научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 09, сентябрь 2012
DOI: 10.7463/0912.0454475
УДК 543.271; 533.5.08
Россия, МГТУ им. Н.Э. Баумана
Введение
При реализации прецизионных процессов в технологическом и исследовательском оборудовании (в установках групповой и нанолокальной обработки полупроводниковых подложек оптическими, ионными, электронными или рентгеновскими пучками, в сканирующих зондовых микроскопах, в оборудовании адаптивной оптики и др.) зачастую требуется изолировать объект от внешних вибраций [1-4]. Вибрации межэтажных перекрытий, на которых устанавливается прецизионное оборудование, имеют, как правило, широкий спектр частот [5]. Наиболее интенсивные колебания перекрытий в цехах машиностроительных предприятий происходят на частотах от 4 до 30 Гц. При этом амплитуда колебаний в вертикальном направлении составляет от 2 до 3 мкм, в горизонтальном – от 1,8 до 2 мкм. Максимальные колебания перекрытий в лабораториях исследовательских корпусов на высоких этажах происходят на частотах от 10 до 20 Гц с амплитудой колебаний в вертикальном направлении от 4 до 4,7 мкм, в горизонтальном – от 3 до 3,5 мкм [5].
В настоящее время применяются различные типы виброизолирующих устройств: пьезоэлектрические, электромагнитные, гидравлические, пневматические и т.д. Кроме того, они могут быть пассивные и активные, в зависимости от того, подводится к ним дополнительная внешняя энергия для уменьшения амплитуды колебаний или нет. Основным параметром, характеризующим виброизолирующую систему, является коэффициент передачи, равный отношению амплитуд виброперемещений изолируемого оборудования и основания.
Пьезоэлектрические активные демпфирующие устройства (пьезотрубки, пьезостолбцы) обеспечивают точностные и динамические требования, но имеют невысокие нагрузочные характеристики и малый диапазон перемещений [6]. Кроме того, эффективность поглощения энергии колебаний в пьезоэлектрическом материале невысока, поскольку в пьезокристалле преобладают упругие деформации. При этом активная виброизоляция происходит за счет перемещения изолируемого объекта в противофазе внешним колебаниям в режиме стабилизации ускорения или положения.
Электромагнитные виброизолирующие устройства характеризуются, как правило, наличием длинных кинематических цепей, которые ухудшают динамику и точность виброизоляции вследствие малой жесткости и наличия сил трения в передаточных элементах [6].
Гидравлические и пневматические демпферы работают в большинстве случаев в пассивном режиме и не обеспечивают требуемого качества виброизоляции (точности и быстродействия стабилизации изолируемого объекта, степени подавления вибраций) [6]. Это обусловлено наличием сил трения в гидро- и пневмоцилиндрах и управляющих элементах (золотниковых и мембранных регуляторах), сжимаемостью рабочей среды, Кроме того, вязко-упругие системы пассивной виброизоляции эффективно подавляют вибрации, как правило, при частотах более 200 Гц [6]. В низкочастотной области такие системы малоэффективны, т.к. при наличии возбуждающих воздействий возникают интенсивные резонансные колебания, что является главным и трудно устранимым недостатком пассивной вязко-упругой подвески. Для решения задачи снижения вибраций во всем диапазоне рабочих частот необходимо использовать комбинированные системы демпфирования: пассивные при высоких частотах и активные при частотах от 0,5 до 200 Гц.
За рубежом разработан ряд виброзащитных платформ (фирма HALCYONICS, Германия), которые характеризуются активным диапазоном частот от 5 до 13 Гц [7]. Разработаны также вязко-упругие виброизолирующие платформы с отрицательной жесткостью (фирма MinusK®, США), которые имеют следующие характеристики: резонансная частота – 0,5 Гц; коэффициент передачи – 0,05; диапазон частот – 4 … 60 Гц; нагрузка – до 25 кг [8]. Недостатком перечисленных платформ является малая эффективность подавления колебаний (коэффициент передачи более 0,1) при частотах менее 4-5 Гц.
Таким образом, проблема создания систем активной виброизоляции в низкочастотном диапазоне от 0,5 до 200 Гц с высокой степенью подавления колебаний для прецизионного оборудования является чрезвычайно актуальной.
В МГТУ им. Н.Э. Баумана разработаны новые прецизионные активные демпферы на основе магнитореологических (МР) эластомеров [6, 9, 10]. Преимуществами таких демпферов являются больший диапазон перемещений (до 1 мм) и более эффективное поглощение энергии колебаний по сравнению с пьезоэлектрическими демпферами в низкочастотном диапазоне от 0,5 до 200 Гц, возможность активного управления амплитудно-частотными характеристиками с миллисекундным быстродействием и субмикронной точностью перемещений.
Целью работы является сравнительная оценка демпфирующих свойств МР-эластомера и пьезоэлектрического материала и экспериментальные исследования основных рабочих характеристик активного демпфера на основе МР-эластомера: гистерезиса и коэффициента передачи.
Научная новизна исследований заключается в разработке метода регулирования эффективности поглощения энергии колебаний активным демпфером за счет выбора уровня управляющего тока и изменения объемной концентрации магнитных частиц в МР-эластомере.
1 Сравнительная оценка демпфирующих свойств МР-эластомера и пьезокристалла
Для сравнительной оценки эффективности поглощения энергии колебаний МР-эластомера и пьезокристалла (как материала, наиболее часто используемого в системах активной виброизоляции) необходимо рассмотреть процесс деформации с молекулярной точки зрения. При рассмотрении деформации МР-эластомера можно выделить три механизма [11]. Это изменение межатомных расстояний в цепочках макромолекул под действием внешней нагрузки, что характерно, в основном для кристаллических материалов. При таком механизме происходит практически мгновенное деформирование (со скоростью звука), при этом характерны большие значения модуля упругости, а величина обратимых деформаций не превышает доли процента. Это перемещение целых макромолекул относительно друг друга, при котором в образце наблюдается вязкое течение. При этом деформация является необратимой. И, наконец, при действии нагрузки макромолекулы могут менять свою форму: из свернутых становиться более вытянутыми.
Только последний механизм может обеспечить возникновение высокой эластичности МР-эластомера. После снятия нагрузки тепловое движение возвращает макромолекулы из вытянутой формы в прежнюю равновесную, свернутую форму. Только такой механизм может объяснить постоянство объема при деформации, малое значение модуля упругости, большую величину и обратимость деформации. При деформации свернутой макромолекулы меняется взаимное расположение ее сегментов. Это приводит к изменению упорядоченности в системе, которое может быть охарактеризовано изменением энтропии.
При деформировании на dlМР-эластомера длиной l0 и объемом Vработа деформации равна fdl, где f– деформирующая сила. Из термодинамики известно, что для равновесного процесса деформирования (Т = const, V = const) изменение внутренней энергии эластомера равно
![]() , (1)
, (1)
где dA – работа деформации эластомера (dA = fdl);
T – абсолютная температура эластомера;
dS– изменение энтропии эластомера.
Энтропия S характеризует степень упорядоченности микроэлементов в системе, степень устойчивости данного состояния. При приложении силы к образцу эластомера и его деформировании энтропия уменьшается, при снятии нагрузки и возвращении МР-эластомера в исходное состояние энтропия снова увеличивается. Разупорядочивание элементов в МР-эластомере связано в основном с перемещением макромолекул относительно друг друга и изменением формы макромолекул из свернутых в более вытянутые.
Продифференцировав левую и правую части уравнения (1) по dl, найдем выражение для деформирующей силы f:
 . (2)
. (2)
Уравнение (2) дает общую картину изменения энергетического состояния МР-эластомера при его деформировании: меняется как его внутренняя энергия, так и энтропия. В определенных условиях, максимально приближенных к равновесным (Т = const, V = const), изменение внутренней энергии может быть незначительно и им можно пренебречь:
 . (3)
. (3)
В этом случае говорят, что эластомер ведет себя как идеальный. Для идеального эластомера напряжение, возникающее при деформации, обусловлено изменением энтропии и равно
 . (4)
. (4)
Выражение (4) имеет важнейшее значение для построения физической модели поведения эластомера под действием нагрузки: оно показывает, что изменение порядка в расположении элементов системы способно создать действующее напряжение [11].
Очень важно также, что изменение термодинамических параметров при деформации идеального эластомера качественно такое же, как и в идеальном газе. Действительно, для идеального газа при изотермическом сжатии давление увеличивается исключительно благодаря уменьшению энтропии, как и при изотермическом растяжении эластомера [11]:
 . (5)
. (5)
По аналогии с идеальным газом уравнение (4) называют уравнением состояния идеального эластомера. Если в идеальном газе или идеальном эластомере упругость обусловлена только изменением энтропии (порядка в расположении элементов системы), то в идеальном кристалле упругость определяется только изменением расстояний между узлами кристаллической решетки, что сопровождается для равновесного процесса деформирования (Т = const, V = const) соответствующим изменением внутренней энергии: f = ¶ U /¶ l при сохранении порядка в расположении элементов системы.
2 Экспериментальные исследования активного демпфера на основе МР-эластомера
Для исследований демпфера был разработан экспериментальный стенд, схема которого показана на рис. 1. Экспериментальный стенд содержит демпфер I на основе МР – эластомера и задатчик вибраций II. Задатчик вибраций – специальное устройство, позволяющее задавать гармонические колебания платформы с заданной частотой и амплитудой.
Демпфер содержит неподвижную опору 6, сердечник из магнитного материала 5, электромагнитную катушку 4, корпус 3, мембрану из магнитореологического (МР) эластомера 2 с жестким центром 1, которая образует с сердечником 5 воздушный зазор.
Устройство работает следующим образом: при подаче управляющего тока в электромагнитную катушку 4 в магнитопроводе возникает замкнутое магнитное поле. В мембране 2 формируется радиальное магнитное поле с индукцией, величина которой имеет максимум вблизи сердечника 1. Под действием этой магнитной индукции мембрана с жестким центром перемещается в осевом направлении в пределах воздушного зазора.
Принцип работы задатчика аналогичен работе демпфера: при подаче управляющего переменного тока в электромагнитную катушку 10 в магнитопроводе возникает замкнутое магнитное поле. В грузе 7 формируется радиальное магнитное поле с индукцией, величина которой имеет максимум вблизи сердечника 11. Под действием этой магнитной индукции груз перемещается в осевом направлении в пределах воздушного зазора.
Были получены экспериментальные данные по исследованию гистерезиса для трех образцов мембран МР-демпфера, различающихся объемной концентрацией магнитных частиц карбонильного железа (образец №2 - φV=0,24; образец №3 - φV=0,33; образец №5 - φV=0,40, где φV – объемная концентрация магнитных частиц).
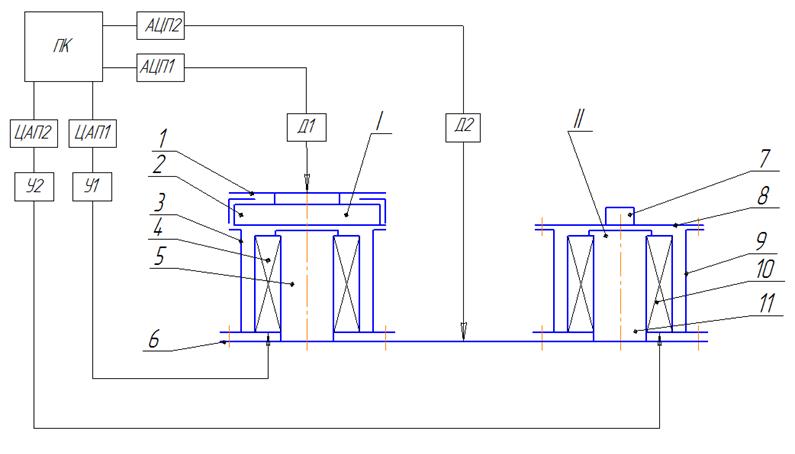
Рис. 1. Схема стенда для исследования активного МР-демпфера
На электромагнитную катушку МР-демпфера подавался управляющий ток, который сначала увеличивался от нулевого значения до максимального тока насыщения, а затем уменьшался до нуля. Диаметр сферических частиц из карбонильного железа в МР-эластомере от 1 до 10 мкм. Определены такие характеристики гистерезиса, как ток трогания МР-демпфера IТР, ток насыщения IНАС, остаточная деформация XОСТ, деформация насыщения XНАС. Эти характеристики определяют такие важнейшие параметры МР-демпфера, как зону нечувствительности, погрешность позиционирования, диапазон перемещения, эффективность поглощения энергии колебаний. Полученные зависимости представлены на рис. 2.
Ток трогания МР-демпфера IТР для исследованных образцов 2, 3 и 5 составил, соответственно, величины 1; 0,9 и 0,5 А. Таким образом, с увеличением концентрации магнитных частиц зона нечувствительности и погрешность позиционирования уменьшаются. Ток насыщения IНАС для всех образцов равен 2 А, деформация насыщения XНАС для указанных образцов составила значения 116; 160 и 169 мкм. Остаточная деформация XОСТ, определяющая ширину петли гистерезиса имеет величину 25; 21 и 80 мкм.
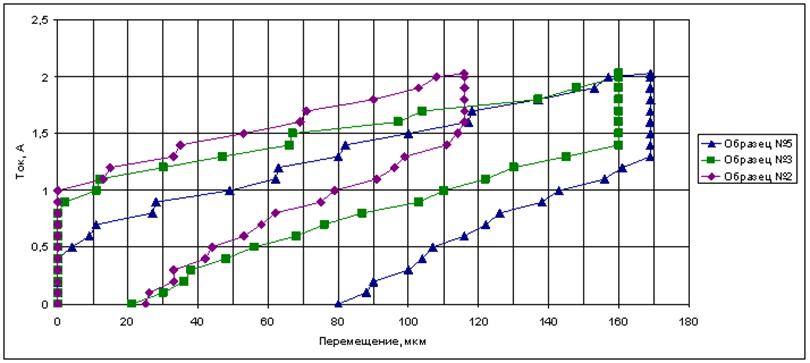
Рис. 2. Графики зависимости перемещений от управляющего тока для МР-демпфера
Энергия, поглощаемая при деформации МР-эластомера за один цикл колебаний, определяется площадью петли гистерезиса S (рис. 2). Она может быть определена как
 , (6)
, (6)
где f(I) – деформирующая сила, действующая на мембрану и однозначно определяющая управляющий ток (на рис. 2 приведен график зависимости перемещений от этого управляющего тока).
Площадь петли гистерезиса определяется разностью между работой, затраченной при нагружении мембраны и работой, полученной при ее разгрузке. Работа разгрузки отрицательна, т.к. она не затрачивается, а выделяется. Таким образом, площадь петли гистерезиса определяет эффективность поглощения энергии колебаний МР-демпфером. Эта энергия колебаний расходуется в МР-эластомере на изменение энтропии при необратимой вязкой деформации, на повышение температуры, на активацию химических процессов. Для исследованных образцов МР-демпфера площадь петли гистерезиса, определяемая управляющим током и деформацией, равна F2 = 1,01 ∙ 10-4 А∙м; F3 = 1,29∙10-4 А∙м; F5= 1,64 ∙ 10-4 А∙м. Таким образом, с ростом объемной концентрации магнитных частиц в МР-эластомере возрастает эффективность поглощения энергии колебаний демпфером.
На экспериментальной платформе были также проведены исследования зависимости коэффициента передачи амплитуды виброперемещений от управляющего тока для фиксированной частоты задатчика вибраций 100 Гц (рис. 3). Использование МР–эффекта позволяет регулировать коэффициент жесткости упругой мембраны за счет изменения величины магнитной индукции и, соответственно, частотные и точностные характеристики активного демпфера.

Рис. 3. График зависимости коэффициента передачи амплитуды виброперемещений МР-демпфера от управляющего тока
В полуактивном режиме работы МР-демпфера при подаче тока 0,3 А наблюдается резонанс системы. При этом коэффициент передачи виброперемещений имеет максимальное значение около 1,5 и амплитуда колебаний возрастает. При токе 1 А коэффициент передачи виброперемещений минимален (около 0,25), т.е. наблюдается эффективное гашение колебаний. При дальнейшем возрастании тока (более 1 А) происходит увеличение коэффициента передачи виброперемещений вследствие повышения жесткости мембраны.
Были также проведены исследования перемещения активного МР-демпфера с замкнутой системой управления. При проведении экспериментов осуществлялось перемещение демпфера в пошаговом режиме с интервалом 10 мкм при подаче ступенчатого управляющего сигнала на электромагнитную катушку 4 (рис. 1). Также изменялась нагрузка на жесткий центр 1 демпфера. На рис. 4 и 5 приведены соответственно графики перемещения МР-демпфера на 30 мкм (без нагрузки) и 70 мкм (1 Н). Установлено, что при увеличении нагрузки (1 Н) происходит снижение точности позиционирования вследствие возрастания силы статического сопротивления. Погрешность позиционирования без нагрузки – 5 мкм, с нагрузкой – 7 мкм. Такой режим перемещения активного МР-демпфера можно использовать для установки виброизолирующей платформы в заданное положение.

Рис. 4. График зависимости перемещения МР-демпфера от времени без нагрузки (диапазон перемещения 30 мкм)

Рис. 5. График зависимости перемещения МР-демпфера от времени с нагрузкой 1 Н (диапазон перемещения 70 мкм)
Заключение
1) Эффективность поглощения энергии колебаний МР-демпфером определяется работой, затрачиваемой на изменение энтропии при необратимой вязкой деформации эластомера, на повышение его температуры, на активацию химических процессов.
2) Энергия, поглощаемая МР-эластомером за один цикл колебаний, может быть определена площадью петли механического гистерезиса при деформации мембраны демпфера.
3) Эффективность демпфирования, характеризуемая способностью поглощать энергию колебаний, возрастает с увеличением объемной концентрации магнитных частиц в МР-эластомере. Это объясняется увеличением сил магнитного сцепления между слоями эластомера при необратимой вязкой сдвиговой деформации и подтверждается увеличением площади петли гистерезиса.
4) Коэффициент жесткости упругой мембраны из МР-эластомера может регулироваться за счет изменения величины магнитной индукции, обеспечивая тем самым регулировку частотных и точностных характеристик в полуактивном режиме работы МР-демпфера.
5) При увеличении нагрузки на МР-демпфер происходит снижение точности позиционирования вследствие возрастания силы статического сопротивления.
Работа выполнена при проведении НИР в рамках реализации ФЦП «Научные и научно-педагогические кадры инновационной России» на 2009 – 2013 годы.
Список литературы
- Быков В.А. Инструменты нанотехнологий сегодня и завтра // Наноиндустрия. 2010. Спецвыпуск. С. 10-14.
- Борисенко В.Е., Воробьева А.И., Уткина Е.А. Наноэлектроника. М.: БИНОМ. Лаборатория знаний, 2009. 223 с.
- Попов В.В., Салецкий А.М. Наномеханообработка. Возможности и перспективы // Российские нанотехнологии. 2008. № 9-10. С. 32-35.
- Сычёв В.В. Адаптивные оптические системы в крупногабаритном телескопостроении: монография. Старый Оскол: ООО “ТНТ”, 2005. 464 с.
- Камышный Н.И., Курчанова М.В., Логинов П.В. Система виброизоляции прецизионного технологического оборудования // Известия вузов. Машиностроение. 1988. № 10. С. 150-155.
- Михайлов В.П., Базиненков А.М., Зобов И.К., Шаков К.Г., Хвостов А.А. Системы точного позиционирования и активной виброизоляции для нанотехнологического оборудования // Наноинженерия. 2011. № 3. С. 47-57.
- Active Vibration Isolation. Accurion. Режим доступа: http://www.accurion.com (дата обращения 02.07.2012).
- Vibration Isolation Products. Minus K® Technology, Inc. Режим доступа: http://www.minusk.com (дата обращения 02.07.2012).
- Михайлов В.П., Базиненков А.М., Зобов И.К., Шаков К.Г. Магнитореологические устройства активной виброизоляции и позиционирования для прецизионного вакуумного оборудования // Вакуумная техника и технология. 2011. Т.21, № 3. С. 165-169.
- Горбунов А.И., Михайлов В.П., Степанов Г.В., Борин Д.Ю., Андриянов А.А., Темнов Д.В., Семеренко Д.А. Исследование свойств и новое применение магнитных силиконовых композитов // Вестник МГТУ им. Н.Э. Баумана. Сер. Машиностроение. 2008. № 1(70). С. 90-107.
- Гуль В.Е., Кулезнев В.Н. Структура и механические свойства полимеров: учеб. для хим.-технолог. вузов. М.: Лабиринт, 1994. 367 с.
Публикации с ключевыми словами: упругость, вязкость, гистерезис, демпфирование, магнитореологические эластомеры, активные виброизолирующие системы
Публикации со словами: упругость, вязкость, гистерезис, демпфирование, магнитореологические эластомеры, активные виброизолирующие системы
Смотри также:
- 77-30569/278409 Моделирование процесса взаимодействия абразивного зерна с поверхностью пластины
- Особенности математического моделирования движения абразивной частицы в процессе абразивно-экструзионной обработки
- Применение полимерных композиционных материалов в системах подрессоривания колесных машин
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||