научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 02, февраль 2013
DOI: 10.7463/0213.0541387
УДК. 621.01
Россия, Волгоградский государственный технический университет
Vad.Chernyshev@mail.ru
Введение
При движении транспортных средств по грунтам с низкой несущей способностью необходимы значительные энергозатраты на преодоление грунтового сопротивления движению. У шагающих машин снижение потерь мощности на прессование грунта может быть достигнуто за счет увеличение длины шага, так как в этом случае будет иметь место меньшее число деформаций грунта на единицу пути [1]. С другой стороны шагающий способ передвижения требует дополнительных энергозатрат на преодоление цикловых сил инерции в системе и на вертикальные колебания корпуса при каждом шаге. В работе исследовано влияние длины шага на энергоэффективность маршевых режимов движения (с периодическим движением ног) шагающих машин «тяжелой» весовой категории.
Анализ базируется на результатах теоретических исследований и полевых испытаний 5-ти тонных шагающих робототехнических комплексов «Восьминог» и «Восьминог-М» (рисунок 1), предназначенных для работы на слабонесущих грунтах [2, 3], а также опытных образцов шагающих опор (рисунок 2) многосекционной дождевальной машины «Кубань» [4, 5].Существование реальных образцов шагающих машин с известными кинематическими и инерционными характеристиками движителя существенно облегчили проведение анализа. Машины основываются на простейших шагающих движителях с одной управляемой степенью свободы. Движитель состоит из двух механизмов шагания циклового типа, кинематически жёстко связанных и работающих в противофазе. В каждый момент времени хотя бы один из механизмов шагания находится в контакте с грунтом, таким образом, коэффициент режима такого движителя равен 1. Использование цикловых движителей позволяет не заботиться о сохранении походки и устойчивости и исключает необходимость управляемой системы адаптации. В результате машины имеют минимальное число управляемых степеней свободы и становятся существенно проще и на порядок дешевле аналогов с адаптивным управлением [6, 7]. Исключительно высокая грунтовая и профильная проходимость [6–10], простота конструкции, надежность работы и низкая стоимость делают возможным создание и широкую эксплуатацию таких шагающих машин уже в настоящее время.

Рисунок 1 — Шагающий робототехнический комплекс «Восьминог-М»

Рисунок 2 — Опытный образец шагающей опоры дождевальной машины
У шагающего робота «Восьминог» за счет увеличения длины шага прорабатывалась возможность снижения его инерционной нагруженности при повышении скорости движения до 5–7 км/ч.В этом случае снижение сил инерции происходит за счет уменьшения скорости вращения кривошипов механизмов шагания, так как при увеличении длины шага для обеспечения заданной курсовой скорости движения необходима меньшая угловая скорость ведущего звена.
В шагающей опоре дождевальной машины возможность увеличения длины шага прорабатывалась с целью повышения экологичности движителя. Традиционные транспортные средства в поливном земледелии не обладают достаточной проходимостью, оставляют глубокую колею и разрушают почвенный покров [4, 11]. Так, например, при движении колесных дождевальных машин образуется широкая колея, (глубиной порядка 0,5 м) хорошо заметная из космоса (рисунок 3). Колея такого размера уменьшает коэффициент полезного использования почвы, а также приводит к бесполезным потерям воды, которая либо скапливается в колее, либо уходит с поля по этим своеобразным каналам, разрушая и смывая плодородный слой почвы. Водная эрозия почвы, вызванная указанными причинами хорошо заметна на участках А и В (рисунок 4).

Рисунок 4 — Образование колеи при движении многосекционной дождевальной машины «Кубань» кругового действия с колесным движителем:
1 — колея опорных тележек; 2 — секции дождевальной машины

Рисунок 5 — Пример ирригационной эрозии почвы (участки A и B)
По показателям экологичности шагающий движитель в поливном земледелии существенно превосводит колесный — глубина следовой дорожки при испытаниях [11] составляла всего 5–20 % от глубины колеи колесных движителей (рисунок 5). Однако, из-за того, что в опытных образцах шагающих опор длина шага была меньше длины лыжи, то следовая дорожка получилась не дискретной, а сплошной, как и у колесного движителя, что способствует ирригационной эрозии почвы.
а) |
б) |
Рисунок 5 — Колея колесного (а) и шагающего (б) движителя дождевальной машины | |


В шагающей опоре длина ног выбиралась из условия возможности ее работы в многоопорной дождевальной машине «Кубань» совместно с серийными колесными опорами. Длина шага получилась сравнительно небольшой (около 0,8 м). Габариты опоры позволяют, не меняя принципиальную схему движителя, увеличить длину шага в 2–3 раза путем соответствующего увеличения длин звеньев базового механизма шагания.
Методика определения энергозатрат
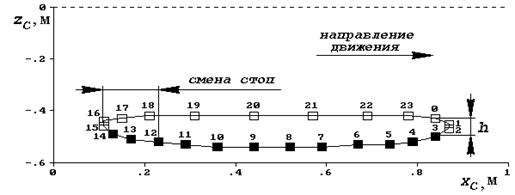
В машинах использовались движители на базе одностепенных 4-х звенных цикловых механизмов шагания с пассивно управляемой стопой [12, 13]. Механизм шагания «λ-образного» типа предложен Н.В. Умновым (МГТУ им. Н.Э. Баумана, ИМАШ РАН им. А.А. Благонравова,). Схема механизма шагания и траектория его опорной точки Cв относительном движении представлены на рисунке 6. На рисунках 6 б и 6 в точки на траектории расположены через равные промежутки времени — через ![]() периода цикла. Точки с заливкой соответствуют опорной фазе в случае недеформируемого грунта. Если деформация грунта имеет место, то появляется дополнительная фаза цикла — фаза смены стоп. Так, например, при глубине следовой дорожки h = 0,05 м смена стоп в базовом движителе будет происходить на участках 0–3 и 12–15 траектории (рисунок 6 б). В движителе с увеличенной длиной шага в два раза, по сравнению с базовым, смена стоп, при той же глубине следовой дорожки, будет происходить на участках 2–3 и 14–15 траектории (рисунок 6 в) и занимает меньшую часть цикла, чем в первом случае.
периода цикла. Точки с заливкой соответствуют опорной фазе в случае недеформируемого грунта. Если деформация грунта имеет место, то появляется дополнительная фаза цикла — фаза смены стоп. Так, например, при глубине следовой дорожки h = 0,05 м смена стоп в базовом движителе будет происходить на участках 0–3 и 12–15 траектории (рисунок 6 б). В движителе с увеличенной длиной шага в два раза, по сравнению с базовым, смена стоп, при той же глубине следовой дорожки, будет происходить на участках 2–3 и 14–15 траектории (рисунок 6 в) и занимает меньшую часть цикла, чем в первом случае.
а)
| б)
|
в)
| |
Рисунок 6 — Схема механизма шагания (а) и траектория его опорной точки в относительном движении в базовом движителе (б) и в движителе с увеличенной в два раза, по сравнению с базовым, длиной шага (в): | |


Потребную мощность на движение шагающей машины можно представить в виде суммы затрат мощности на преодоление грунтового сопротивления движению и дополнительных энергозатрат, обусловленных шагающим способом передвижения [14].
При анализе структуры эноргозатрат при движении потери мощности на преодоление грунтового сопротивления оценивались как
![]() , (1)
, (1)
где vx — курсовая скорость; kf — коэффициент сопротивления движению; G — вес шагающей машины. Для шагающего движителя ориентировочные значения kf, в условиях отсутствия экспериментальных данных, определялись аналитически по формуле ![]() , где Af — работа, затрачиваемая на прессование грунта за цикл; S — перемещение машины за цикл. В нашем случае прессование грунта за цикл (2 шага) происходит дважды, поэтому
, где Af — работа, затрачиваемая на прессование грунта за цикл; S — перемещение машины за цикл. В нашем случае прессование грунта за цикл (2 шага) происходит дважды, поэтому ![]() .
.
Дополнительные энергозатраты, расходуемые на возникающие при ходьбе колебания в системе, включают в себя мощность на преодоление сил тяжести
![]() , (2)
, (2)
мощность, расходуемую на преодоление цикловых сил инерции корпуса
![]() , (3)
, (3)
и мощность на преодоление сил инерции в движителе, которые складываются из затрат на преодоление сил инерции в звеньях механизмов шагания
 , (4)
, (4)
где vz — вертикальная скорость машины; ![]() — курсовая и вертикальная составляющие главного вектора сил инерции корпуса; ax, az — его курсовое и вертикальное ускорение; m0 — масса корпуса;
— курсовая и вертикальная составляющие главного вектора сил инерции корпуса; ax, az — его курсовое и вертикальное ускорение; m0 — масса корпуса; ![]() ,
, ![]() и
и ![]() — курсовая и вертикальная силы инерции i-го звена j-го механизма шагания k-го борта (K = 1 для шагающей опоры, K = 2 для шагающего робота) и момент сил инерции звена в плоскости шагания, соответственно;
— курсовая и вертикальная силы инерции i-го звена j-го механизма шагания k-го борта (K = 1 для шагающей опоры, K = 2 для шагающего робота) и момент сил инерции звена в плоскости шагания, соответственно; ![]() ,
, ![]() и
и ![]() — координаты центров масс звеньев в абсолютном движении и их угол поворота в плоскости шагания; miи
— координаты центров масс звеньев в абсолютном движении и их угол поворота в плоскости шагания; miи ![]() — масса и центральный момент инерции i-го звена механизма шагания.
— масса и центральный момент инерции i-го звена механизма шагания.
При значительных силах инерции мощность на их преодоление реализуется не всегда — возможен срыв грунта, при больших горизонтальных силах инерции, или переход к бегу при больших вертикальных их составляющих. Для определения реально реализуемых мощностей на преодоление цикловых инерционных нагрузок вычислялись курсовая и вертикальная составляющие главного вектора сил инерции машины. Они определялись путем суммирования соответствующих проекций главного вектора сил инерции машины (без учета движителей) и сил инерции звеньев механизмов шагания.
Для определения сил инерции звеньев механизмов шагания определялись абсолютные ускорения их центров масс — точек Cijk. Они являются функциями угловых скоростей и ускорений звеньев механизмов шагания. Для определения инерционных нагрузок в движителе был проведен полный кинематический анализ машины. При определении скоростей и ускорений узловых точек механизмов шагания они рассматривались как плоские многозвенные механизмы. При составлении дифференциальных уравнений движения звеньев их угловые скорости выражались через скорости точек, на которые накладываются внешние связи. Выражения для скоростей узловых точек получались последовательным, от звена к звену, рассмотрением движений твердых тел. Угловые ускорения звеньев движителя определялись дифференцированием их угловых скоростей. Для задания движения корпуса к уравнениям движения звеньев также добавлялись формулы для проекций относительных скоростей опорных точек являющихся узловыми точками опорного звена, а также формулы для координат опорных точек, необходимые для определения момента смены стоп.
Результаты математического моделирования
Анализ результатов расчетов для шагающей опоры показал, что в диапазоне малых скоростей (до 1 км/ч), характерных для дождевальных машин, основной объем дополнительных энергозатрат связан с мощностью (2), идущей на преодоление сил тяжести шагающей опоры и напорного трубопровода при их вертикальных колебаниях в каждом цикле движения. Мощности на преодоление сил инерции корпуса (3) и в движителе (4) при малых скоростях несущественны, из-за малости ускорений.
Характер изменения мощности ![]() за цикл (2 шага) для шагающей опоры с базовым движителем с одной секцией напорного трубопровода (общей массой 2,5 тонны) при скорости 1 км/ч представлен кривой 1 на рисунке 7 а, где по оси абсцисс, для большей наглядности, расположены порядковые номера точек траектории приведенной на рисунке 6. Это позволяет определить участки соответствующие опорной фазе и фазе переноса, а также определить момент смены стоп. В данном случае среднее за цикл значение мощности, расходуемой на прессование грунта, составляет
за цикл (2 шага) для шагающей опоры с базовым движителем с одной секцией напорного трубопровода (общей массой 2,5 тонны) при скорости 1 км/ч представлен кривой 1 на рисунке 7 а, где по оси абсцисс, для большей наглядности, расположены порядковые номера точек траектории приведенной на рисунке 6. Это позволяет определить участки соответствующие опорной фазе и фазе переноса, а также определить момент смены стоп. В данном случае среднее за цикл значение мощности, расходуемой на прессование грунта, составляет ![]() .
.
В шагающих машинах, в отличие от колесных и гусеничных, энергозатраты на прессование грунта (1) имеют место лишь часть цикла — в момент смены стоп. Характер изменения Wf, если пренебречь влиянием скорости взаимодействия стопы с грунтом, определяется глубиной следовой дорожки и кривизной участка относительной траектории опорных точек, соответствующего фазе смены стоп. На рисунке 7 а кривой 2 представлен характер изменения Wf за циклдля шагающей опоры с базовым движителем при h = 0,05 м. При такой глубине следовой дорожки смена стоп будет происходить на участках 0–3 и 12–15 траектории (рисунок 6 б), где мощность Wf будет расти, по мере увеличения реакции грунта под стопой входящей в опорную фазу, от нуля до максимального значения ![]() . Это в несколько раз больше ее среднего значения за цикл
. Это в несколько раз больше ее среднего значения за цикл ![]() . Однако, при смене стоп мощности Wf и
. Однако, при смене стоп мощности Wf и ![]() (рисунок 7 а) имеют разные знаки и мощность на преодоление грунтового сопротивления на 65 % обеспечивается за счет рекуперации энергии, затраченной на подъем корпуса в предыдущем цикле. В результате Wf мало влияет на среднее значение мощности расходуемой на движение. Поскольку Wf и
(рисунок 7 а) имеют разные знаки и мощность на преодоление грунтового сопротивления на 65 % обеспечивается за счет рекуперации энергии, затраченной на подъем корпуса в предыдущем цикле. В результате Wf мало влияет на среднее значение мощности расходуемой на движение. Поскольку Wf и ![]() пропорциональны курсовой скорости, то такая же ситуация будет иметь место и при других скоростях движения.
пропорциональны курсовой скорости, то такая же ситуация будет иметь место и при других скоростях движения.


Рисунок 7 — Структура цикловых затрат мощности шагающей опоры многоопорной дождевальной машины«Кубань» при средней курсовой скорости 1 км/ч с базовым движителем (а) и с увеличенной в два раза длиной шага (б):![]() (кривая 1);
(кривая 1); ![]() (кривая 2)
(кривая 2)
При увеличении длины шага, при неизменной курсовой скорости движения, скорость вертикальных колебаний корпуса не изменяется и в соответствии с (2) зависимость мощности ![]() (рисунок 7 б, кривая 1) останется прежней. Среднее значение мощности, расходуемой на прессование грунта, при увеличении длины шага вдвое уменьшится до
(рисунок 7 б, кривая 1) останется прежней. Среднее значение мощности, расходуемой на прессование грунта, при увеличении длины шага вдвое уменьшится до ![]() , за счет уменьшения количества прессований грунта на единицу пути. С другой стороны здесь смена стоп будет происходить на участках 2–3 и 14–15 траектории (рисунок 6 в) и занимает меньше времени, чем в первом случае. Поскольку работа на прессование грунта за цикл не изменяется, то имеет место рост пика кривой 2 на рисунке 7 б до
, за счет уменьшения количества прессований грунта на единицу пути. С другой стороны здесь смена стоп будет происходить на участках 2–3 и 14–15 траектории (рисунок 6 в) и занимает меньше времени, чем в первом случае. Поскольку работа на прессование грунта за цикл не изменяется, то имеет место рост пика кривой 2 на рисунке 7 б до ![]() . В результате мощность на преодоление грунтового сопротивления обеспечивается за счет рекуперации энергии, затраченной на подъем корпуса лишь на 45%. С практической точки зрения важно не только среднее значения требуемой на движение мощности, определяющее энергоэффективность движения, но и ее максимальное значение
. В результате мощность на преодоление грунтового сопротивления обеспечивается за счет рекуперации энергии, затраченной на подъем корпуса лишь на 45%. С практической точки зрения важно не только среднее значения требуемой на движение мощности, определяющее энергоэффективность движения, но и ее максимальное значение ![]() , определяющее мощность привода. В рассматриваемом случае
, определяющее мощность привода. В рассматриваемом случае ![]() будет совпадать с максимумом кривой 2 и составит около 3 кВт, что больше чем в случае с базовым движителем.
будет совпадать с максимумом кривой 2 и составит около 3 кВт, что больше чем в случае с базовым движителем.
Таким образом, увеличение длины шага в диапазоне скоростей, где силы инерции в системе несущественны (порядка 1 км/ч), приводит к уменьшению средних энергозатрат на движение, однако при этом возможно увеличение их максимальных значений.
При увеличении скорости движения шагающей машины ситуация меняется. На рисунке 8 представлена структура цикловых энергозатрат робота «Восьминог-М» при скорости движения 5 км/ч. Указанная скорость близка к предельной реально реализуемой скорости для рассматриваемого мобильного робота. Рассмотрен случай синхронного движения бортов. Скольжением в асинхронном электроприводе пренебрегалось и вращение ведущих кривошипов механизмов шагания считалось равномерным.
При росте скорости движения, составляющие мощности (3) и (4), затрачиваемые при движении на преодоление сил инерции корпуса и сил инерции в движителе, соответственно, растут наиболее значительно, так как они пропорциональны кубу курсовой скорости. Именно эти составляющие ограничивают максимальную скорость шагающего способа передвижения. Потери на прессование грунта (1) и на преодоление силы тяжести при колебаниях корпуса (2), пропорциональные курсовой скорости, растут в меньшей степени. При скорости 5 км/ч основной вклад в энергозатраты на движение машины с базовым движителем (рисунок 8 а) вносит мощность ![]() , затрачиваемая на преодоление сил инерции корпуса. Несколько ей уступает мощность
, затрачиваемая на преодоление сил инерции корпуса. Несколько ей уступает мощность ![]() , расходуемая на преодоление силы тяжести при колебаниях корпуса машины. Мощность на преодоление сил инерции в движителе
, расходуемая на преодоление силы тяжести при колебаниях корпуса машины. Мощность на преодоление сил инерции в движителе ![]() , в рассматриваемом случае, вносят наименьший вклад в суммарную мощность. Мощность на преодоление грунтового сопротивления Wf полностью обеспечивается за счет рекуперации
, в рассматриваемом случае, вносят наименьший вклад в суммарную мощность. Мощность на преодоление грунтового сопротивления Wf полностью обеспечивается за счет рекуперации ![]() ,
, ![]() ,
, ![]() и она не влияет на среднее значение мощности расходуемой на движение. Положения максимальных значений основных составляющих дополнительных энергозатрат
и она не влияет на среднее значение мощности расходуемой на движение. Положения максимальных значений основных составляющих дополнительных энергозатрат ![]() и
и ![]() совпадают. В результате суммарные затраты мощности на передвижение меняются скачкообразно, что требует необоснованного увеличения мощности силовой установки.
совпадают. В результате суммарные затраты мощности на передвижение меняются скачкообразно, что требует необоснованного увеличения мощности силовой установки.
Структура цикловых затрат мощности на движение машины с увеличенной в два раза, по сравнению с базовым движителем, длиной звеньев механизмов шагания представлены на рисунке 8 б. При численном моделировании массы звеньев были увеличены из условия равнопрочности базового и нового механизма. Масса стопы, если оставлять неизменным давление на грунт, очевидно, не требует увеличения. Характер изменения скоростей и ускорений машины аналогичен соответствующим зависимостям для машины с базовыми движителями. Причем, значения vxи vzостаются неизменными, а ускорения axи az становятся в 2 раза ниже.

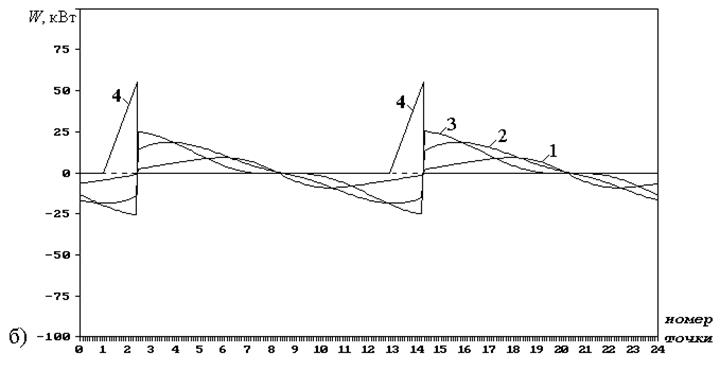
Рисунок 8 — Структура цикловых затрат мощности на колебания шагающей машины «Восьминог-М» при средней курсовой скорости 5 км/ч с базовым движителем (а) и с увеличенной в два раза длиной шага (б):![]() (кривая 1);
(кривая 1); ![]() (кривая 2);
(кривая 2); ![]() (кривая 3);
(кривая 3); ![]() (кривая 4)
(кривая 4)
Основной вклад в общие энергозатраты в данном случае вносит мощность ![]() , расходуемая на преодоление силы тяжести при колебаниях корпуса машины. Мощность
, расходуемая на преодоление силы тяжести при колебаниях корпуса машины. Мощность ![]() на преодоление сил инерции корпуса несколько ей уступает. Затраты мощности
на преодоление сил инерции корпуса несколько ей уступает. Затраты мощности ![]() остаются на уровне аналогичных затрат шагающей машины с базовыми движителями, мощность
остаются на уровне аналогичных затрат шагающей машины с базовыми движителями, мощность ![]() на преодоление сил инерции корпуса уменьшается вдвое. Затраты на преодоление сил инерции в движителе
на преодоление сил инерции корпуса уменьшается вдвое. Затраты на преодоление сил инерции в движителе ![]() вносят наименьший вклад. Мощность на преодоление грунтового сопротивления Wf практически полностью обеспечивается за счет рекуперации
вносят наименьший вклад. Мощность на преодоление грунтового сопротивления Wf практически полностью обеспечивается за счет рекуперации ![]() ,
, ![]() ,
, ![]() . Максимальные значения
. Максимальные значения ![]() ,
, ![]() и
и ![]() , как видно из рисунка 8 б, смещены по фазе. Это несколько сглаживает зависимость суммарной мощности за цикл и она носит более равномерный характер, чем в базовом механизме. В результате дополнительные затраты мощности, обусловленные шагающим способом передвижения, уменьшаются приблизительно на 30 % (рисунок 9).
, как видно из рисунка 8 б, смещены по фазе. Это несколько сглаживает зависимость суммарной мощности за цикл и она носит более равномерный характер, чем в базовом механизме. В результате дополнительные затраты мощности, обусловленные шагающим способом передвижения, уменьшаются приблизительно на 30 % (рисунок 9).

Рисунок 9 — Изменение за цикл дополнительной мощности шагающей машины «Восьминог-М» с базовым движителем (кривая 1) и с увеличенной в два раза длиной шага (кривая 2) при средней курсовой скорости 5 км/ч
Значения сил инерции в движителе в диапазоне скоростей 5–7 км/ч сравнительно невелики и они не влияют на динамику машины. Иная картина имеет место для корпуса шагающей машины. Значения проекций главного вектора сил инерции корпуса, во-первых, на порядок выше значения сил инерции в движителе, а во-вторых, горизонтальная составляющая сил инерции корпуса уже при скорости 5 км/ч достигает значений, близких к максимальной силе сцепления шагающей машины на хорошем грунте. В результате курсовая составляющая Φxглавного вектора сил инерции машины (рисунок 10 а) превосходит реально реализуемую для большинства грунтов силу сцепления. Это означает, что уже при скорости 5 км/ч, даже на грунтах с хорошими сцепными свойствами, будет иметь место срыв грунта и буксование стоп.
При увеличении длины шага значения главного вектора сил инерции машины (рисунок 10 б) уменьшаются. Курсовая составляющая Φxснижается почти в 2 раза. В результате, в отличие от базовой машины, Φxуже не превосходит реально реализуемую для большинства грунтов силу сцепления. Составляющая Φz незначительна и мало влияет на динамику машины.


Рисунок 10 — Курсовая (кривая 1) и вертикальная (кривая 2) составляющих главного вектора сил инерции шагающей машины «Восьминог-М» с базовым движителем (а) и с увеличенной в два раза длиной шага (б) при средней курсовой скорости 5 км/ч
Выводы
Таким образом, увеличение длины шага существенно уменьшает инерционную нагруженность и приводит к уменьшению средних энергозатрат на движение цикловых шагающих машин. Причем при скоростях выше 3–4 км/ч мощность на прессование грунта, независимо от длины шага, практически полностью обеспечивается за счет рекуперации энергии, затраченной в предыдущем цикле на преодоление сил инерции корпуса и сил инерции в движителе, а также на преодоление силы тяжести корпуса машины при вертикальных его колебаниях. В диапазоне малых скоростей (до 1–2 км/ч), где силы инерции в рассматриваемой механической системе несущественны, увеличение длины шага приводит к некоторому уменьшению среднего значения мощности, требуемой на движение, однако при этом возможно увеличение его максимального значения. Мощность на преодоление грунтового сопротивления в этом скоростном диапазоне обеспечивается за счет рекуперации лишь частично, за счет энергии затраченной в предыдущем цикле на подъем корпуса шагающей машины. Существенный недостаток увеличения длины шага — рост габаритов движителя, необходимый для увеличения размеров траектории опорной точки (ее длины и высоты), компенсируется повышением профильной проходимости машины, которое будет иметь место в этом случае.
Выводы, сформулированные для шагающих машин с цикловыми движителями, по-видимому, можно распространить и на шагающие машины адаптивного типа, у которых стопа может перемещаться требуемым образом в пространстве. В этом случае, обеспечив ускоренный перенос стопы, можно свести к минимуму энергозатраты на преодоление сил тяжести и сил инерции корпуса при его вертикальных перемещениях в каждом цикле движения. При этом будет иметь место рост мощности на преодоление сил инерции в движителе. Эта составляющая потерь станется наиболее существенной и будет определять суммарные затраты на движение, обуславливая их недопустимо высокий рост [15, 16]. Та же ситуация будет иметь место и при ускорении фазы переноса в шагающих машинах с цикловыми движителями, например, за счет механизма-корректора [14]. Увеличение длины шага, в обоих последних случаях, также будет сопровождаться уменьшением инерционной нагруженности и снижением средних энергозатрат на движение. При этом, мощность на прессование грунта, независимо от длины шага, будет полностью обеспечиваться за счет рекуперации энергии, затраченной на преодоление сил инерции в движителе.
Исследование выполнено при финансовой поддержке РФФИ в рамках научных проектов № 11-08-97061 р_поволжье_а, № 11-08-00955 а.
Список литературы
1. Планетоходы / Под. ред. А.Л. Кемурджиана. М.: Машиностроение, 1982. 319 c.
2. Шагающая машина «Восьминог» / Е.С. Брискин, В.В. Чернышев, А.В. Малолетов, В.В. Жога, Н.Г. Шаронов, К.В. Шаров, Н.Е. Фролова, Д.Н. Покровский // Мехатроника, автоматизация, управление. 2004. № 5. C. 48-49.
3. Пат. 2368529 РФ, В 62 D 57/032. Шагающая опора для транспортных средств повышенной проходимости / Е.С. Брискин, В.В. Чернышев; ВолгГТУ. 2009.
4. Брискин Е.С., Чернышев В.В., Жога В.В., Малолетов А.В. Опыт разработки и испытаний шагающих опор дождевальной машины // Тракторы и сельхозмашины. 2011. № 9. C. 27-31.
5. Пат. 2108708 РФ, А 01 G 25/09, В 62 D 57/02 Самоходная тележка многоопорной дождевальной машины / Е.С. Брискин, А.Е. Русаковский, В.В. Чернышев, В.В. Жога, А.Н. Попов, Н.Г. Вавилин, Н.И Аксенов, С.В. Шерстобитов, В.В. Черкасов, Н.В. Умнов; ВолгГТУ. 1998.
6. Динамика и управление движением шагающих машин с цикловыми движителями: монография / Е.С. Брискин, В.В. Жога, В.В. Чернышев, А.В. Малолетов; под ред. Е.С. Брискина. М.: Машиностроение, 2009. 191 с.
7. The Investigation of Walking Machines with Movers on the Basis of Cycle Mechanisms of Walking / E.S. Briskin, V.V. Chernyshev, A.V.Maloletov, V.V. Zhoga // The 2009 IEEE Int. conf. on Mechatronics and Automation: conf. proceedings. Changchun [China], 2009. P. 3631-3636.
8. Брискин Е.С., Чернышев В.В. Экспериментальные исследования динамики многоопорной шагающей машины с движителями лямбдаобразного вида // Изв. вузов. Машиностроение. 1999. № 4. C. 32-37.
9. Чернышев В.В. Полевые исследования шагающих машин // Тракторы и сельскохозяйственные машины. 2004. № 4. C. 20-22.
10. Briskin E.S., Chernyshev V.V., Maloletov A.V., Sherstobitov S.V., Grigorian G.G., Savin A.G. On ground and profile practicability of multi-legged walking machines // Climbing and Walking Robots. CLAWAR 2001: Proc. of the 4-th Int. Conf. London, 2001. P. 1005-1012.
11. Чернышев В.В., Брискин Е.С. Исследование взаимодействия шагающего движителя с экологически ранимым почвенным покровом // Безопасность жизнедеятельности. 2012. № 1. С. 34-38.
12. Брискин Е.С., Чернышев В.В. Цикловые механизмы шагания с пассивно управляемой стопой // Теория механизмов и машин. 2004. № 1. C. 80-88.
13. Пат. 2156711 РФ, В 62 D 57/032. Шагающая опора для транспортных средств повышенной проходимости / Д.Е. Охоцимский, Е.С. Брискин, В.В. Чернышев, С.В. Шерстобитов; ВолгГТУ. 2000.
14. Чернышев В.В. Структура энергозатрат шагающих машин с цикловыми движителями // Наука и образование. МГТУ им. Н.Э. Баумана. Электрон. журн. 2012. № 5. DOI: 10.7463/0512.0370775
15. Лапшин В.В. Модельные оценки энергозатрат шагающего аппарата // Изв. РАН. Механика твердого тела. 1993. № 1. С. 38-43.
Публикации с ключевыми словами: шагающие роботы, шагающий движитель, динамическое моделирование, структура энергозатрат, энергоэффективность движения
Публикации со словами: шагающие роботы, шагающий движитель, динамическое моделирование, структура энергозатрат, энергоэффективность движения
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||