научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
#6 июнь 2007
Милькова Нина Олеговна
лицей ╧ 17, г. Химки, 11 класс
Научный руководитель:
Зенкевич Станислав Леонидович,
доктор физико-математических наук,
профессор кафедры «Робототехнические системы»
МГТУ им. Н.Э.Баумана
Введение
Полезность роботов и робототехнических систем и, как следствие, быстро возрастающая их востребованность – явление сегодня общее. Проблемы мехатроники привлекают к себе все большее внимание ученых мира. Известно, что на переднем крае этой относительно молодой науки уже ведутся исследования, например, организации систем управления интеллектуальных мобильных роботов на базе многопроцессорных и нейропроцессорных структур. Изучаются формы поведения роботов в группах и коллективах, которые имеют отличия от поведения таких же одиночных устройств. Уже очевидно, что совершенствование роботов, а также технологий их создания влечет за собой не только качественное улучшение получаемых устройств, их количественное увеличение, но и постоянное расширение на этой основе спектра новых направлений в использовании роботов. Этой же цели могут служить компьютерные игры роботов.
Цель работы
Целью данной работы является создание базового алгоритмического и программного обеспечения игры, включающего:
• Вычисления траектории движения шайбы после удара (абсолютно упругого) и при отражении ее от бортов;
• Решение прямой и обратной задачи о положении плоского трехзвенного манипулятора;
• Нахождение области достижимости для трехзвенного манипулятора;
• Определение условий попадания шайбы в ворота;
• Определение необходимых условий для удара ракеткой манипулятора по шайбе;
• Нахождение координат шайбы в определенный момент времени для отражения ее ракеткой.
Содержание игры
Игра происходит на прямоугольном столе с бортами, в торцах которого расположены ворота. Участниками являются два плоских трехзвенных манипулятора. Задача играющих – забить как можно больше голов в ворота противника и как можно меньше пропустить в свои ворота. Удары по воротам могут быть прямые, под углом и рикошетные от борта (рис. 1).
Рис. 1.
На основе настоящей работы предполагается компьютерную модель воплотить в реальных роботах, где человек будет играть против реального манипулятора.
Управление манипуляторами осуществляется с помощью системы управления, которая имеет аппаратную и логическую структуры.
Структура системы управления
Аппаратная структура системы управления
Аппаратная структура системы управления представлена на рис. 2. В нее входят:
· блоки систем управления манипуляторами (для каждого свой);
· центральная система управления;
· камера технического зрения.
Камера технического зрения постоянно фиксирует процесс игры на поле и передает полученную информацию центральной системе управления. Центральная система управления передает эту информацию системам управления манипуляторами, которые на основе этой информации принимают решения и трансформируют их в команды для манипуляторов.

Рис. 2.
Логическая структура системы управления
Логическая структура системы управления представлена на рис. 3. Она включает в себя два уровня: моторный и стратегический.
Рис. 3
На стратегическом уровне обрабатывается информация, получаемая от СТЗ. Производятся вычисления целевой точки для манипулятора, определяется момент попадания ракетки манипулятора в данную точку.
Моторный уровень получает всю информацию от стратегического уровня и на ее основе управляет движением манипулятора.
Моя задача состояла в разработке программ и алгоритмов для моторного уровня. Для этого потребовалось решить две группы задач. Одна из них состоит в исследовании поведения шайбы. Прежде всего, необходимо было вычислить траекторию движения шайбы с учетом отражений ее от бортов.
Вычисление траектории движения шайбы с учетом отражений ее от бортов
Эти расчеты осуществлены методом построения (рис. 4).

Рис. 4.
По заданным начальным координатам шайбы и количеству отражений ее от бортов был найден угол, под которым нападающий манипулятор должен был ударить по шайбе, чтобы она после необходимого количества отражений попала в заданную точку. В это время защищающийся манипулятор решал обратную задачу.
Так выглядит решение прямой задачи.
Дано: a, b – стороны прямоугольника, (x0; y0) – начальные координаты шайбы, ![]() – количество отражений шайбы от бортов,
– количество отражений шайбы от бортов, ![]() .
.
Найти: ![]() .
.
Решение:
1. При ![]() соединим начальную и целевую точки.
соединим начальную и целевую точки.
![]()
2. При ![]() отсчитываем от прямоугольника с т. O
отсчитываем от прямоугольника с т. O ![]() прямоугольников. В
прямоугольников. В ![]() -ом прямоугольнике откладываем отрезок
-ом прямоугольнике откладываем отрезок ![]() от вертикальной стороны прямоугольника, ближайшей к начальному прямоугольнику. Обозначим найденную точку A. Соединим т. O и т. A.
от вертикальной стороны прямоугольника, ближайшей к начальному прямоугольнику. Обозначим найденную точку A. Соединим т. O и т. A.
![]()
3. При ![]() отсчитываем от прямоугольника с т. O
отсчитываем от прямоугольника с т. O ![]() прямоугольников. В
прямоугольников. В ![]() -ом прямоугольнике откладываем отрезок
-ом прямоугольнике откладываем отрезок ![]() от вертикальной стороны прямоугольника, ближайшей к начальному прямоугольнику. Обозначим найденную точку B. Соединим т. O и т. B.
от вертикальной стороны прямоугольника, ближайшей к начальному прямоугольнику. Обозначим найденную точку B. Соединим т. O и т. B.
![]()
Решение обратной задачи также выполнено методом построения.
Исследование движения шайбы включает в себя также определение скорости шайбы после ее удара об один из бортов или о ракетку.
Модель удара
Считая удары о ракетку и о борт абсолютно упругими (см. рис.5 и рис. 6) и в соответствии с [3], имеем удар о неподвижную ракетку:

Из приведенных формул видно, как при ударе шайбы о неподвижную ракетку изменяется направление скорости шайбы. При этом модуль ее скорости остается постоянным.
При ударе шайбы о разные борта изменяют знак соответствующие составляющие скорости. Удар шайбы о борт – это частный случай удара шайбы о неподвижную ракетку.
Вторая группа задач состоит в управлении манипулятором.
Рис. 5. Рис. 6.
Прямая и обратная задачи
Плоский трехзвенник выбран в качестве манипулятора, так как в этом случае ракетка может достичь произвольно заданной точки (принадлежащей области достижимости) с любой ориентацией.
Кинематическая схема манипулятора (рис. 7).

Рис. 7.
Решение прямой и обратной задачи о положении плоского трехзвенного манипулятора необходимо для управления им.
Решение прямой задачи при данных обобщенных координатах (![]() ) обеспечивает расчет координат концов звеньев манипулятора в его собственной системе координат, центр которой расположен в точке прикрепления манипулятора к столу.
) обеспечивает расчет координат концов звеньев манипулятора в его собственной системе координат, центр которой расположен в точке прикрепления манипулятора к столу.
Дано: ![]() .
.
Найти: ![]() .
.
Решение:
Из простых геометрических соображений (см. рис. 7) можно получить следующие соотношения:
1. ![]() (1)
(1)
![]() (2)
(2)
2. ![]() (3)
(3)
![]() (4)
(4)
3.![]() (5)
(5)
![]() (6)
(6)
![]() (7)
(7)
Решение обратной задачи по заданным координатам и углу (![]() ) в собственной системе координат манипулятора состоит в нахождении его обобщенных координат. Это позволяет осуществлять построение манипулятора и управлять им.
) в собственной системе координат манипулятора состоит в нахождении его обобщенных координат. Это позволяет осуществлять построение манипулятора и управлять им.
Дано: ![]()
Найти: ![]()
В соответствии с [1] имеем следующие соотношения:
 (8)
(8)
 (9)
(9)
![]() (10)
(10)
Обратная задача имеет два решения. Далее для определенности выбираем конфигурацию а (см. рис. 8).
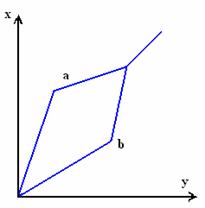
Рис. 8.
Планирование траектории манипулятора
Траектория манипулятора планируется так, чтобы конец его третьего звена плавно перемещался по прямой от начальной до целевой точки (см. рис. 9). Операции, обеспечивающие это, приведены в обобщенном виде.

Рис. 9.
хstart = xcur = 180.;ystart = ycur = 0.;phi0 = 0;
CalcBallPos(xcur, ycur, vBx,vBy, /*zone=*/-zone[random(2)], &xBfin, &yBfin, &tf);
Zero2(xBfin, yBfin, &xfin, &yfin);
tPath = tf;
path = sqrt((xcur-xfin)*(xcur-xfin)+(ycur-yfin)*(ycur-yfin));
tPath = tf;
vx = (xfin - xcur)/tPath;
vy = (yfin - ycur)/tPath;
phifin = phifin[random(2)];
omega = (phifin - phi0) / tPath;
Все точки траектории манипулятора должны принадлежать области достижимости.
Область достижимости
Область достижимости – это множество точек ![]() , для которых существует решение обратной задачи. Это множество потребуется в процессе планирования траектории ракетки. В силу соотношения (9) имеем
, для которых существует решение обратной задачи. Это множество потребуется в процессе планирования траектории ракетки. В силу соотношения (9) имеем

или после элементарных преобразований.
![]() (11)
(11)
Если выполняется соотношение (11), то выполняется условие  (из соотношения (8)).
(из соотношения (8)).
При фиксированном ![]() (т.е. в плоскости, параллельной
(т.е. в плоскости, параллельной ![]() ) область достижимости представляет собой кольцо с центром в точке
) область достижимости представляет собой кольцо с центром в точке ![]() , ограниченное внешней и внутренней окружностями с радиусами
, ограниченное внешней и внутренней окружностями с радиусами ![]() и
и ![]() соответственно (см. рис. 10).
соответственно (см. рис. 10).
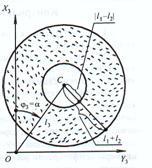
Рис. 10.
При изменении угла ![]() от 0 до
от 0 до![]() получается область достижимости, заключенная внутри кольца, центр которого перемещается по винтовой линии (см. рис. 11).
получается область достижимости, заключенная внутри кольца, центр которого перемещается по винтовой линии (см. рис. 11).
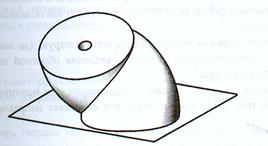
Рис. 11.
Используемые системы координат
В игре используются четыре системы координат (см. рис. 12). Две из них – собственные системы координат манипуляторов. Их центры расположены в точках крепления манипуляторов к столу. В программе эти системы координат обозначены как первая и вторая. Одна из двух оставшихся систем координат – абсолютная (нулевая); ее центр расположен в центре стола. В эту систему координат переводятся координаты манипуляторов из их собственных систем координат.
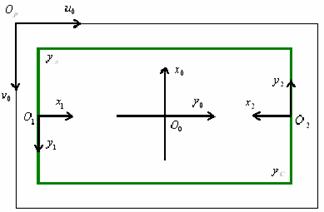
Рис. 12.
Перевод из первой в нулевую систему координат осуществляется с помощью следующей функции:
void One2Zero(float x,float y,float *px0,float *py0)
{
*px0 = -y;
*py0 = yA + x;
}
Перевод из второй в нулевую систему координат осуществляется с помощью следующей функции:
void Two2Zero(float x,float y,float *px0,float *py0)
{
*px0 = y;
*py0 = yC - x;
}
В нулевой системе координат задаются также координаты шайбы. Во всех этих системах координат значения длины измеряются в сантиметрах.
Четвертая система координат – пиксельная (компьютерная). Ее центр расположен в левом верхнем углу монитора. В эту систему переводятся координаты из нулевой системы координат:
void Cm2Pix(float x0,float y0,float* pu,float* pv)
{
*pu = u0 + scale * y0;
*pv = v0 - scale * x0;
}
Значения длины в этой системе координат измеряются в пикселях.
Работа манипуляторов
Работа самих манипуляторов циклична. Циклы их работы смещены один относительно другого во времени. Это отображено на схеме (см. рис. 13).
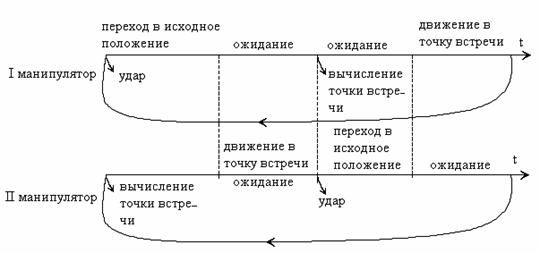
Рис. 13.
Произведя удар, первый манипулятор переходит в исходное положение и остается в состоянии ожидания. В момент удара, произведенного первым манипулятором, второй манипулятор вычисляет точку своей встречи с шайбой и пребывает в состоянии ожидания, время которого зависит от движения шайбы. Затем он перемещается в точку встречи с шайбой, после чего производит удар по шайбе и возвращается в исходное положение. В момент удара второго манипулятора по шайбе первый манипулятор пребывает в состоянии ожидания и вычисляет точку своей встречи с шайбой. Далее цикл повторяется.
Программное обеспечение
Программное обеспечение реализует все разработанные алгоритмы: моделирование в реальном времени движения шайбы с учетом отражения от бортов и ракетки, моделирование движения обоих манипуляторов, а также графическое отображение игры. Режим реального времени достигается за счет использования системных часов.
Заключение
В работе созданы алгоритмы моторного уровня систем управления манипуляторами. Разработаны также соответствующие программные средства, обеспечивающие моделирование игры, когда ее участниками являются два манипулятора.
Исследовано движение шайбы с учетом отражений от бортов, изучены методы решения прямой и обратной задачи кинематики для трехзвенного манипулятора.
В дальнейшем планируется создать алгоритмы для стратегического уровня.
Список литературы
1. Зенкевич С.Л., Ющенко А.С. Основы управления манипуляционными роботами. – М.: Издательство МГТУ имени Н.Э. Баумана, 2004.
2. Труды научной школы-конференции «Мобильные роботы и мехатроные системы». – М.: Издательство МГУ им. М.В. Ломоносова, 1999.
3. Павловский В.Е. Моделирование игры в виртуальный футбол. // Труды научной конференции «Мобильные роботы и мехатронные системы». – М.: Издательство МГТУ им. Н.Э. Баумана, 2000.
Публикации с ключевыми словами: система координат, траектория, мехатроника, робототехнические системы, блоки систем управления манипуляторами, центральная система управления, камера технического зрения
Публикации со словами: система координат, траектория, мехатроника, робототехнические системы, блоки систем управления манипуляторами, центральная система управления, камера технического зрения
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||