научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
#3 Март 2005
ИСПОЛНИТЕЛЬНЫЕ ОРГАНЫ СИСТЕМ УПРАВЛЕНИЯ ТЕМПЕРАТУРНЫМИ РЕЖИМАМИ КОСМИЧЕСКИХ АППАРАТОВ
ДЛЯ ДАЛЬНИХ ПЕРЕЛЕТОВ
![]()
УДК 681.51.52
Митрохин Валентин Валерьевич
МОУ Щелковский лицей, Московская область, 11 класс
Научный руководитель:
Зорин Юрий Алексеевич,
кандидат технических наук,
начальник отделения Ракетно-космической корпорации
«Энергия» им. С.П. Королева
введение
Возможность осуществления пилотируемого полета к Марсу с высадкой экспедиции на его поверхность обсуждается и теоретически исследуется давно [1]. Однако, в последние годы интерес к этой проблеме значительно усилился. Так, на пресс-конференции по теме «Проект пилотируемого полета на Марс» 05.07.02 ведущими специалистами ракетно-космической отрасли было констатировано: «При нынешних темпах развития ракетно-космической техники с использованием современных научных исследований и разработок человечество сможет к концу следующего десятилетия совершить экспедицию к Красной планете» [2].
Высказанное недавно предложение Президента США об организации экспедиции на Марс может дать мощный импульс развитию этого проекта. Из истории известно, что внимание к проблеме и политическая воля руководителей государств способствует значительному сокращению времени реализации технических проектов.
Проект полета на Марс это глобальная задача, реализация которой может стать своеобразным буксиром для развития науки и техники в целом.
Такой проект, безусловно, должен быть международным: опыт строительства международной космической станции (МКС) показывает эффективность международной кооперации, обусловленную не только сложением финансовых, но и интеллектуальных ресурсов.
На упомянутой пресс-конференции было подчеркнуто, что наша страна на нынешнем этапе освоения космоса лучше всех готова к полету корабля с экипажем на Марс. «Самые предварительные расчеты показывают, что без участия России затраты на марсианский проект вырастут в 2-3 раза». В ряде направлений создания ракетно-космической техники Россия достигла непревзойденных результатов. Прежде всего, это технология автоматической стыковки на орбите тяжелых модулей. Это и достижения космической медицины, обеспечившие длительные орбитальные полеты на станции «Мир». Так российский космонавт В. Поляков провел на орбите почти 1,5 года и доказал, что человек в состоянии добраться до Марса и вернуться обратно здоровым и работоспособным.
По оценкам российских специалистов экипаж космического корабля должен быть международным и состоять из 6 человек: командир, пилот, бортинженер, врач, биолог и геолог. При этом члены экипажа должны совмещать профессии и выполнять дополнительные функции и обязанности. В недавнем телевизионном выступлении руководитель Российского авиационно-космического агентства (РАКА) Ю.Н. Коптев, сообщил, что в РКК «Энергия» уже ведутся проектные работы по созданию шестиместного космического корабля.
Полет к Марсу принципиально отличается от длительного орбитального полета тем, что он будет полностью автономным. Поэтому одной из актуальнейших задач, требующих решения в ближайшее время, является необходимость обеспечения нормальной жизни и деятельности экипажа в течение длительного автономного полета, без снабжения с Земли. Указанные функции на жилом модуле корабля будет выполнять система жизнеобеспечения (СЖО).
Настоящая работа посвящена изучению существующих СЖО, в наибольшей степени одной из подсистем СЖО - системы обеспечения температурных режимов (СОТР).
Целью настоящей работы является разработка предложений по модернизации исполнительных органов системы управления температурными режимами (электронасосов, вентиляторов, регуляторов расхода) для удовлетворения требований по обеспечению дальних автономных перелетов.
1. СИСТЕМЫ ЖИЗНЕОБЕСПЕЧЕНИЯ ЭКИПАЖА
В космическом полете, когда человек полностью изолирован от земной биосферы, ее функции ложатся на специальные бортовые системы космического летательного аппарата - системы жизнеобеспечения экипажа.
Эти системы должны обеспечивать:
o снабжение человека необходимыми для жизни веществами;
o сбор и удаление продуктов жизнедеятельности;
o создание и поддержание в обитаемом отсеке космического летательного аппарата необходимых условий атмосферной среды, оптимальных для жизни и работы человека.
В космическом полете определяющими критериями совершенства систем жизнеобеспечения становятся минимальная масса и энергопотребление систем. Полная автономность функционирования и необходимость непрерывного действия систем жизнеобеспечения в полете выдвигают требование повышенной их надежности. В пилотируемых полетах небольшой продолжительности задачи систем жизнеобеспечения успешно решаются на основе принципа запаса веществ (кислорода, воды, пищи). По мере увеличения продолжительности полетов масса таких систем достигает неприемлемых величин.
Более длительные космические полеты требуют перехода к замкнутым системам, обеспечивающим круговорот веществ в обитаемых отсеках космического аппарата на основе регенерации необходимых человеку веществ из продуктов его жизнедеятельности подобно тому, как это осуществляется в земной природе. Переход от запасов веществ к замкнутым системам снижает их массу, однако существенно повышает затраты энергии, которые также сводятся к эквивалентной массе систем энергопитания. Очевидно, что для сверхдлительного автономного полета на Марс в условиях ограничения объемов, масс и энергопотребления оптимальной окажется комбинированная СЖО, основанная на запасах продуктов питания, частично пополняемых витаминной оранжереей, с физико-химической регенерацией воды и кислорода и химико-биологической утилизацией отходов человеческой деятельности. Модуль для высадки на Марс должен быть оснащен СЖО, основанной на запасах.
Рис. 1 иллюстрирует массообмен и энергообмен организма человека с окружающей средой и обусловленный ими состав СЖО [3].
Человек в процессе жизнедеятельности потребляет:
o кислород из атмосферы при дыхании,
o воду питьевую и воду, содержащуюся в продуктах питания,
o пищевые вещества, содержащиеся в продуктах питания - белки, жиры и углеводы.
В биохимических реакциях организма пищевые вещества окисляются кислородом (как бы сгорают), выделяя при этом энергию необходимую для жизнедеятельности человека. Полученная энергия используется на работу внутренних органов (сердце, легкие), на механическую мышечную работу человека и в итоге переходит в тепло, которое организм выделяет в окружающую среду. Все продукты реакций, а также потребленная человеком из внешней среды вода полностью выделяется организмом в окружающую среду:
o углекислый газ удаляется в атмосферу при дыхании;
o шлаковые вещества выводятся вместе с потребленной водой в виде жидких отходов жизнедеятельности - урины (т.е. мочи) и в виде твердых отходов;
o часть воды выделяется путем испарения в атмосферу через кожу и через легкие при дыхании.
Поскольку человеку в сутки требуется в среднем 1,75 кг пищи (из них твердых веществ около 0,6 кг), 7,3 кг воды (2,5 кг питьевой и 4,8 кг технической) и 0,9 кг кислорода, то при использовании «расходной» СЖО для экипажа из шести человек в двухлетней марсианской экспедиции необходимы запасы более чем в 50 т. Использование регенеративной СЖО позволит уменьшить эту массу в 8 - 10 раз, в основном за счет многократного использования воды и кислорода.
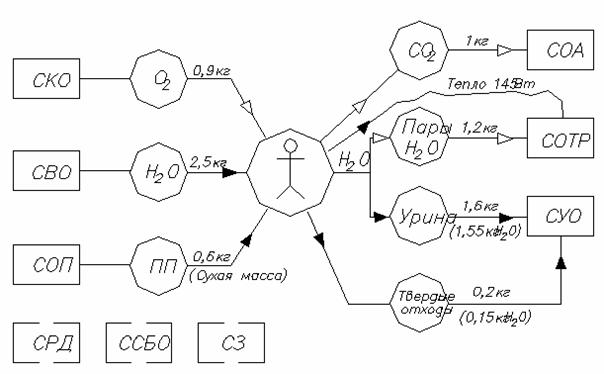
Рис. 1. Массообмен и энергообмен человека с окружающей средой и состав СЖО
СКО – система кислородообеспечения; СВО – система водообеспечения; СОП – средства обеспечения питанием; ПП – продукты питания; СОА – система очистки атмосферы; СОТР – система обеспечения теплового режима и влажности воздуха; СУО – система удаления отходов; СРД – система регулирования влажности в отсеке; ССБО – средства санитарно-бытового обеспечения; СЗ – средства индивидуальной защиты (скафандры)
Показанный на рис. 1 массообмен человека с окружающей средой определяет основные задачи СЖО, их состав и назначение.
Система кислородообеспечения (СКО) должна обеспечивать подачу в атмосферу обитаемого отсека кислорода и поддерживать его парциальное давление в заданном диапазоне.
Система очистки атмосферы (СОА) должна обеспечивать сбор и удаление из атмосферы углекислого газа, поддерживать его парциальное давление, а также обеспечивать очистку атмосферы от вредных микропримесей, выделяемых человеком и оборудованием.
Эти две системы часто функционально объединяются в одну - систему обеспечения газового состава атмосферы (СОГС).
Система водообеспечения (СВО) должна обеспечивать экипаж питьевой водой.
Система питания экипажа (СОП) должна обеспечивать космонавта полноценным питанием, с рационом, содержащим белки, жиры и углеводы в требуемом соотношении.
Система обеспечения теплового режима и влажности атмосферы (СОТР) должна осуществлять: отвод из отсека тепла, выделяемого человеком и оборудованием, удаление из атмосферы паров воды, выделяемых человеком, а также поддерживать заданную температуру, относительную влажность и циркуляцию воздуха.
Система удаления отходов (СУО) должна обеспечивать сбор и изоляцию от атмосферы жидких (урины) и твердых продуктов жизнедеятельности.
Система регулирования давления (СРД) должна поддерживать общее давление атмосферы, осуществлять контроль герметичности отсека и компенсацию утечек воздуха из отсека.
Помимо этих систем в состав комплекса СЖО входят также следующие средства.
Средства санитарно-бытового обеспечения (ССБО), предназначенные для личной гигиены экипажа (умывание, душ) и удовлетворения бытовых нужд - одежда, спальные принадлежности, предметы для санитарной уборки отсеков.
Средства индивидуальной защиты экипажа (СЗ):
o аварийно-спасательные скафандры, дыхательные маски, обеспечивающие защиту экипажа в аварийных ситуациях,
o космические скафандры для обеспечения выхода и работы человека в космическом пространстве.
Средства медико-биологического обеспечения, включающие приборы для медицинского контроля состояния экипажа, тренажеры для физической тренировки экипажа в полете, медикаменты.
2. СИСТЕМА ТЕРМОРЕГУЛИРОВАНИЯ КОСМИЧЕСКОГО АППАРАТА
Система обеспечения теплового режима (СОТР) космического аппарата (КА) в свою очередь состоит из трех подсистем:
- система теплозащиты;
- система кондиционирования воздуха (СКВ) и формирования циркуляционных полей;
- система терморегулирования (СТР).
Основной задачей СОТР является поддержание комфортных условий окружающей среды. Комфортные условия для длительных полетов определяются следующими численными значениями [4]:
![]() - температура;
- температура;
![]() - относительная влажность;
- относительная влажность;
![]() - скорость циркуляции воздуха;
- скорость циркуляции воздуха;
![]() - давление.
- давление.
Обеспечить постоянство температуры сложно, а в
продолжительном полете и нецелесообразно, так как длительное пребывание
человека в стабильных условиях снижает его адаптационные возможности организма.
Поэтому обеспечиваемый современными СТР температурный диапазон ![]() является более
предпочтительным.
является более
предпочтительным.
За обеспечение температурных режимов КА отвечает система СТР.
Впервые СТР были разработаны в РКК «Энергия» в конце 50-х годов для поддержания заданных температурных режимов отдельных приборов первых КА - спутников связи «Молния». С появлением обитаемых КА функции СТР расширялись и усложнялись.
Рассмотрим подробнее структуру современной СТР.
Основными задачами СТР в СЖО является выведение из КА в наружный космос тепла, выделяемого космонавтами и аппаратурой при ее работе, и поддержание заданных температур атмосферы в обитаемых отсеках.
Общую задачу СТР можно условно разбить на внутреннюю и внешнюю.
Внутренняя задача - это организация отвода тепла и регулирование температур атмосферы отсеков путем конвективного теплообмена с рабочим телом - теплоносителем СТР.
Внешняя задача - обеспечение передачи этого тепла путем излучения в наружное пространство в условиях космического полета.
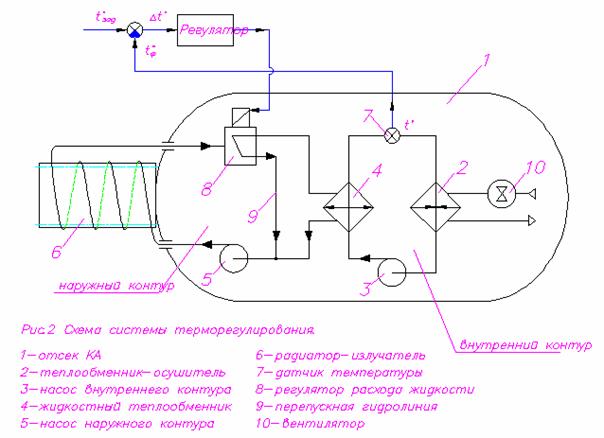
Тепло из обитаемых отсеков выводится циркулирующим теплоносителем системы терморегулирования и подается на специальный радиатор-излучатель, расположенный снаружи герметичных отсеков. Температура радиатора может колебаться в зависимости от внутреннего и внешнего потока тепла и может принимать довольно низкие значения при попадании его в солнечную тень от КА или при полете КА в тени Земли. Поэтому схема СТР обычно строится двухконтурной - в наружном контуре радиатора циркулирует низкозамерзающий теплоноситель, во внутреннем контуре теплообменников отсека циркулирует теплоноситель, главные требования к которому - нетоксичность, безопасность, негорючесть.
Упрощенная схема двухконтурной системы
терморегулирования показана на рис. 2. Тепло из отсеков 1 при помощи
вентилятора 10, обеспечивающего циркуляцию воздуха через внутренние
теплообменники (или теплообменники-осушители) 2, передается теплоносителю,
циркулирующему по внутреннему контуру с помощью электронасосного агрегата (ЭНА)
3, и затем через промежуточный жидкостно-жидкостный теплообменник 4 передается
теплоносителю внешнего контура, имеющему более низкую температуру. Нагретый
теплоноситель после теплообменника 4 подается отдельным ЭНА 5 на радиатор 6,
излучающий тепло в наружное пространство. Регулирование температуры
теплоносителя на входе в теплообменники 2 осуществляется по датчику температуры
7, выдающему сигнал о фактическом значении температуры ![]() в систему управления СУ
СОТР. Фактическое значение температуры
в систему управления СУ
СОТР. Фактическое значение температуры ![]() в СУ сравнивается с заданным значение
в СУ сравнивается с заданным значение ![]() и вырабатывается
сигнал рассогласования (ошибки)
и вырабатывается
сигнал рассогласования (ошибки) ![]() . В соответствии со знаком сигнала
. В соответствии со знаком сигнала ![]() электронный
регулятор выдает командный сигнал на электромеханический регулятор расхода
жидкости (РРЖ) 8, который перераспределяет общее количество жидкости Qт, прошедшей через радиатор 6, между гидролинией,
идущей через теплообменник 4, и перепускной гидролинией 9, из которой
теплоноситель снова направляется в радиатор. Например, если фактическая
температура
электронный
регулятор выдает командный сигнал на электромеханический регулятор расхода
жидкости (РРЖ) 8, который перераспределяет общее количество жидкости Qт, прошедшей через радиатор 6, между гидролинией,
идущей через теплообменник 4, и перепускной гидролинией 9, из которой
теплоноситель снова направляется в радиатор. Например, если фактическая
температура ![]() меньше
заданной
меньше
заданной ![]() ,
то РРЖ уменьшает количество холодной жидкости Qт, идущей через теплообменник и, тем самым уменьшает
вынос тепла из внутреннего контура. Через заданное время
,
то РРЖ уменьшает количество холодной жидкости Qт, идущей через теплообменник и, тем самым уменьшает
вынос тепла из внутреннего контура. Через заданное время ![]() происходит сравнение нового
значения
происходит сравнение нового
значения ![]() с
заданным значением
с
заданным значением ![]() и, при необходимости, вновь
производится корректировка расхода теплоносителя через теплообменник.
и, при необходимости, вновь
производится корректировка расхода теплоносителя через теплообменник.
При изменении уставки (заданного значения температуры)
система аналогичным образом перенастраивается на поддержание нового значения
температуры ![]() .
.
Анализ структуры СТР показывает, что она содержит три типа электромеханических агрегатов: электронасосные агрегаты, регуляторы расхода жидкости и вентиляторы. От степени совершенства этих агрегатов в значительной мере зависят энергомассовые характеристики СТР, показатели надежности СТР и акустическая обстановка в отсеках.
3. ПРЕДЛОЖЕНИЯ ПО СОВЕРШЕНСТВОВАНИЮ АГРЕГАТОВ СТР
Учитывая отмеченное выше значение совершенства технических характеристик электромеханических агрегатов СТР рассмотрим подробнее их современное состояние и попытаемся предложить пути их дальнейшего совершенствования для использования в КА при дальних перелетах. Важнейшие требования к агрегатам, вытекающие из последнего условия:
o длительное время безотказной работы (ресурс) агрегатов;
o низкий уровень создаваемых агрегатами шумов.
Рассмотрим отдельно каждый тип агрегатов СТР.
3.1. Электронасосные агрегаты
ЭНА являются основными агрегатами, обеспечивающими циркуляцию теплоносителей по контурам СТР.
Схема первого ЭНА, разработанного в конце 50-х годов для СТР спутника связи «Молния», показана на рис. 3 [7]. ЭНА состоял из шестеренного насоса 3, приводного коллекторного электродвигателя постоянного тока 1 с магнитной муфтой 6, отделяющей щеточно-коллекторный узел от теплоносителя, и понижающего редуктора 2. Конструкция ЭНА соответствовала уровню техники того времени и имела очевидные недостатки:
o сложность изготовления шестеренного насоса с торцевыми зазорами до 0,04 мм;
o низкий ресурс из-за контактного износа шестерен и подшипниковых опор;
o ЭД с малыми КПД и ресурсом из-за наличия щеточно-коллекторного узла;
o наличие магнитной муфты и редуктора.
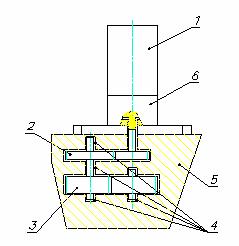
Рис. 3. Схема электронасосного агрегата шестеренного типа
В 1960 г. в НПП ВНИИЭМ был разработан бесконтактный электродвигатель постоянного тока (БДПТ) с электронным блоком-коммутатором вместо щеточно-коллекторного узла [7]. Эта электрическая машина постоянного тока, показанная на рис. 4, имеет постоянные магниты на роторе 2, а обмотку на статоре 3.
Введение в зазор между статором и ротором БДПТ тонкостенной разделительной гильзы 4 позволило избавиться от магнитной муфты, так как отделение обмотки статора от теплоносителя и отсутствие на роторе щеточно-коллекторного узла и обмоток позволило эксплуатировать ротор с опорами в среде теплоносителя.
Увеличение частоты вращения ротора до 4000-6000 об/мин позволило применить вместо шестеренного центробежный насос 1. Сочетание в ЭНА центробежного насоса с БДПТ позволило снизить массу агрегата в 2 раза по сравнению с объемными насосами, увеличить ресурс ЭНА на порядок, снизить трудоемкость изготовления, обеспечить лучшие энергетические показатели (КПД).
Однако работа шарикоподшипников 5 в среде теплоносителей, обладающих низкими смазывающими свойствами, происходит по существу в режиме масляного голодания, в связи с чем добиваться дальнейшего увеличения их ресурса в таких условиях было бесперспективным. В течение многих лет вопрос решался применением холодного резерва, т.е. установкой на борту КА групп ЭНА, последовательно включавшихся по мере отказа предшествующих.
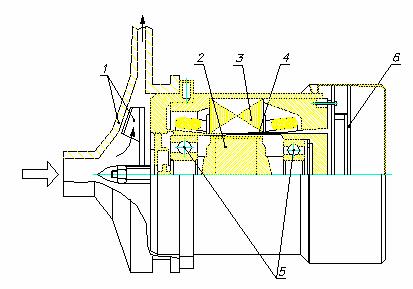
Рис. 4. Электронасосный агрегат на подшипниках качения
Проблему дальнейшего радикального повышения ресурса ЭНА можно решить только путем применения бесконтактных опор: гидродинамических, гидростатических или магнитных.
В конце 90-х годов при создании Международной космической станции (МКС) в РКК «Энергия» при участии НПП ВНИИЭМ был разработан ЭНА с бесконтактными опорами, показанный на рис. 5 [6, 7]. ЭНА формируется двумя симметричными центробежными насосами 1, 2, расположенными на противоположных концах вала электродвигателя, что позволяет уравновесить осевые силы, создаваемые колесами насоса. Для компенсации разброса осевых сил двух насосов, вызванного погрешностями их изготовления, в конструкции предусмотрены осевые магнитные подшипники 3. При вращении ротора 7 часть расхода (»5%) каждого насоса через фильтр тонкой очистки 8 направляется для питания радиальных гидростатических опор 4 электродвигателя с напором, развиваемым насосом, что обеспечивает всплытие ротора и его бесконтактное вращение.

Рис. 5. Схема ЭНА с бесконтактным электродвигателем постоянного тока на гидростатических опорах
1 – корпус насосса; 2 – рабочее колесо насоса; 3 – осевой магнитный подшипник;
4 – гидростатический подшипник; 5 – корпус электродвигателя; 6 – статор электродвигателя;
7 – ротор электродвигателя; 8 - фильтр
Ресурс ЭНА - не менее 100 тысяч часов, что делает именно такой тип ЭНА перспективным для использования в СТР КА для дальних межпланетных перелетов. В настоящее время существует единственный типоразмер такого ЭНА с электродвигателем мощностью 90 Вт и частотой вращения 6000 об/мин. При проектировании СТР конкретного КА ЭНА должны быть оптимизированы по требуемым параметрам, что обеспечит их минимальную массу и энергопотребление.
Существенным достоинством рассмотренного ЭНА для длительного полета является бесшумного его работы. Известно, что источником шума в ЭНА являются подшипники качения, при этом в процессе их износа формируемый шум увеличивается.
Таким образом, предлагаемый тип ЭНА обеспечит длительную и бесшумную работу СТР.
3.2. Регулятор расхода жидкости
РРЖ фактически осуществляет управление температурным режимом, изменяя количество холодной жидкости, протекающей через жидкостный теплообменник и отбирающей тепло из внутреннего контура отсека, по командам СУ СОТР.
Типовая схема используемого в настоящее время
наружного контура (контура охлаждения) показана на рис. 6а. Весь объем
теплоносителя ЭНА прокачивает через радиатор-излучатель. Распределение общего
расхода ![]() между
теплообменником
между
теплообменником ![]() и
перепускной гидролинией
и
перепускной гидролинией ![]() осуществляется в РРЖ изменением
площади соответствующих проходных сечений
осуществляется в РРЖ изменением
площади соответствующих проходных сечений ![]() и
и ![]() путем перемещения разделяющей заслонки
с сохранением суммарной площади
путем перемещения разделяющей заслонки
с сохранением суммарной площади ![]() . Перемещение заслонки может
осуществляться, например, при помощи шагового электродвигателя. Тогда весь
диапазон управления разбит на N дискретных шагов.
. Перемещение заслонки может
осуществляться, например, при помощи шагового электродвигателя. Тогда весь
диапазон управления разбит на N дискретных шагов.
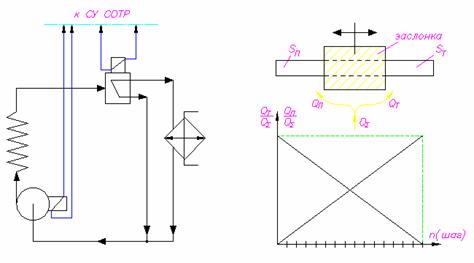
Рис. 6а. Управление температурой с помощью шагового РРЖ
Недостатки такой схемы:
1) ЭНА постоянно качает полный расход: если тепловыделение в отсеке мало, то практически весь расход идет по перепускной гидролинии, не производя полезного действия, однако ЭНА потребляет постоянное значение энергии и расходует располагаемый ресурс.
2) шаг заслонки не может быть слишком малым, а при
достаточно крупном шаге может реализовываться автоколебательный режим работы
регулятора, если точное положение заслонки для реализации заданной температуры ![]() находится между
двумя последовательными дискретными положениями. При автоколебаниях быстро
расходуется располагаемый ресурс и происходит отказ РРЖ.
находится между
двумя последовательными дискретными положениями. При автоколебаниях быстро
расходуется располагаемый ресурс и происходит отказ РРЖ.
Для преодоления отмеченных недостатков предлагается схема с насосным регулированием, показанная на рис. 6б.

Рис. 6б. Управление температурой с помощью насосного РРЖ
Из схемы исключен электромеханический РРЖ. Циркуляцию теплоносителя через радиатор и через теплообменник обеспечивают два независимых насоса ЭНАР и ЭНАТ для обеспечения повышенного ресурса и малошумности выполненные с учетом рекомендаций п.3.1. Современные бесконтактные электродвигатели допускают глубокое регулирование частоты вращения ротора за счет напряжения питания. А объемный расход центробежного насоса при работе на одну и ту же нагрузку практически линейно зависит от частоты вращения вала. Таким образом, регулируя напряжения питания Uр и Uт можно изменять расходы теплоносителя Qр и Qт, реализуя требуемые алгоритмы управления температурой в отсеке. Например, в ночном режиме, когда тепловыделения и космонавтов и приборов минимальные насосы могут быть переведены на пониженные обороты, обеспечивая низкое энергопотребление и экономию ресурса. Особая форма каналов смесительной камеры, показанная на рис. 6б, позволяет направлять в теплообменник преимущественно теплоноситель, охлажденный в радиаторе.
3.3. Вентиляторы
В составе СТР КА используются как осевые, так и центробежные вентиляторы. Достигнутые в настоящее время значения ресурса вентиляторов позволяют использовать их для дальних космических перелетов. Однако именно работа вентиляторов определяет общую шумовую обстановку в обитаемых отсеках КА. Можно выделить два основных источника шума в вентиляторах:
1) шум шарикоподшипников, увеличивающийся в процессе их износа;
2) воздушный шум от срывающихся с лопастей рабочего
колеса вихревых потоков. Интенсивность производимого шума существенно зависит
от окружной скорости лопастей, т.е. от частоты вращения ротора, а преобладающая
частота шума пропорциональна частоте вращения ротора, помноженной на число
лопастей рабочего колеса. Так при числе лопастей Z=5 и частоте
вращения ротора n =
3000 об/мин = 50 об/с. Тогда частота генерируемого звука составит ![]() Гц и будет
находиться в области высокой чувствительности человеческого уха. Существуют
способы понижения интенсивности акустического шума (снижение частоты вращения с
переходом к двухступенчатым схемам, совершенствование профиля лопастей,
применение пассивных глушителей и матов и т.д.), однако они не решают полностью
проблему шума.
Гц и будет
находиться в области высокой чувствительности человеческого уха. Существуют
способы понижения интенсивности акустического шума (снижение частоты вращения с
переходом к двухступенчатым схемам, совершенствование профиля лопастей,
применение пассивных глушителей и матов и т.д.), однако они не решают полностью
проблему шума.
Для радикального снижения шума вентиляторов предлагается существенно увеличить частоту вращения ротора электродвигателя и применить бесконтактные, в данном случае газодинамические подшипники.
Так как человеческое ухо не слышит звук с частотой
выше 20000 Гц, то при Z = 8
и n³15000 об/мин = 250 об/с воздушный шум вентилятора с
частотой ![]() Гц
не будет восприниматься космонавтами. Увеличение частоты вращения позволит
уменьшить радиальные размеры колеса вентилятора. Кроме того, высокооборотный
двигатель при одной и той же мощности имеет существенно меньшие габариты и
массу, чем низкооборотный. Таким образом, габариты и масса высокооборотного
вентилятора в целом существенно уменьшатся по сравнению с используемыми в
настоящее время.
Гц
не будет восприниматься космонавтами. Увеличение частоты вращения позволит
уменьшить радиальные размеры колеса вентилятора. Кроме того, высокооборотный
двигатель при одной и той же мощности имеет существенно меньшие габариты и
массу, чем низкооборотный. Таким образом, габариты и масса высокооборотного
вентилятора в целом существенно уменьшатся по сравнению с используемыми в
настоящее время.
Переход на повышенные обороты ротора и уменьшение его массы позволит так же использовать в качестве опор газодинамические подшипники, которые применяются при аналогичных оборотах в гироскопической технике [8]. Схема предлагаемого вентилятора показана на рис. 7.

Рис. 7. Высокооборотный вентилятор на газодинамических подшипниках
1 – электродвигатель; 2 – крыльчатка; 3 – подшипник; 4 – шип; 5 – пилоны;
6 – спрямляющий аппарат
Газодинамическая опора состоит из подшипника и шипа, выполненного в виде полусферы, на поверхности которой вытравлены узкие профилированные (спиральные) канавки. При высокой частоте вращения воздух по канавкам увлекается в зазор между шипом и подшипником. В результате сжатия в смазочном слое возникает повышенное давление, которое и поднимает ротор электродвигателя, делая его дальнейшее вращение бесконтактным.
Ресурс вентиляторов на газодинамических подшипниках составит не менее 100000 часов.
Недостатком вентиляторов с газодинамическими опорами по сравнению с шарикоподшипниковыми опорами является существенно большая сложность изготовления высокоточных деталей опор и, соответственно, высокая стоимость. Однако, учитывая уникальность межпланетных проектов, повышенная стоимость при достижении новых качеств вентиляторов является оправданной.
ВЫВОДЫ
Выполненный в настоящей работе обзор научно-технической литературы по системам терморегулирования КА и анализ существующих и возможных схем и вариантов конструкции исполнительных органов систем управления температурными режимами (электронасосных агрегатов, регуляторов расхода жидкости, вентиляторов) позволяет сделать следующие выводы:
1. Используемые в настоящее время в системах СТР ЭНА, РРЖ и вентиляторы не в полной мере удовлетворяют условиям длительного автономного космического полета: имеют ограниченный ресурс и неудовлетворительные акустические характеристики, ухудшающиеся по мере выработки ресурса.
2. Предложенные в работе изменения, как то:
1) полный перевод ЭНА на гидростатические и магнитные подшипники;
2) переход от электромеханического РРЖ к насосному;
3) переход от низкооборотных вентиляторов на
подшипниках качения к высокооборотным (![]() об/мин) вентиляторам на
газодинамических подшипниках позволит обеспечить СТР длительную безотказную
работу, уменьшить тем самым необходимость в запасных агрегатах для замены
отказавших и практически снимает проблему шума в жилых отсеках КА, что является
весьма актуальным при осуществлении дальнего космического перелета.
об/мин) вентиляторам на
газодинамических подшипниках позволит обеспечить СТР длительную безотказную
работу, уменьшить тем самым необходимость в запасных агрегатах для замены
отказавших и практически снимает проблему шума в жилых отсеках КА, что является
весьма актуальным при осуществлении дальнего космического перелета.
Список литературы
1. Левантовский В.И. Полеты к Марсу. Глава 15 в книге «Механика космического полета в элементарном изложении». - М.: Наука, 1974.
2. Российские планы Марсианской экспедиции. - Новости космонавтики. - №10, 2002.
3. Серебряков В.Н. Основы проектирования систем жизнеобеспечения экипажа космических летательных аппаратов. - М.: Машиностроение, 1983.
4. Малоземов В.В. Тепловой режим космических аппаратов. - М.: Машиностроение, 1980.
5. Малоземов В.В., Кудрявцева Н.С. Системы терморегулирования космических аппаратов. - М.: Машиностроение, 1995.
6. Электронасосные агрегаты космических аппаратов с гидроопорами ротора. / В.Н.Кузьмин, Е.М.Михайлов, С.А.Стома // Электротехника. - №5. - 1996.
7. Бесконтактные электродвигатели постоянного тока в электронасосных агрегатах космических аппаратов. / С.А.Стома, В.В.Кудрявцев, В.Н.Кузьмин, Е.М.Михайлов // Электротехника. - №6. - 1996.
8. Гироскопические системы: элементы гироскопических приборов. / Под ред. Д.С.Пельпора. - М.: Высшая школа, 1988.
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||