научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 11, ноябрь 2013
DOI: 10.7463/1113.0655037
УДК 62-531.7; 621.87
Российский университет дружбы народов, Москва
Известно, что при определенных условиях в металлоконструкциях роторных экскаваторов, землеройно-фрезерных и других технологических машин возникают процессы, связанные либо с резонансом, либо с автоколебаниями, обусловленными появлением положительных обратных связей между сопротивлением на рабочем органе и скоростью его колебательного движения [1], [2]. При этом колебания возрастают настолько, что работа машин в расчетных режимах становится невозможной, в результате чего существенно снижается производительность техники. Вопросы снижения колебаний металлоконструкций кранов также весьма актуальны [3], например, при погрузке и разгрузке судов в условиях морского волнения.
На основе обширных экспериментально-теоретических исследований идентифицированы динамические системы металлоконструкций экскаваторов и кранов [3], [4] и предложены их модели, которые можно использовать для синтеза колебательных систем с заданными частотными свойствами, обеспечивающими отсутствие резонансных соотношений. Но поскольку спектр собственных частот колебаний металлоконструкций весьма широк, то полностью избежать резонансных явлений, а тем более автоколебаний, практически не удается.
Решение указанной проблемы следует искать в активном демпфировании, когда в конструкцию вводится силовой орган, который создает демпфирующее воздействие на колебания [5], [6] в соответствии с заданным законом. При этом возникают вопросы синтеза демпфирующего воздействия и оценки эффективности гашения колебаний.
Существуют два подхода к решению указанных вопросов. Один из них основан на том, что динамическая система, снабженная активным устройством, рассматривается как объект автоматического управления движением исполнительного органа гасителя [7], [8], [9]. Другой подход, используемый в данной работе, базируется на том, что введением в динамическую систему активного гасителя можно целенаправленно изменять свойства системы: динамическую жесткость, собственные частоты, демпфирование [10]. Подобный подход прозрачен, логически прост и позволяет формировать закон демпфирующего воздействияисходя из физических соображений, например, из условия имитации внешнего вязкого сопротивления движению.
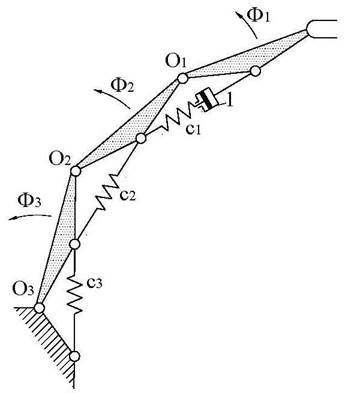
Вопрос об оценке эффективности активного демпфирования колебаний в многомассовых динамических системах металлоконструкций экскаваторов и стреловых кранов рассмотрен на примере двух видов трехмассовых колебательных систем (рисунок 1), с достаточной для практики точностью отражающих динамические процессы в экскаваторах и кранах [3], [4].
На рисунке 1 обозначено:
m1, m2, m3- сосредоточенные массы колеблющихся узлов;
c1, c2, c3 - жесткости упругих связей;
x1, x2, x3 - перемещения узлов при колебаниях;
F1, F2, F3 - угловые перемещения секций стрелы;
u- деформация упругого элемента под воздействием силового органа 1, например, гидроцилиндра.
Приведенные на рисунке 1 схемы используются для анализа динамических процессов в роторных экскаваторах, землеройно-фрезерных машинах, стреловых кранах, манипуляторах, подъемниках с шарнирно-сочлененными стрелами. Практически во всех случаях рабочий орган, являющийся источником возникновения колебаний (роторное колесо, фрезерная головка, технологический инструмент), устанавливается на концевой массе m1.
Из физических соображений следует, что силовой орган гасителя 1 (рисунок 1) следует располагать ближе к источнику вынуждающей силы, то есть в узле крепления концевой массы m1,последовательно с упругим элементомc1, а демпфирующее воздействие должно быть направлено противоположно скорости движения массы m1. Но поскольку это воздействие прикладывается не только к массе m1, но и к массе m2 (в качестве реактивной силы), то при уменьшении колебаний первой из указанных масс колебания остальных могут не уменьшаться.
Оценку эффективности применения различных законов демпфирующего воздействия, приложенного между двумя смежными массами, целесообразно проводить в сравнении с «идеальным» демпфированием, которое имело бы место при действии внешнего сопротивления движению массы m1, создаваемого, например, при помощи пассивного условного демпфера 2, соединенного с неподвижной опорой (рисунок 1,а).
а) | б) |
|
|
Рисунок 1- Расчетные схемы активно демпфируемых систем: а - при поступательном движении масс; б - при угловых перемещениях масс. 1 – силовой орган гасителя; 2 – условный пассивный демпфер внешнего сопротивления. | |

Ниже приводятся возможные варианты синтеза демпфирующего воздействия, обеспечивающего заданную степень снижения колебаний узлов металлоконструкций при силовом возбуждении, приложенном к рабочему органу, а также при возникновении автоколебаний.
Уравнения свободных колебаний динамической системы, снабженной активным гасителем 1 (рисунок 1,а), составленные на основе принципа Даламбера, имеют вид:
|
(1) |

(положительное значение u соответствует сжатию упругого элемента c1).
Уравнения колебаний динамической системы при действии на массу m1 только внешнего вязкого сопротивления, создаваемого условным пассивным демпфером 2 (рисунок 1,а):
| (2) |

где k1- коэффициент вязкого сопротивления.
Как известно [11], для одномассовой колебательной системы, содержащей массу m и упругий элемент c, справедливо следующее соотношение:
| (3) |
где: k - коэффициент вязкого сопротивления, соответствующий заданному значению логарифмического декремента колебаний δ, обеспечивающего требуемую степень демпфирования.
Эффективность демпфирования удобно оценивать, также, максимальным значением коэффициента динамичности K, равным отношению резонансной амплитуды колебаний объекта к его статическому смещению от амплитудного значения вынуждающей силы, приложенной к объекту. При этом для резонансных колебаний одномассовой системы справедливо соотношение: K = π/δ.
При демпфировании колебаний многомассовых систем требуемые значения коэффициентов вязкого сопротивления kj, обеспечивающих заданный уровень резонансных колебаний по каждой из j обобщенных координат, можно искать методом последовательных приближений, добиваясь получения заданных значений максимальных (резонансных) коэффициентов динамичности Kj, варьируя значениями kj. Например, чтобы для динамической системы, колебания которой описываются уравнениями (2), получить максимальный коэффициент динамичности по перемещению x1 при резонансе Kx1 = 1,5, необходимо принять k1 = 0,525 (рисунок 2,а и таблица).
Если в активно демпфируемой динамической системе, описываемой уравнениями (1), положить закон изменения деформации uв виде:
| (4) |
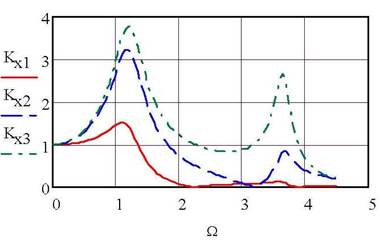
то для получения указанного выше значения Kx1 = 1,5 необходимо принять k1 = 2,6 (рисунок 2,б и таблица). При этом логарифмические декременты 1-й и 3-й форм колебаний составляют в рассматриваемом случае 1.349 и 0.20 соответственно, а движение по 2-й форме становится апериодическим, что наряду с графиками на рисунке 3 свидетельствует об устойчивости колебательного процесса.
а) | б) |
|
|
Рисунок 2- Амплитудно-частотные характеристики при демпфировании: а - с использованием внешнего вязкого сопротивления движению массы m1; б - с использованием закона (4). Kx1, Kx2, Kx3, - коэффициенты динамичности по амплитудам перемещений x1, x2, x3 соответственно; Ω - частота вынуждающей силы, приложенной к массе m1, отнесенная к низшей частоте колебаний системы без демпфирования. | |

Эффективность демпфирования приразличных законах воздействия на колебательную систему
Вид демпфирования
| Коэффициенты динамичности при резонансе по перемещениям | |||
Kx1 | Kx2 | Kx3 | ||
Внешним вязким сопротивлением (система уравнений (2)) при k1 = 0.525 | 1,51 | 1,75 | 2,01 | |
Демпфирующей силой, приложенной между смежными телами (система уравнений (1)) | Закон (4) при k1= 2.6 | 1,51 | 3,24 | 3,77 |
Закон (5) при k1 =1.9; k2= - 0.5; k3 = - 0.75 |
1,52 |
2,28 |
2,57 | |
Закон (5) при k1 =1.9; k2= - 0.5; k3 = - 0.75 и одновременном возбуждении автоколебаний с отрицательным декрементом d = – 0.47 |
2,13 |
3,14 |
3,54 | |
Приведенные результаты получены при следующих соотношениях: m1:m2 :m3 = 1; c1 :c2 :c3 = 1 | ||||
Следует отметить, что при практической реализации активного демпфирования на величину k1могут накладываться ограничения, обусловленные динамическими свойствами исполнительных устройств: инерционностью силового органа, частотными характеристиками измерительных и преобразовательных систем, их помехоустойчивостью, что необходимо учитывать при проектировании.
|
Рисунок 3 – Процесс затухания колебаний, вызванных начальными единичными смещениями масс, при демпфировании по закону (4). x1, x2, x3 - перемещения по координатам x1, x2, x3соответственно; n –время, отнесенное к периоду колебаний парциальной системы. |

Если по соображениям устойчивости возникает необходимость в уменьшении k1 без снижения эффективности демпфирования, то можно искать закон изменения демпфирующей силы в виде:
| (5) |
где k1,k2, k3 - соответственно коэффициенты передачи по виброскоростям масс m1, m2, m3, подбираемые по величине и знаку методом последовательных приближений, исходя из условия обеспечения заданного значения максимального коэффициента динамичности по перемещению Kx1 массы m1, несущей рабочий орган, с учетом ограничений по амплитудам колебаний остальных узлов металлоконструкций.
Как следует из приведенной таблицы, применение законов движения (4) и (5) при соответствующих значениях k1, k2, k3 дает такой же эффект демпфирования первой формы колебаний (первые пики кривых Kx1 на рисунках 2,а и 2,б), как при “идеальном” демпфировании внешним вязким сопротивлением.
Для варианта демпфирования по закону (5) рассмотрен случай, когда помимо вынуждающей силы, приложенной к массе m1, одновременно инициируются автоколебания узла конструкции, на котором установлен рабочий орган. Заданная интенсивность развития автоколебаний соответствует отрицательному логарифмическому декременту колебаний в парциальной системе δотр= - 0,47,что значительно превосходит реальные значения. Например, в металлоконструкциях роторных экскаваторов этот параметр по абсолютной величине не превышает 0,25. Динамическая система в рассмотренном случае сохраняет устойчивость (действительные части корней характеристического уравнения отрицательны), хотя максимальные коэффициенты динамичности несколько возрастают (нижняя строка таблицы) за счет необходимости компенсации дополнительного воздействия, возбуждающего автоколебания.
Следует также отметить, что последовательное соединение силового органа гасителя 1 и упругой связи c1 (рисунок 1) позволяет при кинематическом воздействии на конструкцию через основание снижать колебания концевой массы m1 с установленным на ней рабочим оборудованием, что также способствует стабилизации рабочего процесса машины. При этом высокочастотные гармоники воздействия отфильтровываются за счет податливости упругой связи c1, а низкочастотные составляющие подавляются силовым органом гасителя [11].
Выводы
Таким образом, размещение силового органа активного гасителя колебаний между узлом установки рабочего органа и конструкцией позволяет существенно улучшить динамические свойства рассматриваемых машин. Если расчетные значения коэффициентов демпфирования не выходят за пределы ограничений по устойчивости, то активное демпфирование колебаний, описываемых уравнениями (1) с использованием законов движения (4) и (5), не уступает по эффективности подавления низкочастотной гармоники “идеальному”, но практически не осуществимому, демпфированию с использованием внешнего сопротивления (2), приложенного к узлу установки рабочего органа.
Указанные выше выводы справедливы и для конструкций, выполненных по схеме, представленной на рисунке 1,б. При выборе в качестве обобщенных координат угловых перемещений секций F1, F2, F3 и в качестве силовых факторов моментов от инерционных и упругих сил относительно центров шарниров О1, О2, О3 уравнения колебаний подобных конструкций эквивалентны системам уравнений (1) и (2).
Список литературы
1. Гужовский В.В., Обухов Н.К., Репин В.Н. Борьба с шумом и вибрациями в горных машинах для открытых работ. М.: Недра, 1980. 152 с.
2. Густов Д.Ю. Режимы нагружения роторно-фрезерных экскаваторов при разработке сложноструктурных пород // Механизация строительства. 1998. № 3. С. 44-46.
3. Лобов Н.А. Динамика грузоподъемных кранов. М.: Машиностроение, 1987. 157 с.
4. Волков Д.П., Черкасов В.А. Динамика и прочность многоковшовых экскаваторов и отвалообразователей. М.: Машиностроение. 1969. 408 с.
5. Иносов С.В., Гужовский В.В., Чудутов Ю.В. Перспективы использования управляемых динамических виброгасителей для демпфирования колебаний металлоконструкций роторных экскаваторов // Статика и динамика машин: сб. науч. ст. Киев: Изд-во КИСИ, 1978. С. 12-14.
6. Гришин Д.К. Проблемы создания высокоэффективных средств снижения колебаний металлоконструкций машин для земляных и открытых горных работ // Строительные и дорожные машины. 1996. № 4. С. 33-34.
7. Елисеев С.В., Резник Ю.Н., Хоменко А.П. Мехатронные подходы в динамике механических колебательных систем. Новосибирск: Наука, 2011. 384 с.
8. Gallina P., Trevisani A. Delayed Reference Control of a Two-Mass Elastic System // Journal of Vibration and Control. 2004. Vol. 10, no. 1. P. 135-159. DOI: 10.1177/107754604036920
9. Кузнецов Н.К., Перелыгина А.Ю. Исследование эффективности управления колебаниями на основе трехмассовой расчетной схемы // Современные технологии. Системный анализ. Моделирование. 2008. № 1. С. 85-92.
10. Геллер Ю.А., Баландин О.А. Влияние упруго-инерционных свойств землеройных машин на динамическое гашение колебаний // Современные технологии. Системный анализ. Моделирование. 2012. № 2. С. 64-71.
11. Вибрации в технике: Справочник. В 6 т. Т. 6. Защита от вибрации и ударов / Под ред. К.В. Фролова. 2-е изд., испр. и доп. М.: Машиностроение, 1995 456 с.
Публикации с ключевыми словами: манипулятор, автоколебания, активное демпфирование колебаний, стреловой кран, роторный экскаватор
Публикации со словами: манипулятор, автоколебания, активное демпфирование колебаний, стреловой кран, роторный экскаватор
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||