научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 06, июнь 2012
DOI: 10.7463/0612.0440772
УДК62-752.4
Россия, МГТУ им. Н.Э. Баумана
Введение
Совершенствование систем управления и стабилизации летательных аппаратов в большой степени зависит от повышения точности и надежности измерителей пространственного движения объекта. Вместе с тем большая насыщенность современных транспортных средств бортовыми приборами ставит на повестку дня вопрос о миниатюризации электромеханических устройств, к которым относятся гироскопические приборы и системы. В настоящее время миниатюризация измерителей параметров пространственного движения объектов при сохранении достаточной точности является одним из основных направлений развития гироскопической техники.
Наиболее полно этим требованиям удовлетворяют вибрационные гироскопы, позволяющие создавать на их основе конструктивно простые, надежные и недорогие датчики. На вращающемся вокруг продольной оси носителе в качестве датчика угловой скорости носителя вокруг поперечных осей удобно использовать схему роторного вибрационного гироскопа (РВГ), а среди роторных вибрационных гироскопов наиболее простой и надежной является схема одноканального двумерного измерителя, возможность построения которого впервые была обоснована А.И. Сучковым [1].
На вращающемся носителе в таких гироскопах скорость вращения носителя вокруг продольной оси ![]() может использоваться для создания собственного кинетического момента гироскопа. Эта особенность позволяет отказаться от двигателя ротора в приборе, чем существенно уменьшить габариты, массу и стоимость гироскопа, значительно упростить конструкцию и технологический процесс его изготовления и повысить надежность прибора. Однако, наряду с указанными преимуществами большая нестабильность скорости вращения носителя вокруг продольной оси (10 ÷ 20 об/с) и ее малая величина, при которой величины кинетического момента не превышают сотых долей сНсмс, создают значительные трудности при разработке прибора и обеспечении требуемых точностных характеристик.
может использоваться для создания собственного кинетического момента гироскопа. Эта особенность позволяет отказаться от двигателя ротора в приборе, чем существенно уменьшить габариты, массу и стоимость гироскопа, значительно упростить конструкцию и технологический процесс его изготовления и повысить надежность прибора. Однако, наряду с указанными преимуществами большая нестабильность скорости вращения носителя вокруг продольной оси (10 ÷ 20 об/с) и ее малая величина, при которой величины кинетического момента не превышают сотых долей сНсмс, создают значительные трудности при разработке прибора и обеспечении требуемых точностных характеристик.
Известно [1, 2], что одноканальный двумерный измеритель, используемый на вращающемся носителе, представляет собой роторный вибрационный гироскоп, амплитуда и фаза выходного сигнала которого содержат информацию о векторе угловой скорости носителя в плоскости чувствительности, перпендикулярной оси вращения ротора, а, соответственно оси вращения носителя.
Особенностью роторного вибрационного гироскопа для вращающегося носителя является тот факт, что полезная информация об измеряемой угловой скорости содержится и в амплитуде и в фазе выходного сигнала, то есть в его мгновенном значении.
Совершенствование датчиков угловой скорости для вращающегося носителя с целью повышения их точности является актуальной задачей.
1. Постановка задачи
По причине узости сферы применения указанных датчиков их исследования в основном ограничиваются работами, проводимыми на кафедре ИУ2 МГТУ им. Н.Э. Баумана.
Так в работе [3] проведены результаты исследований, направленных на повышение точности РВГ для вращающегося носителя, и представлена схема (рис. 1) роторного вибрационного гироскопа с отрицательной обратной связью по скорости и интегрированием выходного сигнала (РВГ с ОС), позволяющая повысить точность измерения угловой скорости более, чем в восемь раз, рассмотрена работа данного прибора для случая постоянной измеряемой угловой скорости. На основании проведенных исследований показано, что применение РВГ и ОС на вращающемся носителе позволяет на порядок повысить точность измерения угловой скорости носителя вокруг поперечных осей.

Рис. 1. РВГ с демпфированием посредством обратной связи и с интегратором на выходе
Плоский неэлектропроводящий чувствительный элемент гироскопа (например, в виде рамки) крепится в одноосном свободном подвесе таким образом, чтобы его плоскость была перпендикулярна продольной оси вращения носителя. На чувствительном элементе размещены две электрические обмотки, помещенные в однородное магнитное поле. Одна из обмоток – чувствительная (ЧО), предназначена для измерения угловой скорости колебаний чувствительного элемента, другая – силовая (СО), обеспечивает моментное воздействие, пропорциональное угловой скорости колебаний. Для этого обмотки соединены между собой с помощью предварительного усилителя и усилителя тока. Сигнал, пропорциональный току J в силовой обмотке подается на интегратор, амплитуда и фаза выходного напряжения Uвых которого будут зависеть от угла α колебаний рамки.
Проведенные в работе [4] исследования показывают, что роторный вибрационный гироскоп для вращающегося носителя с отрицательной обратной связью и интегрированием выходного сигнала обладает повышенной точностью и при измерении переменной угловой скорости при угловых колебаниях носителя вокруг поперечных осей.
Одним из характерных движений вращающегося носителя являются круговые колебания его продольной оси. В связи с этим погрешности измерения роторным вибрационным гироскопом для вращающегося носителя угловой скорости круговых колебаний также требует исследований.
Таким образом, научная новизна заключается в том, что в данной статье впервые проведены исследования погрешностей РВГ с ОС для вращающегося носителя при измерении угловой скорости круговых колебаний носителя.
2. Основная часть
В общем виде движение чувствительного элемента определяется не только угловыми скоростями, но и угловыми ускорениями носителя. В соответствии с этим уравнение движения гироскопа имеет вид:
 (1)
(1)
где  - относительный коэффициент затухания колебаний чувствительного элемента,
- относительный коэффициент затухания колебаний чувствительного элемента,
 - собственная частота колебаний чувствительного элемента,
- собственная частота колебаний чувствительного элемента,
![]() - моменты инерции чувствительного элемента соответственно по осям чувствительности, колебаний и собственного вращения,
- моменты инерции чувствительного элемента соответственно по осям чувствительности, колебаний и собственного вращения,
![]() - частота вращения носителя вокруг продольной оси,
- частота вращения носителя вокруг продольной оси,
![]() - представляет собой проекцию угловой скорости носителя на плоскость чувствительности,
- представляет собой проекцию угловой скорости носителя на плоскость чувствительности,
![]() - представляет собой проекцию углового ускорения на плоскость чувствительности,
- представляет собой проекцию углового ускорения на плоскость чувствительности,
 - представляют собой углы, определяющие соответственно положение векторов угловой скорости и углового ускорения ракеты в плоскости чувствительности,
- представляют собой углы, определяющие соответственно положение векторов угловой скорости и углового ускорения ракеты в плоскости чувствительности,
Ωξ, Ωη - проекции угловой скорости носителя на оси опорного трехгранника (фактически трехгранника связанного с носителем и участвующим во всех его движениях кроме собственного вращения вокруг продольной оси),
Dα - коэффициент демпфирования.
Рассмотрим решение уравнения движения чувствительного элемента (1), предположив наличие гармонических составляющих в скоростях Ωξ, Ωη:

В последних выражениях углы δψ, δν, γψ и γν, определяют положение вектора абсолютной угловой скорости носителя относительно осей опорного трехгранника. Так углы δψ и δν, являются углами между вектором абсолютной угловой скорости носителя и плоскостью Оξη, перпендикулярной его продольной оси, а углы γψ и γν характеризуют положение проекции абсолютной угловой скорости на плоскость Оξη относительно осей Оξ и Оη. Все эти углы не влияют на поведение РВГ с ОС при круговых колебаниях носителя, поскольку вносят постоянное изменение либо в амплитуду, либо в фазу выходного сигнала гироскопа, а, следовательно, в дальнейших исследованиях могут быть приняты любыми.
В последнем выражении круговые колебания носителя описываются первыми слагаемыми, а угловые колебания – вторыми. Влияние угловых колебаний на поведение РВГ с ОС было рассмотрено в [4].
Рассмотрим поведение РВГ с ОС, установленного на вращающемся носителе, совершающем круговые колебания.
Для случая круговых колебаний получаем
Перепишем уравнение (1) для случая круговых колебаний носителя, обозначив

Пусть

Тогда после преобразований получаем
 (2)
(2)
Структурная схема рассматриваемого прибора [3,4] представлена на рис. 2.
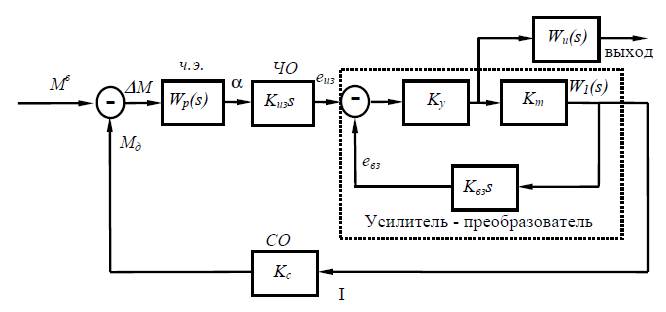
Рис. 2. Структурная схема роторного вибрационного гироскопа для вращающегося носителя с обратной связью по скорости
На рисунке 2 использованы следующие обозначения:
Мв – измеряемый инерционный момент, определяемый угловой скоростью носителя вокруг поперечной оси;
Мд – демпфирующий момент, создаваемый силовой обмоткой;
ч.э. – чувствительный элемент;
Wр(s) – передаточная функция чувствительного элемента

где

ξ0 - относительный коэффициент затухания колебаний чувствительного элемента, обусловленный только аэродинамическим демпфированием;
α – угол колебаний чувствительного элемента;
ЧО – чувствительная (сигнальная) обмотка;
Kиз – коэффициент передачи чувствительной обмотки;
еиз – э.д.с., наводимая в чувствительной обмотке;
Kу – коэффициент усиления предварительного усилителя;
Kт – коэффициент передачи усилителя тока;
Kвз – коэффициент взаимоиндукции;
евз – э.д.с. взаимной индукции чувствительной и силовой обмоток;
СО – силовая обмотка датчика момента;
Kс – коэффициент передачи силовой обмотки;
Wи(s) – передаточная функция интегратора с корректирующим звеном, необходимым для обеспечения стабильности фазовой характеристики при изменении скорости вращения носителя вокруг продольной оси

где KИ – коэффициент усиления интегратора,
Тд – постоянная времени корректирующего звена,
Ти – постоянная времени интегратора.
В соответствии со структурной схемой прибора передаточная функция замкнутой системы имеет вид
 (3)
(3)
где

Dос и ξ - коэффициент демпфирования и относительный коэффициент затухания колебаний, обусловленные отрицательной обратной связью по скорости,
![]() - постоянная времени усилителя-преобразователя,
- постоянная времени усилителя-преобразователя,
n - коэффициент, характеризующий точность компенсации влияния взаимной индукции силовой и чувствительной обмоток.
Установившееся значение выходного сигнала в таком случае определяет выражение

или выражение
![]() .
.
Приняв ξ0 = 0, и считая, что Тд – мала, Ти – велика, что действительно имеет место на практике, с учетом (3) получаем

Учитывая малость nTу, имеем
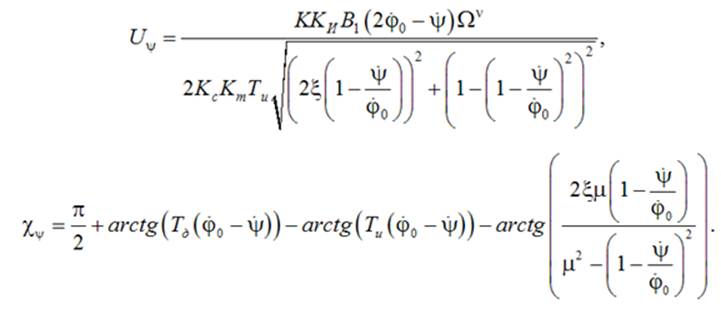
 (4)
(4)

Очевидно, что величина Uψ имеет зависимость не только от частоты круговых колебаний ![]() , но и от нестабильности скорости вращения носителя вокруг продольной оси, которая проявляется даже в резонансном режиме.
, но и от нестабильности скорости вращения носителя вокруг продольной оси, которая проявляется даже в резонансном режиме.
С учетом работы РВГ с ОС работает в близком к резонансному режиме [3, 4] величины Uψ и χψ определяются формулами
При частоте круговой вибрации ![]() = 0
= 0

что совпадает с выражением для амплитуды выходного сигнала, приведенного в работе [3], соответствующего наличию постоянной угловой скорости носителя.
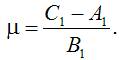
Используя значение коэффициента динамичности

из выражения (4) имеем

Рассмотрим в относительных величинах, каким образом частота круговых колебаний влияет на выходной сигнал. Для этого введем коэффициент

и используем коэффициент расстройки из [3,4]
Тогда

или
 (5)
(5)
График зависимости (5) при различных значениях коэффициента расстройки и коэффициента затухания представлен на рис. 3.

Рис. 3. Зависимость 
По характеру зависимостей, приведенных на рис. 3, можно отметить, что масштабный коэффициент прибора непропорционально и сильно зависит от частоты круговых колебаний. Физически вид графиков можно объяснить следующим образом. Графики на рис. 3 по характеру изменения соответствуют зеркально отраженной относительно вертикальной прямой при h = 0 зависимости коэффициента динамичности от частоты колебаний чувствительного элемента гироскопа. Прибор работает в зарезонансной области, но в непосредственной близости к резонансу. Поэтому с увеличением частоты круговых колебаний, а, следовательно, в соответствии с выражением (2) с уменьшением частоты колебаний чувствительного элемента, рабочая точка на графике коэффициента динамичности смещается влево. Сам коэффициент динамичности при этом растет, до тех пор, пока частота колебаний чувствительного элемента не станет равной резонансной частоте. Дальнейшее увеличение частоты круговых колебаний приводит к уменьшению коэффициента динамичности и уменьшению амплитуды выходного сигнала.
С увеличением коэффициента затухания резонансный пик уменьшается и график сглаживается. Также с увеличением коэффициента расстройки и уменьшением коэффициента затухания резонансный пик приближается к нулевому значению h, что объясняется тем же перемещением рабочей точки по графику зависимости коэффициента динамичности от частоты колебаний чувствительного элемента.
Согласно [5] частота круговых колебаний носителя не превышает десятой доли частоты вращения носителя вокруг продольной оси. Значит, при реальных круговых колебаниях носителя погрешности амплитуды выходного сигнала ограничиваются значениями, приведенными на рис. 4.

Рис. 4. Влияние круговых колебаний на амплитуду выходного сигнала РВГ
В отличие от случая угловых колебаний носителя [4] знак частоты круговых колебаний влияет на знак и величину погрешности масштабного коэффициента.
По аналогии с исследованиями точности РВГ с ОС при угловых колебаний носителя, для исследования точности измерения скорости круговых колебаний в связанной системе координат следует рассматривать не масштабный коэффициент прибора, а зависимость выходного сигнала от входного воздействия на чувствительный элемент, которое для случая круговых колебаний имеет вид
![]()
Отношение амплитуд выходного сигнала и входного воздействия выражается формулой

Отнесем полученное выражение к его величине при нулевой частоте круговых колебаний:
 (6)
(6)
Таким образом, частотная зависимость отношения амплитуд выходного сигнала и входного воздействия определяется только значением коэффициента динамичности. Отметим отличие выражения (6) от выражения (5), в котором присутствует еще один сомножитель, одно из слагаемых в котором тоже определяется величиной частоты круговых колебаний. Из сравнения двух этих выражений можно сделать вывод о большем влиянии круговых колебаний носителя на амплитуду выходного сигнала в выражении (6), что следует и из сравнения графиков на рис. 4, соответствующих выражению (5), и графиков рис. 5, соответствующих выражению (6).

Рис. 5. Отношение амплитуд выходного сигнала гироскопа и входного воздействия на него при круговых колебаниях носителя
![]() Наличие круговых колебаний вносит также значительные фазовые сдвиги в показания прибора. На рис. 6. представлена фазовая характеристика прибора
Наличие круговых колебаний вносит также значительные фазовые сдвиги в показания прибора. На рис. 6. представлена фазовая характеристика прибора

с учетом компенсации постоянного фазового сдвига поворотом корпуса прибора, т.е. за вычетом χψ(![]() =0).
=0).

Рис. 6. Влияние круговых колебаний на фазу выходного сигнала РВГс ОС
Очевидна аналогия с влиянием нестабильности скорости вращения носителя, отмеченная в [3], а, следовательно, правильное определение Тд значительно уменьшает влияние ![]() на фазу выходного сигнала.
на фазу выходного сигнала.
В рассматриваемом диапазоне частот круговых колебаний влияние коэффициента расстройки на фазу выходного сигнала много меньше, чем влияние коэффициента затухания колебаний. Увеличение крутизны фазовой характеристики на рис. 6.б с уменьшением коэффициента затухания объясняется более резким изменением фазы колебательного звена при переходе через точку частоты собственных недемпфированных колебаний, которая в данном случае при μ=0,9 находится в непосредственной близости к точке h=0.
Заключение
На основе полученных результатов можно заключить, что уменьшения погрешностей прибора при наличии у носителя круговых колебаний можно достичь только путем увеличения демпфирования в приборе и более точной настройкой в резонанс.
Список литературы
1. Сучков А.И. Гироскопический измеритель угловой скорости : а. с. № 108731 СССР. – 1957. – Бюлл. № 12.
2. Хорол Д.М., Барский А.Г., Орлова М.С. Динамические системы с одноканальными измерителями. – М.: Машиностроение.- 1976.- 208 с.
3. Фатеев В. В., Подчезерцев В.П., Лютый М.Н. Вибрационный датчик угловой скорости // Вестник МГТУ им. Н.Э.Баумана. Сер. Приборостроение. – 1999. – Спец. вып. Системы управления.- С. 59 – 68.
4. Фатеев В.В., Кулешов А.В., Носов Н.А. Поведение роторного вибрационного гироскопа для вращающегося носителя при наличии угловых колебаний // Вестник МГТУ им. Н.Э.Баумана. Сер. Приборостроение. – 2002. - № 3.- С. 81 – 93.
5. Горин В.И., Распопов В.Я. Гирокоординаторы вращающихся по крену ракет. - М.: НТЦ «Информтехника».- 1996.- 151 с.
Публикации с ключевыми словами: роторный вибрационный гироскоп, вращающийся носитель, круговые колебания
Публикации со словами: роторный вибрационный гироскоп, вращающийся носитель, круговые колебания
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||