научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 04, апрель 2013
DOI: 10.7463/0413.0550951
УДК 531
УДК 531.383
Россия, МГТУ им. Н.Э. Баумана
Математическая модель динамически настаиваемого гироскопа (ДНГ) с учётом упругих и неидеальных шарикоподшипниковых опор вала электродвигателя необходима для моделирования динамики ДНГ при собственной вибрации и вибрации основания, расчётов собственных частот, а также для учёта влияния конкретных дефектов на уходы гироскопа.
Математическая модель шарикоподшипников гироскопов наиболее полно разработана В.Б. Бальмонтом, В.Ф. Журавлевым и В.А. Матвеевым [1], [2], [3]. В данной статье используются работы [1], [2], [3] для построения математической модели ДНГ с учётом движения вала электродвигателя.
ДНГ рассматривается как механическая система с восемью степенями свободы. Выбор числа степеней свободы обусловлен конструктивными особенностями гироскопа. Так, шарикоподшипниковые опоры вала электродвигателя обладают большей податливостью в осевом и радиальном направлении, чем упругий подвес ротора.
Системы координат. Движение гироскопа рассматриваем на неподвижном основании.
![]() - связана с корпусом ДНГ.
- связана с корпусом ДНГ.
![]() - совпадает с невозмущенным положением вала, вращается с угловой скоростью вала электродвигателя W.
- совпадает с невозмущенным положением вала, вращается с угловой скоростью вала электродвигателя W.
![]()
![]() - связана с валом электродвигателя.
- связана с валом электродвигателя.
![]() - связана с кольцом так, что ось
- связана с кольцом так, что ось ![]() направлена по оси наименьшей жесткости упругого подвеса, соединяющего кольцо с валом.
направлена по оси наименьшей жесткости упругого подвеса, соединяющего кольцо с валом.
![]() - связана с ротором.
- связана с ротором.
Принято, что оси систем координат ![]() ,
, ![]() являются главными центральными осями инерции кольца и ротора.
являются главными центральными осями инерции кольца и ротора.
Угловые координаты. В качестве углов, определяющих положение вала электродвигателя, кольца подвеса и ротора относительно корпуса ДНГ, выберем следующие углы поворотов:
![]() - угол поворота вала электродвигателя относительно корпуса ДНГ вокруг оси
- угол поворота вала электродвигателя относительно корпуса ДНГ вокруг оси ![]() ,
, ![]() - угол поворота вала вокруг оси
- угол поворота вала вокруг оси ![]() ,
, ![]() - угол поворота вала вокруг оси
- угол поворота вала вокруг оси ![]() ,
, ![]() - угол поворота кольца вместе с ротором вокруг оси
- угол поворота кольца вместе с ротором вокруг оси ![]() внутреннего упругого элемента подвеса,
внутреннего упругого элемента подвеса, ![]() - угол поворота ротора вокруг оси
- угол поворота ротора вокруг оси ![]() наружного упругого элемента подвеса.
наружного упругого элемента подвеса.
Угловая скорость вращения вала электродвигателя ![]() поддерживается постоянной с высокой точностью, поэтому угол поворота вала электродвигателя
поддерживается постоянной с высокой точностью, поэтому угол поворота вала электродвигателя ![]() в данной модели ДНГ считается циклической координатой.
в данной модели ДНГ считается циклической координатой.
Переходы между системами координат. Преобразования координат выражаются следующими матричными соотношениями
 (1)
(1)
где ![]() - матрицы поворотов (матрицы направляющих косинусов).
- матрицы поворотов (матрицы направляющих косинусов).
Определим матрицы поворотов ![]() , используя рисунки 1÷5:
, используя рисунки 1÷5:
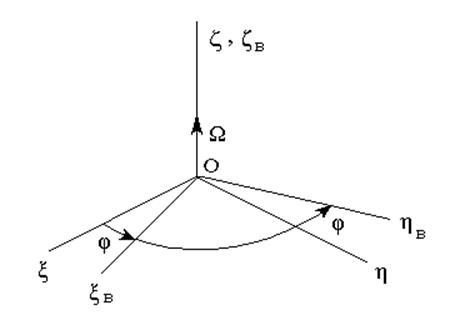
Рис. 1. Поворот вала вокруг оси ![]() .
.
Матрица поворота  (2)
(2)
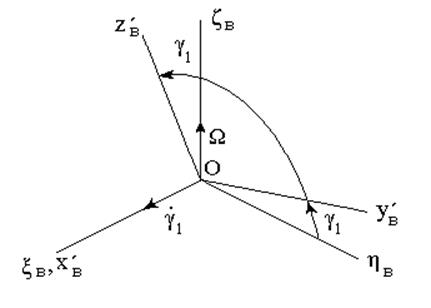
Рис. 2. Поворот вала вокруг оси ![]() .
.
Матрица поворота  (3)
(3)
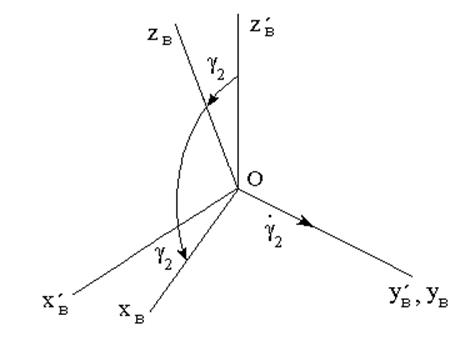
Рис. 3. Поворот вала вокруг оси ![]() .
.
Матрица поворота  (4)
(4)
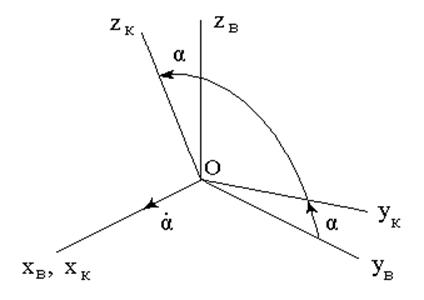
Рис. 4. Поворот кольца вместе с ротором вокруг оси ![]() .
.
Матрица поворота  (5)
(5)

Рис. 5. Поворот ротора вокруг оси ![]() .
.
Матрица поворота  (6)
(6)
Определение угловых скоростей. Определим проекции абсолютной угловой скорости вала ![]() ; кольца
; кольца ![]() и ротора
и ротора ![]() на оси связанных с ними систем координат
на оси связанных с ними систем координат ![]() соответственно. Будем использовать матрицы поворотов (3)÷(5).
соответственно. Будем использовать матрицы поворотов (3)÷(5).
Проекции угловой скорости вала электродвигателя
 (7)
(7)
Проекции угловой скорости кольца
 (8)
(8)
Проекции угловой скорости ротора
 (9)
(9)
Движение центра масс вала, кольца и ротора. Линейные координаты и скорости. Вследствие деформаций шарикоподшипниковых опор вала электродвигателя, наряду с угловым движением возможно и поступательное движение вала, кольца подвеса и ротора. Будем рассматривать движение в плоскости, перпендикулярной оси вращения вала (радиальное движение), и вдоль оси вращения вала (осевое движение). Примем, что в рассматриваемом гироскопе совпадают центры масс ротора, кольца и вала. Деформации упругого подвеса малы, поэтому при поворотах кольца и ротора относительно вала не меняется взаимное положение центров масс.
В этом случае радиальное перемещение вала относительно корпуса будет определяться координатами x и y, а осевое перемещение вала относительно корпуса будет определяться координатой z.
Пусть ![]() - вектор скорости движения центра масс. Проекции
- вектор скорости движения центра масс. Проекции ![]() на оси системы координат
на оси системы координат ![]() вычисляются по формуле
вычисляются по формуле
![]() (10)
(10)
Таким образом, скорость центра масс будет определяться
![]() (11)
(11)
Кинетическая энергия ДНГ. Введем для ротора, кольца подвеса и вала следующие обозначения:
![]() масса ротора, кольца и вала соответственно,
масса ротора, кольца и вала соответственно, ![]() главные экваториальные и осевой моменты инерции ротора,
главные экваториальные и осевой моменты инерции ротора, ![]() главные экваториальные и осевой моменты инерции кольца,
главные экваториальные и осевой моменты инерции кольца, ![]() главные экваториальные и осевой моменты инерции вала.
главные экваториальные и осевой моменты инерции вала.
Для симметричного ротора, колец и вала экваториальные моменты инерции равны: ![]() .
.
Кинетическая энергия T складывается из кинетической энергии вращательного движения ротора, кольца, вала ![]() и кинетической энергии поступательного движения ротора, кольца и вала вдоль оси вращения вала и в плоскости, перпендикулярной оси вращения вала
и кинетической энергии поступательного движения ротора, кольца и вала вдоль оси вращения вала и в плоскости, перпендикулярной оси вращения вала ![]() :
:
![]() (12)
(12)
Кинетическая энергия ![]() записывается в следующем виде
записывается в следующем виде
 (13)
(13)
где i - ротор, кольцо и вал.
Кинетическая энергия ![]() записывается в следующем виде
записывается в следующем виде
![]() (14)
(14)
Потенциальная энергия ДНГ. Потенциальная энергия гироскопа при его перемещениях складывается из энергии упругой деформации подвеса и шарикоподшипникого узла, энергии, зависящей от положения центров масс вала, кольца подвеса и ротора в гравитационном поле.
Потенциальная энергия упругой деформации подвеса
![]() (15)
(15)
где ![]() - жесткости подвеса кольца и ротора.
- жесткости подвеса кольца и ротора.
Потенциальная энергия упругой деформации шарикоподшипникого узла вала электродвигателя определяется согласно [2, 3] по формуле
 (16)
(16)
где:
КГ – константа Герца, одинаковая для обоих подшипников,
τ - угол контакта, одинаковый для обоих подшипников,
r – радиус окружности, по которой движутся шарики,
![]() осевые натяги первого и второго подшипников,
осевые натяги первого и второго подшипников,
![]() углы, определяющие положение i-го шарика в первом и втором подшипниках относительно неподвижной системы координат.
углы, определяющие положение i-го шарика в первом и втором подшипниках относительно неподвижной системы координат.
![]() - вектор коэффициентов влияния первого подшипника,
- вектор коэффициентов влияния первого подшипника,
![]() - вектор коэффициентов влияния второго подшипника,
- вектор коэффициентов влияния второго подшипника,
![]() - дефект подшипника, вычисляется по формуле
- дефект подшипника, вычисляется по формуле
 (17)
(17)
где: ![]() - амплитуды и фазы разложений в ряды Фурье поверхностей,
- амплитуды и фазы разложений в ряды Фурье поверхностей, ![]() - угловая скорость сепаратора относительно наружного кольца,
- угловая скорость сепаратора относительно наружного кольца, ![]() - угловая скорость сепаратора относительно внутреннего кольца,
- угловая скорость сепаратора относительно внутреннего кольца, ![]() - угловая скорость шарика, n – количество шариков в подшипнике, s – индекс, характеризующий тип дефекта.
- угловая скорость шарика, n – количество шариков в подшипнике, s – индекс, характеризующий тип дефекта.
Для получения уравнений вибрации ДНГ, преобразуем потенциальную энергию упругой деформации шарикоподшипникого узла вала к линейной части и квадратичной форме
 (18)
(18)
или, используя скалярные произведения векторов, получим
 (19)
(19)
где:![]() - суммарная масса подвижных частей,
- суммарная масса подвижных частей,
 - осевая жесткость ДНГ,
- осевая жесткость ДНГ,
 - радиальная жесткость ДНГ,
- радиальная жесткость ДНГ,
![]() - угловая жесткость ДНГ,
- угловая жесткость ДНГ,
![]() - коэффициент, характеризующий перекрёстные связи,
- коэффициент, характеризующий перекрёстные связи,

Пусть вектор ![]() задается в проекциях на оси системы координат
задается в проекциях на оси системы координат ![]() , связанной с корпусом. Вектор
, связанной с корпусом. Вектор ![]() в проекциях на оси системы координат
в проекциях на оси системы координат ![]() определяется выражением
определяется выражением
 (20)
(20)
Потенциальная энергия ДНГ в гравитационном поле имеет вид
 (21)
(21)
Для вычисления обобщённых сил необходимо найти производные (22)
 (22)
(22)
Обобщённые силы имеют вид
 (23)
(23)
Уравнения вибрации ДНГ.
При определении производных от кинетической энергии будем считать переменные ![]() и их производные малыми.
и их производные малыми.

 (24)
(24)
Выводы.
Получены уравнения вибрации ДНГ с учётом упругих и неидеальных шарикоподшипниковых опор вала электродвигателя, необходимые для моделирования динамики ДНГ при собственной вибрации, расчётов собственных частот, а также для учёта влияния конкретных дефектов на уходы гироскопа. Уравнения вибрации ДНГ учитывают угловое и поступательное движение ротора, колец и вала привода ДНГ.
Список литературы
1. Журавлев В.Ф. Теория вибрации гироскопов. М.: Ин-т проблем механики АН СССР, 1972. 48 с. (Препринт; № 22).
2. Бальмонт В.Б., Матвеев В.А. Опоры качения приборов. М.: Машиностроение, 1984. 240 с.
3. Журавлев В.Ф., Бальмонт В.Б. Механика шарикоподшипников гироскопов. М., Машиностроение, 1986. 272 с.
Публикации с ключевыми словами: динамически настраиваемый гироскоп, вибрация шарикоподшипников, дефекты шарикоподшипников
Публикации со словами: динамически настраиваемый гироскоп, вибрация шарикоподшипников, дефекты шарикоподшипников
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||