научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 11, ноябрь 2012
DOI: 10.7463/1112.0486309
УДК 629.113
ГНЦ РФ – ФГУП «НАМИ»
НГТУ им. Р.Е. Алексеева
a.n.blokhin@gmail.com
denisenkoel@gmail.com
Одной из важный тенденций развития современных механических коробок передач является все возрастающее применение автоматизированного управления сцеплением и переключением передач. Практически все известные фирмы, как, например, ZF, Volvo, Mercedes-Benz, Scania, Renault, Eaton и др. устанавливают в виде штатного или по требованию заказчика автоматизированное управление коробками передач [1]. Применение автоматизированного управления, кроме всего прочего, обеспечивает уменьшение времени переключения передач (для грузовых автомобилей в 1,5-2 раза) и, соответственно, улучшение разгонных качеств автомобиля и повышение экономичности автомобиля за счет автоматического оптимального выбора момента переключения.
Система автоматического управления должна производить переключения передач на основе заданного закона автоматического управления переключением передач [2], которым называют совокупность зависимостей моментов переключения передач (как с низших на высшие передачи, так и наоборот) от главных факторов – скорости автомобиля и нагрузки двигателя, которую определяют по положению педали управления подачей топлива. При этом для успешного функционирования системы в ее алгоритме работы должно быть заложено, что каждый раз перед переключением передач определяться оптимальное время, которое должно быть отведено на работу исполнительных механизмов в данных условиях движения и которое будет определять величину изменения мощности на ведущих колесах до и после переключения передач.
Из теории автомобиля [3] и работ, выполненных по выбору передаточных чисел трансмиссии [4], известно, что передаточные числа ступенчатых коробок передач наиболее часто составляют числовой ряд геометрической прогрессии (геометрический ряд) или гармонический ряд. И в том, и в другом случае существует знаменатель прогрессии q, определяемый выражением:
 , (1)
, (1)
где ![]() - частоты вращения вала двигателя, в пределах которых осуществляется разгон на передаче; uki, uki+1– передаточные числа соседних передач.
- частоты вращения вала двигателя, в пределах которых осуществляется разгон на передаче; uki, uki+1– передаточные числа соседних передач.
При этом интервал ![]() можно назвать теоретическим диапазоном изменения частот вращения вала двигателя при переключении передач или теоретическим кинематическим интервалом оборотов ведущих частей трансмиссии. Характеризовать данный интервал удобно безразмерной величиной q, которую будем в дальнейшем называть показателем, характеризующим кинематический интервал оборотов ведущих частей трансмиссии.
можно назвать теоретическим диапазоном изменения частот вращения вала двигателя при переключении передач или теоретическим кинематическим интервалом оборотов ведущих частей трансмиссии. Характеризовать данный интервал удобно безразмерной величиной q, которую будем в дальнейшем называть показателем, характеризующим кинематический интервал оборотов ведущих частей трансмиссии.
В действительных условиях работы автомобиля процесс переключения передач происходит во времени и связан в общем случае с изменением скорости автомобиля, что фактически приводит к значительному отличию величин действительного интервала оборотов ведущих частей трансмиссии от кинематического интервала, обусловленного только интервалом ступеней передаточных чисел. Особенно усугубляется влияние фактора времени переключения передач при значительных величинах суммарного дорожного сопротивления Ψ = f×cosα± sinα, где f – коэффициент сопротивления качению, α – угол продольного уклона дороги [3]. Это характерно для работы в тяжелых дорожных условиях – гористой местности, карьерах, в условиях бездорожья и т.д., а также при переключении передач на высоких скоростях движения автомобиля. Действительный интервал оборотов ведущих частей трансмиссии определяется величиной кинематического интервала ступеней передаточных чисел и изменением скорости автомобиля за время переключения передач [5]. На графиках, представленных на рисунках 1 и 2, выражающих зависимость Ne=f(v) качественно представлена картина изменения скорости и мощности двигателя за время переключения как на высшую, так и на низшую передачи при различных значениях коэффициента суммарного дорожного сопротивления Ψ. Из этих графиков видно, что величина используемой мощности двигателя в зависимости от характера и величины изменения скорости автомобиля после переключения передач может приобретать самые различные значения при постоянных кинематических параметрах коробки передач.

Рисунок 1. – График изменения скоростных и мощностных показателей автомобиля при переключении на высшую передачу для Ψ≥0, Ψ<0
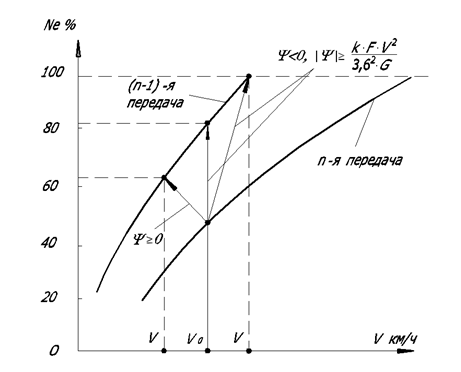
Рисунок 2. – График изменения скоростных и мощностных показателей автомобиля при переключении на низшую передачу для Ψ≥0, Ψ<0
Найдем аналитические зависимости для определения действительной величины интервала оборотов ведущих частей коробки передач, которая имеется в реальных дорожных условиях работы автомобиля. С этой целью, выражая скорость v0 к моменту начала переключения передач и текущее значение скоростиvчерез параметры трансмиссии для случая переключения на высшую передачу, получим
 ,
,  , (1)
, (1)
где q– параметр, характеризующий кинематический интервал оборотов, равный интервалу ступеней трансмиссии,  ;
;
in – передаточное число текущей (низшей) передачи коробки;
in+1 – передаточное число включаемой (высшей) передачи коробки;
λ– показатель, характеризующий действительный интервал оборотов ведущих частей трансмиссии, численно равный  , где nдв_V0 – обороты двигателя, соответствующие начальной скорости v0 переключения передач, nдв_V – обороты двигателя, соответствующие конечной скорости v переключения передач. При этом интервал
, где nдв_V0 – обороты двигателя, соответствующие начальной скорости v0 переключения передач, nдв_V – обороты двигателя, соответствующие конечной скорости v переключения передач. При этом интервал ![]() – называется действительным диапазоном изменения частот вращения вала двигателя при переключении передач или действительным интервалом оборотов ведущих частей трансмиссии.
– называется действительным диапазоном изменения частот вращения вала двигателя при переключении передач или действительным интервалом оборотов ведущих частей трансмиссии.
i0 – постоянное передаточное число трансмиссии (главной передачи);
rk– радиус качения колеса, м.;
nд– обороты двигателя, об/мин.
Тогда из равенства (1) можем найти величину показателя, характеризующего действительный интервал оборотов, выраженный через начальную скорость, текущее значение скорости автомобиля и величину кинематического интервала. Для случая переключения на высшую передачу он будет равен:
 . (2)
. (2)
Для случая переключения на низшую передачу значения v0 и v будут соответственно равны:
 ,
,  ,
,
где in-1 – передаточное число включаемой (низшей) передачи, а величина показателя, характеризующего действительный интервал оборотов, будет выражаться следующей зависимостью:
 . (3)
. (3)
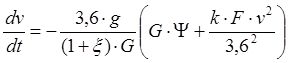
С целью определения изменения скорости автомобиля за время переключения передач напишем дифференциальное уравнение движения автомобиля для случая Ψ > 0 (движение на подъеме) при отключенном двигателе:
 (4)
(4)
где g– ускорение силы тяжести, м/с;
G – полный вес автомобиля, Н;
![]() – коэффициент, учитывающий инерцию вращающихся масс деталей трансмиссии и ходовой части;
– коэффициент, учитывающий инерцию вращающихся масс деталей трансмиссии и ходовой части;
k– коэффициент сопротивления воздуха, Н×с2/м4;
F– площадь Миделя, м2.
Проинтегрировав это уравнение и используя начальные условия v=vопри t=0, получим:
 . (5)
. (5)
Это уравнение применимо для случаев, когда 0≤ v ≤v0.
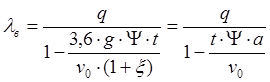
Решая уравнение (5) относительно vи подставляя его значение в уравнение (2), получим выражение для определения показателя, характеризующего действительный интервал оборотов, который имеем на автомобиле, работающем в реальных дорожных условиях, для случая переключения на высшую передачу:
 (6)
(6)
а для случая переключения на низшую передачу величина интервала λн будет выражаться следующей зависимостью:
 (7)
(7)
или, введя замены
 и
и 
получим:
 ;
;  .
.
Дифференциальное уравнение движения автомобиля для случая ![]() (движение на спуске) при отключенном двигателе имеет вид:
(движение на спуске) при отключенном двигателе имеет вид:
Проинтегрировав это уравнение и используя начальные условия v=v0 при t=0, получим:
 , (8)
, (8)
где  .
.
Тогда, подставляя в уравнение (8) значение v из равенства (2), для случая переключения на высшую передачу получим следующую зависимость времени переключения от величины показателя, характеризующего действительный интервал оборотов:
 . (9)
. (9)
Подставляя в уравнение (8) значение vдля случая переключения на низшую передачу, получим следующую зависимость ![]() в неявной форме:
в неявной форме:
 . (10)
. (10)
Запишем дифференциальное уравнение движения для случая Ψ=0 (движение на спуске, когда α = – arctgf ) при отключенном двигателе:
 (11)
(11)
Проинтегрировав это уравнение и используя начальные условия
v=v0 при t=0, получим:
 , (12)
, (12)
где  .
.
Подставляя в уравнение (12) значение v из равенства (2), для случая переключения на высшую передачу получим
 ,
,
откуда
 (13)
(13)
Подставляя в уравнение (12) значение vдля случая переключения на низшую передачу из равенства (3), получим
 ,
,
откуда
 . (14)
. (14)
Проведем исследование полученных зависимостей ![]() для случая переключения на высшую передачу для значений Y как положительных, так и отрицательных. Для большей графической наглядности физического смысла происходящего явления время переключения передач по оси абсцисс (рисунок 3) будет откладываться в обе стороны от оси ординат, причем правая ветвь оси абсцисс соответствует движению автомобиля на подъем, а левая – движению под уклон.
для случая переключения на высшую передачу для значений Y как положительных, так и отрицательных. Для большей графической наглядности физического смысла происходящего явления время переключения передач по оси абсцисс (рисунок 3) будет откладываться в обе стороны от оси ординат, причем правая ветвь оси абсцисс соответствует движению автомобиля на подъем, а левая – движению под уклон.
Анализ уравнений (6) и (2) для случая Ψ>0показывает, что
а) при t=0, v=v0,λв=q;
т.е. при v=v0величина скорости остается постоянной, и действительный интервал оборотов в этом случае равен величине кинематического интервала.
б) при  , v=0,
, v=0, ![]() .
.
Анализируя уравнения (9) и (2) для случая Ψ<0 находим:
а) при t=0, v=v0,λв =q;
б) при  .
.
Величина λ1 определяет нижнюю асимптоту кривой λв=f(t)для Ψ<0.
Графическое изображение функциональных зависимостей величины показателя, характеризующего действительный интервал оборотов от времени переключения передач для случая переключения с низшей на высшую и с высшей на низшую передачи при Ψ≥0, Ψ<0 представлено на рисунке 3.
Кривая efявляется функцией λв=f(t) для значений Ψ≥0, Ψ<0 для случая переключения на высшую передачу.
Участок еkкривой efописывается уравнением (6) для значений Ψ>0 и показывает изменение величины показателя, характеризующего действительный интервал оборотов в функции времени при замедлении автомобиля на подъеме. Скорость автомобиля может находиться в этом случае в интервале v0 ≥ v≥ 0 . Участок kfкривой efописывается уравнением (9) для значений Ψ<0 и показывает изменение величины показателя, характеризующего действительный интервал оборотов в функции времени при разгоне автомобиля под уклон. Скорость автомобиля в этом случае может находиться в интервале v0 ≤ v ≤ v1.
Проведем теперь исследование зависимостей λн=f(t) для случая переключения на низшую передачу в интервале Ψ≥0, Ψ<0, при этом также по оси абсцисс для большей наглядности будем откладывать в обе стороны от оси ординат величину времени переключения передач.
Анализ уравнений (7) и (3) для случая Ψ>0 показывает, что
а) при t=0, v=v0,λн=q;
б) при , v=0, ![]() .
.

Рисунок 3. – График зависимостей λв=f(t), λн=f(t) при переключении передач для Ψ≥0, Ψ<0
Анализируя уравнение (10) и используя уравнение (3) для случая переключения на низшую передачу при Ψ<0, находим:
а) при t=0, v=v0,λн=q;
б) при  .
.
Величина λ2 определяет верхнюю асимптоту кривой λн=f(t)для Ψ<0.
Кривая lnявляется функцией λн=f(t)для значений Ψ≥0, Ψ<0 для случая переключения на низшую передачу. Анализ уравнений (3), (5) и (10) показывает, что характер λн=f(t) и v=f(t)один и тот же.
Участок пkкривой lnописывается уравнением (7) для значений Ψ>0 и показывает изменение величины показателя, характеризующего действительный интервал оборотов, в функции времени при замедлении автомобиля на подъеме. Скорость автомобиля может находиться в этом случае в интервале 0 ≤ v≤ v0. Участок lk кривой lnописывается уравнением (10) для значений Ψ>0 и показывает изменение λн=f(t)при разгоне под уклон. Скорость автомобиля в этом случае может находиться в интервале v0≤v≤ v1. Изменение скорости в функции времени описывается кривой lnи уравнениями (3) и (5) для Ψ>0 (участок kп) и (3) и (10) для Ψ<0 (участок lk).
Участки ksи kuописываются уравнениями (13), (14) и показывают изменение величины показателя, характеризующего действительный интервал оборотов, в функции времени при замедлении автомобиля на подъеме для значений Ψ=0 при переключении соответственно на высшую передачу и при переключении на низшую передачу.
Кривые prи nh. описывают изменение λв=f(t), λн=f(t) при разгоне автомобиля на подъеме задним ходом и особого интереса в связи с этим не представляют. В этом случае λ и vприобретают отрицательные значения.
Если t ≠ 0, а v = const, то имеем λв=λн=q= const(на рисунке 3 этот случай изображен прямой, параллельной оси абсцисс).
Для случая работы в тяжелых дорожных условиях и при больших величинах коэффициента дорожного сопротивления величина скорости движения автомобиля относительно мала и поэтому в первом приближении в интервале скоростей от нуля до 30–40 км/ч силой сопротивления воздуха Рwможно пренебречь по ее относительной малости. В этом случае дифференциальное уравнение движения автомобиля существенно упрощается и имеет единую форму для значений Ψ≥0, Ψ<0:
 .
.
Проинтегрировав это уравнение и использовав начальные условия (при t=0, v=vо), получим:
 (15)
(15)
Тогда, подставляя в уравнение (2) значение vиз уравнения (15), получим для случая переключения на высшую передачу следующую зависимость для λв:
 , (16)
, (16)
где  .
.
Аналогичным образом, используя уравнения (3) и (15) для случая переключения на низшую передачу, величину показателя, характеризующего действительный интервал оборотов, выразим следующей зависимостью:
 . (17)
. (17)
Проведем исследование уравнений (16) и (17), при этом наиболее наглядно и целесообразно с точки зрения лучшего понимания физики явления анализировать изменение показателя, характеризующего действительный интервал оборотов, в функции фактора t×Ψ, так как аргументы t и Ψ взаимно дополняют друг друга, полнее выражая физическую сущность происходящего явления. Графическое изображение зависимостей λв и λн в функции аргумента t×Ψпри Рw=0 представлено на рисунке 4.
Анализ зависимостей (16) и (17) позволяет выявить следующие частные случаи решения уравнений и движения автомобиля:
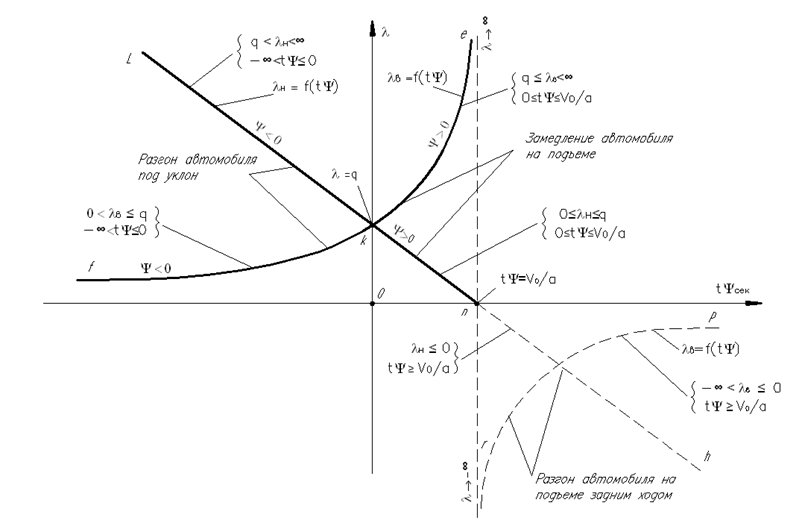
Рисунок 4. – График зависимостей λв = f(t×Ψ), λн =f(t×Ψ) при переключении передач для случая Рw=0
1) фактор t×Ψ=0, Ψ≠0, v=v0, λв= λн =q,т.е. если время переключения передач равно нулю, то действительные интервалы оборотов равны кинематическим величинам;
2) фактор t×Ψ=0, t≠0, v=v0, λв= λн =q, что имеет место, когда Ψ = f×cosα+ sinα=0 или α=-arctgf, т.е. случай, когда автомобиль движется под уклон с углом, равным f, что обусловливает v=const;
3) величина  , тогда факторt×Ψпринимает значение в интервале
, тогда факторt×Ψпринимает значение в интервале  , т.е. имеем случай, когда автомобиль, двигаясь на подъеме, теряет скорость, которая может принимать значения в интервале 0<v<v0, тогда величина λв будет больше q, а величина λн меньше q;
, т.е. имеем случай, когда автомобиль, двигаясь на подъеме, теряет скорость, которая может принимать значения в интервале 0<v<v0, тогда величина λв будет больше q, а величина λн меньше q;
4) величина  , откуда фактор
, откуда фактор  ; этот случай имеет место, когда автомобиль, двигаясь на подъем, потерял скорость до нуля, тогда величина λв=∞, а λн=0;
; этот случай имеет место, когда автомобиль, двигаясь на подъем, потерял скорость до нуля, тогда величина λв=∞, а λн=0;
5) величина  , но фактор t×Ψ>0, что соответствует случаю, когда автомобиль после потери скорости до нуля при движении на подъем начал разгоняться задним ходом (этот случай изображен на рисунке 4 пунктирными линиями); в этом случае величины как λв , так и λн будут меньше нуля;
, но фактор t×Ψ>0, что соответствует случаю, когда автомобиль после потери скорости до нуля при движении на подъем начал разгоняться задним ходом (этот случай изображен на рисунке 4 пунктирными линиями); в этом случае величины как λв , так и λн будут меньше нуля;
6) величина и факторt×Ψ<0; это имеет место, когда автомобиль разгоняется под уклон, т. е. v>v0; величина λвв этом случае меньше q, а λн больше q. При t×Ψ→∞ величина λв→0, а λн →∞ в связи с тем, что при составлении дифференциального уравнения движения Рwбыло принято равным нулю. В действительности же при любых сколь угодно больших величинах фактора t×Ψ значения λв и λн имеют определенные фиксированные значения, ограниченные асимптотами (рисунок 3).
Чтобы яснее представить себе, в какой степени влияет изменение скорости автомобиля на величину действительного интервала оборотов, определим для примера его значение для случая переключения на высшую передачу при следующих исходных данных: v0 = 10 км/ч; q=1,8; Ψ=0,08; t=2 сек; 𝜉=0,03; тогда по уравнению (16) получим
 ,
,
т.е. величина действительного интервала оборотов превышает величину кинематического интервала в 2,2 раза, а именно этим значением λв=4 будет определяться величина мощности двигателя, которую он будет иметь после перехода на высшую передачу. Мощность эта примерно в 2 раза меньше мощности, соответствующей q=1,8, которая бы имелась, если бы отсутствовало сопротивление дороги и воздуха.
В некоторых случаях с целью упрощения расчетов, но с учетом сил сопротивления воздуха Рwможно приближенно допустить, что эти силы за время переключения остаются постоянными. Тогда интеграл уравнения (4) будет равен
 ,
,
и, соответственно, действительный интервал оборотов для случая переключения на высшую передачу будет описываться уравнением
 ,
,
а при переходе на низшую передачу величина λн будет равна
 .
.
Выводы
1. В реальных условиях работы автомобиля величина кинематического интервала ступеней в классическом определении не всегда может достаточно полно характеризовать качестватрансмиссии и автомобиля, что потребовало введения понятия действительной величины интервала оборотов ведущих частей трансмиссии, обусловленного изменением скорости автомобиля за время переключения передач, а также понятий параметров, характеризующих кинематический и действительный интервалы оборотов.
2. Найдены аналитические уравнения связи между параметром, характеризующим действительный интервал оборотов ведущих частей трансмиссии, и параметрами коробки передач, автомобиля и внешних факторов сопротивления.
3. Величина действительного интервала оборотов ведущих частей трансмиссии при переключении передач равна величине кинематического интервала оборотов только в случае движения автомобиля под уклон со скоростью  . Во всех остальных случаях реальных условий эксплуатации автомобиля при значениях показателя, характеризующего кинематический интервал оборотов автомобильных коробок передач, находящихся в диапазоне 1,2–2, величина показателя, характеризующего действительный интервал оборотов может принимать значения от 0 до +∞.
. Во всех остальных случаях реальных условий эксплуатации автомобиля при значениях показателя, характеризующего кинематический интервал оборотов автомобильных коробок передач, находящихся в диапазоне 1,2–2, величина показателя, характеризующего действительный интервал оборотов может принимать значения от 0 до +∞.
4. При переключении на высшую передачу в зоне больших величин Ψ существенно возрастает величина действительного интервала оборотов, что обусловит увеличение работы синхронизации, в соответствии с чем, в этом случае, целесообразно повышение синхронизирующего момента; это позволит улучшить динамические качества автомобиля и одновременно уменьшить величину работы буксования и соответственно износ синхронизаторов.
5. При переходе на низшую передачу с целью повышения эффективности торможения двигателем при движении автомобиля под уклон величина действительного интервала оборотов будет возрастать и, как показывают расчеты, в некоторых случаях может лимитировать возможность включения низшей передачи, что подтверждается практикой эксплуатации автомобилей в горных условиях, в соответствии с чем, необходимо для повышения безопасности при движении на крутых спусках перед началом переключения снижать скорость автомобиля.
6. Расчеты по выведенным зависимостям показывают, что при больших величинах суммарного дорожного сопротивления величина времени переключения передач оказывает на величину действительного интервала оборотов существенно большее влияние, чем собственно величина кинематического интервала ступеней, что требует уделения особого внимания вопросам легкости и быстроты управления в зоне низших передач при работе автомобиля в тяжелых дорожных условиях.
7. Величина действительного интервала оборотов и показатель, характеризующий действительный интервал оборотов, являются достоверными исходными параметрами, которые позволят успешнее решать задачи, связанные с выбором системы управления коробкой передач и ее основных параметров в зависимости от назначения автомобиля, определением величин используемой мощности двигателя в зависимости от условий работы автомобиля, определением разгонных и тяговых качеств автомобиля, и другие вопросы теории автомобиля, а также глубже понять процессы происходящих явлений при переключении передач, обусловленные наличием механической ступенчатой трансмиссии.
В заключении следует отметить, что данная поисковая научно-исследовательская работа проводилась при финансовой поддержке Министерства образования и науки РФ в рамках ФЦП «Научные и научно-педагогические кадры инновационной России на 2009-2013 годы».
Список литературы
1. Недялков А.П., Блохин А.Н. Применение опережающих технических решений при создании механических ступенчатых коробок передач с автоматизированным управлением // Наука и образование. МГТУ им. Н.Э. Баумана. Электрон. журн. – 2011. – № 2.– Режим доступа: http://technomag.edu.ru/doc/165381.html (дата обращения 06.11.2012).
2. Гируцкий О.И., Есеновский-Лашков Ю.К., Поляк Д.Г. Электронные системы управления агрегатами автомобиля.– М.: «Транспорт», 2000.– 213 с.
3. Тарасик В.П. Теория движения автомобиля: учебник для ВУЗов. – Спб.: БХВ-Петербург, 2006. – 478 с.
4. Блохин А.Н. Разработка методики поиска рациональных передаточных чисел трансмиссии с учетом эксплуатационных свойств и назначения автомобиля: автореф. дисс…. канд. техн. наук. – Нижний Новгород, 2006. – 18 c.
5. Недялков А.П. Исследование влияния различных факторов на величину действительного интервала оборотов ведущих частей трансмиссии при переключении передач // Теория, расчет и конструкция автомобилей, их агрегатов и деталей: сб. науч. тр. / НАМИ. – 1975. – Вып. 154.– С. 76-88.
Публикации с ключевыми словами: время переключения передач, переключение передач, действительный интервал оборотов, кинематический интервал оборотов, уравнение движения автомобиля
Публикации со словами: время переключения передач, переключение передач, действительный интервал оборотов, кинематический интервал оборотов, уравнение движения автомобиля
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||