научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 08, август 2013
DOI: 10.7463/0813.0567732
УДК 62-522.2
Россия, МГТУ им. Н.Э. Баумана
ОАО «КАМАЗ»
Введение
Требуемый уровень демпфирования многоопорной колебательной системы, как известно, зависит от характера внешнего воздействия [1]. В связи с этим регулирование характеристики демпфирования в зависимости от режимов работы систем амортизации является одним из основных направлений дальнейшего их совершенствования. Весьма перспективно это направление для повышения качества систем первичного подрессоривания многоосных колесных машин (МКМ) с количеством осей более трех [2].
Проведенные исследования показывают, что, применяя в качестве исполнительных устройств регулируемые напорные клапаны в гидравлических амортизаторах или пневмогидравлических рессорах, по способу, предложенному в работе [2], можно получать в подвеске любую требуемую для управления силу. При этом без потери эффективности можно значительно упростить систему управления, используя вместо регулируемых напорных клапанов более простые исполнительные устройства, вплоть до перехода к управлению трехуровневым демпфированием по релейному принципу.
Полученные в работе [2] обобщенные выражения для релейного управления могут быть приведены (в качестве частного случая управления) к известному алгоритму профессора А.А. Дмитриева противодействия продольно-угловым колебаниям корпуса. Рассмотрим этот частный случай для разработки адаптивного закона управления.
Выбор уровней демпфирования подвески
В работе [3] показано, что для многоосных автомобилей, в силу узкополосного низкочастотного спектра колебаний подрессоренной массы желательной является характеристика демпфирования, обеспечивающая автоматическое получение в зоне резонанса значения коэффициента затухания около ψ=0,4…0,6 по продольно-угловым и вертикальным колебаниям, независимо от массы объекта и изменения восстанавливающей силы. В то же время в зарезонансной зоне уровень демпфирования надо снижать [4], что приводит к существенному снижению вибронагруженности МКМ. Это приводит к необходимости создания подвески переменной структуры, в которой происходит автоматическое изменение уровня демпфирования в зависимости от вида воздействия на МКМ со стороны дорожных неровностей. Причем достаточно трех уровней: высокого, обеспечивающего ψ=0,4…0,6, низкого (ψ=0,1…0,2), и среднего (ψ=0,25…0,3). При этом средний уровень является основным, а высокий и низкий устанавливаются в зависимости от режима движения.
На основании этих соображений в работе [5] были получены упругая (рис. 1) и трехуровневая демпфирующая (рис. 2) характеристики подвески многоосной колесной машины, технические характеристики которой приведены в работе [2].

Рис. 1. Зависимость упругой силы подвески от прогиба

Рис. 2. Зависимость демпфирующей силы подвески от скорости прогиба
Разработка адаптивного релейного закона противодействия продольно-угловым колебаниям корпуса МКМ
Принцип работы алгоритма противодействия продольно-угловым колебаниям профессора А.А. Дмитриева подробно рассмотрен в [6], где было показано, что данный закон управления обладает следующим существенным недостатком: склонность к возникновению автоколебаний, из-за чего приходится вводить зону нечувствительности, конкретные параметры которой – одна из форм неопределенности при проектировании регулятора. Чтобы избежать указанных трудностей, воспользуемся методами нечеткой логики.
Известно, что нечеткое управление основано на использовании не столько аналитических или теоретических моделей, сколько на практическом применении знаний квалифицированных специалистов, представленных в форме лингвистических баз правил. Нечеткое управление эффективно в случаях недетерминированности параметров объектов, когда существует определенный опыт экспертов по управлению и настройке автоматизированной системы регулирования. Теория нечеткой логики позволяет использовать знания специалистов — экспертов с целью улучшения процессов управления и оказания помощи по настройке типовых регуляторов. Исходя из вышесказанного, задача создания метода адаптации регулятора, реализующего опыт экспертов, становится актуальной.
В процессе настройки регулятора используется несколько шагов [7]. Необходимо выбрать диапазоны входных и выходных сигналов, форму функций принадлежности искомых параметров, правила нечёткого вывода, механизм логического вывода, метод дефаззификации и диапазоны масштабных множителей, необходимых для пересчёта чётких переменных в нечёткие.
Процедура фаззификации
Начнем процедуру фаззификации. Для этого введем одну входную лингвистическую переменную Х1 «Продольно-угловая скорость корпуса», которая характеризуется термами «низкий уровень», «средний уровень», «высокий уровень», и одну выходную лингвистическую переменную b «Уровень демпфирования». Функции принадлежности для входной переменной показаны на рис. 3. Для выходной переменной примем те же термы «низкий уровень», «средний уровень», «высокий уровень», соответствующие демпфирующей характеристике, изображенной на рис. 2.

Рис. 3. Функции принадлежности входной переменной «Продольно-угловая скорость корпуса»
Правила и механизм нечёткого логического вывода
Следующий этап – разработка нечетких правил. Большинство нечетких систем используют продукционные правила, связывающие лингвистические переменные [8]. Совокупность таких правил описывает стратегию принятия решения, применяемую в данной задаче.
Процесс вычисления нечеткого правила называется нечетким логическим выводом и подразделяется на два этапа: обобщение и заключение. Будем использовать алгоритм нечеткого логического вывода Мамдани [9]. Пример нечеткого правила выглядит следующим образом:
ЕСЛИ Х1 «Продольно-угловая скорость корпуса» = «средний уровень», ТО b «уровень демпфирования» = «средний уровень». Полный набор нечетких правил выглядит следующим образом:

Процедура дефаззификации
На последнем этапе необходимо осуществить переход от нечетких значений выходной величины Y к четкому числовому значению. Эта операция называется дефаззификацией (устранением нечеткости). Так как результатом нечеткого логического вывода может быть несколько термов выходной переменной, то правило дефаззификации должно определить, какой из термов выбрать.
Для релейного управления нужно принять решение, какой уровень демпфирования из трех возможных должен быть установлен. Для этого наилучшим образом подходит метод наибольшего значения [8]. При использовании этого метода правило дефаззификации выбирает максимальное из полученных значений выходной переменной.
Анализ эффективности разработанного адаптивного релейного закона управления системой подрессоривания
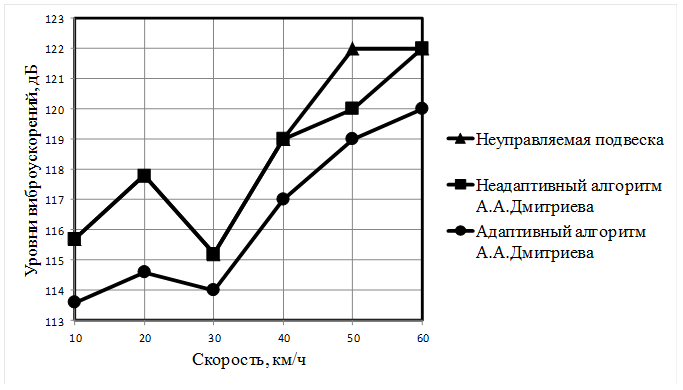
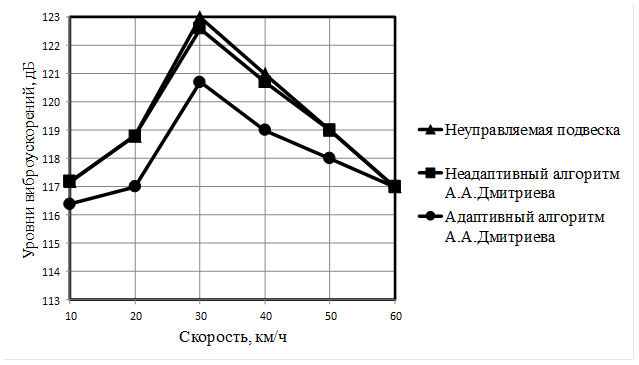
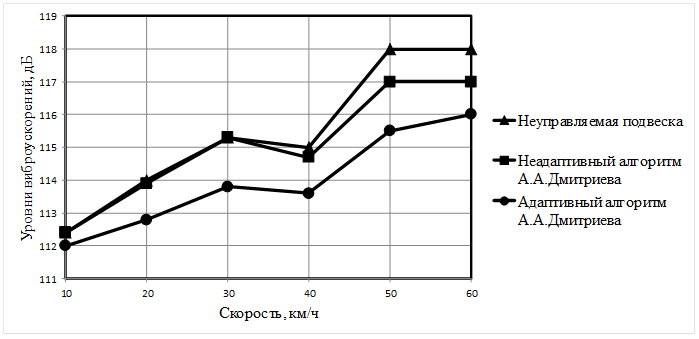
Для оценки эффективности разработанных адаптивных релейных законов управления подвеской на различных скоростях движения по грунтовой дороге 2-й категории [10] моделировалось движение МКМ в диапазоне скоростей 10…60 км/ч. Математическая модель движения МКМ представлена в работе [5], технические характеристики машины – в работе [10]. На рис. 4 (а – д) представлены уровни вертикальных виброускорений на месте водителя для I – V октавных полос частот.

а)

б)
в)
г)
д)
Рис. 4. Уровни вертикальных виброускорений в октавных полосах частот: а) – I октава; б) – II октава; в) – III октава; г) – IV октава; д) – V октава.
Для проведения анализа эффективности разработанного адаптивного закона противодействия продольно-угловым колебаниям корпуса МКМ используем критерий Ki (для i-ой скорости движения на всей совокупности грунтовых дорог), характеризующий работу данной системы по сравнению с неуправляемой подвеской [10]:
 (1)
(1)
Здесь ![]() - дисперсия вертикальных ускорений на месте водителя для случая управляемой подвески при движении с i-ой скоростью; j – номер категории грунтовой дороги.
- дисперсия вертикальных ускорений на месте водителя для случая управляемой подвески при движении с i-ой скоростью; j – номер категории грунтовой дороги.
Критерий (1) характеризует степень снижения дисперсии вертикальных ускорений на месте водителя для случая управляемой подвески по сравнению с неуправляемой системой подрессоривания. На рис. 5 показана зависимость показателя эффективности Ki для различных адаптивных законов управления от скорости движения для всей совокупности грунтовых дорог.

Рис. 5. Зависимость критерия эффективности Kiдля различных адаптивных законов управления подвеской для различных скоростей движения по грунтовым дорогам
Выводы
Анализ представленных результатов позволяет сделать вывод о том, что эффективность (снижение уровня дисперсии вертикальных ускорений на месте водителя по сравнению с неуправляемой подвеской) адаптивного закона противодействия продольно-угловым колебаниям составляет 7…22%. Введение адаптивной составляющей для закона противодействия продольно-угловым колебаниям повышает эффективность данного алгоритма на 5…10% по сравнению с неадаптивным законом.
Работа выполнена при финансовой поддержке Министерства образования и науки Российской Федерации в рамках договора №9905/17/07-к-12 между ОАО «КАМАЗ» и «Московским государственным техническим университетом имени Н.Э. Баумана».
Список литературы
1. Фурунжиев P.И., Останин А. Н. Управление колебаниями многоопорных машин. М.: Машиностроение, 1984. 206 с.
2. Жилейкин М.М. Разработка адаптивного алгоритма релейного управления двухуровневым демпфированием подвески многоосных колесных машин // Наука и образование. МГТУ им. Н.Э. Баумана. Электрон. журн. 2011. № 12. Режим доступа: http://technomag.edu.ru/doc/347444.html (дата обращения 26.05.2013).
3. Дербаремдикер А.Д. Амортизаторы транспортных машин. М.: Машиностроение, 1985. 200 с.
4. Самонастраивающийся амортизатор с программированной демпфирующей характеристикой / А.Д. Дербаремдикер, Р.А. Мусарский, И.О. Степанов, М.А. Юдкевич // Автомобильная промышленность. 1985. № 1. С. 13-15.
5. Проектирование полноприводных колесных машин: учебник для вузов: В 3 т. Т. 3 / Б.А. Афанасьев, Б.Н. Белоусов, Л.Ф. Жеглов и др.; Под ред. А.А. Полунгяна. М.: Изд-во МГТУ им. Н.Э. Баумана, 2008. 432 с.
6. Сухоруков А.В. Управление демпфирующими элементами в системе подрессоривания быстроходной гусеничной машины: дисс. ... канд. техн. наук. М., 2003. 204 с.
7. Feng H.M. A selftuning fuzzy control system design // IFSA World-Congress and 20th NAFIPS International Conference (Vancouver, British Columbia, Canada, 25-28 July 2001). 2001. Vol. 1. P. 209-214.
8. Гриняев С.В. Нечеткая логика в системах управления // Компьютерра Online: электронный ресурс. Режим доступа: http://www.computerra.ru/offline/2001/415/13052/ (дата обращения 26.05.2013).
9. Штовба С.Д. Проектирование нечетких систем средствами MATLAB. М.: Горячая линия-Телеком, 2007. 288 с.
10. Жилейкин М.М. Сравнительный анализ эффективности работы непрерывной и релейной систем управления подвеской многоосных колесных машин // Наука и образование. МГТУ им. Н.Э. Баумана. Электрон. журн. 2012. № 3. Режим доступа: http://technomag.edu.ru/doc/347783.html (дата обращения 26.05.2013).
Публикации с ключевыми словами: нечеткая логика, упругая характеристика подвески, демпфирующая характеристика подвески, трехуровневое демпфирование, адаптивное релейное управление
Публикации со словами: нечеткая логика, упругая характеристика подвески, демпфирующая характеристика подвески, трехуровневое демпфирование, адаптивное релейное управление
Смотри также:
- Разработка адаптивного закона релейного управления трехуровневым демпфированием упруго-демпфирующих элементов подвески многоосных колесных машин
- 77-30569/346642 Экспериментальное исследование нагрузочных характеристик двухкамерной пневмогидравлической рессоры подвески автомобильных платформ нового поколения средней и большой грузоподъёмности
- 77-30569/346660 Методика расчета характеристик пневмогидравлической управляемой подвески с двухуровневым демпфированием многоосных колесных машин
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||