научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 05, май 2013
DOI: 10.7463/0513.0566233
УДК 621.865.8:621.11.012.8 (075.8)
Россия, МГТУ им. Н.Э. Баумана
С ростом количества происшествий, связанных с применением террористами взрывоопасных предметов (ВОП), а также операций по их обезвреживанию, усиливается роль безлюдных технологий. Чаще всего в операциях по нейтрализации (ликвидации) ВОП используются мобильные роботы (МР) [1].
Большинство современных роботов легкого (массой от 30 до 100 кг) и среднего (массой свыше 100 до 500 кг) классов, участвующих в ликвидации последствий террористических проявлений, используют в качестве источника энергии, необходимой для движения и привода навесного или дополнительного оборудования, электрохимические аккумуляторные батареи, устанавливаемые на борту МР.
Как правило, в конструкциях существующих роботов применяются аккумуляторы автомобильного типа ёмкостью (6…12) А·ч – для МР легкого класса и (55…85) А·ч – для МР среднего класса. Для роботов среднего класса иногда используют два аккумулятора, что создает определенные удобства при компоновке МР по бортовой схеме, когда каждый аккумулятор обслуживает свой борт (трансмиссию).
По данным зарубежных источников [2] указанных значений ёмкости аккумуляторов хватает на проведение непрерывной работы (при умеренном режиме нагружения) или при движении в городских условиях в среднем от 45 мин до 1,5 часов для легких МР и от 2 до 4 часов для средних МР. В отчетах служб, эксплуатирующих роботы, предназначенные для нейтрализации взрывных устройств, отмечается, что такие показатели не удовлетворяют современным тактико-техническим требованиям, предъявляемым к МР. Технические условия по эксплуатации свинцово-кислотных аккумуляторов МР не допускают производить их глубокую разрядку до величины, превышающей 70% от максимальной (начальной) ёмкости. Оставшаяся часть ёмкости аккумулятора (т.е. 30%) составляет «неприкосновенный запас» МР. Проблема усугубляется тем, что в ответственный момент при выполнении боевой задачи аккумулятор может оказаться разряженным, а МР не готовым к действию. Уменьшение ёмкости (разрядка) бортового аккумулятора до 30% от номинала не позволит не только МР тронуться с места, но и произвести в случае необходимости работы с использованием навесного оборудования или манипулятора.
Такая ситуация характерна как при управлении МР по кабелю так и по радиоканалу.
Возникают также осложнения при необходимости возврата МР своим ходом в исходную точку или при его отводе на безопасное расстояние от места действия без использования вспомогательных средств буксировки. Кроме того, существуют такие условия, когда прямое вмешательство человека–оператора в указанные процессы недопустимо по условиям безопасности, например при необходимости аварийного раскрытия губок манипулятора, удерживающего взрывоопасный предмет.
Зарядка (или подзарядка до определенной величины) штатного аккумулятора от внешнего источника энергоснабжения или от сети при помощи зарядно – выпрямительных устройств требует значительных затрат времени. Так, при зарядном токе (3,0…5,0) А для полной зарядки аккумулятора начальной емкостью 55…85 А·ч затраты времени составят около 8…10 ч.
Даже в случае неполной зарядки батарей до уровня, позволяющего начать движение МР, во – первых, также потребуется затратить значительное время, а, во – вторых, все равно необходимо вмешательство человека, что, как было отмечено выше, может оказаться не допустимым.
Для решения поставленных задач, а также с целью использования рекуперируемой энергии, высвобождаемой при торможении МР или при движении под уклон, предлагается нетрадиционный подход. Для этого необходимо использовать в качестве вспомогательного (дополнительного) источника питания, например, энергию быстровращающегося маховика. Маховичный аккумулятор энергии (МАЭ), позволяет, при необходимости, запасать или высвобождать энергию, используемую для движения МР или для зарядки бортовых аккумуляторов.
На рисунке представлена принципиальная блок – схема гибридного мобильного робота с использованием обратимой электромашины 1, размещенной с маховиком 2 в едином модуле. Получившийся таким образом электромеханический аккумулятор энергии 3 становится дополнительным источником энергии МР. При этом усложнение всей системы управления роботом будет незначительным. Для этого потребуется, чтобы блок 4 управления МАЭ переводил электромашину 1 маховика в соответствующий режим. Блок 5 управления системой связан с блоком 4 управления МАЭ и с обратимой электромашиной 6 трансмиссии, которая может передавать энергию через сцепление (муфту) 7 ведущим колесам 8 машины или, при необходимости, заряжать бортовые электрохимические аккумуляторы 9. Электромагнитная муфта 10 МАЭ предназначена для консервации энергии маховика при длительной стоянке машины.
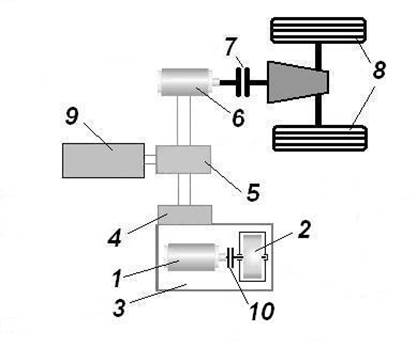
Схема гибридного МР с двумя источниками энергии
1 – обратимая электромашина МАЭ; 2 – маховик; 3 – электромеханический аккумулятор энергии; 4 – блок управления МАЭ; 5 – блок управления системой; 6 – обратимая электромашина трансмиссии; 7 – сцепление (муфта); 8 – ведущие колеса машины; 9 – бортовые электрохимические аккумуляторы; 10 – электромагнитная муфта МАЭ.
Маховик позволит в аварийных режимах (хотя и не только) в течение определенного промежутка времени снабжать энергией навесное оборудование (телекамеры, пульт управления, мониторы и т.п.), а также другие потребители.
При легких условиях движения МР (например, в городе по асфальтовому или бетонному покрытию с малым коэффициентом суммарного сопротивления движению fс машины) полная энергия, которую могут вырабатывать электрохимические аккумуляторы, будет превосходить потребную на движение. Поэтому часть свободной энергии аккумуляторов можно направить на «зарядку» (раскрутку) маховика во время движения или перемещения МР к месту выполнения работ. Доля этой энергии, являющаяся случайной величиной, определяется соотношением (балансом) энергий потребной на движение и развиваемой электрохимическими аккумуляторами.
В тяжелых условиях эксплуатации МР (при движении по песку, снегу или при бортовом повороте) запасенной маховиком энергией можно воспользоваться для преодоления труднопроходимого участка. Совместный отбор энергии от маховика и электрохимических аккумуляторов позволит также улучшить тягово – динамические качества МР.
Рекуперация энергии, высвобождаемой при торможении МР или при движении под уклон, позволит раскрутить маховик при неполной его зарядке или подзарядить бортовые аккумуляторы. При этом также можно осуществить одновременную зарядку обоих источников энергии.
При полностью раскрученном маховике (или при частоте его вращения не ниже 50% от максимальной), если допускают условия эксплуатации МР, можно производить подзарядку штатных аккумуляторных батарей энергией маховика. Такое возобновление работы аккумуляторных батарей в привычном для себя режиме «зарядка – разрядка» позволит повысить их долговечность и увеличит срок службы. Кроме того, применение маховика позволит сгладить пиковые нагрузки по току при пусковых режимах.
При необходимости, в случае сильной разрядки штатных аккумуляторов, можно осуществлять перемещение МР своим ходом на ограниченные расстояния.
Основным параметром (характеристикой) МАЭ также как и для обычных аккумуляторов является его максимальная энергоемкость Eamax, т.е. полное количество запасаемой энергии, измеряемой в джоулях или в ватт часах. Для оценки эффективности часто используют понятие удельной энергоемкости, т.е. количество запасаемой энергии, отнесенное к массе маховика, определяемое соотношением:
еа = Еа max/ma, (1)
где ma– масса маховика энергоаккумулирующего устройства в кг.
Современные электрохимические аккумуляторные батареи по своим удельным показателям практически сравнялись с маховиками, выполненными из высококачественных сталей, но пока проигрывают маховикам, изготовленным из композитных материалов.
Например, удельная энергоёмкость (плотность энергии) современных литий-ионных (Li-ion) аккумуляторов составляет 100 … 180 Вт·ч/кг.
В то же время плотность энергии маховика, например, изготовленного из композитного материала (S-стекла) составляет 530 Вт·ч/кг, а маховика, изготовленного из легированной стали – 130 Вт·ч/кг.
Поскольку масса (габаритные размеры) маховика, а, следовательно, и пропорциональная ей максимальная энергоемкость ограничивается свободным объемом корпуса машины, выбор рациональной формы маховика становится очень важной характеристикой энергоаккумулирующего устройства в целом [3]. Поэтому для транспортного средства (ТС) или МР с целью максимизации энергии, запасенной на килограмм массы, маховик лучше изготавливать не в форме обода, а монолитным.
Оценку перспективности применения МАЭ выполним на примере перспективного МР среднего класса массой 300 кг, развивающего максимальную скорость Vтс max = 5 м/с (18 км/ч).
Из компоновочных соображений, с целью размещения МАЭ в моторно – трансмиссионном отделении (МТО) МР, зададим диаметр маховика dа равным 0,2 м. Масса сплошного (без отверстия) однородного маховика цилиндрической формы, выполненного из стали, шириной bм равной 0,05 м составит 12,3 кг.
Момент инерции цилиндрического диска находится по формуле
Iа = 0,5·ma·R2, (2)
где R – радиус маховика, м.
Для выбранного маховика с учетом (2) получим Iа = 0,0615 кг·м2.
Максимально допустимая угловая скорость ωа maxмаховика при заданных его размерах и форме будет ограничиваться только прочностью материала, из которого он изготовлен. Для ее нахождения воспользуемся известной формулой [4]
еa = К·σвр/ρ, (3)
где К– коэффициент формы маховика;
σвр – предел прочности материала маховика в Па или Н/м2;
ρ– плотность материала в кг/м3.
Коэффициент формы Кзависит только от формы маховика и выбранного критерия предельного состояния. Для цилиндрического сплошного маховика К = 0,606 [4].
Максимальная кинетическая энергия вращающегося маховика находится по формуле:
Еа max = 0,5·Iа·ω²а max. (4)
Подставив выражения (1), (2) и (4) в (3) и разрешив уравнение относительно ωа max, получим
ωа max = (2/R)·(К·σвр/ρ)0,5. (5)
Для легированной стали, предел прочности которой составляет 1000 МПа, определим максимально допустимую угловую скорость вращения. Подставив численные значения параметров в формулу (5), получим ωа maxравную 5564 рад/с. Таким образом, для легированной стали предельно допустимая частота вращения маховика составит около 53000 мин–1. При таком значении частоты вращения для уменьшения аэродинамических потерь маховик необходимо поместить в камеру, из которой откачивается воздух. В случае небольших скоростей вращения маховик можно установить в камере (кожухе) без вакуумирования.
Ограничим с точки зрения повышения безопасности (при возможном аварийном разрушении ротора) и из конструктивных соображений (с целью отсутствия вакуумирования камеры, снижения потерь и нагрузок в подшипниковых узлах, уплотнениях и т.п.) максимальную частоту вращения маховика величиной 12000 мин–1 (ω´а max= 1256,6 рад/с). При этом коэффициент запаса по частоте вращения, а, следовательно, и по прочности, составит:
Кз = ωа max/ω´а max = 4,42.
Чтобы раскрутить маховик до частоты вращения 12000 мин–1 потребуется установить на борту МР дополнительную обратимую электромашину небольшой мощности (150 … 200 Вт). Конструктивно можно выполнить аккумулирующий модуль в едином блоке, например, по технологии фирмы FlybridAutomotiveLimited [5].
Полная энергоемкость маховика Е´а max для ω´а max, определяемая по формуле (4), составит 48,5 кДж или около (13,5 Вт·ч).
Удельная энергоемкость маховика еaсоставит 3,95 кДж/кг (1,1 Вт·ч/кг), что соответствует приблизительно 1,22 % от удельной энергоемкости (90 Вт·ч/кг) Li-ionэлектрохимического аккумулятора массой около 8 кг. Такая малая величина удельной энергоемкости не должна вводить в заблуждение, так как восполнение энергии маховика осуществляется за короткий промежуток времени.
Время tз потребное на полную зарядку маховика определится из формулы
tз = ξр·E´amax/Nэд·(1 – ζa ср), (6)
где ξр – коэффициент, характеризующий глубину разрядки МАЭ;
Nэд– выходная мощность электромашины МАЭ;
ζa ср – средние значения потерь энергии в аккумулирующем модуле маховика. Принято, что ζa ср = 0,05.
Коэффициент разрядки маховика определяется по формуле [6]
ξр = 1 – (ω´а min/ω´а max)2, (7)
где ω´а min– минимально допустимая угловая скорость разрядки маховика.
Если принять, что на движение МР используется 88,9 % максимальной энергии маховика, то ω´а min составит 1/3·ω´а max или ξр = 0,889.
Например, при использовании в приводе МАЭ 150-ваттной обратимой электромашины время полной зарядки маховика до Е´а maxсоставит 0,084 ч или 303 с.
Путь Sо, преодолеваемый ТС при использовании только энергии МАЭ, зависит от условий движения. Составим уравнение энергий и работ сил сопротивления
![]() (8)
(8)
где Σζi ср – средние значения потерь энергии в аккумулирующем модуле маховика, трансмиссии, системе подрессоривания и движителях ТС соответственно;
fс– суммарный коэффициент сопротивления прямолинейному движению ТС;
М тс – масса транспортного средства (или МР).
При расчете приняты следующие осредненные значения потерь: в трансмиссии –
ζтр ср = 0,2, в системе подрессоривания ζп ср = 0,1 и движителях – ζгд ср = 0,15. Аэродинамические потери в камере маховика и сопротивления воздуха при движении ТС не учитывались в силу их малости.
Данные расчета по формуле (8) общего пути Sодля различных условий движения МР приведены в таблице.
Таблица
fс | 0,04 | 0,08 | 0,12 | 0,16 | 0,2 |
Sо, м | 1796,5 | 898 | 599 | 449 | 359 |
При движении МР только на энергии маховика от него отбирается постоянная мощность равная 135 Вт.
В случае, если такой дистанции окажется недостаточно, то остаточным током величиной (2,0…3,0) А не полностью разряженного электрохимического аккумулятора можно достаточно быстро в течение около 5 мин полностью «зарядить» маховик, раскрутив его до максимальной частоты вращения и произвести повторное перемещение МР.
Время использования МР на выполнение аварийных работ tтс в случае отказа или полной разрядки бортовых электрохимических аккумуляторов для fс = 0,04 составит
tтс = Sо / Vтс max = 359,3 с (около 6 мин),
где Vтс max – максимальная скорость ТС или МР.
Установка маховика на непрерывно меняющем своё положение роботе приводит к появлению гироскопических сил в опорах камеры маховика и воздействию гироскопического момента на машину.
Произведем оценку гироскопических воздействий на подшипниковые узлы маховика, возникающих например, при преодолении роботом стандартных лестничных маршей с углом подъема α = 30 – 35º. Относительные угловые отклонения камеры маховика должны изменяться в тех же пределах.
При въезде МР на лестничный марш, а также в конце при его преодолении, оси маховика сообщается переносная угловая скорость ![]() . Эта же угловая скорость, только меньшего значения, возникает при колебаниях корпуса или при вписывании МР в поворот. При этом создается гироскопический момент, определяемый с помощью векторного произведения
. Эта же угловая скорость, только меньшего значения, возникает при колебаниях корпуса или при вписывании МР в поворот. При этом создается гироскопический момент, определяемый с помощью векторного произведения
![]() , (9)
, (9)
где ![]() – вектор собственного кинетического момента маховика, определяемый по формуле:
– вектор собственного кинетического момента маховика, определяемый по формуле:
![]() = Iа·
= Iа·![]() . (10)
. (10)
Для транспортных машин наиболее целесообразным признано вертикальное расположение оси маховика, т.е. плоскость вращения маховика располагается параллельно плоскости дороги [6]. Подставив выражение (10) в (9) и учтя, что направления векторов ![]() и
и ![]() взаимно перпендикулярны, получим
взаимно перпендикулярны, получим
Мг = Jа∙ωа∙ωтс. (11)
Выразим гироскопический момент с учетом формулы (4) через запасаемую маховиком максимальную кинетическую энергию
Мг = 2E´а max∙(ωтс/ω´а max). (12)
При определении гироскопического момента и опорных реакций в подшипниках предположим, что поворот МР или колебания его корпуса будут происходить с угловой скоростью не превышающей ωтс = 1,0 рад/с. Для МР массой 300 кг максимальный гироскопический момент Мг, определяемый по формуле (12), составит около 77,2 Н·м (кг·м2/с2). При оптимальном расстоянии между подшипниковыми опорами данного маховика l = 0,15 м максимальные гироскопические реакции, действующие на них, составят Рг = 515 Н. Расчёт подшипников маховика необходимо производить по пределу выносливости.
Маховик указанных размеров оказывает незначительное влияние на МР. Даже при жесткой установке маховика в корпусе робота (транспортного средства), возникающий гироскопический момент приводит к малозаметному перераспределению нормальных реакций между движителями. Так, при ширине колеи МР равной 1,2 м реакции, действующие на движители, составят 64,3 Н. При полной массе МР равной 300 кг суммарные реакции на передних и задних движителях одного борта составят около 1500 Н. Таким образом, реакции возрастут на движителях одного борта на 4,3 % и соответственно уменьшатся на такую же величину на движителях другого борта, что практически не окажет влияния на управляемость МР.
Формула (12) показывает, что для снижения гироскопического момента следует увеличивать ω´а max. Однако в этом случае возникают конструктивные трудности при выполнении герметизации камеры маховика (потребуется вакуумирование, применение магнитных подшипников и сложных уплотнений для удержания смазки).
Если в качестве материала маховика выбрать графитовый композит (более перспективный и более безопасный при разрыве), то для того, чтобы накопить такое же, как у стального маховика количество энергии при тех же габаритных размерах, частота вращения маховика должна возрасти в 2,285 раза до величины 27420 мин-1. Удельная энергоемкость графитового композита составляет 30 – 110 Вт·ч/кг. Масса и момент инерции маховика цилиндрической формы из композита соответственно уменьшатся до величин 2,356 кг и 0,0118 кг·м2 соответственно, так как плотность материала (ρ = 1500 кг/м3), т.е. в 5,22 раза меньше, чем у стали. Уменьшение момента инерции маховика при одновременном повышении частоты его вращения приведет к снижению в 2,285 раза гироскопических нагрузок на подшипниковые опоры. Однако, как следствие, при этом возрастут потери холостого хода в приводе (в полюсах зацепления шестерен, в подшипниковых узлах, в уплотнениях, аэродинамические потери), что, в конечном счете, приведет к снижению КПД аккумулирующей системы в целом. Кроме того, такой аккумулирующий модуль будет стоить гораздо дороже, поскольку стоимость композитных материалов постоянно растет [7]. По данным зарубежных источников стоимость композитного материала в 10 раз превосходит стоимость стали, при этом технология изготовления маховика из композита существенно сложнее.
Выводы:
1. Использование маховика в качестве вспомогательного источника энергии в системе мобильный робот – электрохимические аккумуляторы позволит повысить долговечность аккумуляторов, в том числе за счет снижения пиковых нагрузок при пусковых режимах.
2. Ориентировочные расчеты показали, что время непрерывной работы МР при использовании только маховика (без подзарядки аккумуляторов от зарядно-выпрямительных устройств) увеличится на 40 – 50%.
3. Применение электромеханического аккумулятора позволит роботу скрытно выдвигаться на позицию для выполнения опасных работ и обеспечит его вспомогательным источником энергопитания в аварийных ситуациях.
4. Безусловно, применение маховика с приводом в системе электрохимический аккумулятор – МР потребует дополнительных затрат, однако, при этом робот приобретёт совершенно новые свойства.
Список литературы
1. Корсунский В.А., Наумов В.Н. Перспективы развития военных мобильных робототехнических комплексов наземного базирования в России // Вестник МГТУ им. Н.Э. Баумана. Электрон. журн. 2012. № 10. С. 168-176. Режим доступа: http://engjournal.ru/articles/413/413.pdf (дата обращения 25.04.2013).
2. Trevelyan J.P., Kang S.C., Hamel W.R. Robotics in hazardous applications // Springer Handbook of Robotics / Eds B. Siciliano, O. Khatib. Berlin: Springer-Verlag, 2008. P. 1101-1126. DOI: 10.1007/978-3-540-30301-5_49
3. Маховичный аккумулятор энергии транспортных гусеничных машин : учеб. пособие / Н.А. Забавников, В.А. Корсунский, А.Н. Герасимов, С.Ю. Иванов. М.: МВТУ им. Н.Э. Баумана. 1984. 44 с.
4. Джента Дж. Накопители кинетической энергии. Теория и практика современных маховичных систем. М.: Мир, 1988. 430 с.
5. Hanlon M. Volvo touts mechanical KERS for future road cars (but fails to mention partners Flybrid & Torotrak) // Gizmag.com. 2011. June 1. Режим доступа: http://www.gizmag.com/volvo-touts-mechanical-kers-technology-for-road-cars/18772/ (дата обращения 14.03 2013).
6. Забавников Н.А., Корсунский В.А., Герасимов А.Н. Динамика гусеничной машины с маховичным аккумулятором энергии : учеб. пособие. М.: МВТУ им. Н.Э. Баумана. 1987. 44 с.
7. Jonson T. Why Raw Composite Material Prices Increase // About.com Guide. Режим доступа: http://composite.about.com/od/materialsanddistributors/a/Why-Raw-Composite-Material-Prices-Increase.htm (дата обращения 14.03 2013).
Публикации с ключевыми словами: мобильные наземные роботы, обезвреживание взрывоопасных предметов, маховичный аккумулятор энергии, энергоёмкость маховика, плотность энергии
Публикации со словами: мобильные наземные роботы, обезвреживание взрывоопасных предметов, маховичный аккумулятор энергии, энергоёмкость маховика, плотность энергии
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||