научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 12, декабрь 2012
DOI: 10.7463/1212.0496837
УДК 621.396.2
Россия, МГТУ им. Н.Э. Баумана
marco.tulio.teran@gmail.com
artyom83@mail.ru
Особенности радионавигационного сигнала
Для решения задачи навигационно-временного определения (НВО), а также планирования сеансов навигации требуется правильное измерение радионавигационных параметров (РНП) радионавигационного сигнала (РНС) и корректное декодирование навигационного сообщения [2, 3, 8]. В ГНСС используются РНС, в которых для расширения спектра (с целью обеспечения требования к точности измерений РНП) используется манипуляция фазы сигнала символами бинарной кодовой последовательности [1, 3, 8].
В приемном тракте аппаратуры потребителей (АП) полученный РНС является сигналом со случайной фазой на фоне белого гауссовского шума (БГШ) [1, 2, 4].
На выходе радиочастотного тракта АП РНС описывается следующим образом
здесь ![]() – вектор РНП сигнала; где
– вектор РНП сигнала; где ![]() – задержка РНС;
– задержка РНС; ![]() – частота доплеровского сдвига;
– частота доплеровского сдвига; ![]() – выходная частота радиосигнала на промежуточной частоте АП;
– выходная частота радиосигнала на промежуточной частоте АП; ![]() – амплитуда сигнала;
– амплитуда сигнала; ![]() – функция амплитудной модуляции дальномерным кодом;
– функция амплитудной модуляции дальномерным кодом; ![]() – функция амплитудной модуляции навигационным сообщением;
– функция амплитудной модуляции навигационным сообщением; ![]() – БГШ с нулевым математическим ожиданием и корреляционной функцией
– БГШ с нулевым математическим ожиданием и корреляционной функцией
 ,
,
где ![]() – Дельта-функция;
– Дельта-функция; ![]() – двухсторонняя спектральная плотность мощности шума.
– двухсторонняя спектральная плотность мощности шума.
Выделение навигационного сообщения
В приемном тракте для демодуляции навигационной информации (НИ) может использоваться фазовый детектор (ФД), который, как правило, реализуется на основе квадратурно-корреляционной обработки ![]() в режиме слежения за фазой и задержкой РНС [3, 8].
в режиме слежения за фазой и задержкой РНС [3, 8].
Процедура выделения навигационного сообщения ![]() выполняется путем корреляции выше приведенного сигнала с опорной комплексной копией РНС
выполняется путем корреляции выше приведенного сигнала с опорной комплексной копией РНС ![]() [1, 7, 10].
[1, 7, 10].
Опорный РНС , формирующийся в АП имеет вид
где ![]() – вектор оценок РНП сигнала в следящей системе;
– вектор оценок РНП сигнала в следящей системе; ![]() – оценка сдвига дальномерного кода;
– оценка сдвига дальномерного кода; ![]() – оценки доплеровского сдвига и начальной фазы частоты принятого РНС.
– оценки доплеровского сдвига и начальной фазы частоты принятого РНС.
Таким образом, выражение на выходе коррелятора ![]() можно представить в виде
можно представить в виде
где ![]() – число отчетов (реализации) на выходе системы слежения;
– число отчетов (реализации) на выходе системы слежения; ![]() – интервал накопления РНС, как правило, равен длительности периода дальномерного кода.
– интервал накопления РНС, как правило, равен длительности периода дальномерного кода.
Алгоритм выделения НИ сводится к определению отсчетов на выходе одного из квадратурных корреляторов (синфазной составляющей) [2, 3], т.е. действительная часть соотношения

где ![]() – ошибка системы слежения за частотой;
– ошибка системы слежения за частотой; ![]() – ошибка системы слежения за фазой.
– ошибка системы слежения за фазой.
В выражении , произведение ![]() является быстро меняющейся функцией по сравнению с функцией
является быстро меняющейся функцией по сравнению с функцией ![]() , это позволяет записать данное выражение в следующем виде [4, 7, 9]
, это позволяет записать данное выражение в следующем виде [4, 7, 9]

где корреляционная функция между принимаемым и опорным дальномерным кодом  зависит от значения
зависит от значения ![]() – ошибка слежения за задержкой. Здесь
– ошибка слежения за задержкой. Здесь ![]() – текущее значение символа навигационного сообщения в данном k-ом интервале корреляции.
– текущее значение символа навигационного сообщения в данном k-ом интервале корреляции.
Выполняя интегрирование , получим

Удобно представить выражение в виде зависимости от ошибок слежения и от информационного параметра ![]() , который может принимать положительное или отрицательное значение. Значения случайного параметра
, который может принимать положительное или отрицательное значение. Значения случайного параметра ![]() полагаются равновероятными
полагаются равновероятными
![]() ,
,
здесь  .
.
Так как шум ![]() на выходе коррелятора является БГШ, то его дисперсия постоянна [1, 7, 9]
на выходе коррелятора является БГШ, то его дисперсия постоянна [1, 7, 9]
 ,
,
где ![]() – автокорреляционная функция дальномерного кода.
– автокорреляционная функция дальномерного кода.
На рисунке 1 представлена синфазная составляющая на выходе коррелятора, результат выполнения операции слежения за сигналом одного из спутников цифровой записи реализации РНС ГЛОНАСС. В данном интервале последовательность навигационного сообщения является аддитивной смесью полезных символов НИ с БГШ, в этом случае наложенный шум мало искажает полезный сигнал. На рисунке 2 представлен ее спектр, который не содержит информации о синхронизации.
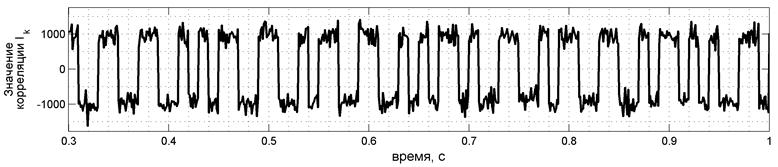
Рис. 1. Выход синфазной составляющей реализации слежения за сигналом РНС ГЛОНАСС.

Рис. 2. Спектр выхода синфазной составляющей реализации слежения за сигналом РНС ГЛОНАСС.
На рисунке 3 представлены отсчеты синфазной составляющей реализации слежения за сигналом РНС ГЛОНАСС в виде гистограммы. При построении гистограмм предполагается, что отсчеты синфазной составляющей распределены по гауссовскому закону.
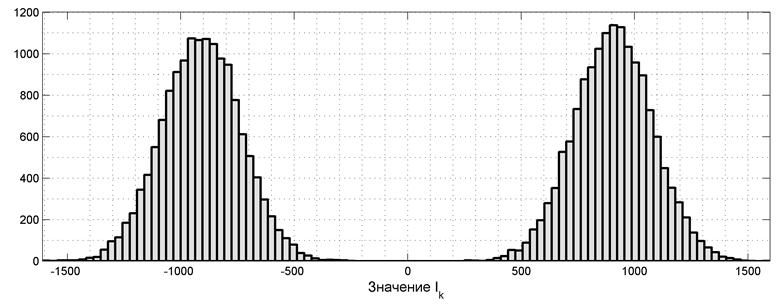
Рис. 3. Распределения выхода синфазной составляющей реализации слежения за сигналом РНС ГЛОНАСС.
Алгоритм синхронизации навигационного сообщения
Основной задачей данной работы является установление методики синхронизации навигационного сообщения с наименьшей ошибкой восстановления символов НИ, использующей быстрые алгоритмы доступа к полезным символам НИ, обеспечивающие наименьшие вычислительные затраты и минимизации затрат памяти на решение задач.
Структура формирования НИ позволяет осуществить тактовую синхронизацию (по границам бит информационных символов), также, цикловую синхронизацию (по границам кодовых слов НИ). Для упрощения задачи синхронизации навигационное сообщение складывается по модулю 2 с символами меандра тактовой синхронизации, следующими с частотой ![]() [2, 5, 6].
[2, 5, 6].
В первую очередь предлагается синхронизация по границам бит информационных символов навигационного сообщения путем обнаружения смены полярности между двумя соседними навигационными символами в последовательности, для того чтобы затем с учетом того признака смены знака формировать синхроимпульсы с частотой тактовой синхронизации ![]() . В процессе обнаружения изменения знака достаточно использовать для поиска отрезок навигационного сообщения длительностью
. В процессе обнаружения изменения знака достаточно использовать для поиска отрезок навигационного сообщения длительностью ![]() , на котором осуществляется хотя бы одно изменение полярности между двумя соседними символами с учетом характеристик синхронизации навигационного сообщения меандром тактовой синхронизации [3, 5, 6].
, на котором осуществляется хотя бы одно изменение полярности между двумя соседними символами с учетом характеристик синхронизации навигационного сообщения меандром тактовой синхронизации [3, 5, 6].
Исходя из сказанного выше, в интервале ![]() последовательность навигационного сообщения является аддитивной смесью
последовательность навигационного сообщения является аддитивной смесью ![]() полезных символов с неизвестной случайной задержкой
полезных символов с неизвестной случайной задержкой ![]() и БГШ
и БГШ ![]() с нулевым математическим ожиданием и дисперсией
с нулевым математическим ожиданием и дисперсией ![]() , формируемой на выходе схемы слежения за сигналом, где
, формируемой на выходе схемы слежения за сигналом, где  – число отчетов входной реализации
– число отчетов входной реализации ![]() на интервале
на интервале ![]() [3, 7].
[3, 7].
На рисунке 4.а представлены отсчеты математической модели синфазной составляющей выхода коррелятора системы слежения за сигналом ГНСС ГЛОНАСС длительностью ![]() при наличий шума. Видно, что на данном интервале осуществляется как минимум одно изменение полярности.
при наличий шума. Видно, что на данном интервале осуществляется как минимум одно изменение полярности.
Ключевым моментом в построении цифровой системы тактовой синхронизации является синтез детектора смены знака [2, 3]. Для того чтобы найти момент смены полярности, необходимо по принятой реализации ![]() получить оценку последовательности синхронизации
получить оценку последовательности синхронизации ![]() . В данном случае
. В данном случае ![]() является потоком симметричного цифрового видеоимпульса, состоящим из
является потоком симметричного цифрового видеоимпульса, состоящим из ![]() дискретных значений, меняющих знак, как показано на рисунке (рис. 4.б).
дискретных значений, меняющих знак, как показано на рисунке (рис. 4.б).

Рис. 4. Отсчеты а) с выхода синфазной составляющей коррелятора длительностю ![]() ; б) с формирователя видеоимпульса синхронизации.
; б) с формирователя видеоимпульса синхронизации.
Отметим, что оценка изменения знака, т.е. переход между двумя информационными символами, соответствует оценке истинных значений этих символов в условиях априорной неопределенности. Задача оценки изменения знака решается с позиций теории оптимального обнаружения [1, 4].
В процессе оптимального обнаружения отыскивается символьная последовательность ![]() , для которой смесь сигнала с шумом наиболее близка к
, для которой смесь сигнала с шумом наиболее близка к ![]() .
.
В соответствии с формулой Байеса [1, 4, 9] функцию правдоподобия ![]() удобно представить следующим образом
удобно представить следующим образом

Оптимальный обнаружитель максимизирует апостериорную вероятность ![]() для всех возможных комбинаций
для всех возможных комбинаций ![]() последовательностей
последовательностей ![]() в интервале
в интервале ![]() . Плотность вероятности
. Плотность вероятности ![]() не зависит от принятой последовательности
не зависит от принятой последовательности ![]() , как правило, максимизация
, как правило, максимизация ![]() тоже; это условие соответствует критерию максимума апостериорной вероятности [9].
тоже; это условие соответствует критерию максимума апостериорной вероятности [9].
Оптимальная оценка ![]() максимизирует функцию правдоподобия
максимизирует функцию правдоподобия ![]() . Алгоритм оценки по критерию максимума априорной вероятности можно записать как
. Алгоритм оценки по критерию максимума априорной вероятности можно записать как
Логарифмическая целевая функция, реализующая алгоритм оценки с учетом наличий шума имеет вид дискретной свертки входной реализации ![]() с импульсной характеристикой оптимального обнаружителя [4, 9].
с импульсной характеристикой оптимального обнаружителя [4, 9].
Вариант аппроксимации целевой функции описывается в виде

где  .
.
Вторая методика синхронизации основана на обнаружении заднего фронта одного слова с помощью специальной псевдослучайной последовательности метки времени (ПСПМВ) [2, 3, 8], затем, после обнаружения фронта слова, границы навигационных символов зафиксируются с данной частотой ![]() ., т.е. после данного заднего фронта могут быть определены границы бит информационных символов навигационного сообщения.
., т.е. после данного заднего фронта могут быть определены границы бит информационных символов навигационного сообщения.
Результаты свертки последовательности значений ![]() и опорной ПСПМВ на корреляторе являются импульсами (рис. 5) синхронными с задним фронтом определенного символа ПСПМВ.
и опорной ПСПМВ на корреляторе являются импульсами (рис. 5) синхронными с задним фронтом определенного символа ПСПМВ.
После обнаружения заднего фронта ПСПМВ остальные кодовые слова могут быть найдены, так как они расположены на равном расстоянии друг от друга (цикловая синхронизация).

Рис. 5. Значение корреляционной функции значений ![]() и опорной ПСПМВ.
и опорной ПСПМВ.
На рисунке 5 представлены результаты корреляции между навигационными данными и ПСПМВ. Корреляционные пики указывают местоположение начала кодового строка.
Восстановление навигационного символа
Из-за воздействий помех и нестабильности параметров опорных генераторов АП в процессе слежения последовательность навигационного сообщения подвергается искажению. Основной задачей является восстановление амплитуды, т.е. принятие оценок навигационного символа на данных определенных временных интервалах [2, 3].
Обработка оценок навигационных символов становится возможной при формировании временных интервалов путем синхронизации. Как правило, все отсчеты в пределах участков тактового интервала накапливаются, и затем результат суммирования поступает в решающее устройство (РУ) [3, 4, 10]. РУ сравнивает значение на выходе накопителя с пороговым уровнем (ПУ) ![]() . Если результат суммирования превышает ПУ, то формируется
. Если результат суммирования превышает ПУ, то формируется ![]() , в противном случае получаем
, в противном случае получаем ![]() . Отсюда получаем следующее правило различения
. Отсюда получаем следующее правило различения
где ![]() – число отчетов внутри временного интервала синхронизации.
– число отчетов внутри временного интервала синхронизации.
Кроме того, чтобы гарантировать верность принятия решения РУ, принятые отчеты должны иметь минимальные искажения. Оптимальное решение этой задачи реализуется на основе оптимальной фильтрации [1, 3, 4].
Демодуляция ОФМ, проверка достоверности и декодирования НИ
Чтобы выделять истинные символы навигационного сообщения, необходимо извлекать символы меандровой последовательности тактовой синхронизации из принятых отчетов [2, 3, 8].
Отметим, что в АП ГНСС ГЛОНАСС поступает сигнал с относительной фазовой манипуляцией (ОФМ), исключающий явление обратной работы ФД [2, 3, 5], в том числе возникающей из-за неправильного складывания меандра тактовой синхронизации при демодуляции. Оптимальная обработка выделения НИ с ОФМ реализует устройство, приведенное на рисунке 6, где УЗ – устройство задержки.
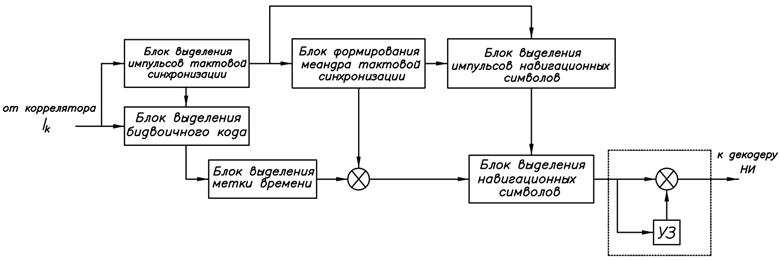
Рис. 6. Схема канала выделения НИ ГНСС ГЛОНАСС.
Нельзя избежать от возникновения ошибок оценки символов НИ, при этом необходимо применять процедуры проверки достоверности информации для обнаружения и исправления этих ошибок. С целью повышения достоверности приема навигационных данных используют помехоустойчивое кодирование для обнаружения и исправления ошибок на стороне АП [3, 5, 6].
Декодирования навигационного сообщения, для решения навигационной задачи и другие сервисные функции, производится в соответствии с алгоритмом декодирования, представленным в интерфейсном контрольном документе данного ГНСС [5, 6].
Анализ полученных результатов
Для оценки качества восстановления навигационного сообщения используется коэффициент ошибок ![]() [1], определяемый как отношение числа ошибочно регенерированных символов
[1], определяемый как отношение числа ошибочно регенерированных символов ![]() к общему числу символов
к общему числу символов ![]()

С помощью математической модель, реализующей процесс синхронизации и регенерации навигационного сообщения, построим графики зависимости коэффициент ошибок ![]() от отношения сигнал/шум на выходе синфазной составляющей системы слежения за РНС ГНСС ГЛОНАСС.
от отношения сигнал/шум на выходе синфазной составляющей системы слежения за РНС ГНСС ГЛОНАСС.

Рис. 7. Характеристики зависимости коэффициента ошибок ![]() от отношения сигнал/шум при длительности
от отношения сигнал/шум при длительности ![]() а)
а) ![]() , б)
, б) ![]() , в)
, в) ![]() .
.
На приведенном выше рисунке 7, характерном для осуществления синхронизации с помощью синхроимпульсов смены знака ![]() с разными значениями длительности последовательности синхронизации, представлена характеристика зависимости коэффициента ошибок
с разными значениями длительности последовательности синхронизации, представлена характеристика зависимости коэффициента ошибок ![]() от отношения сигнал/шум на выходе квадратурного коррелятора, отсюда следует, что при увеличении значения отношения мощности полезных символов к шуму коэффициент ошибок уменьшается. Отметим, что чем больше длительность последовательности синхронизации
от отношения сигнал/шум на выходе квадратурного коррелятора, отсюда следует, что при увеличении значения отношения мощности полезных символов к шуму коэффициент ошибок уменьшается. Отметим, что чем больше длительность последовательности синхронизации ![]() , тем быстрее снижается данный коэффициент. Таким образом, уменьшение отношения сигнал/шум приводит к росту ошибок восстановления навигационных символов, за счет неправильного определения смены полярности.
, тем быстрее снижается данный коэффициент. Таким образом, уменьшение отношения сигнал/шум приводит к росту ошибок восстановления навигационных символов, за счет неправильного определения смены полярности.
На следующем рисунке (рис. 8) представлена характеристика зависимости коэффициента ошибок ![]() от отношения сигнал/шум при использовании методики синхронизации навигационных символов, заключенной в изначальном поиске границы слова с помощью ПСПМВ и сравняется с результатами первого предлагаемого метода синхронизации обнаружении смены знака.
от отношения сигнал/шум при использовании методики синхронизации навигационных символов, заключенной в изначальном поиске границы слова с помощью ПСПМВ и сравняется с результатами первого предлагаемого метода синхронизации обнаружении смены знака.

Рис. 8. Характеристики зависимости коэффициента ошибок ![]() от отношения сигнал/шум а) в изначальном поиске границы слова; при обнаружении изменения поларноси символа с помощью
от отношения сигнал/шум а) в изначальном поиске границы слова; при обнаружении изменения поларноси символа с помощью ![]() длительностю б)
длительностю б) ![]() , в)
, в) ![]() , г)
, г) ![]() .
.
С увеличением отношения сигнал/шум коэффициент шума также уменьшается, но значительно быстрее в сравнении с первой методикой.
Таким образом, методика синхронизации после обнаружения заднего фронта кодового слова с помощью ПСПМВ обеспечивает лучшие корреляционные характеристики по энергетике, однако при этом требуются большие вычислительные затраты и затраты по памяти.
Список литературы
1. Васин В.А., Власов И.Б., Егоров Ю.М. и др. Информационные технологии в радиотехнических системах / Под ред. И.Б. Федорова. М.: Изд-во МГТУ им. Н.Э. Баумана, 2011. 848 с.
2. Власов И.Б. Глобальные спутниковые системы: учеб. пособие. М.: Изд-во МГТУ им. Н.Э. Баумана, 2008. 182 с.
3. ГЛОНАСС. Принципы построения и функционирования / Под ред. В.Н. Харисова, А.И. Перова. 3-е изд., перераб. М.: Радиотехника, 2005. 688 с.
4. Тихонов В.И., Харисов В.Н. Статистический анализ и синтез радиотехнических устройств и систем. М.: Радио и связь, 1991. 608 с.
5. ГЛОНАСС. Интерфейсный контрольный документ. Навигационный радиосигнал в диапазонах L1, L2 (редакция 5.1) (pdf, 1,2 Мбайт). М.: Российский Научно-Исследовательский Институт Космического Приборостроения, 2008. Режим доступа: http://aggf.ru/gnss/glon/ikd51ru.pdf (дата обращения 23.11.2012).
6. Интерфейсный контрольный документ GPS (редакция 200F) – официальное техническое описание параметров и сигнала GPS (pdf, 1,6 Мбайт), 2012. Режим доступа: http://www.gps.gov/technical/icwg/ (дата обращения 23.11.2012).
7. Харисов В.Н., Пастухов А.В. Упрощение моделирования приемников СРНС на основе введения статистически эквивалентных корреляторов // Радиотехника (Журнал в журнале). 2002. № 7. С. 106-112.
8. Understanding GPS: Principles and Applications / Kaplan E.D., Hegarty C., Eds. Boston: Artech House Publishers Inc., 2005. 680 p.
9. Proakis John G. Digital Communications. 4th edition. New York: McGraw-Hill, 1995. 905 p.
10. Borre K., Akos D.M., Bertelsen N., Rinder P., Jensen S.H. A Software-Defined GPS and Galileo Receiver: A Single-Frecuency Approach. Boston: Birkhäuser, 2007. 176 p.
Публикации с ключевыми словами: синхронизация, радионавигация, ГЛОНАСС, ГНСС, цифровая информация
Публикации со словами: синхронизация, радионавигация, ГЛОНАСС, ГНСС, цифровая информация
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||