научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 01, январь 2013
DOI: 10.7463/0113.0500331
УДК 681.5.01
Россия, МГТУ им. Н.Э. Баумана
Россия, ОАО «РСК «МиГ»
dimacheglakov@mail.ru
Введение
Целью исследования является разработка специального режима КСУ (комплексной системы управления) самолетом, обеспечивающего приемлемые характеристики управляемости летательного аппарата (ЛА) при дозаправке топливом в воздухе.
Обзор предшествующих работ, посвященных дозаправке топливом в воздухе маневренных летательных аппаратов [1], позволяет выделить несколько направлений исследований:
- Исследования в области аэродинамического взаимовлияния танкера, заправочного шланга и конуса, заправляемого самолета, уточнение математических моделей.
- Разработкам систем измерения взаимного положения танкера, заправочного шланга и конуса, заправляемого самолета.
- Разработка алгоритмов ручного и автоматического управления самолетом.
- Проведения летных испытаний.
Данная работа включает в себя исследование аэродинамических особенностей, разработку специализированного алгоритма ручного управления самолетом и проведение летных испытаний. Определим отличие ручного режима управления самолетом от автоматического [2]:
- В режиме ручного управления ЛА КСУ отрабатывает команды, которые задает летчик, используя ручку управления самолетом (РУС), педали, ручку управления двигателем (РУД).
- В режиме автоматического управления КСУ обеспечивает полет по заданной летчиком траектории. При этом летчик исключен из контура управления короткопериодическим движением самолета [2].
Проанализировав предшествующие работы в области разработки систем управления ЛА при дозаправке топливом в воздухе [1], можно выделить некоторые особенности данного исследования, составляющие его научную новизну:
- Синтез законов управления КСУ проводился с учетом аэродинамического влияния конуса дозаправки на флюгерный датчик угла атаки [3, 4].
- В КСУ был реализован принцип управления длиннопериодическим движением с помощью РУС, и полное разделение движения по углам крена и рысканью в ручном режиме управления самолетом [2].

Рис. 1. Дозаправка «Торнадо» GR.4 от танкера VC10
1. Постановка задачи
Дозаправка топливом в воздухе - один из самых напряженных с точки зрения нагрузки на летчика режим пилотирования самолета. В данной статье рассматривается принятый в России метод дозаправки топливом в воздухе штанга-конус (рис. 1) [1]. В этом режиме летчик должен обеспечивать перемещения самолета с точностью в десятки сантиметров, чтобы обеспечить успешную стыковку штанги с конусом дозаправки. Для успешной стыковки необходимо обеспечить попадание штангой дозаправки в центр конуса с ошибкой не более 0.3 м, выдерживая относительную скорость в пределах от 1.2 до 2.5 м/с. Управление самолетом в условиях таких ограничений на параметры полета называется режимом точного пилотирования.
2. Результаты исследования
Целый ряд негативных факторов и возмущений, вызванных спутным следом (вихревым полем) самолета-заправщика (рис. 2), действуют на заправляемый самолет при приближении к танкеру [1]: боковая сила, направленная в сторону танкера; возмущающий момент по крену; дополнительные турбулентность и ветровая составляющая. К этим факторам следует прибавить движение конуса, которое обычно носит гармонический характер, с доминирующей первой гармоникой [1]. Все эти внешние воздействия усложняют точное пилотирование самолета, поэтому целесообразно переключить КСУ в специальный режим. В этом режиме КСУ должна обеспечивать стабилизацию и изменение вертикальной скорости (![]() ) и скорости изменения курса по командам РУС, обеспечивая управление длиннопериодическим движением в ручном режиме [2, 3]. Режимы полета, на которых выполняется дозаправка топливом в воздухе характеризуется малыми балансировочными углами атаки и тангажа (до 7 °) и малыми отклонениями параметров движения от балансировочных [4 - 6]. Поэтому верны следующие формулы [2, 3]:
) и скорости изменения курса по командам РУС, обеспечивая управление длиннопериодическим движением в ручном режиме [2, 3]. Режимы полета, на которых выполняется дозаправка топливом в воздухе характеризуется малыми балансировочными углами атаки и тангажа (до 7 °) и малыми отклонениями параметров движения от балансировочных [4 - 6]. Поэтому верны следующие формулы [2, 3]:
 (1)
(1)
 (2)
(2)
 (3)
(3)
где ![]() - угол крена, º;
- угол крена, º; ![]() - курс, º;
- курс, º; ![]() - угол тангажа, º;
- угол тангажа, º; ![]() - вертикальная скорость, м/с; Н – высота, м;
- вертикальная скорость, м/с; Н – высота, м; ![]() ,
, ![]() - угловые скорости вращения, º/с;
- угловые скорости вращения, º/с; ![]() - угол наклона траектории, º;
- угол наклона траектории, º; ![]() - скорость самолета, м/с.
- скорость самолета, м/с.
Из формул (1) и (3) следует, что вертикальная скорость и скорость изменения курса пропорциональны углам тангажа и крена самолета. Так как угол крена и тангажа измеряются точнее и с меньшими запаздываниями, чем вертикальная скорость и скорость изменения курса, то целесообразно обеспечить изменение текущих углов крена и тангажа самолета по командам от ручки управления, задаваемым летчиком. Это обеспечит непосредственное ручное управление длиннопериодическим движением и снизит влияние спутного следа танкера на особенности пилотирования.
Первоначально при разработке законов управления в режиме ДЗ для КСУ самолета были использованы алгоритмы управления со статической обратной связью по углу крена и тангажа, аналогичные применявшимся для самолетов с механической проводкой управления [2]. После этого были проведены летные испытания с применением самолета заправщика Ил-78. В результате были выявлены следующие особенности режима: необходимость дополнительного триммирования ручки управления самолетом (РУС) по крену из-за влияния спутного следа (так как статическая обратная связь не компенсировала полностью возмущающий момент); влияние потока обтекающего конус на датчик угла атаки (появление статической ошибки в измерении датчиком текущего угла атаки), влияние воздушного потока, обтекающего носовую часть самолета, на положение конуса дозаправки (влияние увеличивается с ростом относительной скорости сближения самолета и конуса).

Рис. 2. Картина вихревого поля крыла и хвостового оперения танкера
По результатам летных испытаний в КСУ были реализованы ряд доработок:
- Для компенсации влияния спутного следа в боковом канале управления был использован пропорцонально-интегральный закон управления по сигналу угла крена (см. рис. 3) [4 - 6]. Это позволило получить автоматическую компенсацию ветровых возмущений, момента по крену от несимметричных подвесок, спутного следа от танкера, а также обеспечить позиционное управление по крену в диапазоне ±35º, развязанное управление по крену и углу рысканья, непосредственное управление длиннопериодическим движением самолета по сигналам от РУС.
- В продольном канале доработки включали исключение влияния статической ошибки по углу атаки и ряд изменений в корректорах сигналов обратной связи [4 - 6].
Для проверки новых алгоритмов в ходе математического и полунатурного моделирования исходная математическая модель аэродинамики самолета, полученная на основе данных исследований в аэродинамических трубах, была доработана с учетом результатов летных испытаний [6].
Результаты, моделирования и летных испытаний полностью подтвердили отличные характеристики алгоритма. Однако наличие интегрального звена в схеме алгоритма предъявляет требования дополнительные к контролю сигнала обратной связи (в данном случае – углу крена). В случае сбоя в работе инерциальной системы навигации значение угла крена может измениться скачкообразно и вызвать вращение самолета. Поэтому необходимо ограничить значение угла крена (рис. 3) максимальным (γmax) и минимальным (γmin) значениями. Для расчета γmax и γmin и определения отказа инерциальной навигационной системы предлагается схема контроля (рис. 4). Основная идея схемы контроля состоит в сравнении текущего значения угла крена со значением, получаемым из модели.

Рис. 3. Структурная схема алгоритма управления
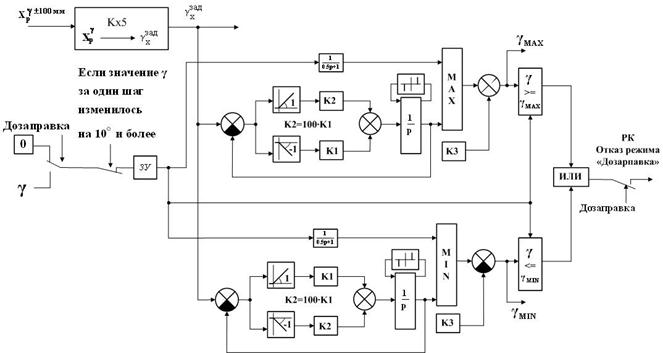
Рис. 4. Схема контроля сигнала угла крена
Заключение
Основным результатом работы является специальный режим работы КСУ для ручного управления в процессе дозаправки топливом в воздухе. Этот режим прошел полный цикл испытаний и используется на серийных самолетах. В дополнение к этому были получены углубленные знания о динамике движения самолета вблизи танкера, создана методическая основа для дальнейших исследований и разработки автоматического управления ЛА в этом режиме.
Список литературы
1. Чеглаков Д.И. История исследований в области автоматизации процесса дозаправки топливом в воздухе летательных аппаратов // Новый Университет. Сер. Технические науки. 2011. № 4. C. 34-47.
2. Оболенский Ю.Г. Управление полетом маневренных самолетов. М.: Воениздат, 2007. 480 с.
3. Бюшгенс Г.С., Студнев Р.В. Динамика самолета. Пространственное движение. М.: Машиностроение, 1983. 320 с.
4. Орлов С.В., Чеглаков Д.И. Алгоритм комплексной системы управления самолета МиГ-29К/КУБ в режиме дозаправка топливом в воздухе // Сборник аннотаций работ форума «Молодежь и будущее авиации и космонавтики». 2010. C. 62.
5. Орлов С.В., Чеглаков Д.И. Разработка алгоритма КСУ-941(941УБ) в режиме «Дозаправка» // Сборник работ 1-ой научно-практической конференции «Инновации в Авиастроении». 2010. С. 130-142.
6. Орлов С.В., Чеглаков Д.И. Алгоритм комплексной системы управления самолета МиГ-29К/КУБ в режиме дозаправка топливом в полете // Труды МАИ (электронный журнал). 2011. № 45. Режим доступа: http://www.mai.ru/science/trudy/published.php?ID=25528 (дата обращения 13.12.2012).
Публикации с ключевыми словами: комплексная система управления, летательный аппарат, дозаправка топливом в воздухе
Публикации со словами: комплексная система управления, летательный аппарат, дозаправка топливом в воздухе
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||