научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 06, июнь 2012
DOI: 10.7463/0612.0415299
УДК 621.313.004.67.72
Россия, МГТУ им. Н.Э. Баумана
Введение
При современном состоянии проблемы функционирование систем автоматической регулировки возбуждения (АРВ) на энергетических объектах далеко от совершенства. Основной угрозой стабильности энергосистем в локальных и глобальных масштабах являются электромеханические переходные процессы, возникающие вследствие локальных коротких замыканий, перенапряжений, быстрого изменения соотношения потребляемой активной и реактивной мощностей в сети и т.п. Для защиты энергосистемы от дисбаланса, уменьшения величины и длительности переходных процессов и, следовательно, повышения качества электроэнергии у конечного потребителя необходима настройка параметров АРВ машин, входящих в энергосистему, в соответствии с ее текущими электрическими характеристиками. Следовательно, задача адаптации параметров систем АРВ электрических машин в настоящее время имеет высокую актуальность, обоснованную экономическими и техническими предпосылками, а проводимые в работе исследования, связанные с разработкой новых методов создания регуляторов возбуждения синхронных электрических генераторов, обладают научной новизной.
Основная цель работы заключается в обосновании метода построения регулятора возбуждения синхронных электрических генераторов, обеспечивающего оптимизацию величины и длительности переходных процессов в сопряженной энергосистеме в процессе функционирования.
В системах управления возбуждением синхронных электрических генераторов для построения каналов регулирования по напряжению статора, по производной тока возбуждения и по скольжению набольшее распространение получили пропорционально-интегральные (ПИ) и пропорционально-интегрально-дифференциальные (ПИД) регуляторы [1, 5], в т.ч. и адаптивные, благодаря высокой эффективности управления, возможности функционировать в условиях быстрого изменения собственных параметров, возможности управления с минимально возможной среднеквадратичной ошибкой (при ![]() ), не требуют априорных данных о точной модели управляемого процесса.
), не требуют априорных данных о точной модели управляемого процесса.
ПИД-регулятор обычно применяется для быстродействующих контуров регулирования с относительно малым уровнем шумов, к которым относятся системы АРВ, и может обеспечить высокое качество регулирования: рассогласование регулирования E < 1 % (от заданной точки), малое время выхода на режим и невысокую чувствительность к внешним возмущениям. Это условие выполняется только при его оптимальных настройках параметров.
Обзор состояния вопроса. На сегодняшний день разработан широкий спектр методов настройки параметров регуляторов указанного типа, например: по переходной характеристике (реакции на единичное ступенчатое воздействие); метод Нишикавы (минимизация взвешенной среднеквадратической ошибки отклика на испытательный сигнал), метод, основанный на формировании замкнутого цикла и т.п. [1, 2]. Однако, наряду с указанными достоинствами, ПИ-и ПИД- регуляторы обладают рядом недостатков. Так, если рабочая точка процесса изменяется вследствие изменений в объекте управления (системе), параметры контроллера требуется перенастраивать вручную, чтобы получить новую оптимальную настройку. Настройка должна выполняться опытным оператором. Для систем с взаимодействующими контурами, таких как, например, АРВ, эта процедура может быть сложной и занимать много времени. Кроме того, для процессов с переменными параметрами, временными задержками, существенными нелинейностями и значительными помехами использование ПИ- и ПИД-регуляторов может не обеспечить оптимальных характеристик.
Известные методы настройки ПИ- и ПИД-регуляторов также имеют ряд недостатков. Например, известный метод Зиглера-Никольса [2] чувствителен к возмущениям, так как разработан на основе экспериментов с разомкнутыми системами. Метод Нишикавы подразумевает человеко-машинное взаимодействие, в ходе которого оператор должен генерировать входные сигналы каждый раз, когда требуется изменение параметров с целью адаптации к изменению динамики процесса.
Минимальная величина и длительность переходных процессов при внешних по отношению к управляемой системе возмущениях, а также ее статическая и динамическая устойчивость достигается при оптимальных настройках (параметров) входящих в нее регуляторов.
В существующих системах управления возбуждением электрических генераторов оптимизация параметров регуляторов, входящих в состав системы АРВ, производится на этапе ввода в эксплуатацию и при повторных пусках. При этом коэффициенты усиления и постоянные времени, влияющие на устойчивость регулирования, величину и длительность переходных процессов, задаются вручную, исходя из накопленного опыта, интуиции оператора и визуального, зачастую оценочного, анализа параметров переходного процесса. Настройки регулятора также зависят от ряда параметров управляемого им генератора, которые могут варьироваться среди образцов в одной партии. Для задания параметров регулирования, близких к оптимальным, требуется большое количество итераций по настройке регулятора, влекущие существенные временные затраты с привлечением высококвалифицированных специалистов.
Место работы среди известных работ. По изложенным причинам в настоящее время большое внимание уделяется исследованиям в области реализации управления возбуждением электрических генераторов с самонастройкой, в котором параметры регулятора настраивались бы в оперативном режиме, например, на основе фильтра Калмана и др. [2, 3]. Известен ряд работ в области оптимизации параметров АРВ на основе методов нечеткой логики [6] и нейро-нечетких моделях [7 - 9], робастных [10], нейросетевых авторегрессионных [11 - 14] и синергетических методов [15, 16]. В известных на сегодняшний день работах, исследующих методы адаптации параметров АРВ с использованием нейросетевых технологий, например, [12, 13], рассматривается только системный стабилизатор. Предлагаемый в настоящей работе подход к построению системы АРВ заключается в адаптации параметров всех регуляторов (по напряжению, скольжению и производной тока возбуждения), входящих в ее состав, к параметрам энергосети и электрической машины на основе идентификации объекта управления посредством нейросетевых технологий и непрерывного дообучения в процессе функционирования. Суть впервые предлагаемого подхода заключается в разделении процесса адаптации параметров АРВ на два основных этапа: оптимизация параметров идентификационной модели и нахождение параметров регуляторов, близких к оптимальным. В результате чего обеспечиваются близкая к минимальной величина и длительность переходных процессов, происходящих в энергосистеме.
Краткое содержание работы по разделам. В первом разделе работы приведено обоснование методики адаптации параметров регулятора для управления возбуждением синхронных электрических генераторов на основе исследования известных методов. Второй раздел посвящен обоснованию структуры идентификатора исследуемой энергосистемы. В третьем разделе изложены вопросы оптимизации параметров регуляторов, входящих в состав АРВ. Четвертый раздел посвящен практическому исследованию разработанной методики, где изложены основные результаты и представлены рабочие характеристики, полученные в результате оптимизации параметров АРВ при помощи математического моделирования. В заключении к работе сформулирована разработанная методология построения системы управления возбуждения синхронных электрических генераторов.
1 Обоснование методики адаптации параметров регулятора для управления возбуждением синхронных электрических генераторов
Основной задачей предлагаемого исследования является разработка метода построения адаптивной системы АРВ синхронных генераторов.
Адаптивные системы можно разделить на два больших класса [3]: самоорганизующиеся и самонастраивающиеся.
Самоорганизующиеся системы обладают признаками: стохастичностью поведения, нестационарностью отдельных параметров и процессов и находят применение в системах управления объектами не только с неизвестными параметрами, но и с априорно неизвестной структурой. Для систем указанного типа характерна непредсказуемость поведения в нетипичных ситуациях [3], к которым относятся переходные режимы, что вцелом не приемлемо для систем АРВ.
В классе самонастраивающихся систем обобщенная структура регулятора задана (заранее выбрана) и требуется определить лишь алгоритм настройки его параметров (алгоритм адаптации). Самонастраивающиеся системы делятся на два подкласса: поисковые и беспоисковые [3].
Поисковые самонастраивающиеся системы традиционно применяются для управления мало- или безынерционными объектами [3]. При адаптивном управлении в указанных системах критерий качества оптимизируется посредством подачи специально организованных поисковых воздействий и отслеживании реакции на них посредством изменения целевой функции оптимизации. Поисковым системам присуща многоэкстремальность при адаптации и сложность аппаратной реализации [3]. Для применения поисковых СНС необходима полная адекватность структурной идентификационной модели объекту управления. В противном случае, особенно в условиях воздействия нерегулярных случайных возмущений, что имеет место в энергосистемах, а также отсутствии априорных знаний о параметрах объектов указанный метод не обеспечивает нахождения глобального экстремума целевой функции поиска.
Построение полностью адекватной аналитической модели объекта управления – обобщенной энергосистемы возможно только для конкретного сочетания объектов генератор - система возбуждения - энергосеть. Для различных типов синхронных генераторов (что, прежде всего, относится к электрическим машинам различной мощности) модель Парка-Горева является до определенной степени приближением и не учитывает весь спектр происходящих в них процессов. При уточнении модели электрического генератора (например, для явнополюсных машин) количество дифференциальных уравнений, описывающих энергосистему, увеличивается в разы. Энергосети также подвержены структурным изменениям за счет ввода новых потребителей и т.п.
В энергетических системах применение поисковых сигналов возможно только на этапе ввода оборудования в эксплуатацию. Воздействие на систему может осуществляться в малом диапазоне изменения величин сигналов электрического генератора (порядка 10% от номинальных значений), в противном случае резко возрастает риск выхода параметров оборудования за пределы штатного режима работы. Благодаря высокой инерционности объекта управления сужается функциональный диапазон подаваемых воздействий.
Поэтому для решения задачи адаптивного регулирования возбуждения синхронных электрических генераторов представляется возможным использование беспоисковых самонастраивающихся систем.В последних в явном или неявном виде строится модель объекта управления с заданными динамическими характеристиками [3]. Задача адаптации состоит в настройке параметров регулятора таким образом, чтобы свести рассогласование между объектом управления и моделью к минимуму.
Для решения поставленной задачи перспективно использование метода непрямого адаптивного управления, в котором контуры адаптации оказывают воздействие только на точность определения параметров регулятора заданной структуры и не воздействуют на динамику системы управления. При этом ошибки идентификации объекта управления вносят вклад в качество управления. Указанный метод включает два основных этапа: идентификация объекта управления и вычисление параметров регулятора.
Теоретически общепринятый классический подход к решению задачи синтеза идентификационной модели (идентификатора) объекта управления, оптимальной в силу заданного критерия, по результатам наблюдений над входными и выходными сигналами системы состоит из следующих этапов [3]:
1) Планирование / проведение эксперимента и предварительная обработка экспериментальных данных.
2) Выбор структуры идентификатора.
3) Оценка (оптимизация) параметров (обучение) идентификатора.
4) Принятие решения об адекватности модели идентификатора.
Основной задачей этапа планирования / проведения эксперимента при идентификации является формирование обучающей выборки во всем диапазоне изменения входных сигналов системы с учетом рабочих режимов. Полнота и достоверность данных во многом определяют качество идентификации. Значения входных и выходных сигналов могут регистрироваться в процессе проведения целенаправленных идентификационных экспериментов, когда исследователь может определить перечень и моменты измерения сигналов, причем некоторые из входных сигналов могут быть управляемыми. Задача планирования экспериментов, таким образом, состоит в том, чтобы, учитывая возможные ограничения, выбрать максимально информативные данные о сигналах системы. В ряде случаев исследователь может быть лишен возможности влиять на ход эксперимента и должен опираться на данные наблюдений в режиме нормальной эксплуатации.
На этапе планирования / проведения эксперимента также производится рациональный выбор частоты дискретизации сигналов, синтез тестовых сигналов; фильтрация экспериментальных данных.
Основными факторами, осложняющими проведение экспериментов в реальных действующих энергетических системах, являются:
- энергосистема постоянно находится в режиме функционирования; нет возможности изменять конфигурацию сети, обусловленную изменением параметров потребителей мощности;
- узость диапазонов изменения входных (тестовых) и выходных сигналов (для входных сигналов – единицы, для входных - десятки процентов от номинальных величин), за пределами которых происходит срабатывание систем безопасности и контроля параметров энергетической установки, защищающих последнюю от аварийных режимов;
- практически полное отсутствие возможности постановки экспериментов с подачей тестовых воздействий в полнофункциональных режимах работы энергосистемы с включенными фидерами потребителей, благодаря нарушение требований к качеству электроэнергии у конечных потребителей;
- узость диапазона форм сигналов тестовых воздействий в силу инерционности процессов, протекающих в системах управления, в т.ч., системе возбуждения электрического генератора.
- значимые для эксперимента переходные процессы в действующих энергосистемах являются относительно редким явлением, повторяющиеся со средним интервалом десятки минут, часы, что осложняет сбор статистически состоятельного множества данных (параметров сигналов), необходимых для идентификации.
На основании отмеченного можно сделать вывод о том, что для формирования обучающей выборки на этапе планирования / проведения эксперимента наиболее рационально использовать имитационное моделирование с учетом знаний статистических характеристик входных сигналов и параметров переходных процессов (например, величины и длительности), в различных режимах функционирования энергосистемы полученных в результате натурных экспериментов и измерений.
Для синтеза обучающей выборки посредством имитационного моделирования немаловажным аспектом является адекватность используемой модели энергосистемы.
2 Выбор структуры идентификатора
Выбор структуры модели идентификатора является наиболее важным и трудоемким этапом процедуры идентификации. На данном этапе знание формальных свойств моделей сопоставляется с априорной информацией об управляемом объекте. Основой для этого служит опыт и интуиция исследователя, а также возможность качественного аналитического обоснования эквивалентности свойств идентификационной модели и объекта управления.
Множество моделей-кандидатов устанавливается посредством отбора группы моделей, соответствующих описанию исследуемой системы (например, NARX модели). Далее общая форма представления модельной структуры конкретизируется на основе сведений об общей динамике системы, определяется структура векторов входных и выходных сигналов, количество отводов обратной связи и другие параметры. При использованиинейросетевых моделей производится задание внутренней структуры - числа скрытых слоев и количества нейронов в каждом скрытом слое.
Для идентификации физически реализуемых объектов, в т.ч. энергосистем, на основе измеренных входных и выходных сигналов перспективно применение аппарата рекуррентных нейронных сетей.
Нейронные сети, кроме возможности аппроксимации сложных нелинейных зависимостей, обладают важнейшими свойствами самообучения и адаптации. Аппарат рекуррентных нейронных сетей позволяет осуществлять идентификацию инерционных нелинейных динамических объектов, включая электрические машины, состояние которых зависит не только от текущих входных воздействий, но и от предыдущих состояний [5].
Помимо указанных свойств нейронная сеть, применяемая для идентификации энергосистем, обладает существенными преимуществами: регулярностью и неизменностью структуры нейросетевого идентификатора (вида нейронов, количества слоев, размерности входного и выходного вектора) при вариациях структуры и параметров модели управляемого объекта (электрического генератора и энергосети), а также возможностью дообучения (повторной оптимизации собственных параметров) в процессе функционирования последнего. Изменению подлежит только количество нейронов в скрытых слоях.
Нейросетевой идентификатор содержит набор внутренних параметров (весовых коэффициентов), оптимизируемых при обучении. Указанные параметры обученного идентификатора (нейросети) неявным образом отображают свойства идентифицируемого объекта (энергосистемы).
Из теории нейронных сетей известно [5], что трехслойный персептрон с обратной связью способен идентифицировать физически реализуемый объект любой сложности. С увеличением количества нейронов в скрытых слоях способность идентификации не утрачивается. Модель становится избыточной, что, приводит к увеличению дисперсии ошибки идентификации.
Алгоритм обучения (оптимизации параметров) нейросетевого идентификатора и реализующие его технические средства (программное и/или аппаратное обеспечение) вследствие постоянства структуры последней в указанных условиях также остаются неименными, что обеспечивает единство методологии решения поставленной задачи. В настоящее время для оптимизации параметров (обучения) широкого спектра нейронных сетей наработан мощный теоретический и практический задел, разработаны программные средства (NeuralToolbox в составе пакета MATLAB и др.) Например, для оптимизации параметров нейросетевых идентификаторов на основе NARX-модели используются методы обратного распространения во времени, имитации отжига и другие [2]. Процесс обучения при этом подлежит систематизации и автоматизации, полностью исключает субъективный фактор и не требует проведения оценочных расчетов начальных условий параметров идентификатора.
Таким образом, для идентификации исследуемой энергосистемы как объекта управления актуально применение аппарата искусственных нейронных сетей, позволяющих решать поставленную задачу при структурном и количественном изменении параметров исследуемого объекта без собственных качественных структурных изменений идентификатора, а также обладающих возможностью дообучения.
На этапе оценки модели производится обоснование выбора структуры идентификатора (для нейронных сетей – количество нейронов в скрытых слоях, количество скрытых слоев и т.п.) и его соответствия требованиям по качеству идентификации посредством оптимизации параметров (обучения) согласно заданному критерию.
Заключительным этапом синтеза идентификационной модели является принятие решения о ее адекватности. Построенный идентификатор должен быть адекватен реальной системе и условиям применения. Установление адекватности модели требует непосредственного участия исследователя. Если полученная модель не удовлетворяет какому-либо критерию, то повторяются предыдущие этапы процедуры идентификации, вплоть до проведения новой серии экспериментов. В качестве меры адекватности, как правило, принимается критерий, непосредственно связанный с целевой функцией обучения идентификатора. Часто в качестве указанного критерия выступает среднеквадратическая ошибка. Проверка качества идентификации производится как на обучающем множестве, так и на сигналах, полученных в натурных условиях.
При использовании в качестве идентификатора нейросетевых модельных структур проблема отсутствия или недостаточности адекватности может быть решена путем выбора заведомо избыточной модельной структуры, которая впоследствии подвергается структурной оптимизации, что влечет за собой дополнительный этап.
3 Оптимизация параметров регулятора
Заключительным этапом синтеза адаптивного АРВ является разработка процедуры вычисления значений его параметров, удовлетворяющих заданному критерию качества регулятора или переходного процесса.
Если ![]() – выбранный функционал качества регулятора (показатель качества переходного процесса), то вектор оптимальных параметров АРВ
– выбранный функционал качества регулятора (показатель качества переходного процесса), то вектор оптимальных параметров АРВ ![]() определяется как
определяется как
![]() . (1)
. (1)
В результате успешного решения задачи идентификации на первом этапе в каждый момент времени набор параметров идентификатора содержит информацию о структуре энергосистемы и значениях ее параметров, т.е. о текущем состоянии энергосистемы.
Можно предположить, что для каждого неизменного состояния энергосистемы существует набор оптимальных параметров регуляторов, входящих в систему АРВ, обеспечивающих выполнение (1), например, минимум величины и длительности переходных процессов.
В общем случае задача вычисления параметров регулятора сводится к синтезу многомерной функциональной зависимости, ставящей в соответствие каждому набору параметров нейросетевого идентификатора (весовых коэффициентов) набор параметров регуляторов, входящих в состав системы АРВ, и может быть решена любым из методов аппроксимации, например, методом наименьших квадратов, при помощи нейронной сети, а также другими методами оптимизации параметрических функциональных зависимостей.
Решение данной задачи осложнено тем, что для получения точной аппроксимации указанной функциональной зависимости требуется состоятельная обучающая выборка, охватывающая полный диапазон области существования параметров идентификатора, формирование которой, равно как и оптимизация параметров аппроксиматора занимает неоправданно длительное время. Также в силу того, что аппроксимирующая функция является многомерной, субъективно определить ее вид чрезвычайно сложно.
В силу отмеченного возможно использование другого подхода, основанного на поиске оптимальных параметров регуляторов в силу оптимизации заданного критерия качества управления.
При дискретной реализации упомянутый выше аппроксиматор параметров идентификатора гипотетически может быть представлен в виде постоянного запоминающего устройства (таблицы), на вход которого подаются значения параметров идентификатора, а с выхода снимаются значения оптимальных параметров регуляторов. При этом значения указанных коэффициентов могут определяться, например, на основе проведения эксперимента по оптимизации целевой функции – выбранного критерия, функционала качества регулятора. Решение данной задачи упрощается тем, что в качестве энергосистемы используется ее идентификатор – модель с известными параметрами, в обратную связь которой включена система АРВ также известной структуры.
На рисунке 1 приведена обобщенная схема исследуемой системы (в данном контексте под системой подразумевается совокупность объектов энергосистемы, включающая в себя систему возбуждения, электрический генератор и энергосеть).

Рисунок 1 – Обобщенная схема исследуемой системы
Пусть ![]() – вектор внешних сигналов энергосистемы,
– вектор внешних сигналов энергосистемы, ![]() – вектор выходных сигналов АРВ,
– вектор выходных сигналов АРВ, ![]() – вектор выходных сигналов энергосистемы,
– вектор выходных сигналов энергосистемы, ![]() – вектор настраиваемых параметров АРВ, где
– вектор настраиваемых параметров АРВ, где ![]() ,
, ![]() , причем, fS – нелинейная функция. Тогда при условии постоянства параметров энергосистемы за время оптимизации параметров регулятора:
, причем, fS – нелинейная функция. Тогда при условии постоянства параметров энергосистемы за время оптимизации параметров регулятора:
![]()
Следовательно, один из способов решения задачи нахождения параметров регулятора сводится к оптимизации нелинейной рекуррентной функции. Для каждого набора параметров идентификатора возможно путем решения оптимизационной задачи определить неизвестные параметры рассмотренной замкнутой системы – набор коэффициентов регулятора.
Как известно, задача оптимизации параметров регулятора может быть решена любым известным методом. Наиболее быструю сходимость дают градиентные методы. Однако для их использования требуется полная информация о структуре нейросетевого идентификатора (количестве нейронов в скрытых слоях, виде активационной функции) и жесткая привязка к структуре регуляторов. При этом теряется общность подхода. Кроме того, градиентные методы склонны к достижению локальных экстремумов целевой функции.
Поэтому для решения указанной задачи возможно использование методов стохастической оптимизации, например, имитации отжига [5]. Для этого необходимо вычислить значения требуемого функционала качества. Основным недостатком данных методов, как известно, является медленная, логарифмическая сходимость. Преимущества методов заключаются в независимости от структуры идентификатора и регуляторов, а также сходимость к глобальному экстремуму целевой функции.
4 Практическое исследование разработанной методики оптимизации параметров АРВ
На рисунке 2 представлена функциональная схема идентификатора исследуемой энергосистемы, модель которого была разработана в рамках решаемой задачи.
Проверка разработанной методики осуществлялась методом математического моделирования при помощи специально разработанного для этих целей программного обеспечения.
В качестве входных сигналов идентификатора использовались напряжение сети Ul, напряжение регулятора Uf, момент турбины Mt; в качестве выходных – ток возбуждения If, напряжение генератора Ug, активная мощность P, реактивная мощность Q и скольжение S.
При моделировании использовались параметры серийного электрического генератора ТК-6-2-РУ3 мощностью 6МВт, оснащенного диодной независимой системой возбуждения. Исходный режим работы – номинальный.

Рисунок 2 – Функциональная схема идентификатора исследуемой энергосистемы
Моделирование проводилось для режимов удаленного короткого замыкания и автономной работы [4].
Нахождение требуемой аппроксимации переходных процессов осуществлялось путем обучения нейронной сети. Величина коррекции синаптических коэффициентов вычислялась на основе среднего квадрата ошибки. С целью уменьшения объема обучающей выборки входные и выходные сигналы идентифицируемой системы подвергались прореживанию.
Для решения задачи идентификации исследуемой энергосистемы использовалась модель идентификатора NARX следующей конфигурации (топология сети была подобрана экспериментально по характеристикам обучаемости):
- количество скрытых слоев: 2;
- количество нейронов во входном слое: 80;
- количество нейронов в первом скрытом слое: 50;
- количество нейронов во втором скрытом слое: 50;
- количество нейронов в выходном слое: 5;
- количество внешних входов: 3;
- количество входов обратной связи: 5;
- количество отводов в линии задержки (по внешним входам, и по входам обратной связи): 10;
- функция активации нейронов: гиперболический тангенс.
Нейронная сеть обучалась с использованием алгоритма обратного распространения ошибки в последовательном режиме. Обучающая выборка состояла из 10000 реализаций (частота дискретизации – 100 Гц).
Каждая реализация представляет собой набор входных сигналов и набор задержанных выходных сигналов идентифицируемой системы.
При обучении использовалось подкрепление учителем – вместо задержанных выходных сигналов нейронной сети на ее вход подавались задержанные выходные сигналы имитационной модели.
Параметры обучения:
- скорость обучения: 10-4;
- количество реализаций: 1000.
Из результатов проведенных экспериментов по обучению нейросетевого идентификатора с использованием алгоритма обратного распространения ошибки в последовательном режиме установлено, что идентификация исследуемой энергосистемы указанным методом достигается с относительно высокой скоростью (примерно 1000 итераций) и точностью (остаточная среднеквадратическая ошибка 2,5 %).
При параллельно-последовательной схеме идентификации на входы обратной связи нейросети вместо выходных сигналов подаются сигналы имитационной модели. Теоретически это соответствует обучению нейросети, подкрепленному учителем.
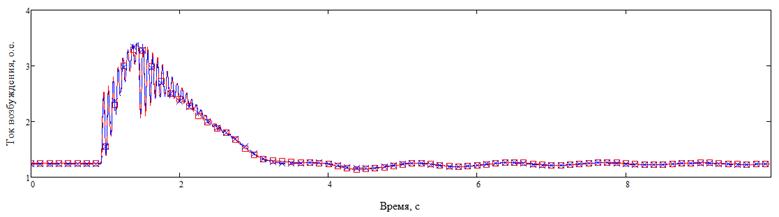
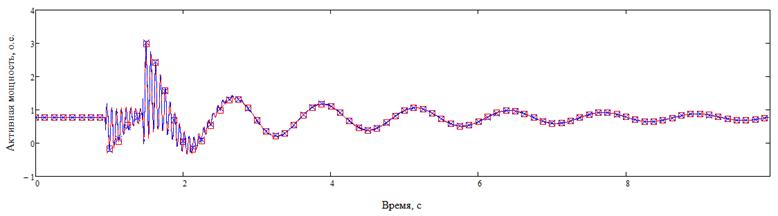
На рисунке 3 представлены осциллограммы входных и выходных сигналов из обучающего множества, иллюстрирующие решение задачи параллельно-последовательной идентификации объектов энергосистемы. Пунктиром показаны выходные сигналы имитационной модели энергосистемы, а сплошной линией – выходные сигналы нейронной сети.
а)

б)
в)

г)

д)
Рисунок 3 – Осциллограммы выходных сигналов нейросети и имитационной модели энергосистемы для параллельно-последовательной схемы идентификации: а) – ток возбуждения; б) - напряжение генератора; в) – активная мощность; г) – реактивная мощность; д) – скольжение
Анализ полученных статистических характеристик показывает, что точность аппроксимации переходных процессов, происходящих в энергосистеме, нейросетевым идентификатором позволяет воспроизводить длительность переходного процесса и величину перерегулирования с точностными характеристиками: длительность – с точностью до десятых долей секунды; перерегулирование – с точностью порядка единиц процентов.
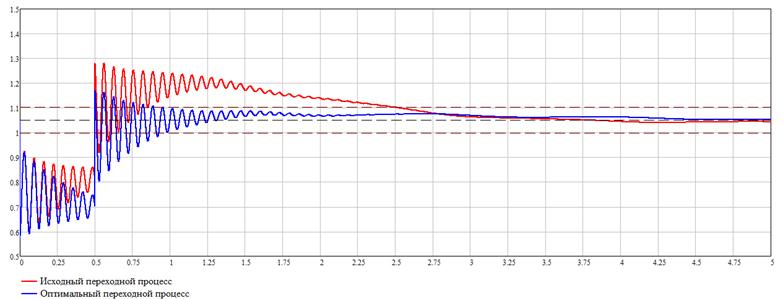
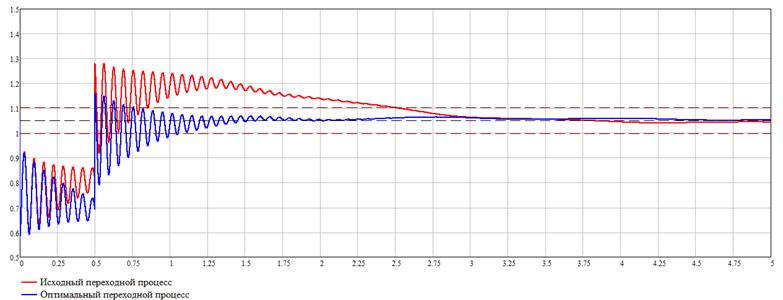
При помощи обученного нейросетевого идентификатора производилась оптимизация параметров АРВ по критериям: минимума длительности переходного процесса и минимума перерегулирования в режиме короткого замыкания при помощи алгоритма имитации отжига. На рисунке 4 приведены осциллограммы переходных процессов в энергосистеме до и после оптимизации параметров АРВ.
а)
б)
Рисунок 4 – Осциллограммы переходных процессов в энергосистеме, оптимизированных по критериям: а) - минимума длительности; б) - минимума перерегулирования
Практическое исследование параметров переходных процессов в энергосистеме, показало, что длительность переходного процесса была сокращена на 10 %, перерегулирование – примерно на 9 % относительно указанных параметрах переходного процесса, полученного при установке практически используемых величин параметров АРВ, что обуславливает существенный качественный эффект в автоматическом регулировании возбуждения от использования разработанной методики.
Заключение
На основании изложенного можно сформировать следующую методологию построения системы управления возбуждения синхронных электрических генераторов.
1) Система управления может быть построена на основе применения традиционных регуляторов по напряжению, производной тока возбуждения и по скольжению (ПИД и ПИ звенья) с изменяемыми параметрами. Указанные регуляторы инвариантны к модели управляемого процесса, обладают возможностью функционирования в условиях быстрого изменения собственных параметров и при использовании параметров, близких к оптимальным, обеспечивают высокое качество регулирования.
2) Предлагаемый в работе подход к построению системы АРВ заключается в адаптации параметров регуляторов (по напряжению, скольжению и производной тока возбуждения), входящих в ее состав к параметрам энергосистемы (энергосети, электрической машины и системы возбуждения) посредством непрерывного дообучения в процессе функционирования последней. В результате регулятор в каждый момент времени будет обладать набором параметров, близких к оптимальным с точки зрения величины и длительности переходных процессов, происходящих в энергосистеме.
3) В качестве метода построения системы АРВ целесообразно использование метода непрямого адаптивного управления, включающего два основных этапа: идентификацию объекта управления и вычисление параметров регулятора. При использовании указанного метода контуры адаптации не оказывают влияния на динамику системы управления. Метод характерен тем, что при его использовании не требуется информация о параметрах эталонной модели и переходных процессов.
4) В качестве идентификатора исследуемой энергосистемы как объекта управления актуально применение аппарата искусственных нейронных сетей, позволяющих решать поставленную задачу при структурном и количественном изменении параметров исследуемого объекта без собственных качественных структурных изменений идентификатора, а также обладающих возможностью дообучения в процессе функционирования системы. Нейросетевой идентификатор содержит набор внутренних параметров, оптимизируемых при обучении, неявным образом отображающих свойства идентифицируемого объекта. Нейронные сети кроме возможности аппроксимации сложных нелинейных зависимостей, обладают важнейшими свойствами самообучения и адаптации, а также регулярностью и инвариантностью структуры (типа нейронов, количества слоев, размерности входного и выходного вектора) и алгоритма обучения при незначительных вариациях структуры и параметров модели управляемого объекта (электрического генератора и энергосети), а также возможностью дообучения (повторной оптимизации собственных параметров) в процессе функционирования последнего.
5) В качестве метода вычисления параметров регулятора предложен подход, основанный на их стохастической оптимизации по заданному критерию качества регулирования при полностью известной модели идентификатора. Указанный метод обладает инвариантностью к структуре и параметрам идентификационной модели и регулятора, а также обладает гарантированной сходимостью.
Возможность практической реализации указанного подхода обеспечивается низкой скоростью изменения параметров энергосистемы по сравнению со скоростью адаптации параметров регулятора.
Результаты исследований, приведенные в статье, получены в процессе выполнения НИР «Исследование и разработка информационной системы управления генерирующим оборудованием локальных энергетических установок» по ГК № 07.514.11.4098 в рамках мероприятия 1.4 федеральной целевой программы «Исследования и разработки по приоритетным направлениям развития научно-технологического комплекса России на 2007-2013 годы».
Список литературы
1. Юрганов А.А., Кожевников В.А. Регулирование возбуждения синхронных генераторов. СПб.: Наука, 1996. 138 с.
2. Омату С., Халид М., Юсов Р. Нейроуправление и его приложения. Кн. 2 / пер. с англ. Н.В. Батина; ред. А.И. Галушкин, В.А. Птичкин. М.: ИПРЖР, 2000. 272 с. (Нейрокомпьютеры и их применение).
3. Методы робастного нейро-нечеткого и адаптивного управления / Пупков К. А., Егупов Н. Д., Гаврилов А. И. и др.; под ред. Н. Д. Егупова. М.: Изд-во МГТУ им. Н.Э. Баумана, 2001. 744 с.
4. Кузнецов Ю. П. Методы расчета режимов работы электрооборудования электрических станций и подстанций. М.: ЦППЭЭ МЭИ (ТУ), 2004. 69 с.
5. Хайкин С. Нейронные сети: полный курс. 2-е издание : Пер. с англ. М.: Издательский дом «Вильямс», 2006. 1104 с.
6. Карачев А.A. Разработка и исследование нечетких регуляторов систем возбуждения бесщеточных синхронных генераторов: дисс. … канд. техн. наук. Санкт-Петербург, 2006. 182 с.
7. Агамалов О.Н. Моделирование переходных процессов системы возбуждения турбогенератора АЭС средствами нейро-нечеткой идентификации. // Exponenta Pro . Математика в приложениях. 2003. №4. С. 16-22.
8. Хо Дак Локк. Синтез адаптивных систем управления нелинейными динамическими объектами на базе нечетких регуляторов и нейросетевой технологии : Дис. ... д-ра техн. наук. М., 2002.
9. Беляев Андрей Николаевич. Проектирование адаптивных автоматических регуляторов возбуждения мощных синхронных генераторов методами нейронечеткой идентификации. Дис. ... канд. техн. наук. СПб . 2000.
10. Абделлатиф Насери. Построение перспективных автоматических регуляторов возбуждения мощных синхронных генераторов на основе теории робастного управления методами Н- оптимизации : Дис. ... канд. техн. наук. СПб . 2002
11. Вороновский Г.К., Махотило К.В., Сергеев С.А. Проблемы и перспективы использования искусственных нейронных сетей в энергетике. Часть 2. Управление // Управление проблеми загальної енергетики [Проблемы общей энергетики]. 2007. №16. С. 54-67.
12. Chaturvedi D.K., Malik O.P., Kalra P.K. Performance of a generalized neuron-based PSS in a multimachine power system // IEEE transactions on energy conversion. - 2004. - September.- Vol.19, .№3.- P.625-632.
13. Yuan-Yih Hsu, Chao-Rong Chen. Tuning of power system stabilizer using artificial neural network // IEEE transactions on energy conversion. -1991. - December.- Vol. 6, №4.- P.612-619.
14. Karnavas Y.L., Papadopoulos D.P. Excitation Control Of A Synchronous Machine Using Polynomial Neural Networks // Journal of Electrical Engineering. 2004. Vol. 55. No. 7-8, PP. 169-179.
15. Могин А. В. Синергетический синтез систем противоаварийного управления процессами генерации электрической энергии.: Дис. … канд. Техн. наук. – Таганрог, 2006.
16. Колесников А.А., Веселов Г.Е., Попов А.Н. Синергетическое управление нелинейными электромеханическими системами. - М.: Испосервис, 2000.- 248 с.
Публикации с ключевыми словами: нейросетевая идентификация, переходный процесс, синхронный электрический генератор, автоматическая регулировка возбуждения
Публикации со словами: нейросетевая идентификация, переходный процесс, синхронный электрический генератор, автоматическая регулировка возбуждения
Смотри также:
- Влияние индуктивности обмотки якоря двигателя постоянного тока на динамические свойства системы автоматического регулирования
- Оценка робастности системы автоматического управления газотурбинным двигателем при различных цифровых регуляторах
- 77-30569/331076 Выбор формы внешней скоростной характеристики транспортного дизеля
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||