научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
#7 Июль 2005
А. Б. Акаев, канд. техн. наук, МГТУ "Станкин"
Автоматизированное проектирование оптимальных технологических процессов, функционирующих в замкнутых эксплуатационных областях
Представлены метод синтеза оптимальных алгоритмов управления нелинейными динамическими объектами с обратной связью, функционирующими в условиях нелинейных фазовых ограничений, а также разработанные на его основе с применением технологии SADT технология и комплекс автоматизированного проектирования и моделирования технологических процессов в замкнутых эксплуатационных областях.
Одним из факторов, определяющих возможность предприятия эффективно функционировать в условиях конкуренции, является его оснащенность современными информационными технологиями. Их использование позволяет значительно сократить материальные, трудовые и временные затраты, повысить одновременно и производительность труда и качество продукции и, как следствие, поднять рейтинг предприятия и его продукции на внутреннем и внешнем рынках.
Задача обеспечения предприятий современными информационными технологиями предполагает, с одной стороны, разработку необходимых для них компьютеризированных интегрированных логистических систем, а с другой стороны, обеспечение соответствия этих программных продуктов международным стандартам.
Актуальной проблемой в области информационных технологий и, в частности, теории и практики автоматического управления динамическими объектами с обратной связью является разработка технологии и программного комплекса автоматизированного проектирования и моделирования оптимальных алгоритмов управления нелинейными динамическими объектами и, в частности, технологическими процессами (ТП), функционирующими в замкнутых эксплуатационных областях. Полученные алгоритмы должны обеспечивать гибкость и оптимальность динамики управляемых объектов в условиях замкнутости эксплуатационных областей, нелинейностей объекта, ограничений и целевой функции. Под нелинейностью технологического процесса можно понимать невозможность представления его математической модели с требуемой степенью адекватности во всем диапазоне изменения векторов управления и состояния функциями, принадлежащими классу линейных. Возникает необходимость использования функций, относящихся к классу локально-липшицевых, а в лучшем случае — непрерывно-дифференцируемых.
Выделенный класс ТП в значительной степени определяет точность и качество продукции машиностроения.
Использование для решения рассматриваемого класса задач известных программных комплексов проектирования и моделирования динамики замкнутых систем и процессов, как правило, затруднено их дороговизной, закрытостью, ориентацией, в большинстве своем, на линейные модели, сложностью учета весьма разнообразной специфики как отдельных прикладных задач управления с обратной связью, особенно при наличии фазовых ограничений, так и переходов от одних к другим, проблемами обеспечения на этапе синтеза заданных характеристик устойчивости и качества переходных процессов, сохранения и адаптации разработанных ранее моделей для решения других задач, отсутствием зачастую специализированного пользовательского интерфейса.
В то же время применяемые в международной практике при создании новых и анализе существующих программных систем стандарты IDEF0 и IDEF1 в рамках CALS-технологии, ориентированы на разработку и использование моделей, не обеспечивающих даже в совокупности адекватного представления функционирования логистической системы, как динамической системы, т. е. логистической системы, развивающейся в пространственных и временных координатах.
В силу этого очевидна необходимость разработки новых математических методов, информационных технологий, адаптации и расширения программных средств, обеспечивающих разработку и использование подобных моделей, для распространения их возможностей на решение класса задач автоматизированного проектирования ТП, которые могут рассматриваться как разновидность динамических объектов, т. е. описываются дифференциальными уравнениями в нормальной форме Коши:
![]() (1)
(1)
где x — n-мерный вектор состояния; u — m-мерный вектор управления; f— непрерывная по x и u вектор-функция, удовлетворяющая условиям существования и единственности решения уравнения (1), а ограничения на фазовые координаты имеют вид
![]() (2)
(2)
где g — непрерывно-дифференцируемая по x s-мерная вектор-функция, а неравенства (2) выполняются покомпонентно.
Для решения перечисленных задач разработан метод синтеза оптимальных алгоритмов управления с обратной связью нелинейными динамическими объектами, функционирующими в условиях нелинейных фазовых ограничений [2]—[4].
Метод включает сформулированные и доказанные необходимые и достаточные
условия оптимальности и позволяет аналитически синтезировать оптимальные
алгоритмы управления с обратной связью в общем виде с учетом фазовых
ограничений, обеспечивающие при условии существования решения заданные
показатели точности и качества процессов управления в замкнутой
эксплуатационной области. Для учета фазовых ограничений в критерий
оптимальности вводится аддитивный член вида ![]() где,
где,
![]() (3)
(3)
Q1 — неотрицательно определенный весовой коэффициент;
 (4)
(4)
![]() т. е. z(g) = sat(g).
т. е. z(g) = sat(g).
Метод не предполагает при расчете параметров алгоритма управления
процедур выбора весовых коэффициентов функционала качества, решения нелинейных
матричных уравнений, а также решения двухточечной краевой задачи. Последнее
позволило при проектировании алгоритмов управления в общем виде использовать
линейные нестационарные модели динамического объекта, фазовых ограничений,
ошибки управления. Благодаря использованию оригинального функционала качества,
включающего аддитивно член вида  , удалось получить связь между
весовыми коэффициентами функционала качества, с одной стороны, и параметрами алгоритма
управления и заданными показателями точности и качества процессов управления, с
другой.
, удалось получить связь между
весовыми коэффициентами функционала качества, с одной стороны, и параметрами алгоритма
управления и заданными показателями точности и качества процессов управления, с
другой.
На основе представленного метода, а также технологии SADT с помощью современных программных и вычислительных средств разработаны достаточно простая и эффективная технология проектирования и моделирования динамических объектов и соответствующий программный комплекс.
Технология автоматизированного проектирования и моделирования технологических процессов, функционирующих в замкнутых эксплуатационных областях
Технология автоматизированного проектирования и моделирования технологических процессов, функционирующих в условиях фазовых ограничений, предназначена для разработки алгоритмов функционирования цифровых систем управления и исследования динамики оптимальных ТП в замкнутых эксплуатационных областях, последующего выявления невозможности реализации отдельного ТП или целого их класса с заданными качественными, точностными и экономическими характеристиками при использовании рассматриваемых технических средств (станка, инструмента, заготовки), а также предполагаемого алгоритма управления без натурного или полунатурного моделирования.
Важной функцией разработанной технологии является формирование рекомендаций или требований к отдельным элементам системы станок-приспособление—инструмент—деталь (СПИД) при проектировании новых ТП на существующих технических средствах (станках), либо ко всему комплексу система управления — СПИД для вновь разрабатываемых технических средств (станков) на ранних этапах их проектирования, позволяющих обеспечить заданные технико-экономические показатели при реализации заданного класса ТП.
Наконец, предлагаемая технология в единстве с реализующим ее программным комплексом представляет собой достаточно удобный и наглядный инструмент для консультаций, подготовки и переподготовки высококвалифицированных специалистов, занимающихся научно-исследовательскими и опытно-конструкторскими работами в области автоматического управления динамическими объектами (ДО).
Предлагаемая технология представляет собой упорядоченную совокупность операций по обработке и анализу экспериментальной и формированию аналитической информации: о ТП, как цели управления, о системе СПИД, фазовых ограничениях; о формализации в необходимом в соответствии с разработанным методом виде задачи управления ТП. Последняя задача как задача оптимального управления вводится в специальный моделирующий программный комплекс (МПК), либо возможна адаптация уже имеющихся программных модулей к решению сформированной задачи: проведение цикла моделирования; анализ результатов этой технологии — моделирования, формирование выводов и оформление их в требуемом заказчику или руководителю проекта виде.
Состав и структура информационной технологии в области моделирования и проектирования определяется ее назначением, составом, структурой и физической сущностью моделируемых элементов, требованиями, предъявляемыми к исследуемой системе и ее элементам, ограничениями, накладываемыми на процесс их функционирования, с одной стороны, а также используемыми для решения поставленной задачи математическими методами, с другой стороны.
Основу предложенной технологии составляют разработанный метод аналитического синтеза замкнутых систем управления нелинейными ДО с учетом нелинейных фазовых ограничений, полученные с его помощью алгоритмы управления в общем виде, позволяющие обеспечить на этапе синтеза заданные характеристики устойчивости и качества процессов управления, а на этапе моделирования заданные, либо достижимые показатели точности. Расчет в текущий момент времени конкретных значений параметров алгоритмов управления не предполагает решения нелинейных матричных уравнений типа уравнений Риккати, что характерно для большинства традиционных подходов к решению задач оптимального управления или идентификации состояния ДО. Это оказало существенное влияние как на трудоемкость и эффективность процессов проектирования системы управления и моделирования замкнутого ДО, так и на требования к реализующим эти алгоритмы вычислительным средствам.
Разработанная технология по составу, структуре, форматам входных данных и представленных результатов в определенной степени может рассматриваться как новая разновидность SADT-технологии. При этом новизна ее обуславливается, главным образом, значительным расширением класса решаемых с ее помощью задач за счет использования нового математического метода, применением в моделирующем программном комплексе современных программных средств, и, как следствие, значительным сокращением сроков проектирования, как систем управления, так и динамических объектов в целом.
К основным преимуществам SADT-технологии по сравнению с другими подходами к решению достаточно сложных задач структурного анализа, синтеза, и последующего моделирования, которые обусловили выбор ее в качестве основного средства при решении рассматриваемой задачи являются:
· строгая формализация (упорядоченность) самого процесса проектирования, а также оформления и модификации результатов, что обеспечивает удобство восприятия и анализа моделей, а также простоту стыковки моделей разных уровней, либо полученных разными разработчиками;
· достаточный компромисс между наглядностью моделей и их информативностью; каждая функция имеет "бесконечное заполнение с возможностью прокрутки";
· развитая система редактирования и коррекции, как в плане удобства ввода изменений на любом уровне иерархии диаграмм, так и в плане учета их в случае необходимости на связанных с редактируемым элементом диаграммы уровнях SADT-модели;
· значительные удобства формирования диаграмм, обеспечивающие, с одной стороны, графические возможности при формировании блоков на уровне современных CAD-программных комплексов, а с другой стороны, автоматическое изображение дуг любой сложности в соответствии с требованиями SADT-технологии.
Одной из важнейших особенностей применения SADT-технологии при решении рассматриваемого класса задач является его двоякость, т. е. возможность, с одной стороны, разработки с ее помощью технологий проектирования технологических процессов, а с другой, использования полученных результатов для проектирования собственно технологических процессов изготовления детали.
В наиболее обобщенной формулировке назначением полученной с использованием SADT-подхода технологии является проектирование нелинейных технологических процессов (ТП) при наличии нелинейных фазовых ограничений.
На рис. 1 представлена SADT-диаграмма 0-уровня, где указаны входные, управляющие данные, средства (механизмы), необходимые для решения поставленной задачи, и выходные данные.
Дальнейшая декомпозиция рассматриваемой задачи, произведенная на основе SADT-технологии с учетом особенностей разработанного метода, предлагаемых для использования программно-аппаратных средств, а также анализа требований, предъявляемых в современных условиях к ТП, позволила получить комплекс SADT-диаграмм, представленных на рис. 2—5.
SADT-диаграмма уровня АО (рис. 2) сформирована на основании достаточно традиционного подхода к процессу проектирования подобных процессов и предполагает наличие четырех основных функций: управление проектированием, непосредственно разработка варианта ТП, оценка его себестоимости и оценка его качества (блоки А1-А4)..
Наиболее сложной и представляющей интерес с точки зрения разрабатываемой технологии является функция А2 — "Разработать вариант технологического процесса". Результатом декомпозиции этого блока является SADT-диаграмма уровня А2 (рис, 3), где для блока А2 представлены входные (11—13), управляющие — по срокам проектирования (выход блока А1), и по производительности (С2) данные, необходимые средства (механизмы) (Ml—Мб), а также выходная информация: либо заданный ТП (без учета его себестоимости), либо требования по корректировке входных или управляющих данных. Последняя ситуация возникает в случае, когда анализ результатов моделирования позволяет сделать вывод о невозможности в текущей постановке задачи рассчитать параметры алгоритма оптимального управления, реализующего заданный ТП с заданной точностью за заданное время в условиях поставленных ограничений.
Для блока А4 разработан комплекс моделей и диаграмм более низкого уровня в соответствии с предполагаемым перечнем технологических процессов и алгоритмами оценки качества их реализации.
При разработке технологии дальнейшему анализу и структуризации были подвержены функции А21 и А23, результатом чего явились SADT-диаграммы уровней А21 и А23 (рис. 4, 5).

Цель: Разработать технологию автоматизированного проектирования и моделирования нелинейных технологических процессов при наличии нелинейных фазовых ограничений и написать учебное пособие.
Точка зрения: Главного инженера
Рис. 1. SADT-диаграмма 0-уровня технологии автоматизированного проектирования и моделирования нелинейных ТП при наличии нелинейных фазовых ограничений
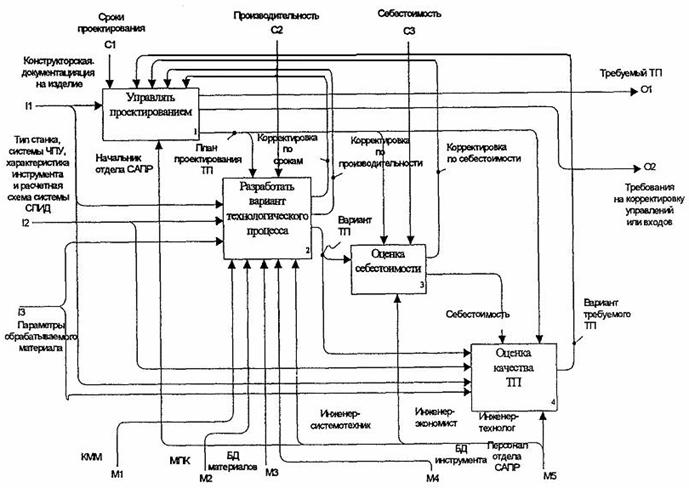
Рис. 2. SADT-диаграмма уровня АО

Рис. 3. SADT-диаграмма уровня А2
Разработанная разновидность SADT-технологии распространена не только на процессы проектирования технологических процессов как непрерывных динамических объектов, т. е. непосредственно процессов обработки, но и на процессы их подготовки, обеспечения, межоперационные переходы. Однако для оптимизации этих этапов технологических процессов используются другие математические подходы.

Рис. 4. SADT-диаграмма уровня А21
Из приведенных SADT-диаграмм очевидно, что технология поэтапного автоматизированного проектирования и моделирования систем управления динамических объектов, функционирующих в замкнутых эксплуатационных областях, заключается в выполнении следующих этапов:
· построение нелинейных математических моделей динамического объекта, фазовых ограничений, ошибки управления, т. е. предварительный анализ подлежащего решению класса задач, либо задачи, выбор системы координат, векторов состояния и управления и формирование в выбранной системе координат нелинейных математических моделей динамического объекта в виде системы дифференциальных уравнений в нормальной форме Коши (1), фазовых ограничений и уравнений границ (3), а также ошибки управления, как нелинейных вектор - функций вектора состояния динамического объекта и времени. Указанные функции в выражениях могут быть заданы аналитически, таблично, либо смешанным образом, поэтому часто возникает необходимость использования методов и соответствующих им алгоритмов аппроксимации. Кроме того, построенные модели позволяют исследователю, обратившись к базе данных, содержащей разработанные ранее модели, сделать вывод о возможности использования в процессе проектирования готовых программных модулей;
· разработка, в случае отсутствия необходимых аналогов, программных модулей, реализующих полученные нелинейные математические модели и позволяющих в каждый момент времени рассчитать положение границ эксплуатационной области, состояние динамического объекта, значение вектор - функций фазовых ограничений, ошибки управления и ввод их в комплекс математических моделей (КММ) и соответствующие базы данных (БД) или использование уже имеющихся в соответствующей программной единице при последующем формировании требуемой совокупности моделей (блоки А211—А214 диаграммы уровня А21);
· моделирование свободного динамического объекта в отсутствии, а также в условиях фазовых ограничений, проверка и обеспечение адекватности этих моделей путем выбора шага интегрирования дифференциальных уравнений варьированием в сторону увеличения, либо уменьшения при многократном цифровом моделировании свободного динамического объекта в условиях фазовых ограничений в режимах, предусматриваемых постановкой задачи. Рациональным является то значение шага интегрирования, начиная с которого поведение моделей соответствует физике процессов, а также происходит стабилизация поведения динамического объекта, конфигурации допустимой области, и дальнейшее уменьшение ее не приводит к их существенному изменению (блоки А231—А233 диаграммы уровня А23);
· формирование в общем виде в выбранной системе координат линейных нестационарных математических моделей динамического объекта, фазовых ограничений и ошибки управления, а также модели вектор - функции г вида (7)—(9), (11)— (14), т. е. получение алгоритмов расчета элементов матриц A(t), B(t), G(t), H(t) и векторов C(t), g(t), h(t), z1{t). Эти алгоритмы получаются путем автоматического аналитического дифференцирования по соответствующим аргументам функций f, g, h, z в моделирующем программном комплексе (МПК). В случае задания каких-либо параметров этих функций табличным, либо графическим способом формируемые алгоритмы обеспечивают аппроксимацию и численное дифференцирование таких зависимостей;
· ввод в диалоговом режиме в моделирующий программный комплекс параметров исходного и заданного состояний динамического объекта, начального и конечного моментов времени, а также требуемых характеристик точности и качества процессов управления (блок А231);
· собственно моделирование динамики замкнутого динамического объекта в условиях фазовых ограничений, в том числе циклическое выполнение следующих операций (рис. 6): расчет значений правых частей нелинейных моделей, конкретных значений коэффициентов всех линейных нестационарных моделей для данных значений векторов состояния и управления и для данного шага интегрирования (блок А2342); проверка управляемости линейной нестационарной математической модели динамического объекта и совместности нестационарной математической модели фазовых ограничений (определение возможности решения вспомогательной задачи в отсутствие всяких ограничений), а также проверка совместности линейной нестационарной модели фазовых ограничений, т. е. не является ли соответствующая им допустимая область в какой-либо момент времени пустой (блок А2343); проверка выдерживания фазовых ограничений (принадлежность вектора состояния допустимой области), расчет нового вектора управления в соответствии с разработанными и введенными в МПК алгоритмами, расчет нового вектора состояния путем интегрирования нелинейной модели динамического объекта как вектор-функции текущего вектора состояния и рассчитанного вектора управления на один шаг, проверка условия окончания моделирования и завершение моделирования при его выполнении (блок А2344);
· анализ результатов цифрового моделирования и принятия решений либо о применимости разработанной системы управления для решения рассмотренного класса задач, либо о минимальной конфигурации и характеристиках технических и технологических средств самого объекта управления, т. е. определение множества задач беспрограммного управления рассматриваемым динамическим объектом в заданной эксплуатационной области, для решения которых с требуемой точностью могут быть использованы полученные алгоритмы. В комплекс вводятся параметры начального состояния динамического объекта, ошибки управления, рассматриваемый интервал времени, а также величина λr, определяющая время переходного процесса в замкнутой оптимальной системе при выходе ее на границу фазовых ограничений, после чего комплекс переходит в автоматический режим моделирования движения динамического объекта в условиях фазовых ограничений. При этом в цикле, состоящем из числа итераций, соответствующего выбранному шагу интегрирования и заданному интервалу времени, последовательно осуществляется анализ принадлежности исходной нелинейной функции фазовых ограничений допустимой области, расчет параметров линейных нестационарных моделей и вектор-функции z, расчет вектора управления в соответствии с разработанными алгоритмами и интегрирование исходной нелинейной модели динамического объекта. По завершении каждого цикла моделирования определяется точность решения задачи управления и при наличии нарушений фазовых ограничений — максимальное значение и длиельность во времени заброса.

Рис. 5. SADT-диаграмма уровня А23

Рис. 6. SADT-диаграмма уровня А234
Принятие разработчиком решения о применимости алгоритма управления, соответствующего выбранной величине λr, осуществляется на основе анализа точности решения основной задачи управления и максимального значения заброса Δg. Если последняя удовлетворяет условию
![]()
то при выполнении требований по точности решения задачи управления, характеризуемой ошибкой e1(t), реализованный алгоритм оптимального управления считается приемлемым. Для строгого выдерживания фазовых ограничений вектор-функции g * i (t), gi* (t) корректируются на значение | Δg1| в сторону уменьшения по абсолютному значению.
Если неравенство не выполняется, то необходима корректировка величины λr в сторону уменьшения длительности переходного процесса и повторение цикла моделирования. Наконец, в случае, если значение заброса сравнимо с шириной допустимой области, определяемой как
![]()
![]()
а длительность заброса близка к рассматриваемому интервалу времени, то разработчик может принять решение о невозможности решения задачи в рассматриваемой постановке и необходимости изменения каких-либо исходных данных (например, интервала времени).
Таким образом, совокупность экспериментов по синтезу и моделированию динамики замкнутой оптимальной системы в соответствии с разработанной технологией позволяет установить определяющие длительности переходных процессов в замкнутой системе значений параметров закона управления λ, λr, реализация которого в системе управления позволяет обеспечить решение заданного множества задач беспрограммного управления, либо выделить подмножество задач, которые могут быть решены с заданными точностью и качеством в условиях фазовых ограничений.
Программный комплекс автоматизированного проектирования и моделирования технологических процессов, функционирующих в замкнутых эксплуатационных областях
Использование в разработанной технологии нового математического метода синтеза систем
управления, появление высокопроизводительной вычислительной техники нового поколения, а также программных средств, оснащенных принципиально новым пользовательским интерфейсом, определили необходимость и возможность разработки соответствующего современным требованиям специализированного программного комплекса.
Многолетний опыт работы над рассматриваемой проблемой с применением разнообразных программно-аппаратных средств позволил остановиться в соответствии с перечисленными требованиями на использовании в качестве основы для разработки программного комплекса на универсальной системе математических расчетов Math-CAD версий PLUS 6.0 PRO и выше.
Основными свойствами, определившими такой выбор программного средства явились:
· ользовательский интерфейс, обеспечивающий наибольшее приближение процесса проектирования с помощью программного комплекса к естественному образу действий постановщика задач, разработчика, математика и других специалистов, участвующих в проектировании технологического процесса;
· совместимость отдельных модулей, а также программного комплекса в целом с различными наиболее часто применимыми графическими, табличными приложениями, базами данных; возможность взаимного импорта и экспорта информации различного вида;
· широкие графические возможности как в статике, так и в динамике, в том числе в многоцветном трехмерном представлении;
· высокоразвитые математические аппараты для решения задач векторно-матричной алгебры, дифференциальных уравнений большой размерности, аппроксимации таблично, либо графически заданных многомерных зависимостей;
· наличие средств аналитического дифференцирования различных математических выражений;
· простота оперативного реформирования структуры, состава и размерности векторно-матричных выражений;
· развитая диагностика разрабатываемых и уже используемых программных модулей;
· быстрота и простота получения требуемой как итоговой, так и промежуточной информации о ходе процессов моделирования и проектирования в целом;
· возможность функционирования в сетевом варианте;
· возможность совмещения расчетной и текстовой информации, обеспечивающая удобство оформления и понимания назначения и логики работы программных модулей и превращающая их практически в электронные справочники или учебники.
Разработанный и постоянно совершенствующийся программный комплекс имеет состав и структуру, обеспечивающие решение всех функциональных задач, представленных в разработанной технологии, а также необходимый информационный обмен как между своими модулями, так и между ними и внешней средой. В укрупненном виде структура программного комплекса автоматизированного проектирования и моделирования нелинейных технологических процессов в условиях нелинейных ограничений представлена на рис. 7. При переходе к решению задач управления динамическими объектами других типов технология проектирования и структура программного комплекса изменений не требуют. Необходимо лишь дополнить комплекс нелинейных математических моделей элементами, соответствующими физике данного динамического объекта или их класса, а также расширить базы данных моделями аэродинамики, гидродинамики, атмосферы.

Рис.7. Структура программного обеспечения
Технология и программный комплекс были эффективно использованы при проектировании систем управления летательных аппаратов, металлорежущих станков различных типов, а также в учебном процессе при подготовке инженеров и переподготовке специалистов.
Список литературы
1. Акаев А. Б., Зайцева Л. В., Мурашов Д. М. Управление движущимися объектами. — Препринт. — М.: АН СССР, Научный совет по комплексной проблеме "Кибернетика", 1988. 52 с.
2. Акаев А. Б., Мурашов Д. М. Алгоритмическое обеспечение интегрированной системы управления с учетом нелинейностей объекта // Вопросы кибернетики. Управляющие вычислительные системы движущихся объектов. — М.: АН СССР, Научный совет АН СССР по комплексной проблеме "Кибернетика", 1988. С. 80-90.
3. Акаев А. Б. Аналитическое проектирование систем управления динамических объектов с учетом ограничений на фазовые координаты // Вопросы кибернетики. Методы теории систем и информационных технологий. М.: АН СССР, Научный совет АН СССР по комплексной проблеме "Кибернетика", 1989. С. 85—105.
4. Акаев А. Б. Аналитический синтез систем управления многосвязных динамических объектов. // Тезисы докладов VI Всесоюзного совещания "Управление многосвязными системами". М.: Институт проблем управления, 1990. С. 46—47.
5. Акаев А. Б., Павлов В. В., Иванов Г. Н. Автоматизированное проектирование оптимальных автоматических технологических процессов, функционирующих в замкнутых эксплуатационных областях // Тезисы докладов 3-го международного конгресса "Конструкторско-технологическая информатика" - КТИ-96, М.: Изд. МГТУ "СТАНКИН", 1996.
6. Акаев А. Б., Павлов В. В., Дерницын В. М., Иванов Г. Н. Нелинейные технологические процессы, функционирующие в замкнутых эксплуатационных областях // Тезисы докладов II МНТК "Динамика систем, механизмов и машин". Москва-Омск.: ОмГТУ, 1997.
ИНФОРМАЦИОННЫЕ ТЕХНОЛОГИИ, № 8, 1998
СИСТЕМЫ АВТОМАТИЗИРОВАННОГО ПРОЕКТИРОВАНИЯ
Ключевые слова: САПР, SADT, оптимизация технологических процессов, замкнутые системы управления, диаграммы уровней.
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||