силами трения).
Определённые силы и моменты учитываются в уравнении динамики исполнительного механизма (1) в качестве внешних сил и моментов, действующих на стопы ДШР (звенья 12 и 18 кинематической структуры исполнительного механизма ДШР, представленной на рис. 3).
Значения компонент вектора ![]() сил и моментов, развиваемых приводами, (1) определяются путём математического моделирования работы ЭГСП. Кроме основных особенностей работы таких приводов [15,16] учитывались нелинейности, обусловленные микрогеометрией золотниковых пар электрогидравлических усилителей [17].
сил и моментов, развиваемых приводами, (1) определяются путём математического моделирования работы ЭГСП. Кроме основных особенностей работы таких приводов [15,16] учитывались нелинейности, обусловленные микрогеометрией золотниковых пар электрогидравлических усилителей [17].
Формирование траектории движения исполнительного механизма
при ходьбе по горизонтальной плоскости
Траектория движения исполнительного механизма ДШР формируется в виде периодических циклов движения, описываемых кусочными гармоническими функциями с малым числом изменяемых параметров [7]. Это позволяет проводить её формирование и оптимизацию с использованием имитационной математической модели робота.
Положение ДШР в декартовом пространстве в каждый момент времени определяется 11-ти мерным вектором положения ![]()
![]() , (2)
, (2)
где ![]() - координаты начала системы координат переносимой стопы в абсолютной системе координат;
- координаты начала системы координат переносимой стопы в абсолютной системе координат;
![]() - углы ориентации переносимой стопы в абсолютной системе координат;
- углы ориентации переносимой стопы в абсолютной системе координат;
![]() - проекция центра масс ДШР на плоскость
- проекция центра масс ДШР на плоскость ![]() абсолютной системы координат;
абсолютной системы координат;
![]() - углы, определяющие ориентацию корпуса робота.
- углы, определяющие ориентацию корпуса робота.
Изменения во времени значений каждой из компонент вектора положения (2) определяются однотипными функциями с соответствующими каждому компоненту параметрами
![]() , (3)
, (3)
где ![]() - относительное время изменения
- относительное время изменения ![]() -й компоненты вектора положения
-й компоненты вектора положения ![]() ;
;
![]() - время, за которое
- время, за которое ![]() -я компонента вектора положения должна измениться на величину
-я компонента вектора положения должна измениться на величину ![]() .
.
На рис. 5 показаны графики изменений компонент вектора положения исполнительного механизма ДШР в декартовом пространстве в соответствии с уравнением (3), обеспечивающих его ходьбу по горизонтальной плоскости.
Рис. 5. Изменения компонент вектора положения ДШР во времени
Условные обозначения, приведённые на рис. 5, обозначают следующее:
![]() ,
, ![]() - координаты центра масс робота;
- координаты центра масс робота;
![]() ,
,![]() - координаты z начал систем координат стоп в абсолютной системе координат;
- координаты z начал систем координат стоп в абсолютной системе координат;
![]() - угол наклона корпуса во фронтальной плоскости;
- угол наклона корпуса во фронтальной плоскости;
![]() и
и ![]() - момент начала поперечного движения центра масс робота и длительность движения центра масс робота;
- момент начала поперечного движения центра масс робота и длительность движения центра масс робота;
![]() и
и ![]() - время начала и продолжительность фазы подъема левой стопы;
- время начала и продолжительность фазы подъема левой стопы;
![]() и
и ![]() - время начала и продолжительность фазы быстрого опускания правой стопы;
- время начала и продолжительность фазы быстрого опускания правой стопы;
![]() и
и ![]() - время начала и продолжительность фазы замедленного опускания правой стопы;
- время начала и продолжительность фазы замедленного опускания правой стопы;
![]() и
и ![]() - время начала и продолжительность фазы корректирующего наклона корпуса;
- время начала и продолжительность фазы корректирующего наклона корпуса;
![]() и
и ![]() - время начала и продолжительность фазы возврата корпуса к вертикальному положению;
- время начала и продолжительность фазы возврата корпуса к вертикальному положению;
![]() - величина подъёма переносимой стопы.
- величина подъёма переносимой стопы.
Таким образом, траектория на конечных отрезках времени становится функцией относительно небольшого числа параметров, по которым её можно тем или иным способом корректировать и оптимизировать с использованием имитационной математической модели робота, а также по результатам эксперимента. При формировании программной траектории движения исполнительного механизма лабораторного ДШР, разработанного авторами, в качестве критерия качества синтезируемой траектории движения были выбраны функции моментов на стопах робота, которые по абсолютной величине должны быть минимальными. Это обеспечивает "запас на стабилизацию" по моментам на стопах, необходимый для удержания робота на выбранной траектории в процессе ходьбы.
Стабилизация движения двуногого шагающего робота управлением моментами на стопах
Во время движения ДШР неизбежно возникают отклонения от расчетных траекторий. Это происходит, в том числе, по следующим причинам:
- алгоритм расчета траектории использует упрощенную модель динамики робота;
- во время движения на робот действуют различные неучтенные силы;
- опорная поверхность имеет форму, отличную от принятой в модели;
- приводы имеют ограниченную динамическую точность.
Стабилизация движения исполнительного механизма ДШР осуществляется путем введения дополнительного отклонения корпуса от первоначально рассчитываемого положения и путем управления моментами на стопах ДШР в процессе ходьбы робота [18]. Силы инерции, возникающие при отклонении корпуса компенсируют силы инерции обусловленные подъемом и опусканием переносимой ноги. Управляемое изменение моментов между стопами ДШР и опорной поверхностью направлено на уменьшение ошибки между заданным и измеренным угловыми положениями корпуса. Отклонение корпуса осуществляется по закону (3), параметры которого определяются на этапе формирования траектории движения исполнительного механизма (рис. 5). Управление моментами на стопах осуществляется в следящем режиме в соответствии со структурной схемой, приведённой на рис. 6. Условные обозначения, приведённые на этом рисунке, обозначают следующее:
ИМ - исполнительный механизм ДШР:
СМД - силомоментные датчики стоп;
СО - система ориентации ДШР;
![]() - вектор обобщённых координат ДШР.
- вектор обобщённых координат ДШР.

Рис. 6. Структура системы стабилизации путем управления моментами на стопах
Синтез устойчивого движения двуногого шагающего робота производится в следующей последовательности:
- формируется программная траектория движения ДШР в декартовом пространстве с требуемыми компенсационными отклонениями корпуса (на имитационной математической модели исполнительного механизма);
- в процессе ходьбы ДШР по рассогласованию между заданным и измеренным угловыми положениями корпуса определяется требуемый внешний момент, который должен быть приложен к исполнительному механизму ДШР для возврата корпуса на рассчитанную траекторию движения;
- определяются дополнительные изменения угловых положений стоп (относительно рассчитанных в соответствии с программной траекторией движения), необходимые для создания требуемого стабилизирующего момента;
- определяются соответствующие им значения обобщённых координат, которые отрабатываются электрогидравлическими следящими приводами замкнутыми обратными связями по положению.
Экспериментальное исследование движения исполнительного механизма
Работоспособность, описанных выше методов формирования траектории движения исполнительного механизма ДШР при его ходьбе по горизонтальной плоскости с использованием системы стабилизации, использующей управление моментами на стопах, была подтверждена экспериментально [7] на лабораторном стенде ДШР (рис. 1). С видеоматериалами проведения эксперимента можно познакомиться на сайте кафедры «Гидромеханика, гидромашины и гидро-пневмоавотматика» МГТУ им. Н.Э.Баумана (http://www.bmstu.ru.~e10). На рис. 7 и 8 приведены графики изменений углового положения корпуса (заданного и измеренного) и вертикальных составляющих сил, действующих на стопы ДШР со стороны опорной поверхности, при ходьбе ДШР по горизонтальной плоскости. Рис. 7 соответствует работе экспериментального комплекса с имитационной математической моделью исполнительного механизма, рис. 8 – с реальным исполнительным механизмом. Условные обозначения, приведённые на рисунках 7 и 8, обозначают следующее:
![]() ,
, ![]() - программные значения высот подъема правой и левой стоп робота;
- программные значения высот подъема правой и левой стоп робота;
![]() ,
, ![]() - вертикальные силы на правой и левой стопах робота, возникающие в процессе ходьбы;
- вертикальные силы на правой и левой стопах робота, возникающие в процессе ходьбы;
![]() ,
, ![]() - программные значения углов наклона корпуса вокруг осей X и Y;
- программные значения углов наклона корпуса вокруг осей X и Y;
![]() ,
, ![]() - измеренные значения углов наклона корпуса вокруг осей X и Y.
- измеренные значения углов наклона корпуса вокруг осей X и Y.
Рис. 7. Моделирование движения ДШР в режиме динамической ходьбы

Рис. 8. Экспериментальная динамическая ходьба ДШР
Выводы
Разработанные и реализованные авторами алгоритмы формирования траектории движения исполнительного механизма ДШР, оснащённого электрогидравлическими приводами, обеспечивают устойчивую ходьбу робота по горизонтальной плоскости.
Применение разработанной математической модели исполнительных механизмов роботов с древовидной кинематической структурой, для формирования траектории движения ДШР показало её адекватность реальному лабораторному макету, позволяющую синтезировать управление движением исполнительного механизма ДШР
Разработанный лабораторный экспериментальный комплекс ДШР целесообразно использовать для решения задач создания перспективных двуногих шагающих роботов с электрогидравлическими приводами.
Литература
1. Белецкий В.В. Двуногая ходьба. М.: Наука, 1984. 287 с.
2. Белецкий В.В., Голубицкая М.Д. Модельная задача двуногой ходьбы с вертикальной не комфортабельностью // Вестник Моск. Ун-та сер. 1. Математика и механика, 1981, ╧3, с. 62-68.
3. Болотин Ю.В. К задаче стабилизации пространственной двуногой ходьбы // В кн.: Механика и управление движением роботов с элементами искусственного интеллекта. М: ИМП АН СССР, 1980, с. 41-46.
4. Зенкевич С.Л., Ющенко А.С. Основы управления манипуляционными роботами. М.: Изд-во МГТУ им. Н.Э.Баумана, 2004. 399 с.
5. Ковальчук А.К., Лобачёв В.И., Яроц В.В. О требуемой точности остановки подвижного манипуляционного робота вблизи объекта работ // Известия вузов. Машиностроение. Москва. 1988. ╧12. С.33-37.
6. Ковальчук А.К., Яроц В.В., Семёнов С.Е. Автоматизированный расчёт мощности электрогидравлических приводов двуногого шагающего робота // Актуальные проблемы повышения качества современного энергомашиностроения: Тез. докл. Межресп. студ. научн. конф., 29-31 марта 1988. М.: МВТУ им. Н.Э.Баумана, 1988. С.46.
7. Исследование принципов управления и стабилизации двуногих шагающих роботов в режиме динамической ходьбы: Отчёт по аналитической ведомственной целевой программе «Развитие научного потенциала высшей школы (2006-2008 годы)» / МГТУ. Руководитель темы А.К.Ковальчук. ГР ╧ 01200703234, Инв. ╧ 02200900140. М., 2008. 150с.
8. Ковальчук А.К., Кулаков Д.Б., Семенов С.Е. Принципы построения программного обеспечения системы управления антропоморфным шагающим роботом // Автоматизация и современные технологии. М.,2007. ╧2. С. 10-15.
9. Ковальчук А.К. Семенов С.Е. Кинематический алгоритм управления движением двуногого шагающего робота // Вестник МГТУ им. Н.Э. Баумана. Приборостроение. 1996. ╧1. С. 57-69.
10. Зенкевич С.Л., Ющенко А.С. Основы управления манипуляционными роботами. Учебник для вузов / Под ред. С.Л. Зенкевича, А.С. Ющенко. 2-е изд., исправ. и доп. М.: Изд-во МГТУ им. Н.Э. Баумана, 2004. 480 с.
11. Виттенбург Й. Динамика систем твёрдых тел. Пер. с англ. / Под ред. В.В. Румянцева. М.: Изд-во «Мир», 1980. 294 с.
12. Ковальчук А.К., Кулаков Д.Б., Семенов С.Е. Математическое описание кинематики и динамики исполнительных механизмов роботов с древовидной кинематической структурой // Известия вузов. Машиностроение. М.: МГТУ им. Н.Э.Баумана, 2008. ╧11. С. 13-24.
13. Ковальчук А.К., Кулаков Д.Б., Семенов С.Е. Блочно-матричные уравнения движения исполнительных механизмов роботов с древовидной кинематической структурой // Известия вузов. Машиностроение. М.: МГТУ им. Н.Э.Баумана, 2008. ╧12. С. 5-21.
14. Лесков А.Г., Ющенко А.С. Моделирование и анализ робототехнических систем. М.: Машиностроение, 1992. 78 с.
15. Попов, Д.Н. Динамика и регулирование гидро- и пневмосистем. Учебник для вузов / 2-е изд., перераб. и доп. М.: Машиностроение, 1987. 464 с, ил.
16. Электрогидравлические усилители мощности / Д.Н. Попов и др. // Инженерные исследования гидроприводов летательных аппаратов. М., 1978. С. 51-78.
17. Фомичёв В.М. Проектирование характеристик золотниковых распределителей в области «нуля» // Гидравлика и Пневматика. М., 2005. ╧20. С. 49-54.
18. Ковальчук А.К., Кулаков Д.Б., Семенов С.Е. Управление исполнительными системами двуногих шагающих роботов. Теория и алгоритмы / Под ред. А.К.Ковальчука. М.: Изд-во МГОУ, 2007. 160 с.
Публикации с ключевыми словами: двуногий шагающий робот, траектория движения, гармонические функции, синтез управления движением
Публикации со словами: двуногий шагающий робот, траектория движения, гармонические функции, синтез управления движением
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||