научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 12, декабрь 2013
DOI: 10.7463/1213.0633253
УДК 629.783
Россия, МГТУ им. Н.Э. Баумана
Космические тросовые системы являются новым и перспективным средством космической техники. При подготовке экспериментов с целью их практического применения требуется анализ возможных нештатных ситуаций.
Наиболее общими случаями возникновения нештатных ситуаций являются разрыв и заклинивание троса, что выражается в скачкообразном изменении силы натяжения в тросе и, как следствие, изменение траектории движения концевых тел с опасностью их последующего сближения. В большинстве случаев непредвиденная ситуация заканчивается обрывом тросовой системы и взаимным удалением концевых тел (влияние градиента сил гравитации). В таком случае возможно аналитическое решение задачи движения тел при помощи уравнений орбитального движения без учёта наличия участков троса на концевых телах. В любой ситуации задача может быть решена путём численного моделирования.
Можно выделить следующие случаи нештатного проведения неуправляемого развёртывания:
· одновременное заклинивание троса в тракте выпуска и концевых демпферах*
· обрыв троса до выхода системы на полную длину
· обрыв троса в режиме либраций
*Примечание: в статьях [1] и [2] был сделан вывод о необходимости использования в конструкции концевых тел демпферов, которые бы гасили радиальную составляющую скорости движения концевых тел без возникновения скачков силы натяжения. Для исключения рывка при натяжении троса концевые демпферы используются в тросовой системе, рассматриваемой в данной статье.
Численное и аналитическое моделирование выполнено для тросовой системы длиной 6000 м, центр масс которой располагается на высоте 400 км. Концевые тела имеют массу 25 и 6000 кг и демпферы сухого трения с усилием выпуска демпфирующего троса 1Н и запасом троса на каждом теле – 500 м. Номинальная сила сопротивления выпуску троса 0,1 Н. Предел прочности на разрыв – 250 Н. Развёртывание производится под углом 10º к местной вертикали в направлении, противоположном орбитальному движению (см. Рис. 1).

Рис. 1: Разделение концевых тел в заданном направлении с заданной начальной скоростью
Во всех случаях, где изучается длительное орбитальное движение, рассмотрен промежуток времени, соответствующий 108 виткам центра масс системы (примерно 7 суток орбитального полёта).
Одновременное заклинивание троса в тракте выпуска и концевых демпферах
Рассмотрим заклинивание троса в системе выпуска. Как показало моделирование данной ситуации, при наличии работоспособных демпферов трения происходит выпуск дополнительных 1000 м из запаса демпфирующего троса, что значительно снижает радиальную скорость тел. В результате рывок при выходе на полную длину оказывается слабым и связка переходит в режим маятниковых колебаний. Данный случай становится опасным, если происходит выход из строя концевых демпферов трения [8], [9]. Демпфер выпускает дополнительный участок троса в том случае, если сила натяжения троса превышает силу выпуска троса. В случае выхода из строя в демпфере возникает большая сила сопротивления выпуску троса. В такой постановке возможны два возможных случая:
- сила сопротивления превышает разрывную прочность троса;
- сила сопротивления не превышает разрывную прочность троса.
В случае превышения силой натяжения тросовой системы разрывной прочности троса происходит его обрыв, и концевое тело становится свободно движущимся объектом. Данная задача подобна решаемой ниже при обрыве троса до выхода системы на полную длину. Является наиболее опасной, когда на концевом теле остаётся участок троса максимальной длины (равной номинальной длине тросовой системы), так как в этом случае повышается вероятность столкновения участка троса с другими космическими телами. Как демонстрирует приведённое далее решение при заданных условиях эта ситуация не создаёт опасности столкновения концевого тела или участка троса с другим концевым телом в течение длительного времени.
В случае, если сила сопротивления не превышает предела прочности, но является близкой к нему величиной, то возникает сильный отскок концевого тела. Моделирование ситуации показало, что минимальная длина троса, при которой может произойти заклинивание без обрыва, равна 48 м.
После остановки процесса развёртывания, получившаяся тросовая система переходит в режим многократных отскоков концевого тела [6], [7] со сближением на минимальное расстояние до 6 м, что может привести к столкновению. Такая нештатная ситуация является опасной и представляет угрозу столкновения концевых тел.
Для предотвращения такого развития событий предлагается ввести в конструкцию троса участок с заданной силой разрыва. Значение этой силы не должно быть меньше силы натяжения в тросовой системе, возникающей после её развёртывания на полную длину, в том числе, при поломке демпферов, поскольку такое развёртывание может быть признано частично успешным. Величину такой силы предлагается принять равной 50 Н, так как максимальная сила натяжения, полученная в результате моделирования представленной в примере тросовой системы, равна 41,53 Н.
В случае использования такого участка, возникающая при обрыве ситуация, подобна задаче движения концевого тела при обрыве троса до его выхода на полную длину. Как будет показано далее, эта ситуация не представляет опасности столкновения в течение длительного времени.
Рассмотрим ситуацию, при которой в системе выпуска троса возникнет повышенная сила сопротивления величиной 49 Н, что не приведёт к обрыву тарируемого участка троса. В таком случае произойдёт раннее торможение развёртывания. Как показывает численное моделирование, в данном случае будет развёрнуто 2 км, после чего связка стабилизируется и перейдёт в режим либраций. За 10 витков переходного процесса минимальное расстояние составит 111 м (Рис. 2).

Рис. 2: Расстояние между концевыми телами при движении тросовой системы после заклинивания
Обрыв троса до выхода системы на полную длину
В данном случае сила натяжения в тросовой системе ещё не возникла, поэтому концевые тела, движутся независимо. Следовательно, независимо от места разрыва на тросе дальнейшее движение концевых тел можно рассмотреть, решив задачу баллистики после придания импульса m1ΔV1 под начальным углом развёртывания ![]() к местной вертикали (Рис. 1).
к местной вертикали (Рис. 1).
В начальный момент времени оба концевых тела находятся на круговой орбите высотой R0, движутся с орбитальной скоростью  и дополнительно им придаётся скорость под углом
и дополнительно им придаётся скорость под углом ![]() к радиальному направлению: для нижнего концевого тела массой
к радиальному направлению: для нижнего концевого тела массой ![]() скорость
скорость ![]() , а для верхнего тела массой
, а для верхнего тела массой ![]() по закону сохранения импульса:
по закону сохранения импульса:  .
.
Модули векторов скорости в данном случае будут равны:
![]() ;
;
![]() .
.
Найдём значения угла бросания ![]() и
и ![]() для концевых тел после обрыва связки. Из треугольников скоростей (Рис. 1) имеем:
для концевых тел после обрыва связки. Из треугольников скоростей (Рис. 1) имеем:
 ;
;  . (1)
. (1)
Таким образом, известны положение концевых тел в момент обрыва в системе и векторы скорости движения. Запишем Кеплеровы уравнения орбитального движения концевых тел, как функции угла отклонения тросовой системы:
 ;
;  . (2)
. (2)
где ![]() и
и ![]() - положение точек перицентров орбит движения концевых тел относительно орбитальной подвижной системы координат при разделении. Связано с наличием радиальной составляющей скорости движения концевых тел в момент разделения и разностью величин этих скоростей.
- положение точек перицентров орбит движения концевых тел относительно орбитальной подвижной системы координат при разделении. Связано с наличием радиальной составляющей скорости движения концевых тел в момент разделения и разностью величин этих скоростей.
![]() ;
; ![]() ;
;
 ;
;  ;
; ;
;
 ;
;  ;
;  - Кеплеровы параметры орбит концевых тел.
- Кеплеровы параметры орбит концевых тел.
Для рассмотрения задачи одновременного движения тел после разделения, найдём зависимость ![]() ,
, ![]() .
.
Зависимость истинной аномалии от времени можно найти через значения эксцентрической и средней аномалий. Связь эксцентриситетной и средней аномалии определяется выражением [3], [4]:
![]() (3)
(3)
Решим уравнение относительно эксцентриситетной аномалии методом разложения функции в степенной ряд [3], [11], [12]:
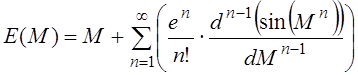 (4)
(4)
Найдём зависимость средней аномалии от времени. По определению, средняя аномалия - это угол, на который повернётся радиус-вектор тела, движущегося по орбите в том случае, если бы тело двигалось равномерно с угловой скоростью  , называемой средним движением [4], [13], [14]:
, называемой средним движением [4], [13], [14]:
![]() ;
; ![]() , (5)
, (5)
где  и
и  ,
, ![]() и
и ![]() - большие полуоси орбит концевых тел.
- большие полуоси орбит концевых тел.
Найдём связь между эксцентриситетной и истинной аномалиями.
При выводе выражения (3) использовалась замена:  [3],
[3],
Откуда получим:
 ; (6)
; (6)
 .
.
Очевидно, что в момент времени t=0, M(t)=0 => ![]() ;
; ![]() .
.
Подставляя (4), (5), (6) в выражения (2), получим зависимость положения концевых тел после обрыва тросовой системы на орбите от времени.
Расстояние между концевыми телами в любой момент времени равно:
![]()
![]() .
.
При обрыве связки самым опасным случаем является тот, при котором на концевых телах (теле) остаётся наибольшая длина нити и возникает опасность её сцепления с другим концевым телом из-за увеличения минимального расстояния, на которое они могут сблизиться.
Как было сказано в начале статьи, начальный угол направления разделения связки ![]() =10°, максимальное время рассмотрения ситуации не превышает 7 суток. Как показало аналитическое решение, опасное сближение концевых тел невозможно. Минимальное расстояние между телами равно расстоянию в момент отделения, в последующие сближения оно превышает 70 км, что существенно больше длины рассматриваемого в примере троса.
=10°, максимальное время рассмотрения ситуации не превышает 7 суток. Как показало аналитическое решение, опасное сближение концевых тел невозможно. Минимальное расстояние между телами равно расстоянию в момент отделения, в последующие сближения оно превышает 70 км, что существенно больше длины рассматриваемого в примере троса.
Обрыв троса в режиме либраций
Рассмотрим случай нештатного обрыва уже развёрнутой тросовой системы.
В начальный момент времени на круговой орбите высотой R находится развёрнутая тросовая связка длиной L в режиме маятниковых колебаний (либраций) с угловой амплитудой ![]() (см. Рис. 3). На концах связки находятся концевые тела массами m1 и m2; расстояние от центра масс до концевых тел равно
(см. Рис. 3). На концах связки находятся концевые тела массами m1 и m2; расстояние от центра масс до концевых тел равно ![]() и
и ![]() . В некоторый момент времени, при угле отклонения тросовой связки от местной вертикали
. В некоторый момент времени, при угле отклонения тросовой связки от местной вертикали ![]() , происходит обрыв тросовой системы в произвольной точке на тросе. Для решения задачи баллистики концевых тел после обрыва связи необходимо знать радиусы-векторы, а также векторы скоростей концевых тел после разделения. Данные о скоростях можно получить из рассмотрения динамики либрационного движения космической тросовой связки или из результатов численного моделирования движения тросовой системы.
, происходит обрыв тросовой системы в произвольной точке на тросе. Для решения задачи баллистики концевых тел после обрыва связи необходимо знать радиусы-векторы, а также векторы скоростей концевых тел после разделения. Данные о скоростях можно получить из рассмотрения динамики либрационного движения космической тросовой связки или из результатов численного моделирования движения тросовой системы.
Рис.3: Обрыв тросовой системы в режиме либраций
Расстояние до концевых тел в момент обрыва определяется выражениями:
![]() ;
; ![]() .
.
Дальнейшая методика получения уравнений орбитального движения концевых тел, аналогична рассмотренным выше.
Кроме того, необходимо найти вектора скорости движения концевых тел в момент обрыва.
Углы бросания концевых тел определяются по формуле (1) (Рис. 3):
 ;
;
 .
.
Из аналитического решения задачи колебаний тросовой связки в постановке твёрдого стержня [5], [10] имеем зависимости скорости движения концевых тел от текущего отклонения (Рис. 4). Один из графиков показывает изменение скорости движения при движении нижнего концевого тела по направлению орбитального движения связки, а другой – против. На графиках также нанесены орбитальная круговая скорость центра масс системы и круговая орбитальная скорость для текущей высоты концевого тела. Как можно заметить, при колебаниях концевых тел по направлению орбитального движения скорость превышает орбитальную круговую, а при колебаниях против направления орбитального движения имеет меньшее значение.
Рис. 4: Зависимость скорости начального движения нижнего концевого тела от угла отклонения при обрыве в режиме либраций.
Расстояние между концевыми телами в любой момент времени равно:
![]()
На рис. 5 представлена поверхность изменения во времени расстояния между концевыми телами за 100 витков верхнего концевого тела при разных углах отклонения тросовой системы в момент обрыва. Очевидно, что столкновение или пересечение конца троса на одном из тел с другим телом невозможно после разрушения связи между концевыми телами.

Рис. 5: Зависимость расстояния между концевыми телами от времени и угла отклонения тросовой системы в момент обрыва
Программное моделирование данной задачи с учётом массы троса, его растяжимости, изменения формы и наличия концевых тел, а также учёта факторов космического полёта подтверждает в целом полученные результаты. Расстояние между образовавшимися объектами в течении длительного времени существенно больше нуля. На рис. 6 представлено сравнение изменений расстояния между концевыми телами в самом опасном случае при обрыве тросовой связки от времени, при угле разделения 0° в момент прохождения положения равновесия в направлении орбитального движения. Сравнивая результаты, полученные численно и аналитически, можно увидеть, что они достаточно точно сходятся. Это значит, что полученная методика решения задачи движения концевых тел после разделения может быть использована с учётом сделанных допущений о невесомости троса, отсутствии аэродинамических сил воздействия и учёта несферичности Земли.

Рис. 6: Зависимость расстояния между концевыми телами от времени за 108 витков орбитального движения
Однако такой способ исследования не позволяет провести анализ изменения формы троса после обрыва. А также не позволяет выяснить особенности движения концевых тел. На рис. 7 показаны формы тросовой системы, образовавшейся после обрыва в системе координат, связанной с верхним концевым телом, полученные с помощью численного решения.

Рис. 7: Форма и движение тросовой системы после обрыва, в системе координат, связанной с верхним концевым телом
Рассмотренные в статье нештатные ситуации при внесении конструктивных дополнений, (добавление участка троса с тарируемой силой разрыва) не приводят к столкновению концевых тел тросовой системы при ее развертывании и орбитальном полете. Кроме того, разработанная методика расчёта орбитального движения позволяет оценить траектории движения концевых тел после отделения в течение длительного промежутка времени.
Список литературы
1. Коровин В.В., Попов А.В., Усюкин В.И. Динамика неуправляемого развертывания космической тросовой связки // Вестник МГТУ им. Н.Э. Баумана. Сер. Машиностроение. 2012. Спец. вып. С. 33-40.
2. Коровин В.В., Попов А.В., Усюкин В.И. Кватернионные параметры Родрига-Гамильтона в модели космической тросовой связки // Вестник МГТУ им. Н.Э. Баумана. Сер. Машиностроение. 2012. Спец. вып. С. 41-48.
3. Лукьянов Л.Г., Ширмин Г.И. Лекции по небесной механике: учеб. пособ. для вузов. Алматы: Эверо, 2009. 277 с.
4. Солодов А. В. Инженерный справочник по космической технике. М.: Воениздат, 1969. С. 87-92.
5. Шаргоровский С.А., Темнов А.Н. Траектории неуправляемого зонда с демпфирующим тросом // Инженерно-физический журнал. 2000. Т. 73, № 1. С. 86-89.
6. Иванов В.А., Ситарский Ю.С. Динамика полета системы гибко связанных космических объектов. М.: Машиностроение, 1986. 248 c.
7. Белецкий В.В., Левин Е.М. Динамика космических тросовых систем. М.: Наука, 1990. 336 с.
8. Bekey I. Tethers open new space options // Astronautics and Aeronautics. 1983. Vol. 21, no. 4. P. 32-40.
9. Bekey I. Applications of space tethers // Proc. of the 35th Int. Astronautical Congr. (Lausanne, Switzerland, 7-13 October 1984). Paper No. 84-436.
10. Carroll J.A. Tether application in space transportation // Astra Astronautica. 1986. Vol.13, no. 4. P. 165-174.
11. Tethers in space handbook / M.L. Cosmo, E.C. Lorenzini, eds. 3rd ed. Smithsonian Astrophysical Observatory, December 1997.
12. Феоктистов К.П. Космическая техника. Перспективы развития. М.: Изд-во МГТУ им. Н.Э. Баумана, 1997. 172 с.
13. Усюкин В.И. Строительная механика конструкций космической техники: учебник для студентов втузов. М.: Машиностроение, 1988. 392 с.
14. Светлицкий В.А. Механика гибких стержней и нитей. М.: Машиностроение. 1978. 221 с.
Публикации с ключевыми словами: космическая тросовая система, разрыв тросовой системы, нештатные ситуации
Публикации со словами: космическая тросовая система, разрыв тросовой системы, нештатные ситуации
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||