научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 11, ноябрь 2012
DOI: 10.7463/1112.0491497
УДК 62-522
Россия, МГТУ им. Н.Э. Баумана
Salman.73@mail.ru
Введение
В электрогидравлическом приводе с сервоуправлением входной сигнал после электронного усилителя (ЭУ) и электромеханического преобразователя (ЭМП) превращается в перемещение элементов (заслонки, струйной трубки) первой ступени электрогидравлического усилителя (ЭГУ). Вторая ступень ЭГУ имеет распределительный золотник, регулирующий поток жидкости под давлением, которая подводится от источника энергопитания гидропривода (рис 1) ![]() .
.
В ЭГУ с пропорциональным управлением распределительный золотник непосредственно соединен с якорем ЭМП, мощность которого зависит от действующих на золотник сил (рис 2).
В данной работе рассматривается способ уменьшения требуемой мощности ЭМП путем уравновешивания гидродинамических сил, действующих на распределительный золотник.
Для расчета этих сил применен метод конечных элементов (МКЭ), с помощью которого определялась форма поверхности золотника, обеспечивающая минимальные значения гидродинамических сил.

Рис. 1. Электрогидравлический привод с сервоуправлением (ЭГУ с двумя ступенями усиления).
1- ЭМП. 2-якорь магнита ЭМП. 3-сопла ГУ. 4-Упругий стержень обратной связи от золотника к заслонке. 5-золотник. 6-дроссели первой ступени ГУ.

(а) (б)
Рис. 2. Электрогидравлический привод с пропорциональным управлением (ЭГУ с одной ступенью усиления), подвод жидкости в центре (а) и по краям золотника (б). 1- ЭМП. 2- якорь магнита ЭМП. 3-жесткий стержень, 4- золотник, 5- полость-2, 6- полость-1.
Уменьшение гидродинамических сил достигается путем изменения осевой составляющей количества движения рабочей жидкости (РЖ) на выходе из полости низкого давления по сравнению с количеством движения на входе в полость высокого давления. Тем самым искусственно создается противоположно направленная осевая сила, пропорциональная смещению золотника от его нейтрального положения.
В книге ![]() описаны результаты экспериментальных исследований, которые показали, что за исключением области очень малых смещений золотника указанный выше метод обеспечивают уменьшение гидродинамических сил при всех возможных значениях давлений и скоростей течения РЖ.
описаны результаты экспериментальных исследований, которые показали, что за исключением области очень малых смещений золотника указанный выше метод обеспечивают уменьшение гидродинамических сил при всех возможных значениях давлений и скоростей течения РЖ.
Используемая при расчетах сетка 3D модели РЖ в каждой полости распределительного золотника содержит 132538 элементов и 27125 узлов, показана на рис. 3.
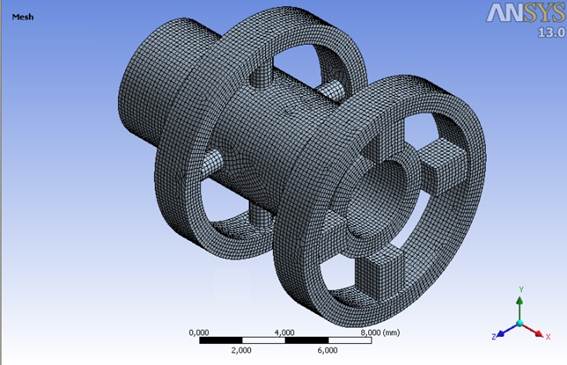
Рис. 3. 3D модель расчётной сетки распределения РЖ (132538 элементов и 27125 узлов).
Результаты расчета приведены на рисунке 4, там же показан график изменения гидродинамической силы в зависимости от смещения золотника, который получен аналитическим методом ![]() .
.

Рис. 4. Графики гидродинамических сил, полученных с помощью МКЭ и аналитическим методом
С помощью МКЭ определялось поверхность золотника, при которой можно существенно уменьшить действующие на него гидродинамические осевые силы, исходная расчетная схема приведена на рисунке 5.

Рис. 5. Расчетная схема при определении способа уравновешивания гидродинамических сил с подводом РЖ в центре золотника типа «а»; 1-гильза , 2-золотник
Влияние размеров, которые показаны на рисунке 5, на значения приложенных к золотнику гидродинамических сил иллюстрируют графики на рисннках.6, 7, и 8.

Рис. 6. Графики зависимостей проекций X,Y,Z силы, действующей на золотник, от угла θ°, при смещении золотника 0,6 мм (полость-2)

Рис. 7. Графики зависимостей проекций X,Y,Z силы, действующей на золотник, от длины L , при смещении золотника 0,6 мм ( полость-2)

Рис. 8. Графики зависимостей проекций X,Y,Z силы, действующей на золотник, от угла α°, при смещении золотника 0,6 мм ( полость-2)
На рис. 9 показана 3D модель золотника с профилированной поверхностью, давление питания подведено в центре золотника.

Рис. 9. 3D модель золотника после уравновешивания гидродинамических сил путем профилирования поверхности, золотника с подводом давления в его центре
При определение гидродинамических сил сначала были вычислены давления на поверхности золотника в полости-1 и в полости-2 (рис. 10), а затем гидродинамические осевые силы, действующие на золотник в этих полостях (рис. 11).


полости-2 полости-1
Рис. 10. Распределение давления на поверхности золотника в полости-1 и полости-2 при смещении золотника 0,6 мм


полости-2 полости-1
Рис. 11. Распределение осевых сил гидродинамических, действующих на золотник в полости-1 и полости-2, при смещении золотника 0,6 мм
В результате, была получена суммарная гидродинамическая осевая сила -26; Н для профилированного золотника. Для непрофилированного золотника, эта гидродинамическая осевая сила равна -46; Н.

Рис. 12. Сравнение осевых гидродинамических сил, полученных с помощью МКЭ для непрофилированного и профилированного золотника типа «а».
Для сравнения осевых сил, полученных МКЭ для непрофилированного золотника и золотника с профилированной поверхностью, определены зависимости гидродинамических сил от смещения золотника (рис. 12). Штриховыми линиями показаны линеаризованные зависимости изменения гидродинамической силы.
В случае, когда золотник выполнен как на рис. 2.б с подводом жидкости по краям золотника, необходимо рассматривать совместно полости-1 и 2. Они должны быть похожи друг на друга и каждая полость должна быть симметричной относительно осей Z1 или Z2 (рис. 13).
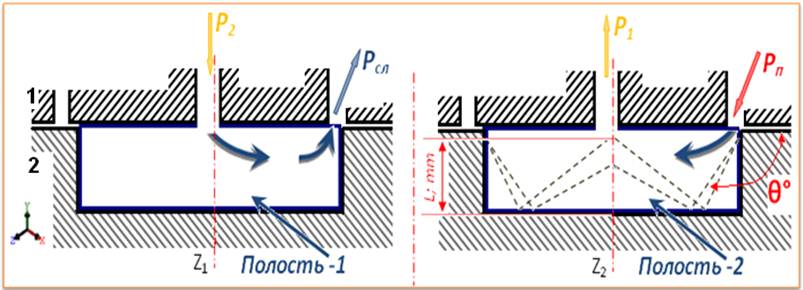
Рис. 13. Расчетная схема при определении способа уравновешивания гидродинамические сил с подвидом РЖ по краям золотника «б» 1-гильза , 2-золотник.
После определения гидродинамических сил при изменения размерных величин золотника получены графики на рисунках 14 и 15, которые показывают зависимости проекций X,Y,Z силы, действующей на золотник от длины L и угла θ°.

Рис. 14. Графики зависимостей проекций X, Y, Z силы, действующей на золотник, от длины L, ( полость-1 и полость-2)
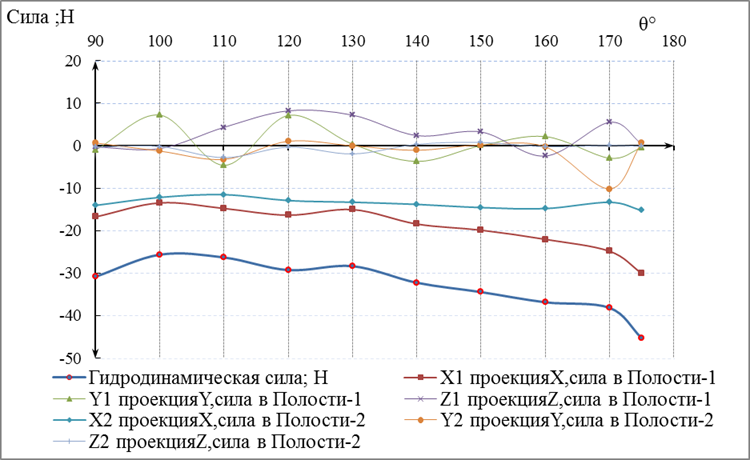
Рис. 15. Графики зависимостей проекций X,Y,Z силы, действующей на золотник, от угла θ°, (полость-1 и полость-2)
На рисунке 16 показана 3D модель золотника с профилированной поверхностью, давление питания подведено по краям золотника (тип «б»).

Рис. 16. 3D модель золотника после уравновешивания гидродинамических сил путем профилирования поверхности золотник (тип «б»)
С помощью МКЭ, сначала определено распределение давления на поверхности золотника в полости-1 и полости-2 (рис. 17) . Затем вычислены осевые силы, действующие на золотник в полости-1 и полости-2 (рис.18), при смещении золотника на максимальном значении 0,6 мм, для золотника типа «б».


полости-1 полости-2
Рис. 17. распределение давления на поверхности золотника в полости-1 и полости-2 при смещении золотника 0,6 мм


полости-1 полости-2
Рис. 18. Распределение осевых сил, действующих на золотник в полости-1 и полости-2 при смещении золотника 0,6 мм.
В результате, была получена суммарная гидродинамическая осевая сила -24,5; Н для профилированного золотника. Для непрофилированного золотника, гидродинамическая осевая сила равна -46; Н.

Рис. 19. Сравнение осевых гидродинамических сил, полученных по МКЭ для непрофилированного и профилированного золотника типа «б».
Для сравнения осевых сил, полученных с помощью МКЭ для непрофилированного золотника, и золотника с профилированной поверхностью определены зависимости гидродинамических сил от смещения золотника (рис. 19).
На этом графике, штриховые линии представляют собой линеаризованные зависимости изменения гидродинамической силы, действующие на золотник.
Исследования влияния точности изготовления золотника на гидродинамические силы, рассмотрено на основании работы ![]() , которая посвящена проектированию характеристик золотниковых распределителей в области «нуля». Оценка эквивалентности радиуса
, которая посвящена проектированию характеристик золотниковых распределителей в области «нуля». Оценка эквивалентности радиуса ![]() была сделана по результатам экспериментального исследования партии золотниковых распределителей, имевших 90 одинаковых золотниковых щелей, при этом золотники с диаметрами
была сделана по результатам экспериментального исследования партии золотниковых распределителей, имевших 90 одинаковых золотниковых щелей, при этом золотники с диаметрами ![]() , радиальные зазоры составляли
, радиальные зазоры составляли ![]() , перекрытия отсеченных кромок находились в интервале
, перекрытия отсеченных кромок находились в интервале ![]() ,
,
![]() (рис. 20) указанный выполнен для равных значений коэффициента расхода при малых смещения золотника. Но в работе
(рис. 20) указанный выполнен для равных значений коэффициента расхода при малых смещения золотника. Но в работе ![]() показано, что по мере приближения проходных сечения золотникового распределителя к нулю зависимость
показано, что по мере приближения проходных сечения золотникового распределителя к нулю зависимость  дает все увеличивающуюся ошибку, так как в реальном потоке жидкости квадратичная зависимость уступает место линейной. В этой формуле μ коэффициент расхода;
дает все увеличивающуюся ошибку, так как в реальном потоке жидкости квадратичная зависимость уступает место линейной. В этой формуле μ коэффициент расхода;![]() площадь проходного сечения окна открываемого кромкой золотника;
площадь проходного сечения окна открываемого кромкой золотника; ![]() перепад давления на окне;
перепад давления на окне;![]() плотность жидкости.
плотность жидкости.

Рис. 20. Схема формирования малых проходных сечений окон золотника
На рис. 21 приведены, схемы для расчета осевых сил в зазоре золотникового распределителя (непрофилированный золотник типа (A) и профилированный золотник типа (B)).

Рис. 21. Схемы для расчета осевых сил с учетом течения РЖ в зазорах золотникового распределителя.1- втулка , 2- золотник; A - непрофилированный золотник; B - профилированный золотник
При применении МКЭ предварительно была получена расчётная сетка распределения жидкости в полости и зазоре золотникового распределителя (рис. 22).


(A) (B)
Рис. 22. 3D модель расчётной сетки распределения жидкости в зазоре и полости золотникового распределителя, ![]() ; (82117 элементов и 89555 узлов), (A - непрофилированный золотник) (B- профилированный золотник)
; (82117 элементов и 89555 узлов), (A - непрофилированный золотник) (B- профилированный золотник)
На рисунке 23 показано, распределение давления на поверхности непрофилированного золотника в полостях 1 и2 при зазоре, 2 мкм и процессы течения жидкости в полости золотника. Управление потоком РЖ на входе так и на выходе, рассматривалось как золотникового распределителя.


полость 1 полость 2
Рис. 23. Распределение давления на поверхности непрофилированного золотника, в полостях 1и2 при![]()
На рисунке 24 показано, распределение давления на поверхности профилированного золотника в полостях 1 и2 при ![]() и процессы течения жидкости в полости золотника. Управление потоком РЖ на входе так и на выходе, рассматривалось как золотникового распределителя.
и процессы течения жидкости в полости золотника. Управление потоком РЖ на входе так и на выходе, рассматривалось как золотникового распределителя.


полость 1 полость 2
Рис. 24. Распределение давления на поверхности профилированного золотника, в полостях 1 и 2 при ![]()
Графики значений гидродинамических сил в золотником распределителе в зависимости от величины зазора ![]() при максимальном смещении золотника 0,6 мм даны на рис. 25.
при максимальном смещении золотника 0,6 мм даны на рис. 25.
 (A)
(A)
 (B)
(B)
Рис. 25. Изменение гидродинамической силы в зависимости от величины зазора ![]() при смещении золотника 0,6 мм; (A) - непрофилированного золотника, (B) - профилированного золотника
при смещении золотника 0,6 мм; (A) - непрофилированного золотника, (B) - профилированного золотника
Чтобы выяснить, как влияет радиус R ( рис. 20) на гидродинамические силы с помощью МКЭ били вычислены гидродинамические силы при изменение этого радиуса от 0 мкм до 25 мкм для максимального смещения золотника 0,6 мм. Результаты представлены графиками на рисунке 26.

Рис. 26. Изменение гидродинамической силы в зависимости от радиуса R при смещении золотника 0,6 мм, непрофилированного золотника
Сравнение требуемых мощностей электрических и гидравлических сигналов для ЭГУ с сервоуправлением и с пропорциональным управлением (имеющего профилированный золотник), можно сделать по представленный ниже таблице.
Таблица
Мощность сигналов | ЭГУ с сервоуправлением | ЭГУ с пропорциональным управлением | ||
|
|
| ||
|
|
|
|
|
|
| - | - | - |
|
|
|
|
|
В таблице:
![]() - мощность электрического сигнала;
- мощность электрического сигнала;
![]() - мощность гидравлического сигнала;
- мощность гидравлического сигнала;
![]() - мощность, необходимая для управления ЭГУ;
- мощность, необходимая для управления ЭГУ;
![]() - гидродинамическая сила, вычисленная аналитическим методом для непрофилированного золотника;
- гидродинамическая сила, вычисленная аналитическим методом для непрофилированного золотника;
![]() - гидродинамическая сила, вычисленная с помощью МКЭ для непрофилированного золотника;
- гидродинамическая сила, вычисленная с помощью МКЭ для непрофилированного золотника;
![]() - гидродинамическая сила, вычисленная с помощью МКЭ для профилированного золотника;
- гидродинамическая сила, вычисленная с помощью МКЭ для профилированного золотника;
Заключение и выводы
· Профилирование поверхности золотника с подводом жидкости в центре обеспечивает уменьшение гидродинамической силы до значения, равного 43,5 % от силы при непрофилированном золотнике.
· Профилирование поверхности золотника с подводом жидкости по краям обеспечивает уменьшение гидродинамической силы до значения, равного 41,3 % от силы при непрофилированном золотнике.
· Размер зазора между золотником и втулкой мало влияет на гидродинамическую силу.
· Размер радиуса кромок золотника и втулки не влияет на гидродинамическую силу.
· Уменьшение гидродинамических сил путем профилирования поверхности золотника обеспечивает снижение требуемой суммарной мощности, необходимой для управления ЭГУ.
Списоклитературы
1. Попов Д.Н. Механика гидро-и пневмоприводов: учебник. М.: Изд-во МГТУ им. Н.Э. Баумана, 2002. 320 с.
2. Литвин-Седой М.З. Гидравлический привод в системах автоматики. М.: Машгиз, 1956. 312 с.
3. Попов Д.Н. Динамика и регулирование гидро- и пневмосистем. М.: Машиностроение, 1987. 464 с.
4. Фомичев В.М. Проектирование характеристик золотниковых распределителей в области «нуля» // Гидравлика и пневматика. 2005. № 20. C. 49-54.
5. Лещенко В.А. Гидравлические следящие приводы станков с программным управлением. М.: Машиностроение, 1975. 288 с.
6. Попов Д.Н. О силах сопротивления, возникающих в золотниковых устройствах // Вестник машиностроения. 1958. № 2. С. 26-28.
7. Ильин М.Г., Бекиров Я.А. Технология изготовления прецизионных деталей гидропривода. М.: Машиностроение, 1971. 160 с.
Публикации с ключевыми словами: метод исследования, сила гидродинамическая, поверхность золотника
Публикации со словами: метод исследования, сила гидродинамическая, поверхность золотника
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||