научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 03, март 2013
DOI: 10.7463/0313.0542271
УДК 62-83:621.313.8
Россия, МГТУ им. Н.Э. Баумана, Москва
Введение
В большегрузных автономных транспортных средствах с электромеханической трансмиссией в качестве источника электропитания тяговых электродвигателей (ТЭД), создающих вращающий момент колес, применяют тяговый мотор-генератор (ТМГ) [1-4]. Его вал соединен с валом дизельного двигателя внутреннего сгорания (ДВС), являющегося источником механической энергии ТМГ при его работе в генераторном режиме.
ТМГ по конструкции и принципу действия в соответствии с классификацией энергетических электрических машин, если не принимать в рассмотрение коллекторные генераторы постоянного тока, представляет собой вентильный генератор. Он состоит из бесконтактной электрической машины (ЭМ) и полупроводникового силового выпрямителя (ВС) [5]. Тип ЭМ в вентильном генераторе, как и тип его ВС, могут быть различным. В зависимости от назначения вентильных генераторов в них используются асинхронные ЭМ, синхронные ЭМ с постоянными магнитами и с независимым возбуждением, а также синхронные вентильно-индукторные ЭМ с независимым возбуждением и с самовозбуждением [1-6]. ВС в вентильном генераторе может быть неуправляемым и управляемым.
Такое многообразие ЭМ и ВС затрудняет выбор структуры ВГ для использования в качестве ТМГ автономного транспортного средства, и поэтому оптимальное решение этой задачи пока технически не обосновано. Однако, если оценивать массогабаритные показатели ЭМ ТМГ, то они имеют наименьшие значения у синхронных ЭМ с постоянными магнитами и асинхронных ЭМ с короткозамкнутым ротором [4,]. Анализируя схемотехнические варианты ВС, используемые совместно с этими ЭМ, следует отметить, что в ТМГ с асинхронной ЭМ устанавливают трехфазный мостовой выпрямитель с системой векторного управления, выполненный на биполярных транзисторах с изолированным затвором (БТИЗ) [4]. В ТМГ на основе синхронной ЭМ с постоянными магнитами может использоваться многофазный неуправляемый диодный ВС [5]. Такой выпрямитель по сравнению с выпрямителем на БТИЗ не требует применения специально разработанного программного обеспечения, проще в эксплуатации, имеет меньшие потери мощности и большую надежность, но его выходное напряжение не регулируется и линейно зависит от частоты вращения ДВС, которая может изменяться почти в два раза. Влияние изменения выходного напряжения ТМГ с постоянными магнитами сравнительно просто нейтрализуется и не будет отражаться на режиме работы ТЭД, если для регулирования потребляемого ими тока использовать параметрические транзисторные силовые преобразователи (ПС), инвариантные к изменению входного напряжения [7]. Поэтому, учитывая отмеченные преимущества ТМГ на основе синхронной машины с постоянными магнитами, они чаще других типов ТМГ используются в транспортных средствах с электромеханической трансмиссией.
В ТМГ обычно применяют трехфазные ЭМ с соединенными звездой обмотками и мостовые ВС [1, 2, 5, 6]. В таких ТМГ на интервале проводимости диодов ВС ток протекает только в 2/3 проводников всей обмотки ЭМ. Для полного использования проводников обмотки ЭМ она должна быть выполнена замкнутой и в трехфазной ЭМ соединяться треугольником. Но тогда выходное напряжение ТМГ уменьшится в ![]() раз, а электрические потери мощности при той же мощности ТЭД транспортного средства возрастут в 3 раза.
раз, а электрические потери мощности при той же мощности ТЭД транспортного средства возрастут в 3 раза.
Выходное напряжение ТМГ с замкнутой обмоткой ЭМ может быть повышено увеличением числа фаз обмотки [8], что позволит также уменьшить его пульсации и средние значения токов, проходящих через диоды ВС [9, 10]. Однако следует учитывать, что с увеличением числа фаз уменьшается длительность интервала проводимости диодов ВС, и возрастает относительная длительность коммутационных процессов, обусловленных индуктивностями фазных обмоток ЭМ ТМГ. Их влияние, как показано для трехфазных выпрямителей, проявляется в искажении формы кривых напряжения ЭМ, снижении выходного напряжения и мощности ТМГ [5, 9-11], которое необходимо учитывать при его проектировании. Влияние индуктивностей фазных обмоток ЭМ будет отражаться также и на характере изменения выходного напряжения ТМГ во время переходного процесса, вызванного скачкообразным изменением его нагрузки, например при подключении или отключении ТЭД.
Целью исследования является анализ степени влияния указанных физических процессов на статические и динамические характеристики ТМГ на основе девятифазной синхронной ЭМ с постоянными магнитами и замкнутой обмоткой и неуправляемого двухполупериодного мостового выпрямителя.
Методом исследования ТМГ, принимая во внимание изменяющуюся в процессе коммутации топологию обтекаемых токами его электрических цепей и сложность математического описания происходящих в них коммутационных процессов, выбрано имитационное моделирование [12, 13].
Научную новизну работы определяют разработанные имитационная модель ТМГ на основе ЭМ с постоянными магнитами и девятифазной замкнутой обмоткой, имитационная модель стенда для его испытания и результаты исследования статических и динамических характеристик ТМГ. При разработке имитационной модели ТМГ учтено условие ее совместимости с имитационной моделью ДВС для их совместного использования при исследовании статических и динамических характеристик ДВС с нагрузкой в виде ТМГ.
1. Математическое описание ТМГ на основе синхронной ЭМ с постоянными магнитами
Имитационная модель ТМГ базируется на математическом описании физических процессов вдевятифазной синхронной ЭМ с постоянными магнитами. Электрическая схема соединения ее фазных обмоток приведена на рисунке 1.

Рисунок 1 – Электрическая схема соединения фазных обмоток ЭМ ТМГ
При математическом описаниигенератора на основе синхронной машины с постоянными магнитами приняты следующие допущения:
- девятифазная синхронная ЭМ представляет собой симметричную электромеханическую систему с одинаковыми электрическими параметрами фазных обмоток;
- насыщение магнитопровода не учитывается;
- влияние реакции якоря на магнитный поток при фазных токах, не превышающих номинальные значения, в ЭМ незначительно;
- распределение магнитного поля в воздушном зазоре ЭМ обеспечивает синусоидальную форму ее фазной ЭДС;
- силовые диоды полупроводникового выпрямителя приняты идеальными;
- пульсации частоты вращения генератора из-за инерционности его ротора и маховика дизельного двигателя пренебрежимо малы.
Математические выражения ЭДС вращения каждой фазной обмотки ТМГ, основываясь на принятых допущениях, могут быть получены из следующей зависимости
![]() , (1)
, (1)
где Em = KEω – амплитуда фазной ЭДС вращения; ω = (π/30)·np- угловая частота фазных ЭДС; n – частота вращения ТМГ; p= 8 - число пар полюсов ; KE – коэффициент пропорциональности между угловой частотой и амплитудой фазных ЭДС вращения;
ψ = 2π/m – шаг угла фазового сдвига фазных ЭДС вращения смежных фазных обмоток;
k = 1, 2 … m – порядковый номер фазной обмотки.
Тогда, учитывая обозначения выводов фазных обмоток на рисунке 1, получим для каждой фазы ТМГ
|
|
|
|
|
|
|
|
| (2) |
|
|
|
|
|
|
|
|
Применяя векторное представление синусоидальных функций (2) и складывая векторы фазных ЭДС в той последовательности, в какой фазные обмотки соединены на электрической схеме, представленной на рисунке 1, получим векторную диаграмму обмотки ТМГ. Она показана на рисунке 2 и представляет собой девятиугольник.

Рисунок 2 – Векторная диаграмма ЭДС обмотки девятифазного ТМГ
В ТМГ используется девятифазный двухполупериодный мостовой выпрямитель. Его выходное напряжение создается под действием линейного напряжения, поступающего с обмотки ТМГ. В режиме работы выпрямителя, близком к холостому ходу, ток нагрузки в каждый момент времени протекает через два диода выпрямителя, один из которых находится в анодной группе диодов, а другой в катодной группе. Причем, в проводящем состоянии будут находиться два накрест лежащих диода выпрямителя, между которыми в проводящем направлении будет приложено в данный момент времени наибольшее линейное напряжение обмотки ТМГ [9, 10].
За период линейного напряжения обмотки ТМГ происходит 18 переключений диодов выпрямителя. В связи с этим, его выходное напряжение будет состоять из 18 повторяющихся участков линейных напряжений и иметь 18 пульсаций на период линейного напряжения обмотки ТМГ. Среднее значение выпрямленного напряжения ТМГ определяется по среднему значению выпрямленного напряжения за период повторяемости. В режиме холостого хода ТМГ будем иметь
 , (3)
, (3)
где Udx – выходное напряжение выпрямителя ТМГ в режиме холостого хода;
Kл = Emл/Em – коэффициент пропорциональности между фазным Em и линейным Emл напряжениями обмотки ТМГ; ![]() = ωt – угловое представление текущего времени.
= ωt – угловое представление текущего времени.
Соотношение амплитуд фазной и линейной ЭДС вращения обмотки ТМГ определим по векторной диаграмме на рисунке 2. Из нее следует, линейная ЭДС вращения Е15 представляет собой геометрическую сумму фазных ЭДС Е12, Е23, Е34, Е45 и определяется суммированием проекций векторов указанных фазных ЭДС на направление линейной ЭДС. Наиболее просто данное соотношение можно определить, воспользовавшись методом представления синусоидальных величин комплексными числами. Тогда, принимая в качестве базисной единицы амплитуду фазной ЭДС Em = 1, в относительных единицах можно записать
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
При ψ = 2π/9 получим Kл = |Eл*| = 2,879. По данным технического проекта ЭМ ТМГ Em = 220 В при n = 2100 мин-1. По (3) этому соответствует Udx = 630 В. Выходное напряжение ТМГ с постоянными магнитами, как следует из анализа выражений (1) и (3), линейно зависит от частоты вращения дизельного ДВС, вращающего ротор генератора. Влияние тока нагрузки ТМГ Id на его выходное напряжение Udпоказывает его внешняя характеристика Ud = f(Id). Она описывается выражением [5]
![]() , (4)
, (4)
где ΔUк – среднее значение коммутационного снижения выходного напряжения ТМГ; ΔUR – среднее значение падения напряжения на активном сопротивлении обмотки ЭМ ТМГ; ΔUд – среднее значение падения напряжения на диоде выпрямителя ТМГ.
Падение напряжения на диоде, вызванное током нагрузки выпрямителя ΔUд ≈ 1 В, поэтому в высоковольтных выпрямителях его значением можно пренебречь. Значения составляющих падения напряжения ΔUк и ΔUR зависят от характера и длительности протекания коммутационных процессов в схеме выпрямителя. На их величину, особенно на ΔUк, существенное влияние оказывают индуктивности Ls фазных обмоток ЭМ ТМГ. Это влияние проявляется в том, что указанные индуктивности затягивают процесс уменьшения тока до нуля в проводившем диоде выпрямителя и нарастание до значения Id тока включающегося диода. В результате в ТМГ на время коммутации диодов возникают короткозамкнутые контуры, которые приводят к искажениям фазных напряжений на обмотках ТМГ, проявляющиеся в виде возникающих на них ступенчатых провалов. В итоге все это приводит при n = const к снижению выходного напряжения ТМГ.
Падение выходного напряжения ТМГ Ud, вызванное коммутационными процессами в его выпрямителе, зависит не только от значения Ls, но и от угловой частоты фазных ЭДС ω, т.е. от частоты вращения ротора генератора, и тока нагрузки Id. Принимая во внимание, что девятифазный мостовой выпрямитель ТМГ по сути представляет собой три трехфазных мостовых выпрямителя, работающих на общую нагрузку, уравнение внешней характеристики ТМГ (4) допустимо представить в следующем виде
 , (5)
, (5)
где Xк ≈ 2Xs – индуктивное сопротивление обмотки ЭМ ТМГ во время коммутации;
Xs = ωLs – индуктивное сопротивление фазной обмотки ЭМ ТМГ при заданной частоте вращения; Ls = 16,5 10-6 Гн – индуктивность фазной обмотки; Rк ≈ 2Rs – активное сопротивление обмотки ТМГ во время коммутации; Rs = 0,006 Ом – активное сопротивление фазной обмотки.
Значения Xк и Rк определяются из опыта короткого замыкания обмотки ЭМ ТМГ.
При проведении оценочных расчетов выходного напряжения ТМГ может использоваться упрощенное выражение
 . (6)
. (6)
Более полно и точнее учесть влияние вышеперечисленных факторов на выходное напряжение ТМГ позволяет его имитационная модель. Целесообразно также использовать имитационную модель ТМГ для определения мощностей потерь при преобразовании механической энергии, получаемой от дизельного двигателя, в электрическую энергию постоянного тока. Информация о значениях мощностей потерь в ТМГ позволяет определить КПД генератора и необходимую мощность, подводимую к нему от дизельного двигателя, и, соответственно, прикладываемый к его валу, момент. Расчет составляющих мощностей потерь может быть выполнен по следующим формулам. Мощность механических потерь
Рмех ≈ 0,005 Pн = 4000 Вт, (7)
где Рн = 780 кВт – номинальная мощность ТМГ.
Мощность потерь в фазных обмотках синхронной ЭМ
 , (8)
, (8)
где m = 9 – число фаз обмотки ЭМ ТМГ.
Мощность потерь в диодах выпрямителя
![]() , (9)
, (9)
где Uf – пороговое падение напряжения на диоде в прямом направлении;
Ron– дифференциальное сопротивление диода во включенном состоянии.
Мощность магнитных потерь в магнитной системе синхронной ЭМ [7]
 , (10)
, (10)
где Pмаг.280 = 7,57·кВт – мощность суммарных магнитных потерь в синхронной ЭМ при номинальной частоте вращения nн = 2100 мин-1; fн = 280 Гц – частота перемагничивания магнитной системы синхронной ЭМ при номинальной частоте вращения nн = 2100 мин-1;
f – частота перемагничивания магнитной системы синхронной ЭМ.
Мощность, отдаваемая ТМГ в нагрузку, вычисляется по формуле
![]() . (11)
. (11)
Мощность, отбираемая ТМГ от дизельного двигателя, равна сумме мощности его нагрузки и мощностей потерь
![]() . (12)
. (12)
Для определения КПД ТМГ используется выражение
 . (13)
. (13)
Момент сопротивления, прикладываемый к валу дизельного двигателя при вращении ротора ТМГ, может быть получен из выражения
 , (14)
, (14)
где ωr= n·π/30 - угловая частота вращения ротора синхронной машины ТМГ.
2. Имитационная модель ТМГ и стенда для его испытания
Имитационная модель ТМГ на основе синхронной ЭМ с постоянными магнитами в составе испытательного стенда реализована в математическом пакете MATLAB с использованием приложений SIMPOWERSYSTEMS и SIMULINK [12,13]. Структурная схема модели показана на рисунке 3. Она состоит из модели синхронной ЭМ ТМГ, модели его выпрямителя, блоков определения мощностей потерь, блоков определения мощностей и КПД ТМГ, блока определения момента сопротивления, вспомогательных блоков и регистрирующих устройств.
Модель синхронной ЭМ ТМГ состоит из девяти одинаковых групп функциональных блоков, каждая из которых моделирует одну из фазных обмоток. В модели фазных обмоток (рисунок 3) входят эквиваленты их активных сопротивлений Rs0 … Rs8, эквиваленты их индуктивностей Ls0 … Ls8, маскированные субсистемы Е0 … Е8, моделирующие ЭДС вращения, и блоки m0 … m8, задающие значения начальных фаз ЭДС вращения фазных обмоток.
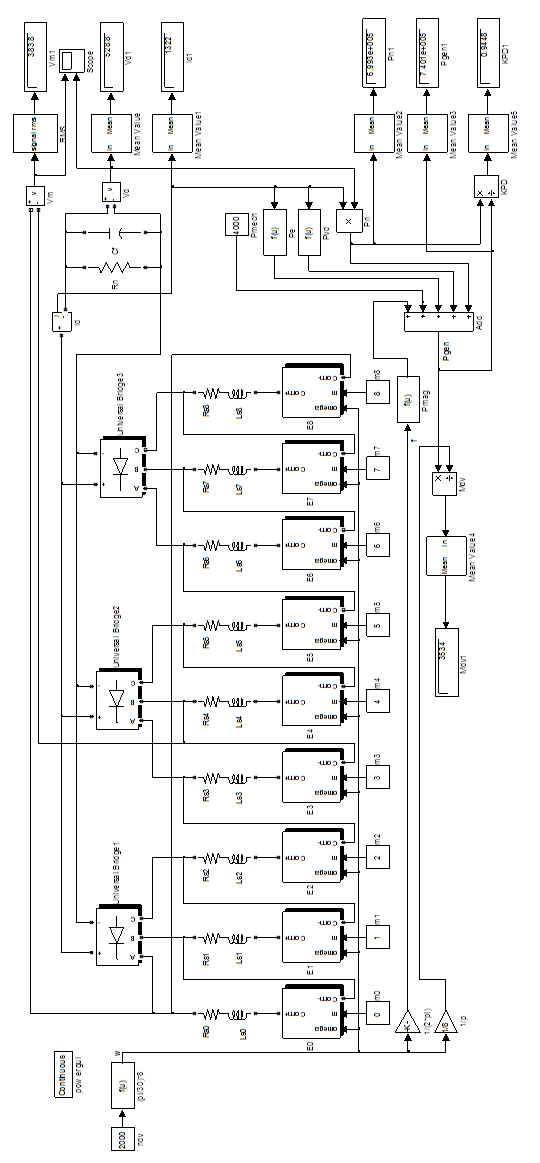
Рисунок 3 – Имитационная модель ТМГ в составе испытательного стенда
Структурная схема модели ЭДС вращения фазных обмоток, образующих субсистемы Е0 … Е8, приведена на рисунке 4. Она моделирует выражение (1) и содержит два входных порта. Порт omega служит для подачи угловой частоты ω ЭДС вращения фазной обмотки, а порт m для задания значения ее начальной фазы mψ. Блоки клемм Conn+, Conn- предназначены для подключения к модели ЭДС вращения фазной обмотки моделей внешних электротехнических элементов.
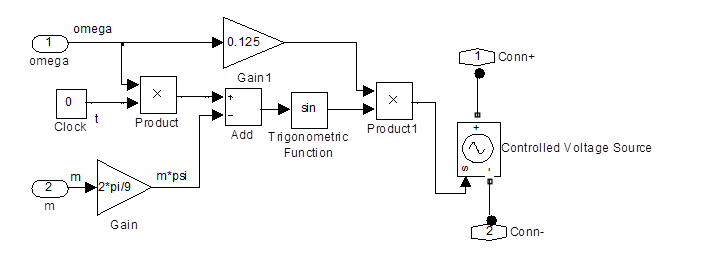
Рисунок 4 – Структурная схема модели ЭДС вращения фазной обмотки синхронной ЭМ
Модель девятифазного мостового выпрямителя (рисунок 3) состоит из трех блоков универсальных мостов UniversalBridge 1, UniversalBridge 2, UniversalBridge 3, выполненных на силовых диодах. Входы универсальных мостов присоединены к выводам модели обмотки синхронной машины, а их выходы одинаковой полярности объединены и являются выходными выводами ВС. К ним подключают нагрузку ТМГ. Блоки UniversalBridge 1, UniversalBridge 2, UniversalBridge 3 представляют собой маскированные субсистемы. При моделировании ТМГ параметры диодов в этих блоках приняты Uf = 1 В, Ron = 0,001 Ом.
Блоки мощностей потерь Pmech, Pe, Pvd, Pmag в имитационной тодели ТМГ реализуют выражения (7) – (10), а блоки Pn, Add, KPD, Mdv выражения (11) – (14).
Испытательный стенд ТМГ образуют блок ndv, задающий частоту вращения ЭМ n, резистор Rn, конденсатор Cf и регистрирующие устройства. Резистор Rnявляется нагрузкой ТМГ. Его значение можно изменять от 0,001 Ом до 100 Ом. Нижний предел Rn соответствует короткому замыканию, а верхний предел холостому ходу ТМГ. Конденсатор Cf демпфирует перенапряжения на нагрузке ТМГ, вызванные коммутационными процессами в ВС ТМГ.
Регистрирующие устройства предназначены для визуализации данных, полученных при моделировании режимов работы ТМГ. Измерители напряжения Vm, Vd и тока Id измеряют мгновенные значения, соответственно, линейного напряжения e15(t) обмотки синхронной ЭМ, выходного напряжения ud(t) и тока нагрузки id(t) ВС ТМГ. Осциллограф Scope используется для наблюдения изменений линейного напряжения e15(t) обмотки синхронной ЭМ и выходного напряжения ud(t) ВС ТМГ в процессе моделирования. Блок RMSопределяет действующее значение линейного напряжения E15 обмотки синхронной ЭМ ТМГ. Его частота равна f = 8n/60. Блоки MeanValue, MeanValue 1, MeanValue 2, MeanValue 3, MeanValue 4, MeanValue 5 определяют средние значения, соответственно, выходного напряжения ВС ТМГ Ud, тока его нагрузки Id, мощности нагрузки ТМГ Pн, мощности Pген, отбираемой ТМГ от ДВС, момента сопротивления ТМГ Мс и КПД ТМГ ηген за интервал времени 0,01 с. Цифровые дисплеи Vm1, Vd1, Id1, Pn1, Pgen1, Mdv1, KPD1 показывают числовые значения, соответственно, действующего значения линейного напряжения E15 обмотки синхронной ЭМ ТМГ, выходного напряжения ВС ТМГ Ud, тока его нагрузки Id, мощности нагрузки ТМГ Pн, мощности Pген, отбираемой ТМГ от ДВС, момента сопротивления ТМГ Мс и КПД ТМГ ηген.
Для удобства исследования по имитационным моделям статических и динамических режимов работы системы дизельный ДВС – ТМГ на основе синхронной ЭМ с постоянными магнитами имитационная модель ТМГ (рисунок 3) оформлена в виде субсистемы Generator. Ее структурная схема изображена на рисунке 5. Она представляет собой модель ТМГ без регистрирующих устройств и содержит имеет идентичные по обозначению и назначению с моделью ТМГ на рисунке 3 входной порт ndv, выходные порты Mdv, Vd, Id и блоки клемм Ud+, Ud-.
На основе субсистемы Generator разработана модель для исследования переходных характеристик ТМГ при скачкообразном изменении его нагрузки. Она приведена на рисунке 6. Подключение и отключение резистора нагрузки Rf к ТМГ в этой модели осуществляется ключом IdealSwitch, управляемого генератором прямоугольных импульсов PulseGenerator.
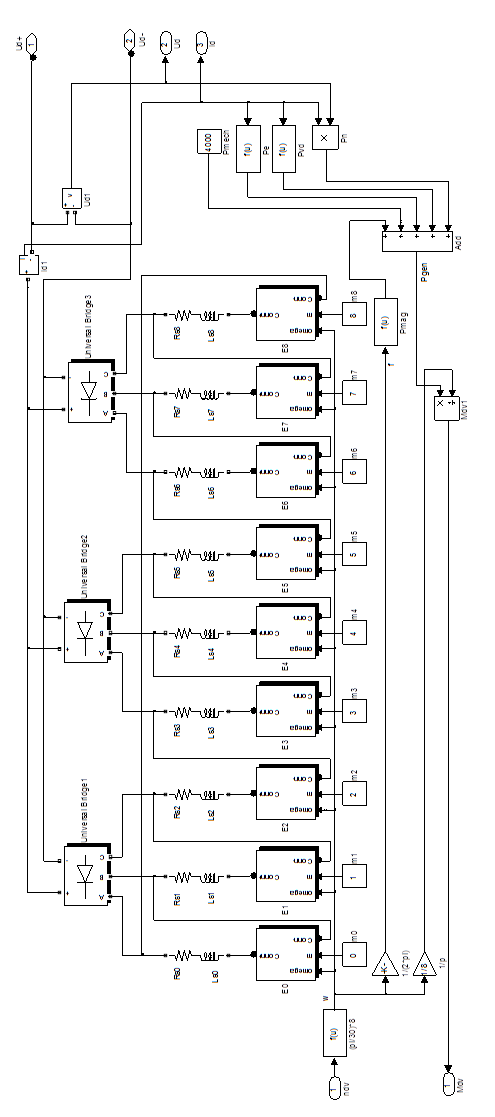
Рисунок 5 – Структурная схема субсистемы Genrerato

Рисунок 6 – Модель для исследования переходных характеристик ТМГ
3. Результаты моделирования основных режимов работы ТМГ на основе синхронной ЭМ с постоянными магнитами
Одним из основных режимов работы синхронного генератора с постоянными магнитами ТМГ является статический режим, при котором дизельным двигателем обеспечивается постоянство частоты вращения ротора генератора n = const. Получаемые в этом режиме работы статические характеристики ТМГ Ud, Pн, Pген, ηген, Mс = f(Id) позволяют оценить его нагрузочную способность и эффективность преобразования им механической энергии, получаемой от ДВС.
Снятие статических характеристик осуществлялось на модели ТМГ в составе испытательного стенда (рисунок 3). Полученные результаты при частоте вращения ТМГ
n = 2000 мин-1 приведены в таблице.
Таблица – Статические характеристики ТМГ при n = 2000 мин-1
Id, А | Ud, В | Pн, Вт | Pген, Вт | ηген | Mс, Н·м |
12 | 597 | 7 | 18 | 0,391 | 87 |
217 | 587 | 128 | 140 | 0,912 | 668 |
520 | 573 | 298 | 314 | 0,948 | 1500 |
747 | 560 | 420 | 440 | 0,952 | 2099 |
1026 | 543 | 559 | 587 | 0,951 | 2809 |
1237 | 532 | 659 | 695 | 0,948 | 3317 |
1561 | 515 | 805 | 855 | 0,941 | 4081 |
Графические изображения статических характеристик ТМГ показаны на рисунке 7, а внешних характеристик Ud = f(Id) на рисунке 8. Влияние тока нагрузки ТМГ Id на вид временных зависимостей линейного напряжения e15(t) обмотки синхронной ЭМ и пульсации выходного напряжения ВС ud(t) отражено на осциллограммах, приведенных на рисунках 9, 10. На рисунке 11 изображены полученные при испытании ТМГ его экспериментальные статические характеристики, а на рисунках 12 и 13 экспериментальные осциллограммы пульсаций выходного напряжения ВС ud(t) при работе ТМГ в режиме холостого хода и с нагрузкой. Динамические свойства ТМГ иллюстрируют переходные характеристики, показывающие изменение во времени выходного напряжения ud(t) и тока нагрузки id(t) его выпрямителя при скачкообразных изменениях сопротивления нагрузки при подключении и отключении ТЭД. Переходные характеристики ТМГ, полученные моделированием при n = 2000 мин-1 и скачкообразном подключении и отключении нагрузки Rn1 = 0,4 Ом, показаны на рисунке 14, а осциллограмма экспериментальной переходной характеристики при n = 2000 мин-1 на рисунке 15. Снятие экспериментальной переходной характеристики осуществлялось ступенчатым нагружением ТМГ с последующим полным отключением нагрузки. До нагружения ТМГ его выходное напряжение было Ud = 735 В. При нагружении на первой ступени получены Ud = 708 В, Id = 172 А, на второй ступени -Ud = 696 В, Id = 286 А, на третьей ступени -Ud = 680 В, Id = 450 А, а после отключения нагрузки -Ud = 725 В.

Рисунок 7 – Статические характеристики девятифазного ТМГ на основе синхронной ЭМ с постоянными магнитами при n = 2000 мин-1

Рисунок 8 – Внешние характеристики девятифазного ТМГ на основе синхронной ЭМ с постоянными магнитами
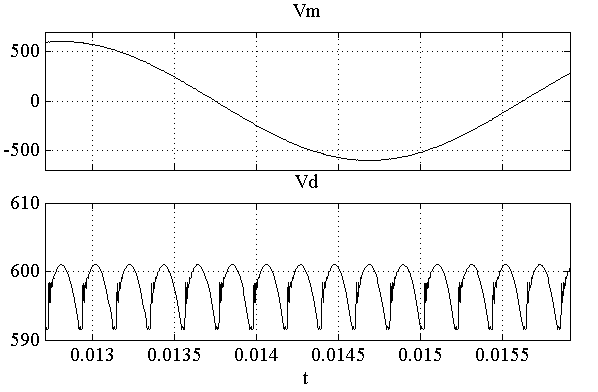
Рисунок 9 – Осциллограммы линейного напряжения e15(t) и пульсаций напряжения ud(t) при n = 2000 мин-1 и Id = 6 А

Рисунок 10 –– Осциллограммы линейного напряжения e15(t) и пульсаций напряжения ud(t) при n = 2000 мин-1 и Id = 1300 А

Рисунок 11 – Экспериментальные статические характеристики ТМГ при n = 2000 мин-1
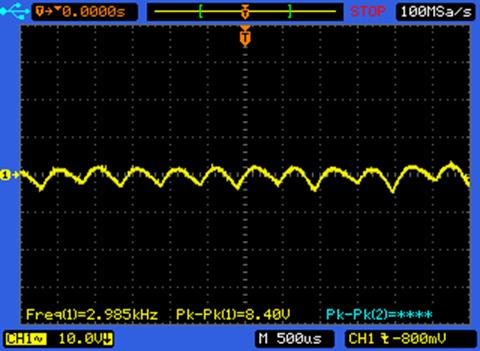
Рисунок 12 – Экспериментальные осциллограммы пульсаций напряжения ud(t) в режиме холостого хода ТМГ при n = 1500 мин-1

Рисунок 13 – Экспериментальные осциллограммы пульсаций напряжения ud(t) при n = 1500 мин-1 и Id = 172 А

Рисунок 14 – Переходные характеристики ТМГ при подключении и отключении нагрузки Rn1 = 0,4 Ом

Рисунок 15 – Экспериментальная переходная характеристика ТМГ при ступенчатом нагружении и отключении нагрузки
4. Обобщенная имитационная модель ТМГ
Имитационная модель ТМГ на основе синхронной ЭМ с постоянными магнитами, приведенная на рисунке 5, достаточно полно отражает происходящие в нем физические процессы и учитывает их влияние на его статические и динамические характеристики. В ее состав входят модели трех трехфазных мостовых выпрямителей, представляющих собой нелинейные блоки. Модели его фазных обмоток состоят из блоков, осуществляющих физическую реализацию дифференциальных уравнений первого порядка со сравнительно малой постоянной времени. Поэтому для устойчивой работы модели ТМГ и обеспечения необходимой точности отражения происходящих в нем коммутационных процессов выбран достаточно малый шаг времени расчета Δt = 1·10-4 с.
При использовании данной модели ТМГ совместно с моделью ДВС для исследования его статических и динамических характеристик при изменении нагрузки ТМГ их расчет занимает значительное время, что существенно снижает эффективность моделирования. Применение известных способов повышения скорости расчета моделей, созданных на основе приложений математического пакета MATLAB [12, 13], не позволяет получить необходимое быстродействие модели ТМГ. Достигнуть необходимого быстродействия моделирования ТМГ позволяет замена его детализированной модели, изображенной на рисунке 5, обобщенной моделью. Обобщенная модель ТМГ представляет его упрощенную модель, в которой модели фазных обмоток и трехфазных мостовых выпрямителей заменены совокупностью блоков, реализующих внешнюю характеристику ТМГ в соответствии с выражением (5).
Созданная обобщенная имитационная модель ТМГ оформлена в виде субсистемы Generator 1. Ее структурная схема показана на рисунке 16. Субсистема Generator 1 имеет такое же обозначение портов и блоков клемм, как и у субсистемы Generator детализированной модели ТМГ (рисунок 5). Поэтому методики исследование статических и динамических характеристик ТМГ по обеим моделям одинаковы, однако получаемые результаты могут отличаться. Это видно на примере показанных на рисунке 17 переходных характеристик ТМГ, полученных с помощью его обобщенной модели.

Рисунок 16 - Структурная схема субсистемы Generator 1
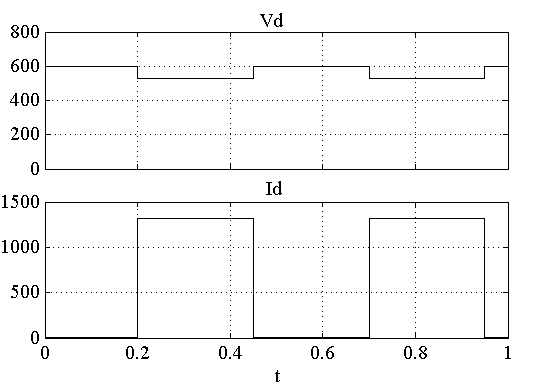
Рисунок 17 -Переходные характеристики ТМГ при n = 2000 мин-1, полученные на обобщенной модели
5 . Анализ результатов моделирования ТМГ
Результаты имитационного регулирования и экспериментальных исследований ТМГ на основе синхронной ЭМ с постоянными магнитами и девятифазной замкнутой обмоткой убедительно свидетельствуют о влиянии на его статические и динамические характеристики коммутационных процессов, происходящих в ВС. Из осциллограмм на рисунках 9,10 видно, что при нагружении ТМГ они приводят к возникновению ступенчатых провалов в линейном напряжении синхронной ЭМ, а также к увеличению амплитуды пульсаций выходного напряжения ТМГ. Эту зависимость амплитуды пульсаций выходного напряжения ТМГ от тока его нагрузки подтверждают снятые при испытании ТМГ осциллограммы, представленные на рисунках 12, 13.
Внешние характеристики ТМГ (рисунок 7) имеют значительный наклон, определяемый в соответствии с (5) внутренними падениями напряжения. Количественная оценка падения выходного напряжения ТМГ может быть выполнена двумя способами. Из приведенных в таблице результатов моделирования ТМГ в составе испытательного стенда следует, что при n = 2000 мин-1 и токе Id = 1237 А падение выходного напряжения ТМГ составляет
![]() .
.
При том же токе нагрузке ТМГ, учитывая, что Хк ≈ 0,055 Ом при n = 2000 мин-1, из (6) получим
 .
.
Сопоставляя полученные результата в обоих вариантах расчета можно сделать вывод, что коммутационная составляющая является основной в падении выходного напряжения ТМГ и вызывает его снижение при номинальном токе нагрузки почти на 11 %. Практически такое же падение выходного напряжения ТМГ (около 14 %) получено при экспериментальном снятии его выходной характеристики (рисунок 11).
Из анализа статических характеристик ТМГ (рисунок 7) установлено, что момент нагрузки ДВС Мс прямо пропорционален току нагрузки ТМГ Id, т.е. току, потребляемому всеми ТЭД транспортного средства. При использовании в качестве ТЭД бесконтактных двигателей постоянного тока (БДПТ) [5, 7, 12], электромагнитный момент которых прямо пропорционален потребляемому ими току, момент нагрузки ДВС будет прямо пропорционален суммарному электромагнитному моменту всех БДПТ, подключенных к ТМГ. Понижение выходного напряжения ТМГ при его нагружении не влияет на развиваемый БДПТ электромагнитный момент, но приводит к уменьшению верхней границы регулирования их частоты вращения. Для компенсации снижения выходного напряжения ТМГ и повышения верхней границы регулирования частоты вращения БДПТ при неизменном моменте нагрузки необходимо увеличивать частоту вращения ДВС.
Переходные характеристики ТМГ (рисунок 14) показывают изменение его выходного напряжения при скачкообразных изменениях тока нагрузки. Такие режимы работы ТМГ возникают при подключении к нему ТЭД перед началом движения транспортного средства и отключении ТЭД при окончании движения, а также при осуществлении динамического торможения ТЭД, являющимся в настоящее время основным способом торможения электродвигателей колес транспортных средств. Подключение нагрузки к ТМГ, как следует из рисунка 14, вызывает кратковременный провал его выходного напряжения, который может привести к сбою функционирования ПС ТЭД и создать аварийную ситуацию. При отключении нагрузки от ТМГ на его выходе возникает значительное перенапряжение, которое может стать причиной возникновения электрической дуги между контактами контакторов, отключающих нагрузку, и их повреждение.
Наличие провалов и выбросов выходного напряжения ТМГ показывает и его экспериментальная переходная характеристика на рисунке 15, снятая при ступенчатом нагружении и отключении нагрузки. Для снижения степени проявления отмеченных негативных явлений, обусловленных влиянием индуктивности обмотки синхронной ЭМ ТЭД, целесообразно предусмотреть в системах управления ПС ТЭД задание плавного изменения потребляемого ими тока при пуске и отключении.
Сопоставление результатов моделирования статических характеристик ТМГ при n = 2000 мин-1 по его обобщенной модели, представленной субсистемой Generator 1 (рисунок 16), показало практическое совпадение их с приведенными в таблице данными моделирования этих же характеристик по детализированной модели ТМГ Generator (рисунок 5).
Анализ и сравнение переходных характеристик ТМГ, полученных на его обобщенной модели (рисунок 17), с подобными характеристиками на рисунке 14, снятыми на детализированной модели ТМГ, показывают, что по изменениям средних значений выходного напряжения ТМГ Ud и тока его нагрузки Id они совпадают. Поскольку изменение именно этих параметров ТМГ в основном влияет на момент сопротивления Мс, прикладываемый к валу ДВС, то, учитывая его инерционность по сравнению с инерционностью электрических цепей ТМГ, обобщенная модель ТМГ может быть использована совместно с моделью ДВС для исследования не только его статических, но и динамических характеристик. Главное же состоит в том, что в обобщенной модели без ущерба для точности шаг времени расчета сокращен на порядок, а общее время расчета при одинаковой длительности процесса моделирования сократилось на 3-4 порядка.
Заключение
Разработанная детализированная имитационная модель тягового генератора на основе девятифазной электрической машины с постоянными магнитами и замкнутой обмоткой и неуправляемого двухполупериодного мостового выпрямителя учитывает влияние происходящих в нем коммутационных процессов на его статические и динамические характеристики и в составе модели испытательного стенда может использоваться для уточнения и коррекции поверочных расчетов тягового генератора рассматриваемого типа.
Результаты моделирования и экспериментального исследования статических и динамических характеристик тягового генератора показывают, что коммутационные процессы в его выпрямителе при увеличении тока нагрузки приводят к возрастанию пульсаций и значительному (более 10 %) снижению выходного напряжения, а также мощности тягового генератора.
Установлено, что момент нагрузки двигателя внутреннего сгорания, вращающего тяговый генератор на основе синхронной машины с постоянными магнитами, прямо пропорционален току, потребляемому всеми тяговыми электродвигателями транспортного средства, и не зависит от их частоты вращения.
Моделирование и экспериментальное исследование переходных характеристик тягового генератора при подключении и отключении нагрузки показало наличие кратковременных провалов и, соответственно, выбросов его выходного напряжения, способных нарушить функционирование силовых преобразователей тяговых электродвигателей. Уменьшение отмеченных динамических отклонений выходного напряжения тягового генератора может быть получено заданием плавного изменения потребляемого тока тяговыми электродвигателями при их пуске и отключении.
Предложенная обобщенная имитационная модель тягового генератора отражает изменение статической составляющей его выходного напряжения с учетом происходящих в выпрямителе коммутационных процессов, обладает повышенной скоростью моделирования и может быть рекомендована для совместного использования с моделью двигателя внутреннего сгорания для исследования его статических и динамических характеристик.
Список литературы
1. Флоренцев С. Комплект тягового электрооборудования большегрузных карьерных самосвалов // Электронные компоненты. 2006. № 11. С. 23-29.
2. Дюбей Гопал К. Основные принципы устройства электроприводов : пер. с англ. М.: Техносфера, 2009. 480 с.
3. Флоренцев С., Изосимов Д. Тяговый электропривод в гибридных транспортных средствах. Часть 1. Идеология проектирования КТЭО // Электронные компоненты. 2009. № 11. С. 13-18.
4. Виноградов А., Изосимов Д., Флоренцев С., Коротков А. Станция автономного электроснабжения // Электронные компоненты. 2010. № 11. С. 23-29.
5. Бут Д.А. Бесконтактные электрические машины. М.: Высшая школа,1985. 255 с.
6. Кузьмичев Р.В. Генератор в системе электроснабжения перспективного самолета с повышенным уровнем электрификации: автореф. дис. … канд. техн. наук. М., 2012. 24 с.
7. Соловьев В.А. Непрерывное токовое управление вентильными двигателями. М.: МГТУ им. А.Н. Косыгина, 2004. 264 с.
8. Пиотровский Л.М. Электрические машины. Л.: Энергия, 1972. 504 с.
9. Розанов Ю.К. Основы силовой электроники. М.: Энергоатомиздат, 1992. 236 с.
10. Забродин Ю.С. Промышленная электроника. М.: Высшая школа, 2008. 496 с.
11. Захаренко А.Б. Исследование теплового режима ветрогенератора // Электричество. 2006. № 4. С. 61-64.
12. Герман-Галкин С.Г. Matlab & Simulink. Проектирование мехатронных систем на ПК. СПб: КОРОНА-Век, 2008. 368 с.
13. Черных И.В. Моделирование электротехнических устройств в MATLAB, SimPowerSystems и Simulink. М.: ДМК Пресс, 2008. 288 с.
Публикации с ключевыми словами: имитационная модель, тяговый генератор, синхронная электрическая машина с постоянными магнитами, силовой многофазный выпрямитель
Публикации со словами: имитационная модель, тяговый генератор, синхронная электрическая машина с постоянными магнитами, силовой многофазный выпрямитель
Смотри также:
- 77-30569/234292 Разработка в MATLAB-Simulink модели визуализации в виртуальной реальности управляемого пространственного движения подводного аппарата
- Оценка параметров системы мониторинга рабочих станций в локальной вычислительной сети.
- 77-30569/256412 Имитационные модели гидропрессования конического соединения с гарантированным натягом
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||