научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
#5 май 2008
УДК 621.31(075.8)
С. А. Васюков.
Характеристики современных приборов систем управления движением зависят от точности и стабильности центрирования их подвижных частей. К перспективным видам неконтактных опор приборов относятся электростатические подвесы. Рассмотрены вопросы выбора закона управления потенциалами электродов электростатического подвеса, при которых обеспечивается минимальное влияние заряда ротора на его силовую характеристику.
При проектировании точных приборов систем управления движением (гироскопов, акселерометров, и.т.п.) особую роль играют опоры подвижных систем. Вредных моменты, влияющие на точностные параметры приборов, во многом определяются остаточным трением в опорах и поэтому наиболее перспективными считаются неконтактные опоры к которым можно, прежде всего, отнести магнитные и электростатические подвесы.
Центрирование подвижных частей приборов в электростатических подвесах (ЭСП) достигается путем силового взаимодействия заряженных проводников, образующих электродную систему, и проводящей поверхности взвешиваемого тела. Конфигурация электродной системы имеет прямую связь с геометрией взвешиваемых тел, поэтому применение нашли сферические, рис. 1 а, (для электростатических гироскопов (ЭСГ)) и цилиндрические, рис. 1 б, (для поплавковых акселерометров) подвесы, в которых рабочими поверхностями электродов служат части сферической или цилиндрической поверхностей, разделенных изолирующими промежутками. Взвешиваемое тело (ротор подвеса) окружено системой электродов, представляющих собой тонкие металлизированные площадки, расположенные на внутренней поверхности корпуса.
Характеристики приборов с неконтактными подвесами зависят от точности и стабильности центрирования их чувствительных элементов. Очевидно, что стабильность удержания ротора электростатического гироскопа или подвижной системы поплавкового акселерометра в центре подвеса определяется стабильностью его силовой характеристики.
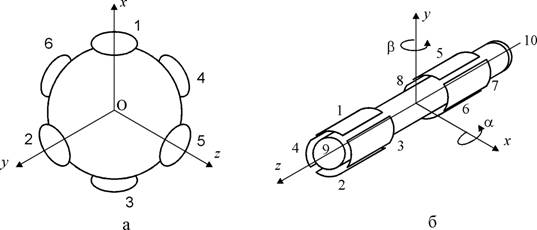
Рис. 1. Электродные системы сферического (а) и цилиндрического (б) подвесов
Расчет силовой характеристики может быть произведен, опираясь на различные математические модели подвеса. В одних моделях предполагается, что электрическое поле полностью сосредоточено в промежутке электрод-ротор [1]. Эти приближенные модели по существу используют зависимость емкости плоского конденсатора от смещения ротора. В других случаях [2] с той или иной степенью приближения решается полевая задача распределения потенциала с последующим определением силовой функции.
Рассмотрим, для примера, условную схему электростатического подвеса, рис. 1 а, с электродами в виде правильных сферических сегментов. Обозначим проводники рассматриваемого подвеса следующим образом: индексом i = 0 - ротор, индексом i = 7- экран (металлизированные межэлектродные промежутки), а i = 1, …., 6 – электроды.
Как известно [1], сила, действующая на твердое тело в электростатическом поле, представляется в виде
![]()
 (1)
(1)
где n – количество проводников; ![]() - коэффициенты электростатической
индукции, которые связывают заряды
- коэффициенты электростатической
индукции, которые связывают заряды ![]() тел с их потенциалами
тел с их потенциалами ![]() ;
;
 j=0... n (2)
j=0... n (2)
Коэффициенты
электростатической индукции имеют размерность емкости, зависят от геометрических
размеров проводников (электродов, ротора, экрана) и их взаимного расположения,
а, следовательно, являются функциями смещения ротора из центра подвеса. Определению
коэффициентов электростатической индукции для различных электродных систем
сферического и цилиндрического подвесов посвящены работы [3, 4]. В них были рассчитаны
так называемые “базовые коэффициенты электростатической индукции” – минимальный
набор коэффициентов, из которых, используя симметрию в конструкциях подвесов и
преобразования координат, можно получить полные матрицы коэффициентов ![]() .
.
Для рассматриваемого подвеса базовые коэффициенты электростатической индукции можно записать как
 (3)
(3)
Здесь ![]() - нормированные (по
отношению к зазору электрод-ротор
- нормированные (по
отношению к зазору электрод-ротор ![]() при центральном положении ротора) смещения ротора
в направлениях x, y, z соответственно. Коэффициенты при нормированных
смещениях в (3) имеют размерность емкости и являются сложными зависимостями от
геометрических размеров подвеса: радиуса ротора
при центральном положении ротора) смещения ротора
в направлениях x, y, z соответственно. Коэффициенты при нормированных
смещениях в (3) имеют размерность емкости и являются сложными зависимостями от
геометрических размеров подвеса: радиуса ротора ![]() зазора
зазора ![]() и углового размера электрода
и углового размера электрода ![]() .
.
Используя (1) и (3),
можно построить выражения проекций силовой характеристики подвеса на оси x, y, z.
Эти выражения получены в работе [5], приведем лишь соотношение для проекции ![]() , проекции на другие оси
получаются преобразованием координат
, проекции на другие оси
получаются преобразованием координат
 (4)
(4)
Электростатический подвес обеспечивает устойчивое центрирование ротора при регулировании потенциалов на электродах. Существует несколько законов управления потенциалами на электродах подвеса. Каким же требованиям должны отвечать эти законы? В первую очередь они должны обеспечивать устойчивость, а также наилучшие рабочие характеристики: перегрузочную способность, жесткость и стабильность центрирования подвесов. Законы регулирования не должны быть слишком сложны в технической реализации. Известно, что наилучшие характеристики имеют подвесы с нулевым потенциалом ротора. Следовательно, законы управления должны обеспечивать минимальный наведенный потенциал ротора.
Система регулирования потенциалов на электродах подвеса включает несколько каналов стабилизации. Число каналов равно, как правило, числу пар диаметрально противоположных электродов. Так, цилиндрический подвес имеет пять каналов стабилизации, из них четыре регулируют положение ротора в радиальном направлении и его угловое положение, один – в осевом. Сферический подвес содержит три канала стабилизации по осям x, y, z.
Каждый канал стабилизации включает датчик перемещения и выходной высоковольтный каскад, подключенные к паре диаметрально противоположных электродов, а также блок усиления и коррекции. Регулирование потенциалов в большинстве практических схем подвесов осуществляется в противофазе. Так, например, в подвесах с амплитудным регулированием в зависимости от смещения ротора напряжение на одном из пары электродов возрастает на определенную величину и на столько же уменьшается напряжение на втором электроде, что создает соответствующую восстанавливающую силу.
Управление в подвесах на постоянном токе происходит по законам
![]() (5)
(5)
Здесь i, j – номера пар диаметрально противоположных электродов.
Коэффициенты ![]() принимают значения плюс или минус
единица, их выбор проводится таким образом, чтобы обеспечить минимальный наведенный
потенциал ротора. Потенциалы
принимают значения плюс или минус
единица, их выбор проводится таким образом, чтобы обеспечить минимальный наведенный
потенциал ротора. Потенциалы ![]() и
и ![]() являются положительными величинами, и представляет
собой начальную уставку или опорное напряжение на электродах. Величина уставки
выбирается с учетом максимально допустимого напряжения на электродах подвеса,
превышение которого приводит к пробою ротор-электродного промежутка. Приращение
потенциала
являются положительными величинами, и представляет
собой начальную уставку или опорное напряжение на электродах. Величина уставки
выбирается с учетом максимально допустимого напряжения на электродах подвеса,
превышение которого приводит к пробою ротор-электродного промежутка. Приращение
потенциала ![]() в (5)
в статическом режиме пропорционально напряжению датчика перемещений.
в (5)
в статическом режиме пропорционально напряжению датчика перемещений.
В последнее время начали широко применяться подвесы, в которых вместо непрерывных систем регулирования используются импульсные или дискретные системы. Высоковольтные каскады этих подвесов работают в ключевом режиме и обеспечивают большую, чем аналоговые подвесы, стабильность центрирования ротора.
Закон управления электростатическим
подвесом, потенциалы на электродах которого регулируются по принципу ШИМ, имеет
вид  (6)
(6)
Приращение длительности ![]() импульсов ШИМ в (6) также
пропорционально напряжению датчика перемещений.
импульсов ШИМ в (6) также
пропорционально напряжению датчика перемещений.
Величина ![]() не должна достигать
половины периода квантования или превышать ее, так как в противном случае
импульсы на электродах вырождаются в постоянный уровень, что нарушает работу
импульсных датчиков. Смысл коэффициентов
не должна достигать
половины периода квантования или превышать ее, так как в противном случае
импульсы на электродах вырождаются в постоянный уровень, что нарушает работу
импульсных датчиков. Смысл коэффициентов ![]() тот же, что и в подвесах на постоянном токе.
тот же, что и в подвесах на постоянном токе.
Отметим, что сила (4),
действующая на ротор, зависит не только от потенциалов электродов ![]() но и от потенциала ротора
но и от потенциала ротора ![]() . Представим потенциал ротора,
используя (2), в виде двух слагаемых
. Представим потенциал ротора,
используя (2), в виде двух слагаемых
 (7)
(7)
Эти слагаемые отражают
две причины возникновения потенциала ротора. Первую![]() обычно связывают с явлением
электростатической индукции в условиях, когда на электродах подвеса заданы
потенциалы
обычно связывают с явлением
электростатической индукции в условиях, когда на электродах подвеса заданы
потенциалы ![]() . Минимизация
этой составляющей достигается выбором закона управления потенциалами и
соответствующей фазировкой опорных напряжений (выбором
. Минимизация
этой составляющей достигается выбором закона управления потенциалами и
соответствующей фазировкой опорных напряжений (выбором ![]() в (5) и (6)) на электродах
подвеса. Вторая составляющая
в (5) и (6)) на электродах
подвеса. Вторая составляющая![]() связана со случайным зарядом ротора
связана со случайным зарядом ротора ![]() .
.
Источником случайного заряда являются утечки через ротор-электродный зазор, которые содержат две основные компоненты: темновые токи и микроразряды. В работе [6] также отмечается возможность появления заряда при первоначальном всплытии ротора с проводящих упоров подвеса.
Поставим задачу минимизации влияния второго слагаемого (7) на силовую характеристику подвеса. Так как нас интересует влияние нестабильности потенциала ротора, перепишем выражение для силовой характеристики (4), оставив в нем лишь те составляющие, на которые потенциал ротора оказывает непосредственное влияние
 (8)
(8)
Будем считать смещения ротора из
центра подвеса малыми (подвес находится в линейной зоне регулирования). В этих
условиях в (8) можно также отбросить несущественную составляющую,
пропорциональную квадрату потенциала ротора. Проанализируем упрощенный случай,
когда центр ротора смещен только вдоль оси ![]() .
.
Рассмотрим работу импульсного
подвеса с ШИМ при законе регулирования (6) на интервале времени ![]() , временные диаграммы
потенциалов на электродах при смещении в направлении электрода Э1 приведены на
рис. 2.
, временные диаграммы
потенциалов на электродах при смещении в направлении электрода Э1 приведены на
рис. 2.
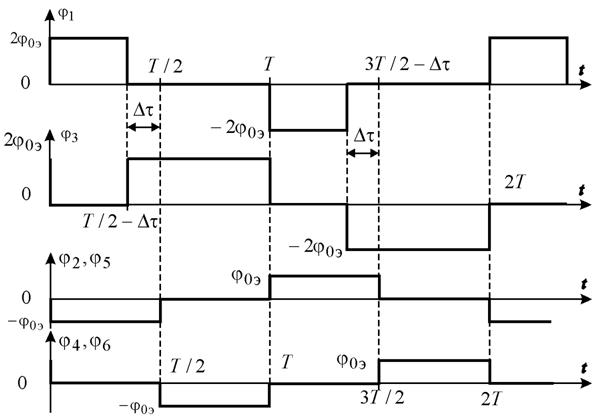
Рис. 2. Временные диаграммы импульсов на электродах подвеса.
Для минимизации индуцированной
составляющей потенциала ротора ![]() амплитуда импульсов на электродах Э1, Э3,
рис. 1 а, оси x составляет
амплитуда импульсов на электродах Э1, Э3,
рис. 1 а, оси x составляет ![]() и в два раза превышает амплитуды
и в два раза превышает амплитуды![]() на электродах Э2, Э4 оси y и электродах Э5, Э6 оси z. Пусть
на электродах Э2, Э4 оси y и электродах Э5, Э6 оси z. Пусть ![]() , тогда длительность импульса на электроде
Э1, по направлению к которому смещен ротор, уменьшается на величину
, тогда длительность импульса на электроде
Э1, по направлению к которому смещен ротор, уменьшается на величину ![]() , а на противоположном
электроде Э3 увеличивается на
, а на противоположном
электроде Э3 увеличивается на ![]() . Импульсы напряжения на электродах Э2, Э4 и
Э5, Э6 по длительности равны
. Импульсы напряжения на электродах Э2, Э4 и
Э5, Э6 по длительности равны ![]() , так как смещение ротора в направлении этих
электродов отсутствует.
, так как смещение ротора в направлении этих
электродов отсутствует.
Для вычисления индуцированной
составляющей потенциала ротора ![]() запишем предварительно значения
коэффициентов электростатической индукции
запишем предварительно значения
коэффициентов электростатической индукции ![]() , на основе базовых коэффициентов (3), используя
преобразования координат и пренебрегая составляющими при квадратах смещений
, на основе базовых коэффициентов (3), используя
преобразования координат и пренебрегая составляющими при квадратах смещений
 (9)
(9)
Разобьем интервал ![]() на три однородных участка, в
пределах которых потенциалы на электродах не меняют своего значения, и
вычислим, опираясь на (7) и (9), потенциал ротора для каждого участка:
на три однородных участка, в
пределах которых потенциалы на электродах не меняют своего значения, и
вычислим, опираясь на (7) и (9), потенциал ротора для каждого участка:
- 1-й интервал ![]()

- 2-й интервал ![]()
![]()
- 3-й интервал ![]()
![]()
Изменение заряда ![]() на роторе происходит достаточно
медленно и в течение периода ШИМ случайную составляющую потенциала можно принять
неизменной
на роторе происходит достаточно
медленно и в течение периода ШИМ случайную составляющую потенциала можно принять
неизменной ![]() .
Суммарная величина потенциала ротора на каждом участке складывается из
индуцированной и случайной составляющей
.
Суммарная величина потенциала ротора на каждом участке складывается из
индуцированной и случайной составляющей
![]() .
(10)
.
(10)
Теперь можно записать на основе (8), (10) и поинтервальных значений индуцированной составляющей потенциала ротора выражения сил на каждом интервале
 (11)
(11)
Вычисляя среднюю за период ШИМ силу, получим
 (12)
(12)
В выражении (12) присутствуют две
составляющие ![]() и
и ![]() , пропорциональные
случайной составляющей потенциала ротора
, пропорциональные
случайной составляющей потенциала ротора ![]() , причем эти составляющие увеличиваются с
ростом смещения центра ротора
, причем эти составляющие увеличиваются с
ростом смещения центра ротора ![]() (приращение
(приращение ![]() в статическом режиме также пропорционально
смещению
в статическом режиме также пропорционально
смещению ![]() ). В
этом смысле, применение астатического регулирования (где смещение
). В
этом смысле, применение астатического регулирования (где смещение ![]() стремится к нулю)
значительно снижает вклад этих составляющих.
стремится к нулю)
значительно снижает вклад этих составляющих.
Если сигнал ШИМ на электродах подвеса
не меняет полярность (потенциалы на электродах в последующие периоды повторяют
сигнал на участке ![]() ,
рис. 2), нестабильность случайной составляющей
,
рис. 2), нестабильность случайной составляющей ![]() будет приводить к нестабильности силовой характеристики
подвеса (4). Будем называть такой импульсный подвес однополярным.
будет приводить к нестабильности силовой характеристики
подвеса (4). Будем называть такой импульсный подвес однополярным.
Вычислим теперь среднюю силу на
участке ![]() , рис. 2,
где по сравнению с участком
, рис. 2,
где по сравнению с участком ![]() потенциалы на всех электродах подвеса
сменили знак. Предварительно разбиваем этот участок на три однородных интервала
и вычисляем индуцированную составляющую потенциала ротора на каждом из них:
потенциалы на всех электродах подвеса
сменили знак. Предварительно разбиваем этот участок на три однородных интервала
и вычисляем индуцированную составляющую потенциала ротора на каждом из них:
- 4-й интервал ![]()
![]()
- 5-й интервал ![]()
![]()
- 6-й интервал ![]()
![]()
Так как полярность сигналов на
электродах в промежуток ![]() противоположна
полярности сигналов участка
противоположна
полярности сигналов участка ![]() , то и потенциал ротора на однородных участках
получился противоположным:
, то и потенциал ротора на однородных участках
получился противоположным: ![]() .
.
Случайная, медленно меняющаяся
составляющая потенциала ![]() знак
не меняет и остается практически одинаковой как на участке
знак
не меняет и остается практически одинаковой как на участке ![]() , так и на участке
, так и на участке ![]() . Вычисляя среднюю силу
для промежутка
. Вычисляя среднюю силу
для промежутка ![]() ,
получаем
,
получаем
 (13)
(13)
Сравнивая выражения средних сил (11)
и (13), замечаем, что составляющие, пропорциональные ![]() в них противоположны и средняя сила
в них противоположны и средняя сила
![]() подвеса на
участке
подвеса на
участке ![]() не
зависит от случайной составляющей потенциала ротора
не
зависит от случайной составляющей потенциала ротора
![]() (14)
(14)
Проверим вывод, сделанный на основе приближенных аналитических расчетов, на нелинейной многомерной модели подвеса, реализованной в среде Simulink Matlab 2006.
Моделирование для подвеса с
сегментными электродами, рис. 1 а, проводилось при следующих размерах ротора и
электродной системы: радиус ротора ![]() зазор электрод-ротор при центральном положении
ротора
зазор электрод-ротор при центральном положении
ротора ![]() угловой
размер электрода
угловой
размер электрода ![]() .
Подвес рассчитывался на максимальную перегрузку
.
Подвес рассчитывался на максимальную перегрузку ![]() . Было промоделировано четыре варианта
управления потенциалами на электродах подвеса.
. Было промоделировано четыре варианта
управления потенциалами на электродах подвеса.
Вариант 1. Подвес на постоянном токе.
Линейная зона подвеса – 10% от зазора, корректирующий контур, обеспечивающий
устойчивость подвеса – интегро-дифференцирующее звено (регулирование со
статической ошибкой), опорное напряжение на электродах при центральном
положении ротора по осям y
и z - ![]() , по оси x -
, по оси x - ![]()
Вариант 2. То же, что и в варианте 1, но подвес астатический (корректирующий контур – ПИД-регулятор).
Вариант. 3. Импульсный подвес с
регулированием потенциалов по принципу ШИМ, частота следования импульсов ![]() . Коррекция - интегро-дифференцирующее
звено. Амплитуда импульсов на электродах осей y и z
-
. Коррекция - интегро-дифференцирующее
звено. Амплитуда импульсов на электродах осей y и z
- ![]() , по оси x -
, по оси x - ![]() Полярность импульсов в пределах каждой оси
неизменна (см. рис. 2 на интервале
Полярность импульсов в пределах каждой оси
неизменна (см. рис. 2 на интервале ![]() ).
).
Вариант. 4. То же, что и в варианте
3, но со сменой полярности в пределах каждого электрода (см. рис. 2 на
интервале ![]() ).
).
При моделировании ось x принималась весовой (перегрузка по
оси x составляла ![]() , величина смещения центра ротора при
статическом регулировании
, величина смещения центра ротора при
статическом регулировании ![]() ). В потенциал ротора принудительно
добавлялась переменная составляющая
). В потенциал ротора принудительно
добавлялась переменная составляющая ![]() с амплитудой
с амплитудой ![]() и линейной частотой
и линейной частотой ![]() , имитирующая случайную
составляющую потенциала ротора.
, имитирующая случайную
составляющую потенциала ротора.
Результаты моделирования для подвеса
на постоянном токе приведены на рис. 3 а, б. При статическом регулировании,
рис. 3 а, амплитуда колебаний центра ротора по оси x составила примерно ![]() . При астатическом регулировании, рис. 3 б,
произошло снижение амплитуды колебаний в 17 раз до
. При астатическом регулировании, рис. 3 б,
произошло снижение амплитуды колебаний в 17 раз до ![]()
Для импульсного однополярного подвеса (вариант 3), рис. 3 в, амплитуда колебаний оказалась такой же, как и для варианта 1 подвеса на постоянном токе.
Применение двухполярного импульсного
подвеса (вариант 4) снизило величину колебаний, рис. 3 г, до ![]() т.е. в 25 раз.
т.е. в 25 раз.

Рис. 3. Результаты имитационного моделирования
Сплошной черный фон на рис. 3 в, г -
вынужденные колебания сферического ротора с частотой ШИМ ![]()
Выводы: проделанные расчеты и результаты имитационного моделирования позволяют утверждать, что нестабильность случайного заряда ротора в двухполярных подвесах со сменой знака потенциала в пределах каждого электрода практически не влияет (в отличие от однополярных импульсных подвесов и подвесов на постоянном токе) на силовую характеристику и стабильность центрирования.
Список литературы.
1. Staats R. Electric field suspension of inertial masses // IEEE. Iner. Conv. Record. 1964. Vol. 12. ╧ 1.
2. Мартыненко Ю. Г. Движение твердого тела в электрических и магнитных полях. М.: Наука, 1988.
3. С. А. Васюков, Г. Ф. Дробышев. Математическая модель цилиндрического электростатического подвеса как системы заряженных проводников //Вестник МГТУ им. Н. Э. Баумана. Сер. Фундаментальные науки.-2007.-╧ 1.-С.72-87.
4. С. А. Васюков, Г. Ф. Дробышев. Распределение потенциала и коэффициенты электростатической индукции в сферическом электростатическом подвесе //Вестник МГТУ им. Н. Э. Баумана. Сер. Фундаментальные науки.-2007.-╧ 2.-С.101-112.
5. С. А. Васюков. О влиянии законов управления потенциалами на силовые характеристики сферического электростатического подвеса//Наука и образование. Инженерное образование. Электронный журнал.- www.techno.edu.ru.- октябрь, 2007, 25 С.
6. А. С. Анфиногенов, О. Г. Дряпак и др. Потенциал ротора электростатического гироскопа при различных структурах его подвеса//Гироскопия и навигация.-2003.-╧ 3.-С.37-40.
Публикации с ключевыми словами: электростатический подвес
Публикации со словами: электростатический подвес
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||