научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 7, июль 2008
DOI: 10.7463/0708.0096813
УДК 519.6
А.П.Карпенко, В.Н.Малышев, Д.Н.Попов, В.А. Федин
МГТУ им. Н.Э. Баумана, 105005, Москва, 2-я Бауманская ул., д.5.
Введение
Рассматриваемая в работе задача многокритериальной оптимизации автономного электрогидравлического привода представляет собой сложную техническую задачу оптимального проектирования. Под оптимальным проектированием понимают процесс, при котором осуществляется выбор наилучшего по ряду показателей варианта системы из числа возможных вариантов. Оптимальное проектное решения зависит от используемых критериев качества системы, накладываемых на варьируемые параметры ограничений, функции предпочтений лица, принимающего решения [1]. Оптимальное проектирование сложных систем возможно только с помощью систем автоматизированного проектирования, в которых проектные решения или их часть получают путем взаимодействия человека и ЭВМ.
Как и при всяком проектировании, при проектировании автономного электрогидравлического привода можно выделить этап структурного синтеза и этап параметрического синтеза и оптимизации. Структурный синтез систем является наиболее сложной и трудноформализуемой задачей проектирования, которая в настоящее время не может быть решена без участия человека. К факторам, которые нельзя адекватно формализовать относятся, например, фактор сложности устройства, наличие определенной технологической базы, опыт эксплуатации машин и др. Опыт и знания конструктора позволяют выбрать один или несколько наиболее предпочтительных вариантов конструкции, из которых на этапе параметрического синтеза и оптимизации выбирается конечный вариант.
Практика разработки новых конструкций гидроприводов показывает, что значительную долю общих затрат на создание гидропривода составляют экспериментальные исследования и доводочные испытания. Объем этих исследований и испытаний можно существенно сократить за счет использования ЭВМ для численного исследования рабочих процессов, многовариантного проектирования и параметрической оптимизации на основе детальной математической модели гидропривода [1, 2].
Задача оптимизации автономного электрогидравлического следящего привода сводится в работе к трехпараметрической двухкритериальной задаче. Задача многокритериальной оптимизации (МКО-задача) состоит в поиске во множестве ![]() допустимых значений вектора варьируемых параметров
допустимых значений вектора варьируемых параметров ![]() такого вектора
такого вектора ![]() , который (в идеале) обеспечивает минимум (для определенности) всем рассматриваемым критериям оптимальности.
, который (в идеале) обеспечивает минимум (для определенности) всем рассматриваемым критериям оптимальности.
Методы решения задачи многокритериальной оптимизации (МКО-задачи) чрезвычайно разнообразны (что является, в конечном счете, следствием плохой формализуемости этой задачи). Существует несколько способов классификации этих методов, например, классификация, основанная на содержании и форме использования дополнительной информации о предпочтениях лица, принимающего решения (ЛПР) [3]. В соответствии с этой классификацией выделяются следующие классы методов решения МКО-задачи:
· методы зондирования;
· априорные методы;
· апостериорные методы;
· адаптивные методы.
Методы каждого из этих классов имеют свои достоинства и ни один из них не свободен от недостатков, не позволяющих признать его универсальным. Общей идеей всех методов решения МКО-задач является сужение множества допустимых значений вектора варьируемых параметров вплоть до одной или немногих альтернатив.
Метод решения МКО-задачи, который используется в работе, относится к классу прямых адаптивных человекомашинных методов и основан на предположении существования «функции предпочтений лица, принимающего решения (ЛПР)» ![]() , которая определенна на множестве
, которая определенна на множестве ![]() и выполняет его отображение во множество действительных числе R, т.е.
и выполняет его отображение во множество действительных числе R, т.е.
![]() .
.
При этом задача многокритериальной оптимизации сводится к задаче выбора вектора ![]() такого, что
такого, что
![]() .
.
Предполагается, что при предъявлении ЛПР вектора параметров X, а также соответствующих значений всех критериев оптимальности это лицо может оценить соответствующее значение функции предпочтений ![]() .
.
Одной из наиболее известных человекомашинных процедур оценки решений является процедура Дайера-Джиофриона. Другим известным методом данного класса является метод Зайонца-Валлениуса [4].
Современные адаптивные человекомашинные методы реализованы, например, в МКО-системе NIMBUS. Основная идея, реализованная в этой системе, состоит в том, что ЛПР оценивает значения критериев оптимальности, вычисленных системой в текущей точке множества Парето, и разбивает критерии на следующие пять классов: значение критерия оптимальности должно быть уменьшено; значение критерия оптимальности должно быть уменьшено до определенного уровня; значение критерия оптимальности не должно изменяться; значение критерия оптимальности можно увеличить до определенного значения; значение критерия может изменять свободно [5]. На основе этой классификации система формирует от 1 до 4 вспомогательных подзадач, которые позволяют получить от 1 до 4 новых оптимальных решений из области Парето.
В работе [6] предложен класс прямых адаптивных человекомашинных методов решения МКО-задачи, основанный на двухступенчатой аппроксимации функции ![]() . В данной работе используется один из методов этого класса.
. В данной работе используется один из методов этого класса.
1. Конструктивная схема привода
Рассмотрим один из распространенных типов автономного электрогидравлического следящего привода (ЭГСП), конструктивная схема которого представлена на Рис. 1, 2. Электродвигатель 1 приводит во вращение трехшестеренный насос 2, который создает потоки рабочей жидкости, направляемой к золотниковым плунжерам 3. В отсутствие подводимого от электронного усилителя сигнала ![]() жидкость через окна, открытые золотниковыми плунжерами, поступает на слив. Вследствие равенства площадей окон разность давлений в полостях гидроцилиндра 4 равна нулю и поршень 5 вместе со штоком 6 неподвижны. При наличии сигнала в виде напряжения на концах обмотки 7 электромеханического преобразователя (ЭМП) происходит поворот коромысла 8 по или против хода часовой стрелки в зависимости от полярности сигнала. Поворот качалки вызывает перемещение золотниковых плунжеров, увеличивающих открытие одного окна и уменьшающих открытие другого. Соответственно давление в одной полости гидроцилиндра уменьшается, а в другой – увеличивается. Под действием силы, созданной разностью давлений в гидроцилиндре, поршень 5 перемещается до тех пор, пока сигнал
жидкость через окна, открытые золотниковыми плунжерами, поступает на слив. Вследствие равенства площадей окон разность давлений в полостях гидроцилиндра 4 равна нулю и поршень 5 вместе со штоком 6 неподвижны. При наличии сигнала в виде напряжения на концах обмотки 7 электромеханического преобразователя (ЭМП) происходит поворот коромысла 8 по или против хода часовой стрелки в зависимости от полярности сигнала. Поворот качалки вызывает перемещение золотниковых плунжеров, увеличивающих открытие одного окна и уменьшающих открытие другого. Соответственно давление в одной полости гидроцилиндра уменьшается, а в другой – увеличивается. Под действием силы, созданной разностью давлений в гидроцилиндре, поршень 5 перемещается до тех пор, пока сигнал ![]() обратной связи от датчика 10 не компенсирует входной сигнал
обратной связи от датчика 10 не компенсирует входной сигнал ![]() . Установленные на напорных магистралях насоса предохранительные клапаны 9 ограничивают чрезмерное повышение давления в гидроцилиндре. Элементы 3, 8 образуют однокаскадный гидроусилитель.
. Установленные на напорных магистралях насоса предохранительные клапаны 9 ограничивают чрезмерное повышение давления в гидроцилиндре. Элементы 3, 8 образуют однокаскадный гидроусилитель.
2. Математическая модель привода
Воспользовавшись описанной в [7] методикой, математическую модель ЭГСП можно представить в виде следующей системы обыкновенных дифференциальных уравнений (ОДУ):
![]() ; (1)
; (1)
![]() ; (2)
; (2)
![]() ; (3)
; (3)
![]() ; (4)
; (4)
 ; (5)
; (5)
![]() . (6)
. (6)

Рис.1. Конструктивная схема ЭГСП.
В уравнениях (1 – 6) ![]() ,
, ![]() , а переменные состояния имеют следующий смысл:
, а переменные состояния имеют следующий смысл: ![]() - ток усилителя;
- ток усилителя; ![]() - скорость перемещения золотникового плунжера;
- скорость перемещения золотникового плунжера; ![]() - перемещение золотникового плунжера;
- перемещение золотникового плунжера; ![]() - скорость перемещения штока;
- скорость перемещения штока; ![]() - перемещение штока гидроцилиндра. Все начальные условия приняты нулевыми:
- перемещение штока гидроцилиндра. Все начальные условия приняты нулевыми: ![]() ,
, ![]() .
.
Коэффициенты, фигурирующие в системе ОДУ (1) – (6), имеют следующий смысл и значения (см. Рис. 2).
Уравнение (1)
![]() -
-
коэффициент преобразования ЭМП. Здесь ![]() [Ом] -сопротивление обмоток ЭМП,
[Ом] -сопротивление обмоток ЭМП, ![]() [Ом] - сопротивление выходного каскада электронного усилителя.
[Ом] - сопротивление выходного каскада электронного усилителя.
![]() -
-
ступенчатое воздействие на входе электронного усилителя. Здесь ![]() ;
; ![]() ,
, ![]() .
.

Рис. 2. К математической модели привода
В последних формулах ![]() - коэффициент потенциометрической обратной связи,
- коэффициент потенциометрической обратной связи, ![]() - коэффициент усиления электронного усилителя,
- коэффициент усиления электронного усилителя, ![]() - постоянная времени ЭМП;
- постоянная времени ЭМП; ![]() - индуктивность обмоток ЭМП.
- индуктивность обмоток ЭМП.
Уравнение (2)
![]()
![]() - коэффициент преобразования системы золотниковый плунжер - коромысло.
- коэффициент преобразования системы золотниковый плунжер - коромысло.
![]()
![]() - коэффициент преобразования ЭМП.
- коэффициент преобразования ЭМП.
![]() - коэффициент относительного демпфирования системы золотниковый плунжер - коромысло.
- коэффициент относительного демпфирования системы золотниковый плунжер - коромысло.
![]()
![]() - постоянная времени системы золотниковый плунжер - коромысло.
- постоянная времени системы золотниковый плунжер - коромысло.
Уравнение (4)
![]()
![]() - гидравлическая постоянная времени привода, где
- гидравлическая постоянная времени привода, где ![]() - площадь поршня гидроцилиндра,
- площадь поршня гидроцилиндра,  – один из коэффициентов аппроксимации расходно-перепадной характеристики (см. п. 3).
– один из коэффициентов аппроксимации расходно-перепадной характеристики (см. п. 3).
Площадь поршня гидроцилиндра определяется формулой
![]() ,
,
где диаметр поршня
![]() ,
,
диаметр штока ![]() . В последней формуле
. В последней формуле ![]() - рабочая площадь поршня гидроцилиндра и
- рабочая площадь поршня гидроцилиндра и ![]()
![]() ,
,
где ![]() - сила торможения штока гидроцилидра,
- сила торможения штока гидроцилидра, ![]() - давление настройки предохранительных клапанов.
- давление настройки предохранительных клапанов.
Уравнение (5)
![]() - коэффициент относительного демпфирования гидроцилиндра,
- коэффициент относительного демпфирования гидроцилиндра, ![]() - механическая постоянная времени гидроцилиндра.
- механическая постоянная времени гидроцилиндра.
Коэффициент относительного демпфирования гидроцилиндра ![]() определяется формулой
определяется формулой  , где
, где
 -
-
- постоянная времени демпфирования гидроцилиндра. Здесь величина  - один из коэффициентов аппроксимации расходно-перепадной характеристики (см. п. 3),
- один из коэффициентов аппроксимации расходно-перепадной характеристики (см. п. 3), ![]() - масса подвижных частей привода, приведенная к его штоку,
- масса подвижных частей привода, приведенная к его штоку, ![]() - коэффициент трения поршня о стенки гидроцилиндра;
- коэффициент трения поршня о стенки гидроцилиндра; ![]() - объем полости гидроцилиндра при среднем положении поршня (
- объем полости гидроцилиндра при среднем положении поршня (![]() [м] - максимальный ход поршня);
[м] - максимальный ход поршня); ![]() - жесткость связи штока с управляемыми органами объекта. Приведенный модуль упругости гидроцилиндра
- жесткость связи штока с управляемыми органами объекта. Приведенный модуль упругости гидроцилиндра
 ,
,
где ![]() - модуль объемной упругости рабочей жидкости,
- модуль объемной упругости рабочей жидкости, ![]() - объем подводных линий,
- объем подводных линий, ![]() - жесткость опоры гидроцилиндра.
- жесткость опоры гидроцилиндра.
Механическая постоянная времени гидроцилиндра ![]() определяется формулой
определяется формулой

где приведенная жесткость нагруженного гидроцилиндра

3. Коэффициенты аппроксимации расходно-перепадной характеристики
![]() ,
, ![]()
Уравнение линеаризованной расходно-перепадной характеристики имеет вид
![]() ,
,
где ![]() – разность давлений в правой и левой полости гидроцилиндра, соответственно,
– разность давлений в правой и левой полости гидроцилиндра, соответственно, ![]() – расход рабочей жидкости, обеспечивающий движение поршня гидроцилиндра.
– расход рабочей жидкости, обеспечивающий движение поршня гидроцилиндра.
При каждых фиксированных ![]() давление
давление ![]() определяется как решение нелинейного алгебраического уравнения
определяется как решение нелинейного алгебраического уравнения
![]() , (7)
, (7)
где
![]() ,
, ![]() ;
;
 ,
,
 ,
,
![]() ;
;
![]() ,
,
![]() .
.
Здесь ![]() - коэффициент расхода окон, открываемых одним золотниковым плунжером,
- коэффициент расхода окон, открываемых одним золотниковым плунжером, ![]() - количество окон во втулке одного золотникового плунжера,
- количество окон во втулке одного золотникового плунжера,
 - (8)
- (8)
- площадь одного окна золотникового плунжера в положении X, где ![]() [м] - радиус окна во втулке одного золотникового плунжера,
[м] - радиус окна во втулке одного золотникового плунжера, ![]() - плотность рабочей жидкости,
- плотность рабочей жидкости,
 - (9)
- (9)
- теоретическая производительность насоса,  - число оборотов электродвигателя насоса с учетом его изменения из-за нагрузки на валу электродвигателя, где
- число оборотов электродвигателя насоса с учетом его изменения из-за нагрузки на валу электродвигателя, где ![]()
![]() - момент на валу двигателя без учета трения.
- момент на валу двигателя без учета трения.
В выражении (9) приняты обозначения: ![]() - начальное число оборотов двигателя насоса;
- начальное число оборотов двигателя насоса;  - максимальная производительность насоса с учетом непроизводительных утечек в гидрораспределителе, где
- максимальная производительность насоса с учетом непроизводительных утечек в гидрораспределителе, где ![]() - площадь поршня гидроцилиндра (см. выше);
- площадь поршня гидроцилиндра (см. выше); ![]() - максимальная скорость движения поршня гидроцилиндра;
- максимальная скорость движения поршня гидроцилиндра; ![]() - коэффициент увеличения подачи.
- коэффициент увеличения подачи.
Величина открытия золотникового плунжера ![]() в его нейтральном положении находится из нелинейного алгебраического уравнения
в его нейтральном положении находится из нелинейного алгебраического уравнения
![]() (10)
(10)
(см. равенство (8)), где ![]() , где
, где  - площадь проходного сечения золотникового плунжера в нейтральном положении плунжеров. Здесь
- площадь проходного сечения золотникового плунжера в нейтральном положении плунжеров. Здесь ![]() - коэффициент давления, определяющий начальное давление в полостях гидроцилиндра.
- коэффициент давления, определяющий начальное давление в полостях гидроцилиндра.
Нелинейное уравнение (10) может быть решено, например, методом секущих. При этом начальное значение величины ![]() следует выбирать из интервала
следует выбирать из интервала ![]() , а в качестве критерий окончания итераций использовать условие
, а в качестве критерий окончания итераций использовать условие
![]() ,
,
где ![]()
Нелинейное уравнение (7) также может быть решено методом секущих. Начальное значение давления ![]() при этом принимается равным
при этом принимается равным ![]() , а в качестве критерия окончания итераций используется условие
, а в качестве критерия окончания итераций используется условие
![]() , где
, где ![]()
![]() .
.
Если нелинейные уравнения (7), (10) тем или иным методом решены, то коэффициент ![]() может быть найден по следующей схеме:
может быть найден по следующей схеме:
· с шагом ![]() последовательно присваиваем величине
последовательно присваиваем величине ![]() значения
значения ![]() ,
, ![]() ,…,
,…, ![]() , где
, где ![]() ;
;
· для каждого значения ![]() ,
, ![]() вычисляем значение величин
вычисляем значение величин ![]() ;
;
· методом наименьших квадратов находим линейную функцию ![]() , которая приближает функцию
, которая приближает функцию ![]() в смысле минимума среднеквадратичного отклонения ее значений в точках
в смысле минимума среднеквадратичного отклонения ее значений в точках ![]() от значений
от значений ![]() ,
, ![]() .
.
Коэффициент ![]() , может быть найден по аналогичной схеме:
, может быть найден по аналогичной схеме:
· с шагом ![]() последовательно присваиваем величине
последовательно присваиваем величине ![]() значения
значения ![]() ,
, ![]() ,…,
,…, ![]() ;
;
· для каждого ![]() ,
, ![]() вычисляем значение величин
вычисляем значение величин ![]() ;
;
· методом наименьших квадратов находим линейную функцию ![]() , которая приближает функцию
, которая приближает функцию ![]() в смысле минимума среднеквадратичного отклонения ее значений в точках
в смысле минимума среднеквадратичного отклонения ее значений в точках ![]() от значений
от значений ![]() ,
, ![]() .
.
4. Варьируемые параметры и критерий оптимальности
В качестве варьируемых рассматриваются три следующих параметра:
· коэффициент давления ![]() , где
, где ![]() ,
, ![]() ;
;
· коэффициент подачи ![]() ,
, ![]() ,
, ![]() ;
;
· давление настройки предохранительного клапана ![]() , где
, где ![]() ,
, ![]() .
.
Рассматриваются два критерия оптимальности:
· потребляемая мощность при отсутствии управляющего сигнала
![]() ,
,
где ![]() ,
, ![]() .
. ![]() - момент на валу двигателя;
- момент на валу двигателя;
· критерий, формализующий качество переходного процесса в приводе
 ,
,
где установившимся значением фазовой переменной ![]() принимается величина
принимается величина  .
.
5. Постановка задачи многокритериальной оптимизации
Пусть ![]() - вектор параметров задачи (вектор варьируемых параметров), где
- вектор параметров задачи (вектор варьируемых параметров), где ![]() - n-мерное арифметическое пространство (пространство параметров). Множеством допустимых значений вектора параметров Xявляется замкнутое множество
- n-мерное арифметическое пространство (пространство параметров). Множеством допустимых значений вектора параметров Xявляется замкнутое множество ![]() , где параллелепипед допустимых значений вектора параметров
, где параллелепипед допустимых значений вектора параметров
![]() ,
,
а множество ![]() формируют ограничивающие функции
формируют ограничивающие функции ![]() :
:
![]() .
.
Отметим, что параллелепипед П имеет, в основном, «технологический» смысл – определяет диапазоны изменения случайных чисел, формирующих расчетную сетку во множестве ![]() при решении однокритериальной задачи глобальной условной оптимизации, к которой сводится исходная задача многокритериальной оптимизации. Кроме того, параллелепипед П обеспечивает ограниченность и замкнутость множества
при решении однокритериальной задачи глобальной условной оптимизации, к которой сводится исходная задача многокритериальной оптимизации. Кроме того, параллелепипед П обеспечивает ограниченность и замкнутость множества ![]() .
.
Определим векторный критерий оптимальности ![]() со значениями в пространстве
со значениями в пространстве ![]() , где
, где ![]() . Положим, что ЛПР стремится минимизировать на множестве
. Положим, что ЛПР стремится минимизировать на множестве ![]() каждый из частных критериев оптимальности
каждый из частных критериев оптимальности ![]() , что условно будем записывать в виде
, что условно будем записывать в виде
![]() . (11)
. (11)
Здесь ![]() - искомое решение задачи.
- искомое решение задачи.
Множество, в которое векторный критерий оптимальности ![]() отображает множество
отображает множество ![]() , обозначим
, обозначим ![]() и назовем критериальным множеством (множеством достижимости). Множество Парето задачи обозначим
и назовем критериальным множеством (множеством достижимости). Множество Парето задачи обозначим ![]() . Если
. Если ![]() , то будем говорить, что вектор X - эффективный по Парето вектор. Множество векторов, которое порождает множество Парето, обозначим
, то будем говорить, что вектор X - эффективный по Парето вектор. Множество векторов, которое порождает множество Парето, обозначим ![]() и назовем эффективным по Парето множеством.
и назовем эффективным по Парето множеством.
Таким образом, в данном случае пространство варьируемых параметров является трехмерным (![]() ) и компоненты вектора варьируемых параметров равны
) и компоненты вектора варьируемых параметров равны ![]() ,
, ![]() ,
, ![]() . Ограничения на вектор Xвида
. Ограничения на вектор Xвида ![]() отсутствуют. Параллелепипед допустимых значений вектора параметров П определяется следующими равенствами:
отсутствуют. Параллелепипед допустимых значений вектора параметров П определяется следующими равенствами: ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() . Критериальное пространство является двухмерным (m=2) и критерии оптимальности равны
. Критериальное пространство является двухмерным (m=2) и критерии оптимальности равны ![]() ,
, ![]() .
.
Положим, что частные критерии ![]() тем или иным способом нормализованы и сохраним за нормализованными критериями прежние обозначения [4].
тем или иным способом нормализованы и сохраним за нормализованными критериями прежние обозначения [4].
Рассмотрим решение задачи (11) методом скалярной свертки. Способ свертки фиксировать не будем – это может быть аддитивная свертка, мультипликативная свертка, свертка Джоффриона и другие свертки [3]. Обозначим операцию свертки ![]() , где
, где ![]() - вектор весовых множителей,
- вектор весовых множителей, ![]()
![]() - множество допустимых значений этого вектора.
- множество допустимых значений этого вектора.
При каждом фиксированном векторе ![]() метод скалярной свертки сводит решение задачи (11) к решению однокритериальной задачи глобальной условной оптимизации
метод скалярной свертки сводит решение задачи (11) к решению однокритериальной задачи глобальной условной оптимизации
![]() . (12)
. (12)
В силу ограниченности и замкнутости множества ![]() решение этой задачи существует.
решение этой задачи существует.
Хорошо известно, что в случае аддитивной свертки ![]() решение задачи (12)
решение задачи (12) ![]() принадлежит множеству эффективных по Парето векторов. Для произвольной скалярной свертки точка
принадлежит множеству эффективных по Парето векторов. Для произвольной скалярной свертки точка ![]() , полученная в результате решения задачи (12), вообще говоря, не принадлежит множеству Парето. В этой связи обратим внимание на то, что ЛПР не всегда выбирает решение, принадлежащее множеству Парето [8].
, полученная в результате решения задачи (12), вообще говоря, не принадлежит множеству Парето. В этой связи обратим внимание на то, что ЛПР не всегда выбирает решение, принадлежащее множеству Парето [8].
Если при каждом ![]() решение задачи (12) единственно (а при использовании численных методов это всегда имеет место), то условие (12) ставит в соответствие каждому из допустимых векторов
решение задачи (12) единственно (а при использовании численных методов это всегда имеет место), то условие (12) ставит в соответствие каждому из допустимых векторов ![]() единственный вектор
единственный вектор ![]() и соответствующие значения частных критериев оптимальности
и соответствующие значения частных критериев оптимальности ![]() . Это обстоятельство позволяет полагать, что функция предпочтений ЛПР определена не на множестве
. Это обстоятельство позволяет полагать, что функция предпочтений ЛПР определена не на множестве ![]() , а на множестве
, а на множестве ![]() :
:
![]() .
.
В результате задача многокритериальной оптимизации сводится к задаче выбора вектора ![]() такого, что
такого, что
![]() . (13)
. (13)
Поскольку обычно размерность пространства критериев во много раз меньше размерности пространства параметров (![]() ), переход от задачи (12) к задаче (13) важен с точки зрения уменьшения вычислительных затрат.
), переход от задачи (12) к задаче (13) важен с точки зрения уменьшения вычислительных затрат.
Если используется аддитивная свертка и множество достижимости ![]() является выпуклым, то выражение (12) задает взаимно однозначное отображение множества
является выпуклым, то выражение (12) задает взаимно однозначное отображение множества ![]() во множество
во множество ![]() . В этих условиях для любого
. В этих условиях для любого ![]() вектор
вектор ![]() , являющийся решением задачи (12), принадлежит эффективному по Парето множеству
, являющийся решением задачи (12), принадлежит эффективному по Парето множеству ![]() . Если вместо аддитивной свертки используется свертка Джоффриона, то для получения того же результата не требуется выпуклость множества достижимости [3].
. Если вместо аддитивной свертки используется свертка Джоффриона, то для получения того же результата не требуется выпуклость множества достижимости [3].
Величину ![]() будем считать лингвистической переменной со значениями представленными в Табл. 1, где термы есть символы нормальных нечетких подмножеств универсального множества
будем считать лингвистической переменной со значениями представленными в Табл. 1, где термы есть символы нормальных нечетких подмножеств универсального множества ![]() . Напомним, что нормальность нечеткого множества
. Напомним, что нормальность нечеткого множества ![]() означает, что его высота
означает, что его высота ![]()
![]() . Здесь
. Здесь ![]() - функция принадлежности нечеткого множества
- функция принадлежности нечеткого множества ![]() . Ядро (центр)
. Ядро (центр) ![]() нечеткого множества
нечеткого множества ![]() есть величина
есть величина ![]() =
=![]() [9].
[9].
Таблица 1. Допустимые значения функции предпочтений ЛПР, как лингвистической переменной
Функция предпочтений |
|
”Очень-очень плохо” | 1 |
”Очень плохо” | 2 |
”Плохо” | 3 |
”Не совсем удовлетворительно” | 4 |
”Удовлетворительно” | 5 |
”Не совсем хорошо” | 6 |
”Хорошо” | 7 |
”Очень хорошо” | 8 |
”Отлично” | 9 |
В используемом в данной работе методе вместо нечеткой функции ![]() рассматривается четкая дискретная функция
рассматривается четкая дискретная функция ![]() и вместо задачи (13) - задача
и вместо задачи (13) - задача
![]() . (14)
. (14)
6. Метод решения задачи
Общая схема методов, к которому принадлежит используемый метод, состоит из следующих основных этапов [6]:
1) задание ЛПР начальной точки ![]() ,
, ![]() ;
;
2) выполнение на основе планов первого порядка серии экстремальных экспериментов по максимизации функции предпочтений ![]() ;
;
3) построение по результатам указанных экспериментов первой аппроксимирующей функции ![]() ;
;
4) формирование области планирования для аппроксимации функции ![]() ;
;
5) построение второй аппроксимирующей функции ![]() ;
;
6) определение начальной точки ![]() для следующей итерации.
для следующей итерации.
На этапе 2 могут быть использованы симплекс-планы на основе правильных или неправильных симплексов, а также регрессионные планы первого порядка; на этапе 3 – аппроксимация кусочно-линейной функцией, персептронной нейронной сетью и нейронной сетью с радиальными базисными функциями, а также аппроксимация на основе нечетких множеств; на этапах 5, 6 – линейная и квадратичная аппроксимация.
В данной работе на этапе 2 мы используем экстремальный эксперимент на основе правильных симплекс-планов первого порядка, на этапе 3 - аппроксимацию кусочно-линейной функцией, на этапах 5, 6 – квадратичную аппроксимацию на основе полного факторного эксперимента (ПФЭ) второго порядка.
6.1. Этап 2. Экстремальный эксперимент на основе правильных симплекс-планов. Отметим, что по количеству точек в спектре симплекс-планы являются насыщенными планам, т.е. требуют минимально возможного количества испытаний, однако имеют низкую помехозащищенность (сглаживание отсутствует) [10].
Экстремальный эксперимент выполняется по следующей схеме (приводится упрощенная схема).
1) Исходя из текущей начальной точки ![]() , МКО-система (программная система многокритериальной оптимизации) строит начальный правильный симплекс
, МКО-система (программная система многокритериальной оптимизации) строит начальный правильный симплекс ![]() , где
, где ![]() . Если одна или несколько вершин симплекса оказываются вне области допустимых значений
. Если одна или несколько вершин симплекса оказываются вне области допустимых значений ![]() , то МКО-система выдает ЛПР соответствующее сообщение и предлагает либо изменить начальную точку
, то МКО-система выдает ЛПР соответствующее сообщение и предлагает либо изменить начальную точку ![]() , либо уменьшить текущую длину ребра симплекса
, либо уменьшить текущую длину ребра симплекса ![]() .
.
2) Для каждой из вершин ![]() ,
, ![]() симплекса
симплекса ![]() МКО-система выполняет следующие действия:
МКО-система выполняет следующие действия:
- решает задачу (12) с весами ![]() ;
;
- полученные значения компонентов вектора параметров ![]() , а также соответствующие значения частных критериев оптимальности
, а также соответствующие значения частных критериев оптимальности ![]() предъявляет ЛПР;
предъявляет ЛПР;
- запрашивает у ЛПР оценку предъявленного решения - требует ввести соответствующее значение лингвистической переменной ![]() ;
;
3) МКО-система находит минимальное и максимальное значения соответствующих четких значений лингвистической переменной
![]()
![]()
![]() ,
, ![]()
![]() .
.
4) МКО-система отражает вершину ![]() симплекса
симплекса ![]() относительно центра тяжести оставшихся вершин
относительно центра тяжести оставшихся вершин ![]() - находит вершину
- находит вершину ![]() и новый симплекс
и новый симплекс ![]() .
.
5) Для вершины ![]() МКО-система выполняет действия, аналогичные действиям, указанным в п.2 (в результате становится известной величина
МКО-система выполняет действия, аналогичные действиям, указанным в п.2 (в результате становится известной величина ![]() ), полагает
), полагает ![]() и переходит к п.3.
и переходит к п.3.
Заметим, что в этой схеме на всех итерациях, кроме первой, от ЛПР требуется оценка только одного решения.
6.2. Этап 3. Построение вспомогательной аппроксимирующей функции. Пусть по рассмотренной выше схеме последовательно построены правильные симплексы ![]() ,
, ![]() ,…,
,…,![]() . Тогда построение кусочно-линейной аппроксимации
. Тогда построение кусочно-линейной аппроксимации ![]() функции предпочтений ЛПР выполняется по следующей схеме (см. Рис. 3).
функции предпочтений ЛПР выполняется по следующей схеме (см. Рис. 3).
1) МКО-система строит линейные функции ![]() ,
, ![]() ,…,
,…,![]() , имеющие в вершинах соответствующих симплексов значения
, имеющие в вершинах соответствующих симплексов значения ![]() ,
, ![]() ,…,
,…, ![]() ,
, ![]() , а также гиперплоскости
, а также гиперплоскости ![]() ,
, ![]() ,…,
,…,![]() , проходящие через общие точки смежных симплексов.
, проходящие через общие точки смежных симплексов.
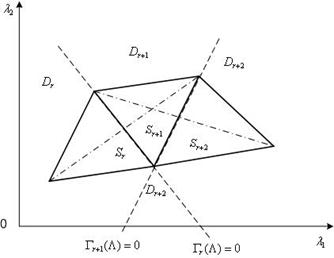
Рис. 3. К кусочно-линейной аппроксимации функции предпочтений ЛПР на симплексах: ![]() ;
; ![]() .
.
2) МКО-система строит кусочно-линейную аппроксимирующую функцию
 (15)
(15)
где
![]() ,
,
![]() ,
,
…
![]() .
.
Здесь ![]() - центр тяжести симплекса
- центр тяжести симплекса ![]() ,
, ![]() . Вместо центра тяжести симплекса
. Вместо центра тяжести симплекса ![]() более удобным может быть использование той из его вершин, которая лежит вне гиперплоскости
более удобным может быть использование той из его вершин, которая лежит вне гиперплоскости ![]() .
.
6.3. Этап 4. Формирование области планирования. В результате этапа 2 симплексы ![]() ,
, ![]() ,…,
,…,![]() могут сформировать область, которая сильно вытянута и произвольно ориентированна в пространстве
могут сформировать область, которая сильно вытянута и произвольно ориентированна в пространстве ![]() . Поскольку качество аппроксимации существенно зависит от выбора области планирования [10], возникает задача определения этой области так, чтобы она была в некотором смысле оптимальной. Методика, изложенная в работе [6], использует для этого переход от системы координат
. Поскольку качество аппроксимации существенно зависит от выбора области планирования [10], возникает задача определения этой области так, чтобы она была в некотором смысле оптимальной. Методика, изложенная в работе [6], использует для этого переход от системы координат ![]() к системе координат
к системе координат ![]() , в которой ребра области планирования (параллелепипеда) параллельны осям этой системы координат.
, в которой ребра области планирования (параллелепипеда) параллельны осям этой системы координат.
В данной работе мы, однако, используем более простой метод – в качестве области планирования используется параллелепипед ![]() минимального объема, ребра которого параллельны осям координат исходной системы координат
минимального объема, ребра которого параллельны осям координат исходной системы координат ![]() (см. Рис. 4).
(см. Рис. 4).
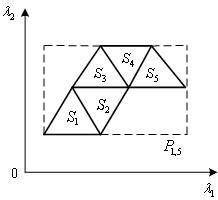
Рис. 4. К построению области планирования: ![]() ;
; ![]()
![]() ;
; ![]() - прямоугольная область планирования
- прямоугольная область планирования
6.4. Этап 5. Аппроксимация вспомогательной функции. Координаты вершин параллелепипеда ![]() обозначим векторами
обозначим векторами ![]() ,
, ![]() , где
, где ![]() - общее количество вершин. Координаты
- общее количество вершин. Координаты ![]() центра параллелепипеда
центра параллелепипеда ![]() определяются при этом формулой
определяются при этом формулой ![]() ,
, ![]() , где
, где ![]() ,
, ![]() . В результате нормализованные (стандартные) факторы
. В результате нормализованные (стандартные) факторы ![]() могут быть вычислены с помощью линейного преобразования
могут быть вычислены с помощью линейного преобразования  ,
, ![]() ,
, ![]() .
.
Для «натуральных» факторов ![]() и нормализованных факторов
и нормализованных факторов ![]() квадратичная регрессионная модель имеет, соответственно, вид
квадратичная регрессионная модель имеет, соответственно, вид
![]() , (16)
, (16)
 ,
,
где общее количество неизвестных коэффициентов равно ![]() . Переход от коэффициентов
. Переход от коэффициентов ![]() к коэффициентам
к коэффициентам ![]() осуществляется по формулам
осуществляется по формулам
![]() ,
,
![]() ,
, ![]() ,
, ![]() ,
,
![]() ,
, ![]() ,
,
![]()
![]()
![]() ,
, ![]() ,
,
где
![]() , если
, если ![]() , и
, и ![]() , если
, если ![]() ;
;
![]() , если
, если ![]() , и
, и ![]() , если
, если ![]() .
.
Схема эксперимента имеет следующий вид.
1) МКО-система строит план ПФЭ ![]() второго порядка с
второго порядка с ![]() точками и выполняет переход от нормализованных факторов
точками и выполняет переход от нормализованных факторов ![]() к «натуральным» факторам
к «натуральным» факторам ![]() ,
, ![]() .
.
2) Для каждой из полученных точек плана ![]() ,
,![]() МКО-система вычисляет значение функции
МКО-система вычисляет значение функции ![]() - находит
- находит ![]() -вектор
-вектор ![]() .
.
3) МКО-система формирует, а затем решает систему линейных алгебраических уравнений (СЛАУ) ![]() , где
, где ![]() матрица
матрица ![]() - матрица Фишера, а
- матрица Фишера, а ![]() - искомый вектор оценок коэффициентов регрессии для нормализованных факторов [10].
- искомый вектор оценок коэффициентов регрессии для нормализованных факторов [10].
4) МКО-система осуществляет проверку значимости оценок коэффициентов регрессии ![]() , а также вычисляет коэффициент детерминации
, а также вычисляет коэффициент детерминации ![]() [10].
[10].
6.5. Этап 6. Определение начальной точки для следующей итерации выполняется по следующей схеме.
1) МКО-система определяет координаты ![]() точки максимума аппроксимирующей квадратичной функции
точки максимума аппроксимирующей квадратичной функции ![]() . Из выражения (16) для квадратичной регрессии следует, что координаты этой точки являются решением следующий СЛАУ
. Из выражения (16) для квадратичной регрессии следует, что координаты этой точки являются решением следующий СЛАУ

2) МКО-система проверяет принадлежность точки ![]() множеству допустимых значений
множеству допустимых значений ![]() . Если
. Если ![]() , то МКО-система полагает
, то МКО-система полагает ![]() и переходит к следующей итерации. В противном случае, полагается
и переходит к следующей итерации. В противном случае, полагается ![]() и выполняется переход на начало данного пункта. Здесь
и выполняется переход на начало данного пункта. Здесь ![]() - свободный параметр метода.
- свободный параметр метода.
7. Организация программной системы
Программная система написана на языке С++ с использованием структурного подхода. Основные шаги программы приведены ниже.
1) Определение минимальных и максимальных значений каждого из частных критериев оптимальности – решение задач
![]() ,
, ![]() ,
, ![]() .
.
2) Нормализация всех частных критериев оптимальности.
3) Ввод начальной точки ![]() .
.
4) Построение исходного симплекса, исходя из точки ![]() .
.
5) Решение задачи (12) для каждой из вершин исходного симплекса ![]() .
.
6) Оценка ЛПР значений функции предпочтений ![]() в каждой из вершин симплекса
в каждой из вершин симплекса ![]() .
.
7) Выполнение одного шага экстремального эксперимента (см. п. 6.1). Полученный симплекс обозначим ![]() , а его новую вершину -
, а его новую вершину - ![]() .
.
8) Решение задачи (12) для точки ![]() .
.
9) Предъявление полученного решения ЛПР. Если решение удовлетворяет его, то завершение вычислений. В противном случае – заданное ЛПР количество раз повторение шагов 7, 8, 9 и переход к следующему шагу.
10) Построение кусочно-линейной аппроксимирующей функции (см. п. 6.2).
11) Построение области планирования (см. п. 6.3).
12) Построение квадратичной аппроксимирующей функции на основе полного факторного эксперимента второго порядка (см. п. 4).
13) Определение новой начальной точки и переход к шагу 5.
Для решения задачи глобальной условной оптимизации (12) в программной системе используется ее сведение с помощью метода штрафных функций к задаче глобальной безусловной оптимизации. Последняя задача решается комбинацией модифицированного метода локальной оптимизации Нелдера-Мида и случайного поиска.
Решение системы линейных алгебраических уравнений, которая возникает при построении квадратичной аппроксимирующей функции, выполняется методом Гаусса с выбором главного элемента.
Для решения задачи Коши для системы обыкновенных дифференциальных уравнений (1 – 6) используется метод Рунге-Кутта 4-го порядка с постоянным шагом.
8. Результаты экспериментов
Для интерпретации результатов экспериментов приведем прежде множество достижимости и множество Парето задачи (см. Рис. 5)..
Для разных начальных точек ![]() и разных начальных размеров симплекса было выполнено 9 экспериментов (см. Табл. 2). Во всех случаях использовались значения параметров метода Нелдера-Мида
и разных начальных размеров симплекса было выполнено 9 экспериментов (см. Табл. 2). Во всех случаях использовались значения параметров метода Нелдера-Мида ![]() ,
, ![]() . Квадратичная аппроксимация выполнялась после 3 – 5 шагов алгоритма Нелдера-Мида. Табл. 2 показывает, что, как и следовало ожидать, количество итераций, необходимых для решения задачи, существенно зависит от размера начального симплекса. При малой длине ребра этого симплекса (
. Квадратичная аппроксимация выполнялась после 3 – 5 шагов алгоритма Нелдера-Мида. Табл. 2 показывает, что, как и следовало ожидать, количество итераций, необходимых для решения задачи, существенно зависит от размера начального симплекса. При малой длине ребра этого симплекса (![]() ) количество итераций в несколько раз превышает количество итераций при
) количество итераций в несколько раз превышает количество итераций при ![]() .
.
Таблица 2. Количество итераций, как функция начальной точки и размера симплекса
Начальная точка | Размер симплекса | ||
0.2 | 0.1 | 0.05 | |
(0.75, 0.25) | 5 | 5 | 10 |
(0.50, 0.50) | 6 | 6 | 10 |
(0.25, 0.75) | 8 | 5 | 21 |
|
|
|
|

Рис. 5. Множество достижимости ![]() (выделено красным) и множество Парето
(выделено красным) и множество Парето
(выделено синим).
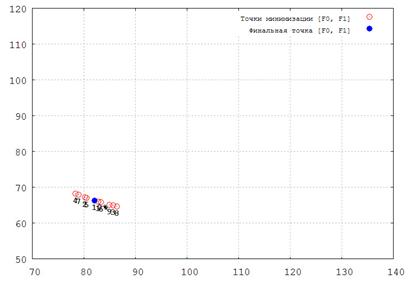
Результаты экспериментов представлены на Рис. 6 (по сравнению с Рис. 5 масштабы изменены!). Рисунок показывает, что во всех случаях найденное ЛПР решение близко к решению, выделенному ЛПР при предъявлении ему множества Парето (точка, выделенная на Рис. 5 зеленным цветом). В качестве ЛПР выступал одни из авторов работы, являющейся специалистом в области гидроприводов.
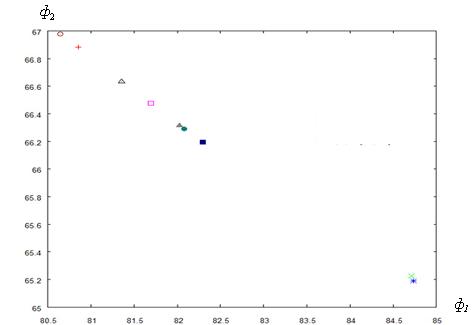
Рис. 6. Результирующие точки всех экспериментов.
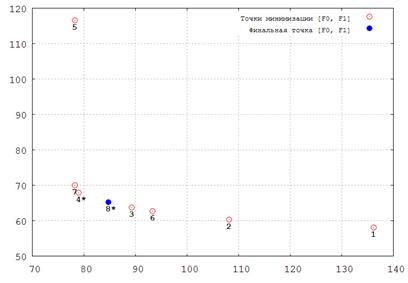
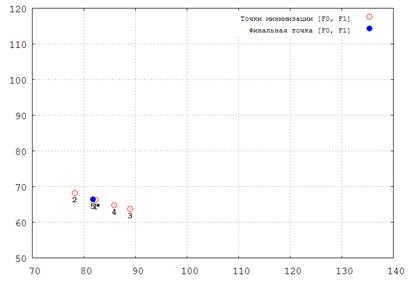
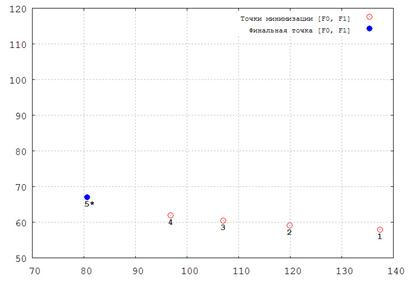
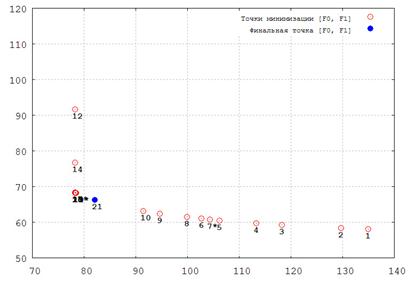
Результаты всех 9 экспериментов приведены в приложении. На рисунках звездочками показаны точки, полученные в результате квадратичной аппроксимации; ![]() - промежуточные точки;
- промежуточные точки; ![]() - финальные точки; числа рядом с точками – их номера по порядку испытаний.
- финальные точки; числа рядом с точками – их номера по порядку испытаний.
9. Заключение
В работе описана математическая модель автономного электрогидравлического следящего привода и поставлена трехмерная двухкритериальная задача его параметрической оптимизации. Рассмотрено применение для решения этой задачи одного прямого адаптивного метода многокритериальной оптимизации. Приведено описание соответствующего программного обеспечения и результаты экспериментов.
Результаты экспериментов по оптимизации гидропривода показали работоспособность рассматриваемого метода многокритериальной оптимизации, а также позволили сформулировать направления совершенствования этого метода.
В развитие работы предполагается выполнить оптимизацию гидропривода при более сложных ограничениях на вектор варьируемых параметров и ограничениях на частные критерии оптимальности.
Литература
1. Боровин Г.К., Малышев В.Н., Попов Д.Н. Математическое моделирование и оптимальное проектирование автономных электрогидравлических приводов. – Москва, 2003. - ╧ 33. - 24 с. (Препринт ИПМ им. М.В. Келдыша РАН).
2. Попов Д.Н. Динамика и регулирование гидро- и пневмосистем. Учеб. для вузов./ М.: Машиностроение, 1987. -467 с.
3. Лотов А.В. Введение в экономико-математическое моделирование. – М.: Наука, 1984. -392 с.
4. Черноруцкий И.Г. Методы принятия решений. –СПб.: БХВ-Петербург. 2005. – 416 с.
5. Miettinen K., Mäkelä M.M. Interactive Multiobjective Optimization System WWW-NIMBUS on the Internet, Computers & Operations Research, Vol. 27, pp. 709-723, 2000.
6. Карпенко А.П., Федорук В.Г. Адаптивные методы решения задачи многокритериальной оптимизации, использующие аппроксимацию функции предпочтений лица, принимающего решения //“Наука и образование: электронное научное издание. Инженерное образование", www.technomag.edu.ru (╧ Гос. регистрации 0420700025, ЭЛ ╧ ФС 77-305 69), апрель, 2008.
7. Малышев В.Н., Попов Д.Н., Сосновский Н.Г. Идентификация автономного электрогидравлического следящего привода. //“Наука и образование: электронное научное издание. Инженерное образование", www.technomag.edu.ru (╧ Гос. регистрации 0420700025, ЭЛ ╧ ФС 77-305 69), июнь, 2007.
8. Ларичев О.И. теория и методы принятия решения. -М.: Университетская книга, Логос, 2006. -392 с.
9. Загоруйко Н.Г. Прикладные методы анализа данных и знаний, Новосибирск, Изд-во Ин-та математики, 1999 г.-270 с.
10. Грачев Ю.П., Плаксин Ю.М. Математические методы планирования эксперимента. –М.: Издательство ДеЛи принт, 2005. - 296 с.
Приложение
![]()
![]()

![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()
![]()
Публикации с ключевыми словами: многокритериальная оптимизация, прямой адаптивный метод, автономный электрогидравлический следящий привод
Публикации со словами: многокритериальная оптимизация, прямой адаптивный метод, автономный электрогидравлический следящий привод
Смотри также:
- Многокритериальная оптимизация на основе нечеткой аппроксимации функции предпочтений лица, принимающего решения
- Исследование погрешности аппроксимации многомерной функции с помощью нейронных сетей с радиальными базисными функциями
- Информационная модель и основные функции программной системы многокритериальной оптимизации ╚Парето╩
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||