научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 12, декабрь 2012
DOI: 10.7463/1212.0496400
УДК 621.313 +06
Россия, ФГБОУ ВПО «Ростовский государственный университет путей сообщения»
4_maxim_4@bk.ru
Введение
Вентильно-индукторные электрические машины (ВИМ) в настоящее время можно рассматривать как наиболее перспективный вид электромеханического преобразователя энергии. Отсутствие проводников и скользящего контакта на роторе, сосредоточенные катушки статора обуславливают не только технологичность изготовления, но и высокие показатели надежности. Это позволяет применять привод на основе ВИМ при недопустимых для других видов электрических машин условиях эксплуатации (высокая температура, радиация, повышенное давление, запыленность и тому подобное).
Для эффективного использования возможностей ВИМ необходимо управлять током возбуждения фаз в соответствии с положением ротора. Обычно для этого используют физические датчики положения ротора, закрепляемые на валу машины (оптоэлектронные датчики, датчики Холла). Для установок, предназначенных для работы в неблагоприятных условиях окружающей среды, датчик положения может стать лимитирующим фактором. Между тем, определять положение ротора ВИМ можно косвенно, используя зависимость потокосцепления фазы ψ от тока возбуждения i и положения ротора θ (рисунок 1) [1]. Системы управления, основанные на косвенном определении положения ротора, принято называть бездатчиковыми системами.
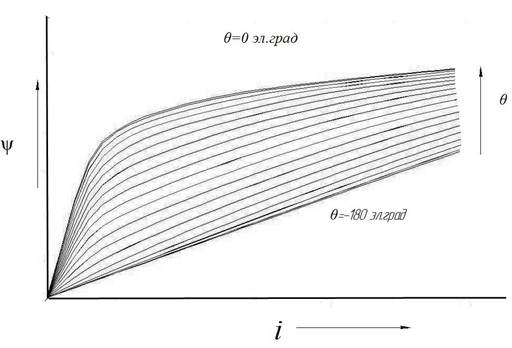
Рисунок 1 – Зависимость ψ(i, θ)
В настоящее время исследователями опубликовано немало работ по синтезу и исследованию бездатчиковых систем управления ВИМ. Обычно методы позиционирования ротора принято классифицировать на методы измерения показателей активной фазы и методы, основанные на измерении показателей пассивной фазы. Использование методов первой группы ограничивает возможные алгоритмы управления током активной фазы, а, следовательно, и моментом ВИМ. Среди методов, основанных на измерении показателей пассивной фазы, обычно выделяют методы зондирования, основанные на приложении коротких импульсов напряжения. В этом случае возможно применение любого алгоритма управления током активной фазы, однако, необходимо учитывать влияние тока зондирования на показатели энергетической эффективности и на форму кривой момента, если ток зондирования соизмерим с током фазы. А если ток зондирования мал и соизмерим с уровнем помех, то необходима защита от помех.
Другой подход позволяет выделить методы, основанные на использовании маркеров и методы, основанные на оперировании информацией, представленной в виде поисковых таблиц, которые требуют не только большого объема памяти микропроцессора системы управления, но и затрат времени на определение (часто экспериментальное) заносимых данных. Кроме того, поисковые таблицы не учитывают возможные различия в характеристиках фаз, которые могут возникнуть при технологических неточностях изготовления ВИМ. Методы, основанные на использовании маркеров, как правило, ограничены по частоте вращения ротора или алгоритму управления током возбуждения.
Несмотря на большое количество существующих методов косвенного позиционирования ротора, ни один из них не может в полной мере заменить датчик положения. Для решения задачи бездатчикового управления необходимо создание комплексного алгоритма, который должен включать в себя процедуры определения стартового положения и возможной стартовой частоты вращения ротора, бездатчикового пуска, а также достижение ВИМ требуемой частоты вращения ротора и работу на ней. При этом необходимо учитывать возможное отличие в характеристиках фаз, а также обеспечить возможность реализации алгоритмов снижения пульсаций электромагнитного момента.
Материал и результаты исследования
Для определения стартового положения ротора в [2] предложено одновременно во все фазы подать зондирующие импульсы. Далее после сравнения амплитуд тока зондирования определяют фазу, в которую должен подаваться первый силовой импульс напряжения. При этом не используется предварительно занесенная информация о ВИМ и обеспечивается необходимая для старта точность определения положения ротора.
Представляет интерес ситуация, когда ротор ВИМ уже имеет начальную частоту вращения. В этом случае полученные данные могут устареть к моменту подачи силового импульса напряжения. Если при этом положение ротора будет соответствовать генераторному режиму работы ВИМ, это может привести к возникновению ударного взаимодействия ротора и исполнительного механизма. Для более точного определения стартового положения ротора рационально сохранить в памяти микропроцессора системы управления результат определения положения ротора и повторить процедуру зондирования с последующим сравнением полученного результата с занесенным в память. Таким образом, используя серию импульсов вместо единичного зондирования можно исключить ошибки при стартовом позиционировании ротора.
Поскольку для решения задачи бездатчикового управления было решено отказаться от использования предварительно определенной информации о ВИМ, процедуру бездатчикового пуска рационально синтезировать на основе использования маркеров. В пусковых режимах ток активной фазы управляется в режимах токового ограничения или токового коридора, поэтому точность позиционирования ротора можно обеспечить применением методов зондирования. Алгоритм поясняется на примере 3-фазной ВИМ конфигурации 6/4 для вращения ротора в направлении против часовой стрелки (рисунок 2).

Рисунок 2 – Процесс бездатчикового пуска ВИМ конфигурации 6/4
1 – В начальный момент времени ротор находится в случайном положении (рисунок 2а), стартовая частота ротора равна нулю. После подачи зондирующих импульсов определена фаза, к которой будет приложен первый силовой импульс напряжения.
2 – После процедуры определения стартового положения к первой активной фазе прикладывается силовой импульс напряжения. В это же время к следующей согласно алгоритму управления фазе прикладывают зондирующие импульсы.
3 – Амплитуда тока зондирования im сравнивается с амплитудой предыдущего импульса. Равенство амплитуд достигается в момент притяжения зубца ротора к зубцу статора активной фазы (положение ротора относительно активной фазы θ=360 эл.град., относительно зондируемой – θ=240 эл.град.) (рисунок 2б).
4 – Активная фаза переключается (рисунок 2в). Силовой импульс напряжения прикладывается к зондируемой фазе, к следующей согласно алгоритму управления фазе (θ=120 эл.град.) прикладывают зондирующие импульсы.
5 – Амплитуда тока зондирующего импульса сравнивается с предыдущим значением. Поскольку в начальный момент фаза находится на участке спада индуктивности, амплитуда тока зондирующих импульсов по мере перемещения ротора будет увеличиваться. При этом максимальное значение тока зондирования будет соответствовать положению ротора 180 эл. град. относительно зондируемой фазы и 300 эл. град. относительно активной фазы соответственно. Таким образом, при получении амплитуды, которая меньше предыдущего значения, можно сделать вывод, что зондируемая фаза прошла рассогласованное положение. Далее фазы переключают и повторяют шаги 4, 5.
Так осуществляется бездатчиковый пуск ВИМ при постоянных значениях углов открытия и закрытия полупроводниковых ключей преобразователя 180 и 300 эл. град. до достижения постоянной частоты вращения ротора. Для последующего увеличения частоты вращения до требуемой величины необходимо сдвигать углы коммутации, т.е. подавать силовой импульс напряжения в активную фазу до достижения рассогласованного положения θ=180 эл.град. При этом невозможно определять положение ротора с помощью описанного алгоритма. Кроме того на средних и высоких частотах ток возбуждения протекает по фазной обмотке большую часть электрического такта ВИМ, поэтому время для подачи зондирующего импульса ограничено. В этом случае определить положение ротора можно с помощью поисковых таблиц. Для этого во время процедуры бездатчикового пуска при установившейся частоте вращения ротора необходимо заносить в память системы управления амплитуду тока зондирующего импульса и соответствующее положение ротора, полученное путем интерполяции. Следует учесть, что данные должны собираться для каждой фазы в отдельности. В этом случае учитываются технологические погрешности изготовления ВИМ, а также зазоры в подшипниковых узлах, которые при использовании единой таблицы для всех фаз могут влиять на точность определения положения ротора. Из полученных данных интерполируется зависимость амплитуды тока зондирования от положения ротора im(θ). При последующем увеличении частоты вращения ротор позиционируется с помощью заполненных в течение процесса пуска поисковых таблиц.
Таким образом, описанный комплексный алгоритм бездатчикового управления ВИМ решает задачи определения стартового положения и возможной стартовой частоты вращения ротора, бездатчикового пуска и последующего бездатчикового управления. При этом алгоритм основан на методике зондирования и совмещает использование маркеров и поисковых таблиц. Кроме того, учтенное различие в показателях фаз поможет снизить погрешность определения положения ротора.
Моделирование описанного алгоритма проводилось в системе SIMULINK для 3-фазной ВИМ конфигурации 12/14 работающей режиме холостого хода. Математическая модель ВИМ представляет собой систему уравнений 1 [3]
 (1)
(1)
где in – ток возбуждения n-й фазы, А;
Lдn – дифференциальная индуктивность n-й фазы, Гн;
θ – угол поворота ротора, рад;
u – напряжение, В;
R – активное сопротивление фазной обмотки, Ом;
ω – частота вращения ротора, рад/с;
ψn – потокосцепление n-й фазы, Вб;
J – момент инерции ротора, кг∙м2;
Tn – электромагнитный момент, производимый током n-й фазы, Нм;
TL – момент сопротивления на валу ВИМ, Нм.
Начальные данные для расчета в виде массивов ψ(i, θ), Lд(i, θ) и T(i, θ) были получены из полевых расчетов методом конечных элементов. ∂ψ(i, θ)/∂θ определена в MATLABпутем дифференцирования функции ψ(i, θ). Система уравнений 1 была использована в SIMULINK (рисунок 3).
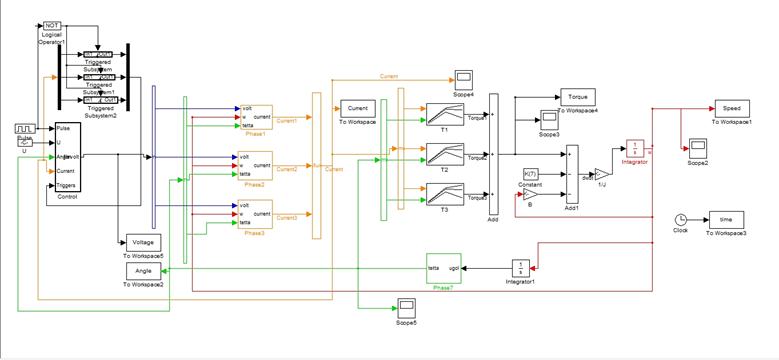
Рисунок 3 – Модель ВИМ конфигурации 12/14 выполненная в SIMULINK
Блоки Phase1, Phase2 и Phase3 содержат уравнения Кирхгофа для тока фаз (рисунок 4).

Рисунок 4 – Представление уравнения Кирхгофа в Simulink
В результате моделирования ВИМ в режиме бездатчикового пуска при напряжении питания 50 В при ограничении фазного тока на значении 2 А было определено, что ротор достигнет частоты вращения 20 рад/с. Кривая фазного тока показана на рисунке 5.

Рисунок 5 – Кривая фазного тока
Физическое моделирование бездатчикового пуска осуществлялось на установке, включающей 3-х фазную ВИМ с соотношением зубцов статора и ротора 12/14 номинальной мощностью 3 кВт и номинальной частотой вращения 3000 мин-1, а также преобразователь, система управления которым выполнена на основе микроконтроллера TexasTMS320F2809. Осциллограмма фазного тока приведена на рисунке 6.

Рисунок 6 – Осциллограмма фазного тока ВИМ в режиме бездатчикового пуска (1 В соответствует 7,5 А)
Заключение
Предложенный и исследованный комплексный алгоритм бездатчикового управления ВИМ совмещает использование маркеров и поисковых таблиц, не требует предварительной информации о ВИМ и может быть реализован с применением современных микроконтроллеров.
Бездатчиковая система управления ВИМ позволяет применять вентильно-индукторный привод в тяжелых условиях эксплуатации, в которых датчики положения ротора работают не надежно или не работают совсем.
Список литературы
1. Acarnley P., Hill R., Hooper C. Detection of rotor position in stepping and switched reluctance motors by monitoring of current waveforms // IEEE Trans. Industrial Electronics. 1985. Vol. IE-32, no. 3. P. 215–222. DOI: 10.1109/TIE.1985.350161
2. Panda D., Ramanarayanan V. Accurate position estimation in switched reluctance motor with smooth starting // Industrial Technology 2000: Proceedings of IEEE International Conference. Vol. 1. 2000. Vol. 2. P. 388-393. DOI: 10.1109/ICIT.2000.854153
3. Кузнецов В.А., Кузьмичев В.А. Вентильно-индукторные двигатели. М.: ИздательствоМЭИ, 2003. 70 с.
Публикации с ключевыми словами: вентильно-индукторная машина, положение ротора, бездатчиковое управление
Публикации со словами: вентильно-индукторная машина, положение ротора, бездатчиковое управление
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||