научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 04, апрель 2013
DOI: 10.7463/0413.0547801
УДК 621.396.6
НИИ Радиоэлектронной техники МГТУ им. Н.Э. Баумана
В современных бортовых радиолокационных станциях (БРЛС) операции пространственной и временной обработки сигналов разделены. Задачи пространственной обработки решаются антенной системой, формирующей диаграмму направленности с заданными характеристиками. При временной обработке реализуются операции согласованной фильтрации сигналов. Для обеспечения максимальной дальности обнаружения целей не только на встречных, но и на догонных курсах используется адаптация параметров зондирующего сигнала - применение когерентных импульсных сигналов с высокими частотами повторения (ВЧП) при обнаружении целей на встречных курсах и когерентных импульсных последовательностей со средними частотами повторения (СЧП) – при обнаружении целей на догонных курсах [1]. Это связано с тем, что обнаружение целей в БРЛС всегда осуществляется на фоне отражений от подстилающей поверхности, причем при обнаружении целей на встречных курсах полезные сигналы и отражения от подстилающей поверхности селектируются по частоте. При обнаружении целей на догонных курсах полезные сигналы и отражения от подстилающей поверхности не селектируются ни по доплеровскому сдвигу частоты, ни по запаздыванию. В этой ситуации для снижения потерь, обусловленных отражениями от подстилающей поверхности, применяются последовательности с СЧП. Однако обеспечиваемая при этом дальность недостаточна для эффективного обнаружения малоскоростных низколетящих целей [1, 2].
В настоящее время в БРЛС все шире применяются многоканальные активные фазированные антенные решетки (ФАР) [1]. Многоканальные ФАР позволяют реализовывать алгоритмы совместной пространственно-временной обработки, ориентированные на выделение полезных сигналов на фоне распределенных помех [3, 4].
Цель статьи - оценить эффективность пространственно-временной обработки сигналов в бортовых радиолокационных станциях cфазированными антенными решетками для решения задач селекции и обнаружения целей (в том числе малоскоростных) на догонных курсах.
Эффективность будем оценивать путем сравнения характеристик многоканальных импульсно-доплеровских БРЛС, в которых реализованы:
а) алгоритмы совместной пространственно-временной обработки;
б) независимые пространственные и временные алгоритмы обработки.
Обобщенная структурная схема импульсно-доплеровской БРЛС с ФАР и пространственно-временной обработкой информации представлена на рисунке 1 [3, 4].
Предполагается, что антенная решетка имеет Nстрок в горизонтальной плоскости и Lстрок - в вертикальной, а приемное устройство содержит ![]() приемных каналов. Сигналы каждого канала поступают на трансверсальные фильтры, включающие линии задержки с М
приемных каналов. Сигналы каждого канала поступают на трансверсальные фильтры, включающие линии задержки с М ![]() отводами, отсчеты с выходов которых суммируются с весовыми коэффициентами
отводами, отсчеты с выходов которых суммируются с весовыми коэффициентами ![]() , где
, где ![]() - период повторения импульсов в последовательности;
- период повторения импульсов в последовательности; ![]() -
- ![]() интервал времен когерентного накопления. Зондирующий сигнал - когерентная последовательность импульсов со средними частотами повторения.
интервал времен когерентного накопления. Зондирующий сигнал - когерентная последовательность импульсов со средними частотами повторения.
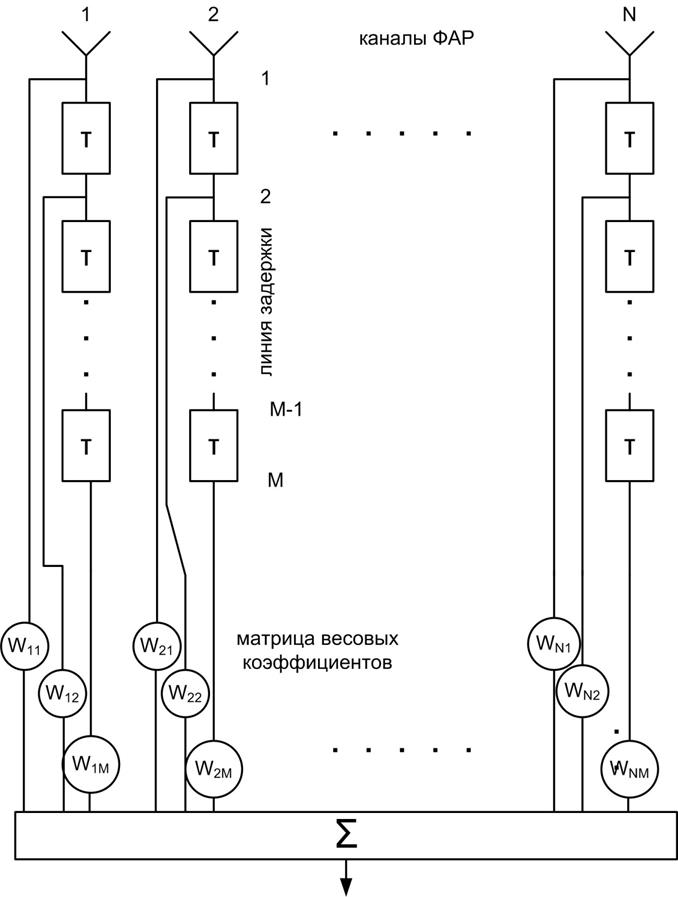
Рисунок. 1. Схема пространственно-временной обработки сигналов (показан один канал по дальности и по скорости для одной из линеек излучателей в азимутальной плоскости).
Выходной сигнал приемного устройства БРЛС при пространственно-временной обработке равен:
![]() , (1)
, (1)
где: ![]() - вектор отсчетов входного сигнала;
- вектор отсчетов входного сигнала;![]()
![]() - оператор тензорного произведения;
- оператор тензорного произведения; ![]() - оператор комплексного сопряжения и транспонирования;
- оператор комплексного сопряжения и транспонирования;
![]() , где
, где  ;
;
![]() , где
, где  ;
;
![]() , где
, где  ;
;
![]() и
и![]() - вектора, характеризующие распределение принимаемого поля по элементам ФАР в азимутальной и угломестной плоскости соответственно;
- вектора, характеризующие распределение принимаемого поля по элементам ФАР в азимутальной и угломестной плоскости соответственно; ![]() и
и ![]() - величины, характеризующие фазовый сдвиг сигналов, принимаемых соседними элементами ФАР при отклонении источника сигнала на угол
- величины, характеризующие фазовый сдвиг сигналов, принимаемых соседними элементами ФАР при отклонении источника сигнала на угол ![]() - в азимутальной и
- в азимутальной и ![]() - в угломестной плоскостях соответственно;
- в угломестной плоскостях соответственно; ![]() - длина волны несущего колебания;
- длина волны несущего колебания; ![]() - расстояния между элементами ФАР в азимутальной и угломестной плоскостях соответственно,
- расстояния между элементами ФАР в азимутальной и угломестной плоскостях соответственно, ![]() - вектор, характеризующий временную последовательность принимаемых импульсов;
- вектор, характеризующий временную последовательность принимаемых импульсов; ![]() - доплеровский сдвиг частоты принимаемого сигнала,
- доплеровский сдвиг частоты принимаемого сигнала, ![]() - частота повторения зондирующих импульсов (
- частота повторения зондирующих импульсов ( ),
), ![]() - амплитуда принимаемого сигнала,
- амплитуда принимаемого сигнала, ![]() - оператор транспонирования.
- оператор транспонирования.
Будем предполагать, что в качестве критерия оптимизации используется максимум отношения сигнал/(шум+помеха) на выходе приемного устройства. Тогда алгоритм вычисления весовых коэффициентов ![]() может быть записан в виде [4,5]:
может быть записан в виде [4,5]:
![]() , (2)
, (2)
где ![]() - некоторый постоянный коэффициент;
- некоторый постоянный коэффициент; ![]() - ковариационная матрица помех:
- ковариационная матрица помех: ![]() ;
; ![]() - ковариационные матрицы мешающих сигналов на входе БРЛС и собственного шума приемных каналов соответственно; n - вектор шумовых отсчетов;
- ковариационные матрицы мешающих сигналов на входе БРЛС и собственного шума приемных каналов соответственно; n - вектор шумовых отсчетов; ![]() - опорный вектор, характеризующий угловое направление и доплеровский сдвиг частоты предполагаемой цели:
- опорный вектор, характеризующий угловое направление и доплеровский сдвиг частоты предполагаемой цели:
![]() ,
,  ,
,  ,
,  ;
;
![]() - направление на цель в азимутальной плоскости;
- направление на цель в азимутальной плоскости; ![]() - направление на цель в угломестной плоскости;
- направление на цель в угломестной плоскости; ![]() - ожидаемый доплеровский сдвиг частоты сигнала, отраженного от цели.
- ожидаемый доплеровский сдвиг частоты сигнала, отраженного от цели.
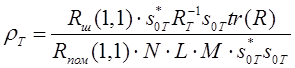
Характеристики БРЛС при пространственно-временной обработке будем оценивать показателем ![]() (в англоязычной литературе принято обозначение - IF[3, 4]), равным отношению сигнал/(шум+помеха) на выходе к отношению сигнал/(шум+помеха) на входе, нормированным величиной
(в англоязычной литературе принято обозначение - IF[3, 4]), равным отношению сигнал/(шум+помеха) на выходе к отношению сигнал/(шум+помеха) на входе, нормированным величиной  :
:
 , (3)
, (3)
где tr(R) - след матрицы R, ![]() ,
, ![]() -амплитуда сигнала цели,
-амплитуда сигнала цели,  - отношение помеха/шум на входе приемного устройства.
- отношение помеха/шум на входе приемного устройства.
Физически ![]() может быть интерпретирована как величина, характеризующая потери при обнаружении сигнала цели за счет влияния отражений от подстилающей поверхности (при
может быть интерпретирована как величина, характеризующая потери при обнаружении сигнала цели за счет влияния отражений от подстилающей поверхности (при ![]() = 0 дБ - обнаружение происходит на фоне собственных шумов приемного устройства).
= 0 дБ - обнаружение происходит на фоне собственных шумов приемного устройства).
Обобщенная структурная схема алгоритма обработки информации в импульсно-доплеровской БРЛС с разделением процедур пространственной и временной обработки приведена на рисунке 2 [1]. На этой схеме пространственная фильтрация обеспечивается схемой формирования луча, выполняющей операции суммирования сигналов всех элементов антенной решетки с весовыми коэффициентами: ![]() , которые обеспечивают требуемую ориентацию диаграммы направленности (ДН) ФАР. В процессе временной обработки выполняется согласованная фильтрация принимаемого сигнала, заключающаяся во временном стробировании, внутриимпульсной обработке, и когерентном накоплении отсчетов [1, 2, 6].
, которые обеспечивают требуемую ориентацию диаграммы направленности (ДН) ФАР. В процессе временной обработки выполняется согласованная фильтрация принимаемого сигнала, заключающаяся во временном стробировании, внутриимпульсной обработке, и когерентном накоплении отсчетов [1, 2, 6].
Для оценки характеристик БРЛС с ФАР и разделением процедур пространственной и временной обработки в (3) вектор ![]() заменим на
заменим на ![]() :
:
![]() ,
,
где матрица Tпредставляется в виде:
![]() . (4)
. (4)
Здесь ![]() - описывает процедуру доплеровской фильтрации сигнала:
- описывает процедуру доплеровской фильтрации сигнала:![]() ;
;
![]() - описывает процедуру формирования ДН ФАР в угломестной плоскости:
- описывает процедуру формирования ДН ФАР в угломестной плоскости: ![]() ;
;
![]() - описывает процедуру формирования ДН ФАР в азимутальной плоскости:
- описывает процедуру формирования ДН ФАР в азимутальной плоскости: ![]() ;
;
![]() и
и ![]() - единичные матрицы порядка NL и Nсоответственно.
- единичные матрицы порядка NL и Nсоответственно.
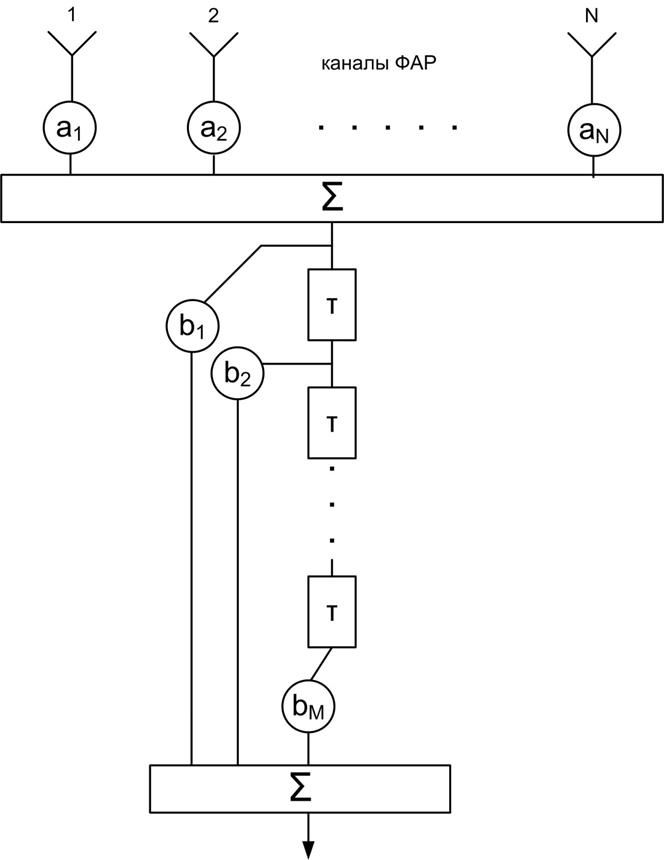
Рисунок 2. Схема обработки сигналов в импульсно-доплеровской РЛС (показан один канал по дальности и по скорости для i-ой линейки излучателей в азимутальной плоскости).
Тогда для вектора ![]() :
: ![]() ,
, ![]() и для рассматриваемого случая разделения пространственной и временной обработок выражение для показателя
и для рассматриваемого случая разделения пространственной и временной обработок выражение для показателя ![]() принимает вид:
принимает вид:
 (5)
(5)
Воспользовавшись (3) и (5), сравним характеристики рассматриваемых БРЛС при следующих условиях:
Параметры БРЛС: | |
Сигнал - когерентная импульсная последовательность со следующими параметрами: | |
Скважность | 10 |
длительность импульса | 3,3 мкс |
модуляция импульса | ФМ, код Баркера,13 |
частота повторения импульсов | 30 кГц |
Время | 2 мс (60 импульсов) |
Длина волны несущего колебания | 3 см |
Расстояние между элементами решетки, | 1,5 см |
Кол-во элементов ФАР в азимутальной плоскости, N | 10 шт. |
Кол-во элементов ФАР в угломестной плоскости, L | 6 шт. |
Коэффициент ослабления заднего бокового лепестка | подавлен полностью |
Тактическая ситуация | |
Азимут цели, | 0 град |
Угол места цели, | 10 град |
Высота полета носителя, Ha | 1000 м |
Скорость носителя, Va | 200м/с (0,6 М) |
Сравнение будем проводить методом математического моделирования.
При моделировании отражений от подстилающей поверхности последняя представлялась в виде совокупности кольцевых зон (рисунок 3), соответствующих стробам дальности, каждая из которых разбивалась на фацеты [2]. Ширина кольцевой зоны определялась разрешающей способностью БРЛС.
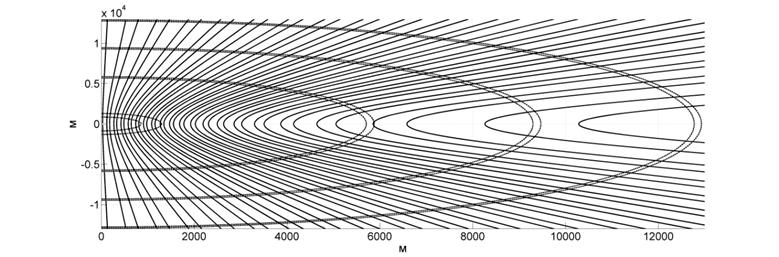
Рисунок 3. Структура мешающих отражений от земной поверхности: кольцевые зоны - области земной поверхности, отражения от которых попадают в один строб дальности; гиперболы - линии равного доплеровского сдвига частоты ("изодопы").
На рисунке 4 изображены кривые ![]() и
и ![]() как функции от
как функции от ![]() . Видно, что кривая
. Видно, что кривая ![]() имеет ярко выраженный провал на частоте
имеет ярко выраженный провал на частоте  , соответствующий отражениям от участка подстилающей поверхности, облучаемого основным лепестком ДН ФАР. В остальной области частот функция
, соответствующий отражениям от участка подстилающей поверхности, облучаемого основным лепестком ДН ФАР. В остальной области частот функция ![]() близка к 0 дБ, что соответствует практическому отсутствию влияния отражений от подстилающей поверхности на характеристики обнаружения.
близка к 0 дБ, что соответствует практическому отсутствию влияния отражений от подстилающей поверхности на характеристики обнаружения.
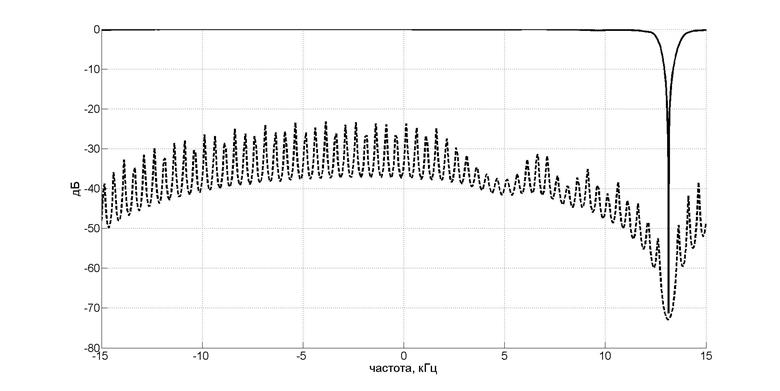
Рисунок 4. Вид кривых ![]() - сплошная линия и
- сплошная линия и![]() - штриховая линия.
- штриховая линия.
При раздельной обработке уровень потерь ![]() весьма значителен и, при изменении частоты носит пульсирующий характер. Это обусловлено структурой боковых лепестков доплеровского фильтра
весьма значителен и, при изменении частоты носит пульсирующий характер. Это обусловлено структурой боковых лепестков доплеровского фильтра  . Уменьшить потери можно используя «весовую» обработку. Для оценки потерь при использовании «весовой» обработки матрицы
. Уменьшить потери можно используя «весовую» обработку. Для оценки потерь при использовании «весовой» обработки матрицы ![]() ,
, ![]() ,
, ![]() , описывающие
, описывающие ![]() , преобразуем следующим образом:
, преобразуем следующим образом:
![]() ;
; ![]() ;
; ![]() ;
;
![]() - оператор поэлементного умножения матриц;
- оператор поэлементного умножения матриц; ![]() - вектор весовых коэффициентов 1хN«окна» Чебышева с уровнем боковых лепестков (УБЛ) -90 дБ;
- вектор весовых коэффициентов 1хN«окна» Чебышева с уровнем боковых лепестков (УБЛ) -90 дБ; ![]() и
и ![]() вектора весовых коэффициентов 1xL и 1xN соответственно окна Чебышева с УБЛ -40 дБ. Зависимости
вектора весовых коэффициентов 1xL и 1xN соответственно окна Чебышева с УБЛ -40 дБ. Зависимости ![]() и
и![]() - с применением весовой обработки представлены на рисунке 5.
- с применением весовой обработки представлены на рисунке 5.
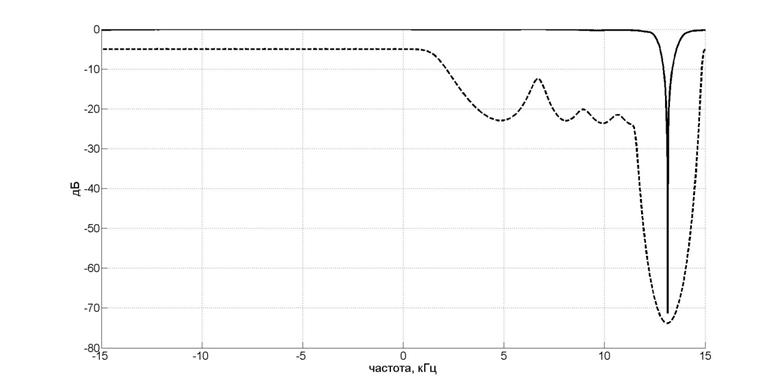
Рисунок 5. Вид кривых ![]() - сплошная линия и
- сплошная линия и![]() - штриховая линия (с применением весовой обработки).
- штриховая линия (с применением весовой обработки).
Из рисунка видно, что при независимых процедурах пространственной и временной обработки применение «взвешивания» позволяет несколько улучшить характеристики БРЛС в рассматриваемой области. Однако потери остаются весьма значительными.
Недостаток алгоритмов адаптивной пространственно-временной обработки - большая размерность ковариационной матрицы,![]() что существенно затрудняет их реализацию (для рассматриваемого случая - 3600х3600). Для снижения размерности рассмотрим характеристики алгоритмов пространственно-временной обработки при предварительном формировании ДН в угломестной плоскости. Это приводит к некоторому снижению размерности ковариационной матрицы помех от земли (600х600), что соответствует снижению вычислительной сложности алгоритма адаптации на 2 порядка. Матрица трансформации Tпримет вид:
что существенно затрудняет их реализацию (для рассматриваемого случая - 3600х3600). Для снижения размерности рассмотрим характеристики алгоритмов пространственно-временной обработки при предварительном формировании ДН в угломестной плоскости. Это приводит к некоторому снижению размерности ковариационной матрицы помех от земли (600х600), что соответствует снижению вычислительной сложности алгоритма адаптации на 2 порядка. Матрица трансформации Tпримет вид: ![]() ,
, ![]() .
.
В этом случае, за счет неоднозначности измерений, свойственных сигналу - когерентная импульсная последовательность с СЧП, при обнаружении сигнала с параметрами ![]() начинает сказываться неоднозначность: начинают влиять мешающие отражения, формируемыми элементами поверхности, имеющими доплеровский сдвиг частоты отраженного сигнала
начинает сказываться неоднозначность: начинают влиять мешающие отражения, формируемыми элементами поверхности, имеющими доплеровский сдвиг частоты отраженного сигнала  , и наклонную дальность
, и наклонную дальность ![]() , где:
, где:![]() м/с; k, i - целочисленные параметры:
м/с; k, i - целочисленные параметры:  ,
, ![]() .
.
На рисунке 6 для рассматриваемой тактической ситуации изображены графики ![]() и
и ![]() как функции от
как функции от ![]() .
.
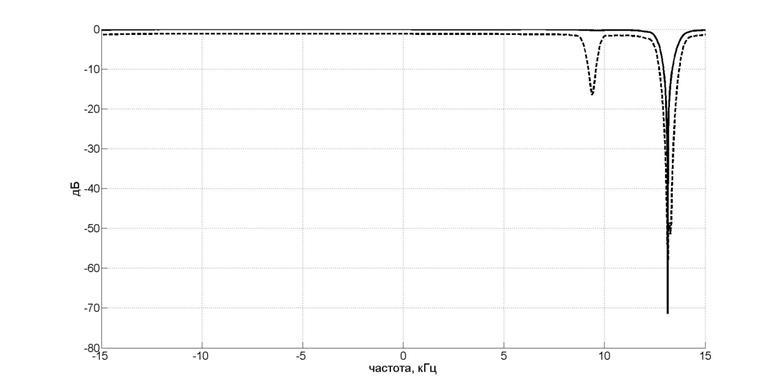
Рисунок 6. Вид кривых ![]() - сплошная линия и
- сплошная линия и![]() - штриховая линия при адаптивной пространственно-временной обработке с предварительным формированием ДН ФАР в угломестной плоскости.
- штриховая линия при адаптивной пространственно-временной обработке с предварительным формированием ДН ФАР в угломестной плоскости.
Из рисунка видно, что кривая ![]() имеет два провала: первый, имеющий минимальный доплеровский сдвиг частоты, обусловлен отражениями от кольцевой зоны подстилающей поверхности, наиболее близкой к вертикали (он не компенсируется линейной антенной решеткой); второй - связан с отражениями от всех остальных кольцевых зон, расположенных под меньшими углами места. Следует отметить, что, поскольку эти отражения формируются элементами поверхности, существенно отличающимися по углу места, в одномерной решетке они не могут быть подавлены. Поэтому для достижения характеристик адаптивных пространственно-временных алгоритмов, близких к оптимальным при наличии неоднозначности, необходимо использовать имеющиеся в ФАР степени свободы в угломестной плоскости.
имеет два провала: первый, имеющий минимальный доплеровский сдвиг частоты, обусловлен отражениями от кольцевой зоны подстилающей поверхности, наиболее близкой к вертикали (он не компенсируется линейной антенной решеткой); второй - связан с отражениями от всех остальных кольцевых зон, расположенных под меньшими углами места. Следует отметить, что, поскольку эти отражения формируются элементами поверхности, существенно отличающимися по углу места, в одномерной решетке они не могут быть подавлены. Поэтому для достижения характеристик адаптивных пространственно-временных алгоритмов, близких к оптимальным при наличии неоднозначности, необходимо использовать имеющиеся в ФАР степени свободы в угломестной плоскости.
Из полученных данных следует, что применение пространственно-временной обработки позволяет:
- обеспечить уменьшение энергетических потерь за счет влияния отражений от подстилающей поверхности настолько, что дальности обнаружения целей на догонных курсах становятся близкими к дальности обнаружения цели на встречных курсах;
- существенно сузить частотный диапазон, в котором сказывается влияние помех от земли, и тем самым обеспечить решение задачи обнаружения малоскоростных целей.
Список литературы:
1. Дудник П.И., Кондратенков Г.С., Татарский Б.Г., Ильчук А.Р., Герасимов А.А. Авиационные радиолокационные комплексы и системы: учебник для слушателей и курсантов ВУЗов ВВС / Под ред. П.И. Дудника. М.: Изд-во ВВИА им. проф. Жуковского, 2006. 1112 с.
2. Skolnik M. Radar Handbook. 3rd ed. The McGraw-Hill Companies, 2008. (на англ.).
3. Guerci J.R. Space-Time Adaptive Processing for Radar. 1st ed. Artech House, London, 2003. 187 p. (наангл.).
4. Klemm R. Principles of Space-Time Adaptive Processing. 3rd ed. The Institution of Engineering and Technology, London, 2006. 670 p. (наангл.).
5. Монзинго Р.А., Миллер Т.У. Адаптивные антенные решетки: Введение в теорию: пер. с англ. М.: Радио и связь, 1986. 448 с.
6. Васин В.А., Власов И.Б., Егоров Ю.М., Калмыков В.В., Кузнецов А.А., Николаев А.И., Пудловский В.Б., Родзивилов В.А., Себекин Ю.Н., Сенин А.И., Слукин Г.П., Федоров И.Б. Информационные технологии в радиотехнических системах: учеб. пособие / под ред. И.Б. Федорова. М.: Изд-во МГТУ им. Н.Э. Баумана, 2003. 672 с.(Информатика в техническом университете).
Публикации с ключевыми словами: станция радиолокационная бортовая, решетка антенная многоканальная, обработка пространственно-временная, сигнал когерентный импульсный, отношение сигнал/(шум+помеха от подстилающей поверхности)
Публикации со словами: станция радиолокационная бортовая, решетка антенная многоканальная, обработка пространственно-временная, сигнал когерентный импульсный, отношение сигнал/(шум+помеха от подстилающей поверхности)
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||