научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 06, июнь 2013
DOI: 10.7463/0613.0574243
УДК 519.6
Физический институт им. П.Н. Лебедева РАН (ФИАН). Астрокосмический центр
Институт машиноведения им. А.А. Благонравова РАН (ИМАШ РАН)
Работа является четвертой и последней в серии публикаций, посвященных синтезу механизмов ориентации космического телескопа «Миллиметрон» [1-3].
В работе показаны проблемы обеспечения сверхточной геометрии раскрываемого на орбите космического радиотелескопа «Миллиметрон» и его высокоточного наведения на наблюдаемый объект, обусловленные сверхвысокой чувствительностью телескопа и его работой в условиях глубокого вакуума и сверхнизких температур. Представлена концепция построения интеллектуальной системы активной виброзащиты и высокоточного наведения телескопа «Миллиметрон», направленная на решение указанных проблем.
4.1. Общие проблемы виброзащиты телескопа «Миллимитрон»
Высокие требования по точности и надежности функционирования механических систем при сверхнизких температурах и колоссальном удалении от Земли ставят перед разработчиками ряд проблем, для решения которых требуется разработка новых эффективных концептуальных решений, основанных на применении интеллектуальных систем, способных длительно и автономно функционировать в экстремальных условиях.
Одной из таких проблем является проблема гравитационной и инерциальной чувствительности. Среди многообразия космических гравитационно- и инерциально-чувствительных систем, приведенных в работе [4], отмечены также крупногабаритные космические конструкции и их элементы (космические радио‑ и оптические телескопы, антенны СВЧ связи и радиолокационных систем, радиометры, рефлекторы гелиоконцентраторов, платформы, панели солнечных батарей, штанги и др.). Под гравитационно-инерциальной чувствительностью космических систем понимаем недопустимое изменение их тактико-технических характеристик в орбитальном полете под влиянием внешних и внутренних микродинамических воздействий (рисунок 4.1) гравитационного и инерционного происхождения [4-7].

Рисунок 4.1 ‑ Классификация микродинамических воздействий на КА с орбитой вокруг антисолнечной точки Лагранжа 2
Гравитационно-инерциальная чувствительность крупногабаритных космических систем обусловлена недостаточной жесткостью протяженных элементов их конструкций в рабочем положении, с одной стороны, и высокими требованиями к точности геометрических параметров – с другой.
Под действием инерционных нагрузок, вызванных микродинамическими воздействиями внешних и внутренних возмущающих факторов, а также за счет сил упругости, протяженные формообразующие элементы конструкции приходят в колебательное движение, которое приводит к снижению их геометрической точности и формостабильности и, как следствие, к ухудшению тактико-технических характеристик самих космических систем, например, радиотехнических характеристик космических антенн [4-7]. При этом помехи от колебаний упругой конструкции космического аппарата (КА) возникают как в процессе приема антенной полезного сигнала, так и на линии связи между КА и наземной приемо-регистрирующей системой в процессе передачи информации на Землю и приема команд с Земли.
Другая проблема – это обеспечение сверхвысокоточного наведения телескопа на исследуемые объекты (не хуже ![]() , его стабилизации (не хуже
, его стабилизации (не хуже ![]() ) и периодического контроля геометрии главного зеркала.
) и периодического контроля геометрии главного зеркала.
Основным направлением решения первой проблемы в настоящее время является поиск путей снижения микродинамических воздействий от КА на прецизионную полезную нагрузку. Это может быть достигнуто за счет снижения уровня собственных возмущений работающих систем КА или за счет развязки КА с полезной нагрузкой путем применения мягкой связи в виде гибкого интерфейса или карданового подвеса. С этой же целью могут быть использованы также интеллектуальные системы активной пространственной виброзащиты в виде механизмов параллельной структуры, устанавливаемые между КА и полезной нагрузкой. Следует отметить, что, несмотря на эффективность, организация развязки КА с крупногабаритной полезной нагрузкой массой в несколько тонн является в настоящее время и в ближайшей перспективе сложнореализуемой задачей.
Имеется пример успешного применения карданового подвеса в качестве развязки между главным зеркалом двухзеркальной офсетной антенны японского космического радиотелескопа и КА управляемого (рисунок 4.2). Однако здесь зеркало антенны имеет малую массу (200 кг) при диаметре 9,26 м.

Рисунок 4.2 ‑ Общий вид японского космического радиотелескопа международного проекта “ASTRO-G” (VISOP) с большим развертываемым рефлектором (год запуска - 2013)
Что касается решения второй проблемы, то в настоящее время наблюдается тенденция к применению для этих целей механизмов параллельной структуры, выполненных в виде гексаподов, имеющих как моно‑, так и многомодульное исполнение. Например, для наведения и стабилизации главного зеркала космического телескопа «Кеплер» применен прецизионный пространственный механизм в виде гексапода (рисунок 4.3). Благодаря тому, что это зеркало имеет очень высокую жесткость и малый диаметр (1,4 м), в данном случае не требуется применение системы его виброзащиты (в отличие от крупногабаритных низкочастотных прецизионных антенных зеркал диаметром 10 м и более).
Анализ отечественного и зарубежного опыта по созданию систем, обеспечивающих виброзащиту и высокоточное наведение прецизионной полезной нагрузки КА, показал, что практически все они подчинены общей концепции, включающей установку прецизионной полезной нагрузки на КА через последовательно соединенные переходную ферму (первый уровень), систему виброзащиты (второй уровень) и платформу высокоточного наведения (третий уровень). Однако, такой подход неизбежно приводит к увеличению габаритно-массовых характеристик системы и в ряде случаев неприемлем из-за дефицита полезного объема под обтекателем ракеты-носителя. При этом в системе виброзащиты (второй уровень) в области высоких, низких и инфранизких частот предпочтительнее применение активных средств, которые по сравнению с пассивными отличаются более низкими значениями габаритно-массовых характеристик [6-9].
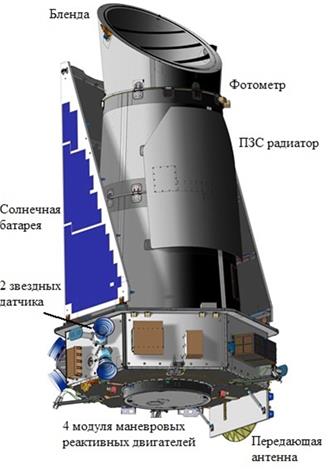

а) б)
Рисунок 4.3 – Космический телескоп «Кеплер»: а) общий вид; б) вид в разрезе
4.2. Интеллектуальная система активной виброзащиты и высокоточного наведения
Предлагается новая концепция построения одноуровневой интеллектуальной системы активной виброзащиты и высокоточного наведения (ИСАВВН) космического телескопа «Миллиметрон», направленная на решение указанных проблем.
В одноуровневой ИСАВВН, отличающейся мировым уровнем новизны [7, 10-12], удается существенно повысить эффективность виброзащиты и высокоточного наведения за счет расширения функциональных возможностей элементов конструкции КА. Например, выполнение переходной фермы КА активной в виде гексапода на основе платформы Стюарта (Stewart) [13] (исполнительный орган ИСАВВН) в одномодульном исполнении или в комбинации с додекаподом [12] в двух и более модульном исполнении, позволяет синтезировать одноуровневую ИСАВВН. Тем самым при тех же габаритно-массовых характеристиках и минимальном энергопотреблении удается получить новое качество КА.
Предлагаемая концепция ИСАВВН применительно к космическому телескопу «Миллиметрон» способна обеспечить:
1) виброзащиту крупногабаритных элементов КА (радиатор и, особенно, панели солнечных батарей) от низкочастотных упругих колебаний, вызванных раскрытием главного зеркала телескопа и теплозащитных экранов;
2) виброзащиту крупногабаритных элементов телескопа от низкочастотных микродинамических воздействий, вызванных работой систем КА;
3) подавление низко- и высокочастотных колебаний упругой конструкции космического телескопа, вызванных внешними и внутренними возмущающими факторами;
4) высокоточное угловое наведение оптической оси космического телескопа;
5) генерирование, при необходимости, вибрационных воздействий на конструкцию космического телескопа и КА, включая проведение вибродиагностики элементов конструкции телескопа и КА;
6) выдвижение сложенной конструкции космического телескопа на исходную позицию относительно КА для последующего раскрытия главного зеркала и теплозащитных экранов.
ИСАВВН космического телескопа, относится к классу наиболее перспективных в настоящее время активных пространственных виброзащитных систем «кинематического типа» [9].
Рассмотрим основные принципы, заложенные в активную виброзащиту «кинематического типа», с позиций механики.
Полагаем, что активный исполнительный элемент, оставаясь абсолютно жестким (в пределах наших допущений), направленно меняет свою длину и рассматривается как генератор относительного перемещения (скорости, ускорения). Такое действие может быть реализовано устройствами различной физической природы. Кинематическое изменение исполнительного элемента происходит под воздействием сигналов от информационно-измерительных преобразователей (датчиков) механических величин (ускорений, сил, перемещений, скоростей и других параметров).
Покажем возможность обеспечения защиты космического телескопа от вибраций со стороны КА и, наоборот, КА со стороны телескопа с помощью одноуровневой пространственной ИСАВВН, построенной в виде гексапода на основе платформы Стюарта.
На рисуноке 4.4 изображена шестистепенная схема системы активной виброзащиты «кинематического типа», на которой твердое тело 1 шарнирно прикреплено к основанию 2 активными элементами-стержнями ![]() , i=1÷6.
, i=1÷6.
Рассмотрим вариант действия вибраций со стороны основания 2. По направлениям осей стержней ![]() действуют со стороны основания 2 ускорения
действуют со стороны основания 2 ускорения ![]() , i=1÷6, измеряемые акселерометрами.
, i=1÷6, измеряемые акселерометрами.
Пусть i-ый стержень изменяет свою длину по закону
![]() . (4.1)
. (4.1)
Здесь и далее s– оператор дифференцирования. Путем согласованного изменения длин активных элементов-стержней ![]() достигается (с учетом значительных базовых расстояний между шарнирными соединениями) прецизионное пространственное позиционирование твердого тела 1 относительно основания 2, что позволяет обеспечить высокоточное наведение антенны телескопа на исследуемый объект.
достигается (с учетом значительных базовых расстояний между шарнирными соединениями) прецизионное пространственное позиционирование твердого тела 1 относительно основания 2, что позволяет обеспечить высокоточное наведение антенны телескопа на исследуемый объект.

Рисунок 4.4 ‑ Схема шестистепенной системы активной виброзащиты «кинематического типа», построенной с помощью платформы Стюарта
Положим, что к твердому телу 1 приложен вектор вибрационных сил и моментов
![]() . (4.2)
. (4.2)
Силы и моменты передаются через активные элементы-стержни ![]() , i=1÷6 и приложены относительно декартовой системы координат
, i=1÷6 и приложены относительно декартовой системы координат ![]() , начало которой находится на твердом теле 1.
, начало которой находится на твердом теле 1.
Ускорения ![]() , i=1÷6 вдоль осей активных элементов-стержней
, i=1÷6 вдоль осей активных элементов-стержней ![]() измеряются в точках крепления к твердому телу акселерометрами и образуют вектор
измеряются в точках крепления к твердому телу акселерометрами и образуют вектор
![]() . (4.3)
. (4.3)
Соответствующие векторы скоростей и перемещений этих точек обозначаем ![]() .
.
Последовательно с активными элементами-стержнями ![]() , i=1÷6 установлены динамометры, которые измеряют вектор сил
, i=1÷6 установлены динамометры, которые измеряют вектор сил
![]() . (4.4)
. (4.4)
Примем еще следующие допущения: твердое тело 1 является абсолютно жестким; основание 2 – абсолютно жесткое и неподвижное; перемещения твердого тела – малые, т.е. геометрически задача может рассматриваться в линейной постановке. Задача состоит в защите от передачи вибрационных сил F на основание 2.
Большое значение в задаче имеют линейные связи между векторами ![]() , векторами
, векторами ![]() , а также между векторами
, а также между векторами ![]() , осуществляемые через матрицу плюккеровых координат A:
, осуществляемые через матрицу плюккеровых координат A:
![]() ;
; ![]() ;
; ![]() ; (4.5)
; (4.5)
![]() . (4.6)
. (4.6)
Здесь ![]() – вектор сил, приложенных к твердому телу со стороны активных элементов-стержней
– вектор сил, приложенных к твердому телу со стороны активных элементов-стержней ![]() , i=1÷6.
, i=1÷6.
Во введенных обозначениях уравнение движения тела имеет вид
![]() , (4.7)
, (4.7)
где M– матрица инерции твердого тела относительно системы координат ![]() .
.
Из выражений (4.5), (4.7) следует, что вектор сил Fможет быть записан в виде
![]() . (4.8)
. (4.8)
Таким образом, вектор кинематических ускорений для управления активными элементами-стержнями ![]() , i=1÷6 определяет выражение
, i=1÷6 определяет выражение
![]() . (4.9)
. (4.9)
Задавая закон движения (4.9), обеспечим условие ![]() , т.е. изоляцию основания 2 от вибрационных сил. В работе [10] такой принцип виброизоляции определен как создание «управляемой податливости».
, т.е. изоляцию основания 2 от вибрационных сил. В работе [10] такой принцип виброизоляции определен как создание «управляемой податливости».
Формулы (4.1) ‑ (4.9) показывают принципиальную возможность обеспечения защиты объекта от вибраций основания и основания от вибраций объекта путем компенсации сил и кинематических воздействий с помощью активных устройств «кинематического типа». На последующих этапах создания таких активных систем разработчиками производится оценка их реализации с учетом конкретных свойств приводов и управляющих систем. При этом большое значение имеет оценка устойчивости алгоритмов компенсации в диапазоне низких частот и возможностей работы приводов в высокочастотном диапазоне. В вопросах устойчивости проблема решается в рамках современной теории управления [13] или с использованием фильтров верхних частот, а также созданием каналов управления по интегралам перемещений. Учитывается также специфика дискретности управления от бортовой информационно-измерительной управляющей системы. Управление ИСАВВН в режиме реального времени может быть обеспечено применением высокопроизводительной вычислительной техники, реализующей методы нейросетевого управления [10].
4.3. Бортовая высокопроизводительная информационно-измерительная управляющая система
Ниже представлена концепция интеллектуальной системы активной виброзащиты и высокоточного наведения раскрываемого на орбите космического телескопа «Миллиметрон», способная обеспечивать в режиме реального времени виброзащиту космического телескопа с одновременным его наведением на исследуемые объекты. Устройство входит в состав трансформируемой конструкции антенны, установленной на космическом аппарате (рисунок 4.6).

Рисунок 4.5 ‑ Структурная схема ИСАВВН космического телескопа
Трансформируемая конструкция антенны выполнена в виде складного зеркала 1 лепесткового типа (возможно использование зеркала антенны любого типа) и опорной системы 3, поддерживающей фокальный блок 4 и звездные датчики 5. Трансформируемая конструкция антенны установлена на несущей конструкции 6 космического аппарата, содержащего панели солнечных батарей 7 и телеметрическую антенну 8, через переходную ферму 9. Платформа 10 и основание 11 переходной фермы 9 жестко прикреплены к узлам стыковки трансформируемой конструкции антенны и несущей конструкции 6 соответственно. Платформа 10 шарнирно связана с основанием 11 посредством подвески с шестью степенями свободы, выполненной в виде манипулятора, включающего не менее шести единичных модулей активной виброизоляции 12 одинакового конструктивного исполнения. Манипулятор построен на основе параллельно соединенных приводных кинематических цепей с возможностью образования пространственной фермы (переходной фермы 9) при отключенных исполнительных органах единичных модулей активной виброизоляции 12, являющихся стержнями фермы 9. Каждый из стрежней снабжен приводом линейного перемещения, позволяющим обеспечить ферме шестистепенную подвижность в работающем состоянии и геометрическую неизменяемость в выключенном состоянии. В местах шарнирного закрепления каждого из единичных модулей активной виброизоляции 12 к платформе 10 и основанию 11 установлены совмещенные датчики пространственного положения и ускорений 13 и 14, выполненные в виде миниатюрных трехосных блоков гироскопов-акселерометров, позволяющих определять относительные перемещения единичных модулей активной виброизоляции 12 и измерять составляющие ускорения, действующие на их продольные оси. В контрольных точках формообразующих элементов конструкции антенны (складное зеркало 1 и опорная система 3) и панелей солнечных батарей 7 установлены совмещенные датчики пространственного положения и ускорений 15-17.
Бортовая высокопроизводительная информационно-измерительная управляющая система (БВИИУС) 18 включает нейрокомпьютер 19, программно-алгоритмическое обеспечение 20 и цифро-аналоговые преобразователи 21. Входы БВИИУС 18 через входные шины аналого-цифровых преобразователей (АЦП) подключены соответственно к выходам АЦП 22 совмещенных датчиков пространственного положения и ускорений 13-17, АЦП 23 ‑ оптических звездных датчиков 5, АЦП 24 ‑ датчиков относительной скорости 25. Выходы БВИИУС 18 через выходные шины подключены к соответствующим входам последовательно соединенных цифро-аналоговых преобразователей (ЦАП) 21, усилителей мощности 26 и исполнительных органов (единичных модулей активной виброизоляции 12 и приводов поворота 27 панелей солнечных батарей 7), а также ко входу соединенных последовательно бортовой радиотелеметрической системы (БРТС) 28, радиолинии 29 и наземной приемно-регистрирующей системы 30.
Функционирование ИСАВВН в процессе эксплуатации космического телескопа реализовано следующим образом.
В контрольных точках, которые выполняют для всех формообразующих элементов трансформируемой конструкции антенны и протяженных элементов космического аппарата, включая места шарнирного закрепления каждого из единичных модулей активной виброизоляции 12 к платформе 10 и основанию 11 переходной фермы 9, устанавливают совмещенные датчики пространственного положения и ускорений. Так, например, в контрольных точках единичных модулей активной виброизоляции 12, складного зеркала 1, опорной системы 3 и панелей солнечных батарей 7 устанавливают соответствующие совмещенные датчики пространственного положения и ускорений 13-17. При этом каждая из контрольных точек используется как для контроля ее ускорений, так и для контроля отклонений от теоретического положения в пространстве. Совмещенные датчики пространственного положения и ускорений 13-17 устанавливают непосредственно в контрольных точках таким образом, чтобы исключить их влияние на нарушение радиотехнических характеристик трансформируемой конструкции антенны (затенение рабочей поверхности складного зеркала 1, переотражение и рассеивание передаваемых и принимаемых радиоволн и др.), а также чтобы исключить затенение рабочей поверхности панелей солнечных батарей 7. Кроме того, должна быть обеспечена стабильность геометрических связей контрольных точек с контролируемыми участками элементов конструкций трансформируемой антенны и космического аппарата.
Взаимную настройку совмещенных датчиков пространственного положения и ускорений 13-17 осуществляют относительно базовой системы координат после окончательной юстировки конструкции трансформируемой антенны, панелей солнечных батарей 7 и других протяженных элементов космического аппарата. Настройку производят в наземных условиях с помощью независимой системы контроля геометрии с одновременным контролем геометрии конструкции антенны, панелей солнечных батарей и других протяженных элементов космического аппарата в их обезвешенном состоянии. При настройке учитывают результаты физического моделирования внешних и внутренних факторов, воздействующих на трансформируемую конструкцию антенны и космический аппарат в процессе их эксплуатации.
После выведения на орбиту космического аппарата и раскрытия складного зеркала 1 трансформируемой антенны, панелей солнечных батарей 7, телеметрической антенны 8 и других протяженных элементов, а также включения единичных моделей активной виброизоляции 12 в активный режим, показания совмещенных датчиков пространственного положения и ускорений сравнивают со значениями, полученными при их наземной настройке. По результатам сравнения судят о деформациях и упругих колебаниях элементов конструкции трансформируемой антенны (складной зеркало 1, опорная система 3), панелей солнечных батарей 7 и других протяженных элементов), а также о взаимном расположении платформы 10 и основания 11 в процессе эксплуатации. При отклонениях превышающих, допустимые значения, осуществляют выбор одного из следующих режимов (или их комбинаций) управления динамикой трансформируемой конструкции антенны и космического аппарата в масштабе реального времени:
‑ первый режим – виброизоляция космического аппарата и его протяженных элементов (панели солнечных батарей 7, телеметрическая антенна 8 и др.) при раскрытии трансформируемой конструкции антенны;
‑ второй режим – виброизоляция конструкции трансформируемой антенны от микродинамических воздействий, вызванных работой систем космического аппарата в процессе эксплуатации;
‑ третий режим - подавление колебаний конструкции трансформируемой антенны, вызванных ее раскрытием и внешними воздействующими факторами;
‑ четвертый режим – подавление колебаний протяженных элементов конструкции космического аппарата, например, панелей солнечных батарей, вызванных работой систем космического аппарата в процессе эксплуатации (система терморегулирования приборного контейнера несущей конструкции 6 космического аппарата, приводы поворота панелей солнечных батарей 7 и телеметрической антенны 8, силовые гиродины системы ориентации космического аппарата и др.);
‑ пятый режим - определение отклонений пространственных положений оптической оси трансформируемой антенны и панелей солнечных батарей 7 от теоретических, вызванных деформацией их формообразующих элементов от внешних или внутренних воздействующих факторов (микродинамические воздействия, термодеформации и др.), и, в случае превышения допустимых значений, проведение их юстировки.
При этом ведут непрерывную обработку векторной информации от звездных датчиков 5, совмещенных датчиков пространственного положения и ускорений 13-17, а также датчиков относительной скорости 25. На анализа этой информации в БВИИУС 18 формируют в масштабе реального времени управляющие команды и подают на исполнительные органы (единичные модули активной виброизоляции 12 и приводы поворота 27 панелей солнечных батарей 7. Обработанную информацию от датчиков и научной аппаратуры фокального блока 4 преобразуют в радиосигналы и через БРТС 28 по радиолинии 29 передают в наземную приемно-регистрирующую систему 30 для дальнейшей обработки, анализа и формирования при необходимости управляющих команд, а также для передачи их на космический аппарат для проведения корректировки программ наблюдений.
Применение в БВИИУС 18 нейрокомпьютера 19 с соответствующим программно-алгоритмическим обеспечением 20 позволяет организовать работу по управлению динамикой трансформируемой антенны и космического аппарата в масштабе реального времени.
По аналогии совмещенные датчики пространственного положения и ускорений могут устанавливаться и на другие крупногабаритные низкочастотные элементы космического телескопа и КА, например теплозащитные экраны и радиатор.
Реализация ИСАВВН космического телескопа возможна на базе имеющихся, на сегодняшний день, разработок и функционирующих устройств [6-12].
Список литературы
1. Артеменко Ю.Н. Синтез механизмов ориентации космического телескопа «Миллиметрон». 1. Возможности механизмов параллельной структуры для ориентации космического телескопа «Миллиметрон». Возможности механизмов параллельной структуры для ориентации космического телескопа «Миллиметрон» // Наука и образование: электронное научно-техническое издание. 2013. № 1. DOI: 10.7463/0113.0534292
2. Артеменко Ю.Н., Карпенко А.П., Пащенко В.Н., Мартынюк В.А., Волкоморов С.В., Темерев К.А., Шарыгин А.В.. Синтез механизмов ориентации космического телескопа «Миллиметрон». 2. Синтез и оптимизация многосекционного манипулятора параллельной структуры для управления ориентацией космического телескопа «Миллиметрон» // Наука и образование: электронное научно-техническое издание. 2013. № 3. DOI: 10.7463/0413.0554360
3. Артеменко Ю.Н., Глазунов В.А., Сильвестров Э.Е., Кореновский В.В., Демидов С.М. Синтез механизмов ориентации космического телескопа «Миллиметрон». 3. Синтез механизмов параллельной структуры для ориентации антенны космического телескопа // Наука и образование: электронное научно-техническое издание. 2013. № 5. DOI: 10.7463/0513.0571127
4. Лебедев А.П., Полежаев В.И. Механика невесомости: микроускорения и гравитационная чувствительность процессов массообмена при получении материалов в космосе // Успехи механики. 1990. Т. 13, вып. 1. С. 3-51.
5. Титов Б.А., Вьюжанин В.А., Дмитриев В.В. Формирование динамических свойств упругих космических аппаратов. М.: Машиностроение, 1995. 304 с.
6. Саяпин С.Н., Синев А.В., Трубников А.Г. Проблема гравитационной чувствительности высокоточных трансформируемых антенн космических радиотелескопов // VII Российский симпозиум «Механика невесомости. Итоги и перспективы фундаментальных исследований гравитационно-чувствительных систем» (Москва, 11-14 апреля 2000 г.) : сб. трудов. М.: ИПМ РАН, 2001. С. 463-474.
7. Саяпин С.Н., Синев А.В., Трубников А.Г. Способ подавления помех от колебаний упругой конструкции космической трансформируемой антенны в процессе эксплуатации и устройство для его осуществления : пат. 2161109 РФ. 2000. Бюл. 36.
8. Саяпин С.Н. Перспективы и возможное применение пространственных механизмов параллельной структуры в космической технике // Проблемы машиностроения и надежности машин. 2001. № 1. С. 17-26.
9. Саяпин С.Н. Анализ и синтез раскрываемых на орбите прецизионных крупногабаритных механизмов и конструкций космических радиотелескопов лепесткового типа: дис. … д-ра тех. наук. М., ИМАШ РАН, 2003. 446 с.
10. Саяпин С.Н., Кокушкин В.В. Способ подавления помех от колебаний упругой конструкции космической трансформируемой антенны в процессе эксплуатации и устройство для его осуществления : пат. 2323136 РФ. 2008. Бюл. № 12.
11. Саяпин С.Н., Синев А.В. Линейный привод : пат. 2373611 РФ. 2009. Бюл. № 32.
12. Саяпин С.Н., Синев А.В. Адаптивный мобильный пространственный робот-манипулятор и способ организации движений и контроля физико-механических свойств и геометрической формы контактируемой поверхности и траектории перемещения с его помощью: пат. 2424893 РФ. 2011. Бюл. № 21.
13. Квакернаак Х., Сиван Р. Линейные оптимальные системы управления : пер. с англ. М.: Мир, 1977. 650 с.
14. Омату С., Халид М., Юсов Р. Нейроуправление и его приложения. Кн. 2 / пер. с англ. Н.В. Батина; ред. А.И. Галушкин, В.А. Птичкин. М.: ИПРЖР, 2000. 272 с. (Сер. Нейрокомпьютеры и их применение). [Omatu S., Marzuki B. Khalid, Yusof R. Neuro-Control and its Applications. New York, Springer Verlag, 1996. 255 p. (Ser. Advances in Industrial Control). DOI: 10.1007/978-1-4471-3058-1 ].
Публикации с ключевыми словами: радиотелескоп, космический телескоп «Миллиметрон», механизм параллельной структуры, многосекционный манипулятор, активная виброзащита
Публикации со словами: радиотелескоп, космический телескоп «Миллиметрон», механизм параллельной структуры, многосекционный манипулятор, активная виброзащита
Смотри также:
- Синтез механизмов ориентации космического телескопа «Миллиметрон». 2. Синтез и оптимизация многосекционного манипулятора параллельной структуры для управления ориентацией космического телескопа «Миллиметрон»
- Синтез механизмов ориентации космического телескопа «Миллиметрон». 3. Синтез механизмов параллельной структуры для ориентации антенны космического телескопа
- Синтез механизмов ориентации космического телескопа «Миллиметрон». 1. Возможности механизмов параллельной структуры для ориентации космического телескопа «Миллиметрон»
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||