научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
#7 июль 2007
Попков Михаил Викторович
средняя школа ╧ 304, 11 класс
Научный руководитель:
Гаврюшин Сергей Сергеевич,
доктор технических наук,
профессор кафедры «Прикладная механика»
МГТУ им. Н.Э.Баумана
Введение
При разработке современных робототехнических комплексов актуальной является проблема создания различных приводов и механизмов для перемещения твердых тел и различных жидкостей.
Для решения этих задач перспективным направлением является использование принципов биомеханики.
В природе часто можно наблюдать организмы, использующие для своего перемещения периодические волны деформации, распространяющиеся по телу или частям тела. Для обозначения этого процесса существует специальный термин – «перистальтическое движение».
Этот принцип движения уже активно используется в технике. Например, на рис. 1 показано устройство перистальтического шлангового насоса. Ролик, сжавший эластичный шланг, с помощью внешнего привода «перекатывается» по шлангу, создавая в нем волну деформации. Эта волна деформации движется к выходу насоса и как бы выдавливает жидкость из шланга, одновременно засасывая новую порцию через входное отверстие.

Рис. 1. Перистальтический шланговый насос: чертеж и внешний вид.
1 – эластичный шланг, 2 – цилиндрический барабан, 3 – ролик, 4 – регулировочные болты,
5 – зажим, 6 – диск ротора насоса, 7 – тяги, 8 – противовес, 9 – ось насоса (труба), 10 – рама,
11 – штуцер, 12 – диск ротора насоса, 13 – шкив ременной передачи
Однако, этот механизм (насос), хорошо работает с жидкостями, но плохо подходит или не подходит вообще для транспортирования в трубе твердых, сыпучих, тестообразных или вязких веществ. Для этих материалов нужны другие механизмы.
В данной работе рассматривается один из возможных вариантов реализации механизма, использующего принцип перистальтического движения, для перемещения твердых и тестообразных материалов в трубопроводе на основе модели гиперболоида.
1. Описание принципа перистальтического движения
Наблюдения за садовой гусеницей, дождевым червем, змеей, улиткой, убеждают в том, что движение этих существ можно представить как образование волн деформации на одном конце продолговатого эластичного тела и перемещение их вдоль него, то есть как бегущий процесс локальной деформации. В движении гусеницы и дождевого червя есть принципиальные отличия. По телу первой бежит поперечная (изгибная) волна деформации, а по телу червя одиночные продольные волны деформации удлинения.
Главная особенность такого движения – цепной процесс малых смещений соседних частиц тела, по которому бежит волна. Волна движется непрерывно, а частицы тела – импульсивно (шагообразно), причем за один пробег волны каждая частица совершает один шаг в одном направлении. Все частицы движутся разновременно – старт и остановка их происходят в различные моменты времени. Таким образом, каждая частица тела, по которому бежит волна, совершает шаговое движение.
Именно то, что не все частицы тела совершают перемещение одновременно, является характерной чертой волновых движений на теле. Тело в целом за один пробег волны от одного его конца до другого перемещает себя как бы «по частям». При этом на движущемся теле всегда есть неподвижные участки значительной длины, за счет которых снижается мощность, необходимая для передвижения.
Понятие «бегущая волна деформации» помогает объяснить еще одно биомеханическое явление – перистальтическое движение или движение вязких жидкостей и смесей в эластичных трубопроводах, стенки которых подвержены волновой деформации. Известно, что такой перенос – важнейший биомеханический процесс пищеварительной системы человека и животных. Являясь надежным «насосом без клапанов», он с инженерной точки зрения представляет собой совершенное транспортно-механическое устройство.
Перистальтический трубопровод, как и тело дождевого червя, можно рассматривать как деформируемое тело, по которому движутся вынужденные волны деформации сокращения и удлинения. При этом не происходит переноса частиц трубопровода. Часть сечений трубопровода сжимается, уменьшая площадь сечения, а часть последующих сечений расширяется. Этот процесс последовательно перемещается по трубопроводу, образуя движущуюся волну.
Частицы перемещаемого тела (жидкости) совершают последовательный процесс небольших продольных смещений в одном направлении, причем выпуклая волна, где трубопровод расширен, переносит большую часть жидкости по ходу своего движения, а вогнутая, где трубопровод сужен – в противоположном направлении, т.е. часть тела (жидкости) немного выдавливается назад. Таким образом, происходит постепенное перемещение всего транспортируемого тела в перистальтическом трубопроводе.
2. Теоретический расчет звена трубопровода
2.1. Основной конструктивный элемент трубопровода
В качестве основного функционального движущего элемента (звена) для реализации перистальтического принципа работы трубопровода, предлагается использовать конструкцию, имеющую вид гиперболоида с изменяемыми геометрическими параметрами.
Для наших целей наилучшим образом подходит однополосный гиперболоид. Общий вид этого частного случая гиперболоида показан на рис. 2.

Рис. 2.
Однополосный гиперболоид – это поверхность, которая в прямоугольной системе координат описывается следующим формулой:
![]() , (1)
, (1)
где a и b – действительные полуоси, c – мнимая полуось.
Это уравнение называется каноническим уравнением однополосного гиперболоида.
Мы рассматриваем гиперболоид вращения, у которого a и b в уравнении (1) равны между собой и равны радиусу окружности в горловине, a = b = r.
Общим свойством гиперболоидов является наличие семейства прямолинейных образующих, каждая из которых целиком лежит на поверхности. На рис. 3 показано одно из семейств этих прямых.

Рис. 3.
Именно это свойство поверхности можно использовать при изготовлении гиперболоида вращения. (Например, выдающийся инженер В.Г.Шухов построил Шаболовскую радиовышку, используя сетчатые конструкции в форме гиперболоидов, изготовленных из прямых стержневых элементов).
Чтобы получить гиперболоид мы будем использовать цилиндрическую конструкцию, похожую на «беличье колесо». Оно представляет собой два кольца, соединенных между собой параллельными стержнями. В нашем случае стержни крепятся к кольцам шарнирно, что позволяет менять форму конструкции. В исходном состоянии стержневые образующие вертикальны. При закручивании колец относительно друг друга по оси цилиндра, стержни, оставаясь прямыми, поворачиваются таким образом, что цилиндр превращается в гиперболоид, изображенный на рис. 3.
2.2. Определение основных расчетных параметров однополосного гиперболоида
Для гиперболоида с произвольными параметрами определим зависимость его геометрических размеров от угла закручивания колец.
В нашем случае образующие гиперболоида отличаются друг от друга только начальным расположением, т.е. начальной круговой координатой. Т.к. при повороте колец все образующие движутся синхронно и по одинаковым законам, то для расчета основных геометрических размеров звена нам достаточно описать поведение только одной из образующих.
Рассмотрим рис. 4:
· OA = OB = R0 – радиус колец, к которым крепятся образующие;
· NK – образующая, длиною L0, в начальном положении;
· BN – положение образующей после поворота;
· DN – проекция образующей на плоскость, перпендикулярную оси OX;
· CN – проекция образующей на плоскость, перпендикулярную оси OY;
· AB – проекция образующей на плоскость, перпендикулярную оси OZ;
· jх(j) – угол поворота образующей относительно оси OX;
· jy(j) – угол поворота образующей относительно оси OY;
· jz(j) – угол поворота образующей относительно оси OZ.

Рис. 4.
Наша задача определить следующие величины:
1. Углы поворота образующих относительно осей: jх(j), jy(j), jz(j);
2. Изменение расстояния между кольцами: DL(j) = L0 - L(j), где L(j) – высота гиперболоида в зависимости от угла j;
3. Радиус горловины гиперболоида – r0(j);
4. Изменение внутреннего объема гиперболоида: DV(j) = V0 - V(j), где V0 = pR02L0 – объем цилиндра, V(j) – объем гиперболоида при угле закручивания j.
Рассмотрим вертикальную образующую NK (рис. 4), имеющую следующие начальные координаты точки N: x=R0, у=0, z=0.
При закручивании верхнего кольца координаты начала образующей NK не меняются, а изменяются только углы наклона.
Из рисунка видно, что углы поворота образующей вокруг соответствующих осей можно определить, рассмотрев проекции треугольника NAB на плоскости, перпендикулярные этим осям.
Предварительно выразим длины отрезков, необходимых для дальнейших вычислений (АВ, BC, AC, ND и NC) через L0, R0 и j.
В треугольнике OBC:
BC=R0 sinj,
OC=R0 cosj
AC=R0 (1-cosj).
Определим ND в прямоугольном треугольнике NDB:
BD=AC=R0 (1-cosj),
тогда по теореме Пифагора:
![]()
Определим NC в прямоугольном треугольнике NBC:
![]()
Теперь определим углы jх(j), jy(j), jz(j).
В треугольнике NAD:
AD=BC=ND sinjх,
т.к. AD=BC, то

В треугольнике NAC:
AC=NC sinjy
тогда
В треугольнике ABD:
BD=AD tgjz,
т.к. BD=AC, то
![]()
На рис. 5 показана проекция образующей в наклоненном состоянии на плоскость, перпендикулярную оси OZ.

Рис. 5.
В равнобедренном треугольнике OAB:
![]()
Высота ОН, опущенная на сторону AB вычисляется по формуле:
![]()
Определим зависимость изменения расстояния между кольцами гиперболоида от угла закручивания j .
DL(j) = L0 - L(j),
Т.к. в треугольнике ABN (рис. 4):
![]()
то есть
![]() , (2)
, (2)
тогда
 (3)
(3)
Проанализируем формулу (3).
Т.к. DL(j) не может быть больше L0, а угол закручивания j не может быть больше 1800, то:
а) если j =1800 , а 2R0=L0 , то гиперболоид теоретически сложится в плоскость, тогда
б) если 2R0>L0 угла закручивания j <1800 , при этом всегда r0(j)>0, т.е. отверстие никогда полностью не перекроется,
в) если 2R0<L0 , то при угле закручивания j =1800 , полностью перекроется отверстие, а гиперболоид превратится в двойной конус.
Радиус горловины гиперболоида равен отрезку OH на рис. 5, т.е.
![]() (4)
(4)
На основании полученных зависимостей (3) и (4) можно сделать вывод, что радиус узкой части гиперболоида (горловины) зависит от угла закручивания колец. Чем больше угол закручивания, тем меньше диаметр горловины. Существует такой угол закручивания, при котором гиперболоид превратится в двойной конус. Теоретически это должно произойти при j = p (1800). Таким образом, меняя угол закручивания колец можно изменять форму конструкции от цилиндрической, когда j = 0, до почти конической, при j = jmax и L0<2R0. Это свойство мы будем использовать в нашей конструкции основного рабочего элемента трубопровода.
При разработке трубопровода полезно знать, на сколько уменьшится объем гиперболоида при закручивании колец на угол j, т.е. какой объем транспортируемого материала будет выдавлен за один цикл.
При вычислении DV на время забудем о том, что геометрические размеры гиперболоида зависят от угла j, тогда
DV = V0 – V,
где V0 = pR02L0 – объем цилиндра (исходного состояния элемента конструкции), V – объем гиперболоида при данном угле закручивания j.
Т.к. однополостный гиперболоид симметричен относительно плоскости XOY (рис. 6.), то достаточно вычислить объем его половины и удвоить результат.
 , (5)
, (5)
где S(z) – площадь сечения гиперболоида в сечении z (рис. 6).

Рис. 6.
Т.к. мы рассматриваем гиперболоид, у которого любое сечение, перпендикулярное оси OZ являются окружностями, то в каноническое уравнение (1), с учетом a=b=r0, можно представить в виде:

Обозначив через ![]() , получаем уравнение окружность с радиусом R в сечении z: x2 + y2 = R2, тогда
, получаем уравнение окружность с радиусом R в сечении z: x2 + y2 = R2, тогда

Подставляя это выражение в (5), получаем

и после интегрирования и преобразования получаем:

Для вычисления r0 и L используем формулы (4) и (2).
Для определения с подставим в каноническое уравнение гиперболоида (1) координаты одной из точек, положение которой известно, например тачка A на рис. 6 с координатами: x = R0, y = 0, z = L/2. С учетом a=b=r0, получим:
![]() ,
,
или
 (6)
(6)
Поскольку r0 и L зависят от угла закручивания j, то и с также является функцией угла j.
Таким образом, формула изменения объема гиперболоида в зависимости от угла закручивания выглядит так:
![]() , (7)
, (7)
где r0, L и c – определяются по формулам (4), (2) и (6) соответственно.
2.3. Программа расчета
Для вычисления всех рассчитанных параметров была составлена программа на Microsoft Visual BASIC 6.0.
В программе предусмотрена возможность изменения начальных размеров исходной цилиндрической формы, т.е. задаются значения начальной длины (L0) и диаметр торцевых колец (2R0).
Изменение угла закручивания j торцевых колец задается с помощью полосы прокрутки с выводом значений в отдельном поле.
В результате использования программы рассчитываются и выводятся на экран следующие параметры гиперболоида (в зависимости от значения угла закручивания j ):
1. Изменения длины гиперболоида: DL;
2. Диаметр горловины гиперболоида: D=2r0(j);
3. Изменения объема гиперболоида: DV
4. Углы наклона одной из образующих (с координатами: x = R0, y = 0, z = 0, jх =jy =jz =0): – jх1, jy1, jz1, которые в дальнейшем используются при создании мультипликационной модели трубопровода для задания закона движения образующих.
Рассчитанные значения выводятся в отдельных полях для каждого параметра в динамическом режиме при изменении угла j.
3. Конструкция, устройство и алгоритм работы трубопровода
1.1. Конструкция и устройство трубопровода
Конструктивно трубопровод предлагается выполнить из множества звеньев («беличьих колес»), последовательно соединенных друг с другом (рис. 7). Для упрощения конструкции промежуточные кольца будут принадлежать одновременно соседним звеньям, т.е. при повороте кольца меняют свое положение одновременно стержни двух звеньев.
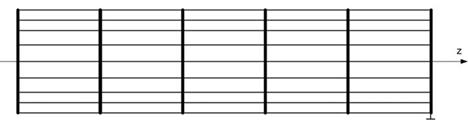
Рис. 7.
Закручивая кольца звеньев в определенной последовательности (определенном алгоритме) можно получить волновой процесс поперечных деформаций трубопровода.
Выбор алгоритма создания волн должен зависеть от назначения трубопровода. Например, для перемещения одного твердого тела (шарика), достаточно создать единичную волну от начала трубы до ее конца. А для транспортирования вязких жидкостей (тестообразных смесей и т.п.) целесообразно организовывать многоволновой процесс. При этом по трубе в одном направлении одновременно распространяется несколько волн, каждая из которых будет переносить небольшую часть жидкости.
Минимальная часть трубопровода (одна секция), в которой можно создать единичный волновой процесс, должна состоять не менее чем из трех звеньев.
В зависимости от назначения, трубопровод должен иметь конструктивные особенности.
1. Для транспортирования вязких (тестообразных) жидкостей внутренняя часть трубопровода должна быть изготовлена из тонкостенной эластичной герметичной трубы, прикрепленной изнутри к стержням.
Для перемещения, например, крупных твердых шарообразных тел, размеры которых соизмеримы с диаметром трубопровода, т.е. намного больше расстояния между спицами звеньев, наличие внутренней герметичной трубы может быть необязательным.
2. Геометрические параметры звеньев (соотношение диаметра и начальной длины) необходимо выбирать исходя из свойств транспортируемых материалов.
Так, для надежной транспортировки твердых предметов, типа шариков, соизмеримых с диаметром трубопровода, начальная длина нескрученного звена (L0), должна быть меньше диаметра (D0). Это соотношение дополнительно зависит от коэффициента трения поверхности трубы и перемещаемого тела.
Для вязких жидкостей важным критерием может оказаться величина минимально необходимого диаметра горловины гиперболоида, получаемого при максимальном угле закручивания колец звеньев.
3. В некоторых случаях, на эффективность работы решающее влияние может оказать коэффициент трения между поверхностью трубопровода и поверхностью перемещаемого материала. В этом случае необходимо предусмотреть применение материалов для изготовления покрытия стержней с минимальным коэффициентом трения с транспортируемыми веществами. В некоторых случаях возможно применение смазок.
1.2.Алгоритм создания волнового процесса
Рассмотрим алгоритм создания единичной волны в трубопроводе, состоящем из трех звеньев на примере перемещения шарообразного твердого предмета – шарика.
Вариант 1. (рис. 8.): Общая длина трубопровода L0 в процессе работы не должна меняться.
В этом случае крайние кольца A и D 3-звенной секции трубы считаем закрепленными (неподвижными). Промежуточные кольца звеньев B и C остаются свободными в осевом направлении, т.е. могут смещаться вдоль оси. При этом все кольца имеют возможность закручиваться относительно друг друга.
Начальное положение: одно из крайних звеньев (например, правое – 3) находится в «гиперболическом» состоянии, а остальные – в цилиндрическом. С левой стороны в трубопровод подается шарик в полость звена 1 (рис. 8, a).
Шаг 1. Кольца B и C синхронно поворачиваются (например, по часовой стрелке) таким образом, чтобы звено 3 распрямлялось, а звено 1 закручивалось в гиперболоид (рис. 8, b). При этом шарик начинает выдавливаться из звена 1 в звено 2. Процесс вращения продолжается до полного распрямления звена 1. При этом шарик почти полностью перемещается в полость звена 2, а кольца А и В немного сдвигаются на встречу шарику (рис. 8, с).

Рис. 8.
Шаг 2. Кольцо C фиксируется (закрепляется), а кольцо B начинает вращаться в противоположную сторону. Звено 1 начинает распрямляться, а звено 2 скручиваться в гиперболоид и выдавливать шарик вы сторону звена 3 (рис. 8, d). Процесс вращения продолжается до полного скручивания звена 2 (и распрямления звена 1). Шарик попадает в звено 3 (рис. 8, e).
Шаг 3. На следующем этапе повторяется предыдущий процесс: фиксируется кольцо B, поворачивается кольцо C, распрямляется звено 2, скручивается звено 3. Шарик выходит из трубы, а трубопровод возвращается в исходное положение (рис. 8, f).
Вариант 2: Отсутствует жесткое требование на изменение начальной общей длины трубопровода L0 в процессе работы.
В этом случае для того, чтобы зафиксировать трубопровод в пространстве, необходимо закрепить хотя бы одно сечение в осевом направлении. Пусть это будет сечение В правого конца трубы (рис. 9.).
Шарик подается с другого конца. Кольца звеньев, начиная с сечения А, последовательно начинают закручиваться таким образом, что скручивающееся звено проталкивает шарик и раскручивает предыдущее звено. Поворот последнего звена возвращает трубопровод к исходной длине. Но, при этом в целом трубопровод поворачивается на угол закручивания j каждого звена. Если нужно, чтобы трубопровод целиком поворачивался не более чем на этот угол j, необходимо, чтобы при создании следующей волны кольца звеньев поворачивались в противоположную сторону на тот же угол.

Рис. 9.
В зависимости от внешних условий и назначения трубопровода, его можно составлять из множества секций, работающих по одному из вариантов рассмотренных алгоритмов, а также из их комбинаций.
1.3.Компьютерная мультипликационная модель
Для визуальной иллюстрации алгоритма работы одной 3-звенной секции перистальтического трубопровода на основе гиперболоида была создана компьютерная мультипликационная модель с использованием пакета 3Ds-max.
Секция состоит из 4-х колец, и 36 стержней-образующих, по 12 для каждого звена. В качестве транспортируемого тела рассматривается шар, имеющий размеры, близкие к диаметру колец.
Поскольку в процессе движения каждый элемент меняет как линейные, так и угловые координаты, а также положение относительно друг друга, то пришлось прорисовывать закон (график) изменения каждой координаты каждого элемента.
Смоделирован 1-й рассмотренный выше вариант алгоритма работы, когда длина секции постоянна.
Нас рис. 10 представлены вид изображения мультипликационной модели на экране монитора в начальный момент времени.

Рис. 10.
2. Модель гиперболоида
Для наглядного изучения поведения однополостного гиперболоида при изменении угла закручивания торцевых колец и экспериментальной проверки полученных теоретических выводов была изготовлена модель с размерами R0=130 на L0=180 мм.
Модель изготовлена вручную, т.е. без использования точных токарных операций. В качестве торцевых колец используются два пластиковых диска. Вертикальные образующие изготовлены из отрезков алюминиевой проволоки в пластиковой оболочке. Шарниры крепления вертикальных стержней к дискам сделаны из той же проволоки в виде двух круглых петель с большим зазором (рис. 11).

Рис. 11.
Для того чтобы конструкция имела устойчивый вид, нижний диск закреплен на деревянном основании, а верхний, с помощью пружины крепится к Г-образной стойке. Такое крепление создает устойчивое положение конструкции, обеспечивает возможность закручивать верхний диск, а также «выбирает» зазоры в шарнирах.
В качестве измерительных приборов используется обычная линейка и штангенциркуль. Линейка крепится вертикально к Г-образной стойке и служит для измерения величины уменьшения длины гиперболоида при закручивании верхнего торцевого диска. С помощью штангенциркуля измеряется диаметр горловина гиперболоида.
Угол закручивания определяется по положению верхних точек крепления шарниров стержней относительно линейки. Угловой шаг точек крепления шарниров составляет около 22,5 град. Для экспериментальной проверки правильности расчетов этого вполне достаточно.
На рис. 12 представлены фотографии модели гиперболоида при различных углах закручивания. Наглядно видны этапы перехода цилиндрической формы в почти коническую.



Рис. 12.
Были проведены измерения длины гиперболоида (L) и диаметр горловины (D=2r0) при некоторых углах закручивания верхнего диска. Результаты измерений, а также расчетные значения, полученные с помощью программы, были занесены в таблицу 1. Изменение длины определялось по формуле:
DLопыт(j)=Lопыт(0)-Lопыт(j)
Таблица 1
|
Угол j, рад |
Lопыт., мм |
DLопыт., мм |
DLрасч., мм |
Погрешность, % |
Dопыт., мм |
D=2r0, мм |
Погрешность, % |
|
0 |
100 |
0 |
0 |
0 |
130 |
130 |
0 |
|
45 |
94 |
6 |
7 |
14 |
120 |
120 |
0 |
|
90 |
73 |
27 |
25 |
8 |
97 |
92 |
5,4 |
|
112,5 |
64 |
36 |
36 |
0 |
80 |
73 |
9,5 |
|
135 |
55 |
45 |
46 |
2 |
63 |
50 |
26 |
|
157 |
44 |
55 |
53 |
4 |
45 |
26 |
73 |
|
170 |
40 |
58 |
55 |
5 |
40 |
11 |
– |
Совпадение опытных и расчетных значений для L очень хорошее. Большая погрешность при j=45 град связан с измерением линейкой с точностью в 1 мм маленьких значений.
При измерении диаметра горловины погрешность начинает сильно увеличиваться при малых значениях диаметра, т.к. на измерения начинает оказывать влияние толщина проволоки (2,5 мм), из которой сделаны стержни, и большие углы наклона стержней.
Максимальный угол закручивания, на который можно повернуть верхний диск модели, оказался 170 град, хотя в теории он равен 180 град. Это связано с тем, что реальная конструкция в отличие от математической модели имеет стержни-образующие толщиной около 2,5мм. При угле около 170 град они упираются друг в друга и этим ограничивают дальнейшее скручивание.
Проверить изменения объема гиперболоида DV экспериментально на этой модели нельзя. Для этого нужно доработать модель таким образом, чтобы во внутреннюю полость можно было, например, заливать отмеренный объем воды, или засыпать известное количество песка.
Выводы
1. Произведен теоретический расчет основных параметров звена трубопровода перистальтического принципа действия на базе однополостного гиперболоида с переменными геометрическими характеристиками.
2. Составлена программа для определения основных параметров рабочего звена на базе гиперболоида.
3. Изготовлена модель гиперболоида с переменными характеристиками, на которой продемонстрирован принцип работы такого элемента и проверена правильность полученных расчетов и работа программы. С учетом точности использованных приборов удалось экспериментально подтвердить совпадение расчетных и опытных значений.
4. Схематически рассмотрена возможная реализация конструкции трубопровода на основе звена-гиперболоида. Предложены два варианта алгоритма создания волнового процесса в трубопроводе.
5. Создана компьютерная мультипликационная модель одного из вариантов алгоритма работы трубопровода.
6. При создании реальной конструкции необходимо будет решить ряд сложных конструкторских задач. Самой сложной задачей будет проектирование привода для поворота колец гиперболоидов на заданный угол, в определенном алгоритме.
Список литературы
1. Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся ВТУЗОВ. – М.: Наука, 1986. – 544 с.
2. Добролюбов А.И. Волновой перенос вещества. – М.: Изд-во УРСС. – Изд.2. – 2005. – 256 с.
3. Добролюбов А.И. Биомеханика – ключ ко многим дверям. – http://anomalia.narod.ru/text/864.htm)
4. Михеев А.Ю. Исследование характеристики и повышение надежности насосов перистальтического принципа действия / Автореферат диссертации на соискание ученой степени кандидата технических наук.– Уфа: 2004. – 24 с.
5. Ляшко И.И. и др. Справочное пособие по математическому анализу. – Киев: Изд. «Вища школа». – ч.1. – 1978. – 696 с.
6. Чумаченко И.Н. 3ds мах 6. – М.: НТ Пресс, 2005. – 538 с.
7. Гуревич Н., Гуревич О. Visual Basic 5: Освой самостоятельно: Пер. с англ. – М.: Бином, 1998. – 576 с.
Публикации с ключевыми словами: перильстатическое движение, трубопровод, однополостной гиперболоид, модель гиперболоида
Публикации со словами: перильстатическое движение, трубопровод, однополостной гиперболоид, модель гиперболоида
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||