научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 03, март 2012
УДК 004.932
Россия, Московский автомобильно-дорожный государственный технический университет
Введение
Автоматизация процесса контроля качества может быть основана на анализе изображений стеклянных микрошариков, вместо использования ручных методов и микроскопа. Применение данного подхода позволяет сократить временные затраты и значительно снизить количество ошибок, совершаемых человеком при выполнении рутинных и трудоемких операций.
Поэтому исследование и разработка методов и алгоритмов обработки и анализа информации представленной в виде цифровых изображений является очень актуальной задачей.
Фильтрация изображений
При осуществлении фильтрации яркостные характеристики каждой точки исходного изображения, заменяются некоторым другим значением яркости, которое признается в наименьшей степени искаженным помехой [1, 2]. Согласно вышеописанным подходам выделяют пространственную и частотную фильтрацию [1]. Однако в большинстве случаев фильтрация связана с применением преобразования Фурье и обработкой сигналов в частотной области [3]. Среди других методов, применяемых к цифровым изображениям, можно выделить линейные и нелинейные фильтры [1, 2], также можно представить фильтры как сглаживающие и фильтры повышения резкости [1, 2].
Принцип пространственной фильтрации основан на простом перемещении маски фильтра от точки к точке и выполнении некоторого преобразования. При осуществлении линейной фильтрации отклик маски задается суммой произведений пикселей в области покрытия фильтра. Фильтрация изображения f, имеющего размеры MxN, с помощью фильтра размерами mxn задается выражением общего вида [1]:

где: a=(m-1)/2 и b=(n-1)/2 – коэффициенты, определяемые из размеров фильтра, а x=0,1,2,..M-1 и y=0,1,2,..N-1.
Принцип работы нелинейных пространственных фильтров имеет тот же характер, они обходят окрестность, причем способ перемещения маски по изображению тот же. Операции, выполняемые нелинейным фильтром, зависят от значений элементов находящихся в анализируемой окрестности. Например, действие нелинейного фильтра может заключаться в вычислении медианы значений элементов анализируемой окрестности [1].
С целью проанализировать возможности различных алгоритмов фильтрации для обработки изображений стеклянных микрошариков программно были реализованы следующие виды фильтров:
1. линейная сглаживающая фильтрация;
2. медианная фильтрация;
3. адаптивная фильтрация.
Линейный сглаживающий фильтр
В качестве линейного сглаживающего фильтра используется усредняющий фильтр выходным значением, которого является среднее значение по окрестности маски фильтра [97]. Подобный фильтр используется для задач удаления зернистости изображения вызванной импульсным шумом [61,99]. Общая формула отклика ![]() усредняющего фильтра имеет вид:
усредняющего фильтра имеет вид:

где: ![]() – координата по оси абсцисс,
– координата по оси абсцисс, ![]() - координата по оси ординат.
- координата по оси ординат.
В форме удобной для программного представления подобный фильтр можно представить следующим образом:

где: ![]() - массив имеющий размерность исходного изображения
- массив имеющий размерность исходного изображения ![]() ,
, ![]() - массив размерностью
- массив размерностью ![]() , являющийся ядром свертки изображения.
, являющийся ядром свертки изображения.
Медианный фильтр
При медианной фильтрации значения пикселей представляют собой усредненное значение точек соответствующей окрестности. Часто при решении задач устранения шума медианный фильтр является более эффективным, чем обычное усреднение, так как приводит к меньшим искажениям границ выделяемых объектов. В качестве маски при медианной фильтрации используется двумерное окно с центральной симметрией, при этом его центр располагается в текущей точке фильтрации [2]. Формулу двумерного медианного фильтра можно представить следующим образом:
![]()
где: ![]() – массив, являющийся апертурой для исходного изображения
– массив, являющийся апертурой для исходного изображения ![]() .
.
Адаптивный винеровский фильтр
В основе адаптивной фильтрации положен винеровский фильтр, являющийся одним из типов линейного фильтра для адаптивной локальной обработки изображений [2]. Если значение среднеквадратичного отклонения интенсивностей пикселей в данной локальной области большое, то винеровский фильтр выполняет небольшое сглаживание и, наоборот, при небольшом отклонении область сглаживания больше. Этот подход часто бывает более эффективным, чем обычная линейная фильтрация. Преимущество адаптивный фильтра еще заключается в том, что он сохраняет края и другие высокочастотные части объектов изображения. Однако, винеровский фильтр требует большего времени для вычислений, чем линейный фильтр [2].
Среднее значение яркости вычисляется для центрального пикселя маски ![]() , содержащей значения яркости исходного изображения в покрытой маской локальной области по следующей формуле:
, содержащей значения яркости исходного изображения в покрытой маской локальной области по следующей формуле:

Дисперсия маски:

В данном алгоритме для каждого нового положения окна маски заново вычисляются соответствующие значения. Оценка сглаживаемого шума определяется как среднее квадратичное отклонение:
![]()
Результаты фильтрации
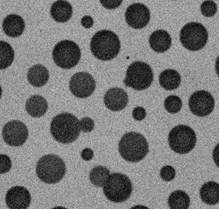
В таблице № 1 приведены результаты фильтрации при наложении на изображение стеклянных микрошариков импульсного шума. В таблице № 2 приведены результаты фильтрации наложенного на изображение стеклянных микрошариков гауссовского белого шума.
Таблица №1 – Результаты фильтрования импульсного шума на изображении
Исходное изображение |
| Импульсный шум |
|
| |
Тип фильтрации | ||
Линейная | Медианная | Адаптивная |
|
|
|


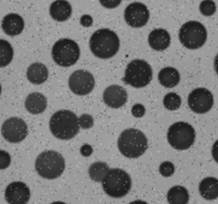


Таблица № 2 – Результаты фильтрования белого шума на изображении
Исходное изображение |
| Белый шум |
|
| |
Тип фильтрации | ||
Линейная | Медианная | Адаптивная |
|
|
|




Методы сегментации изображений
Конечный результат анализа изображений во многом определяется качеством сегментации [1], а степень детализации выделяемых характеристик зависит от конкретной задачи. Поэтому не существует отдельного метода или алгоритма подходящего для решения всех типов задач сегментации, каждый из методов имеет свои достоинства и недостатки. В большинстве случаев выбирается один или несколько алгоритмов, и модифицируются под специфичные условия задачи.
Сегментация решает в общем смысле две основные задачи [4]:
· первая задача – это разделение изображения на части, для осуществления дальнейшего анализа.
· вторая задача – это изменение формы описания содержимого изображения, что позволяет представить точки как высокоуровневые структуры, обеспечивающие эффективность дальнейшего анализа изображения.
Многими авторами выделяются различные классификации методов, но большинство из них основываются на двух следующих свойствах сигнала яркости: разрывности и однородности.
Первый подход базируется на идеях разделения изображения, основанный на резких перепадах яркости. Второй подход основывается на разделении изображения на однородные области с учетом заранее выбранных критериев [1].
Основными методами на основе разрывности яркости являются обнаружение точек линий и перепадов [1]. При обнаружении точек и линий с помощью специальных масок организуется соответствующий поиск. В качестве методов обнаружения перепадов используются производные и градиенты от функций яркости, такие методы основаны на более общих идеях [1, 4].
Методы пороговой обработки основываются на идеях разделения значимых характеристик по некоторому порогу. Порог может быть глобальным, то есть определенным на всем изображении или локальным, который определен на некоторой области [1, 2, 4].
Гистограммные методы основаны на выборе минимальных и максимальных значений или интервалов между экстремумами [4, 1].
Методы на основе преобразований Хафа, основываются на связывании точек друг с другом путем предварительного выяснения их принадлежности к некоторой кривой заданной формы или обнаружения прямых и кривых линий, по семейству заданных прямолинейных отрезков и дуг [4].
Методы теории графов, основываются на обнаружении и связывании контуров с помощью представления отрезков контуров в виде графа и осуществлении поиска на этом графе путей соответствующих искомым контурам [1].
Метод выращивания областей, основывается на обнаружении разрывов яркости. В алгоритме выделяются несколько центральных точек или групп точек, после чего, алгоритм группирует пиксели, присоединяя к каждому центру соседствующие им пиксели, которые по своим свойствам близки к центрам [1, 4].
Метод водоразделов заключается в поиске линий водораздела локальных минимумов и максимумов и построении между ними перегородок не позволяющих слиться озерам из двух близ лежащих водоразделов. Таким образом, перегородки образуют контуры границ [1, 4].
Существует множество методов решающих задачи сегментации, как и подходов классификации. Выше были рассмотрены наиболее значимые методологии. Для выбора способа сегментации цифровых изображений стеклянных микрошариков, были реализованы некоторые из методов. Далее рассматриваются методы, представляемые в виде масок. Данные методы были выбраны, поскольку хорошо реализуются программно и дают необходимое качество выделения контуров микрошариков на их цифровых изображениях.
Принцип работы таких методов основан на разности яркости элементов и фона изображения [1]. Математическое обоснование алгоритмов заложено в вычислении производных, представленных в цифровом виде как дискретные приближения градиента. В качестве градиентных методов выделяют операторы представляющие собой матричные маски [1, 4, 5]:
1. перекрестный оператор Робертса (Roberts' Crossoperator);
2. операторПревитта (Prewitt method, Compass Edge Detector);
3. операторСобела (Sobel operator).
Оператор Робертса прост в реализации и обладает высоким быстродействием, однако сильно чувствителен к помехам [1, 4, 5]. На практике для вычисления дискретных градиентов чаще всего используются операторы Превитта и Собела. Маски оператора Превитта проще реализовать, чем маски оператора Собела, однако у последнего оператора влияние шума угловых элементов маски несколько меньше, что существенно при работе с производными [1, 4, 5]. Следует отметить, что у каждой из масок сумма коэффициентов равна нулю [1,].
Оператор Робертса использует четыре значения яркости на изображении [5]:

или ![]()
Оператор Собела использует восемь отсчетов яркости в области анализируемого элемента:

Матрицы оператора Собела имеют вид [5]:

где: E – матрица исходного изображения.
В программном представлении изображения [5]:
 или
или ![]()
где:


Оператор Превитта подобен оператору Собела и отличается от него другой маской:
Матрицы оператора Собела имеют вид [5]:

В качестве методов основанных на производной второго порядка выделяют оператор Лапласиана [1, 4, 5]. Данный оператор обнаруживает границы в местах смены знака производной функции яркости. Но оператор Лапласиана очень чувствителен к шуму. Кроме того, использование модуля лапласиана приводит к удвоению контуров, что дает нежелательный эффект и усложняет сегментацию [4, 1, 5]. С целью уменьшить влияние шума часто используют лапласиан в сочетании со сглаживанием, например, по методу Гаусса. Вышеприведенное сочетание называют оператором Лапласиан гауссиана (LaplacianofGaussian — LoG) [4, 1].
Маска оператора Лапласиана гауссиана создается по следующей формуле:

где: ![]() - среднеквадратичное отклонение распределения Гаусса.
- среднеквадратичное отклонение распределения Гаусса.
Маска фильтра имеет вид:

где: a – параметр в диапазоне [0, 1].
Еще одним часто реализуемым программно методом является алгоритм Canny [4, 1, 5]. Фактически это набор последовательно применяемых алгоритмов. Данный подход устойчивый к шуму и дает, как правило, лучшие результаты по сравнению с градиентными методами. Но, так как это в принципе набор алгоритмов, то и быстродействие данного метода уступает более простым операторам.
Результаты сегментации.
В таблице 3 приводятся результаты сегментации изображений стеклянных микрошариков с помощью рассмотренных алгоритмов. Лучшие результаты по количеству выделенных контуров были получены с помощью метода Canny.
Таблица № 3 – Результаты сегментации изображения
Исходное изображение | LoG | Метод Canny |
|
|
|
Оператор Робертса | Оператор Превитта | Оператор Собела |
|
|
|




Результаты, полученные с помощью оператора Робертса, дают меньший процент выделения контуров объектов. Результаты операторов Собела и Превитта имеют большой разброс, в некоторых случаях были получены 100%, а в других ниже 60 %. Оператор Лапласиана гауссиана нередко выделяет паразитные контуры. При изменении его параметров, позволяющих убрать несуществующие контуры, исчезают и контуры исследуемых объектов. Метод Canny показал стабильные результаты и во всех случаях процент выделения контуров с помощью этого оператора превосходил 95 % порог от общего числа объектов на изображении. Этот метод был выбран как основной для реализации в системе контроля качества стеклянных микрошариков. Однако на серии изображений становится заметно более низкая скорость данного алгоритма. Поэтому в модель программного обеспечения были включены и остальные использованные в исследовании алгоритмы.
На рисунке 1 приводится гистограмма результатов, расчет которых проводился на основе анализа 100 случайных изображений, полученных с помощью цифровой фотокамеры установленной на микроскоп.
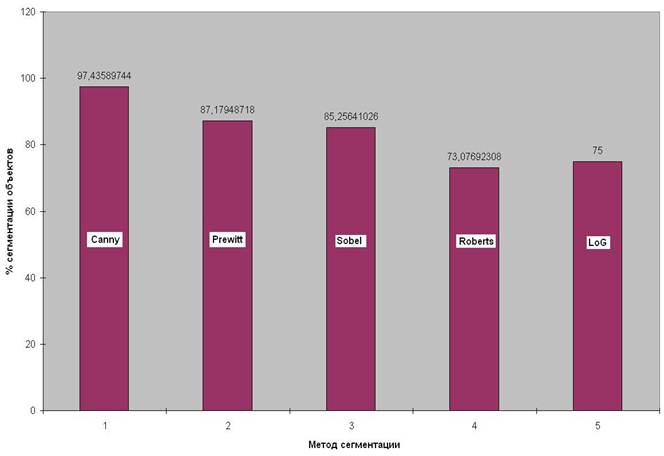
Рисунок 1 – Результаты выделения контуров по методам
Смоделированные алгоритмы фильтрации и сегментации были применены для обработки цифровых изображений в программном обеспечении автоматизированной системы промышленного контроля качества стеклянных микрошариков на предприятии ООО «ПромНаноСистемс».
Внедрение в технологический процесс контроля качества автоматизированного комплекса, позволило повысить качество производимой продукции на 30 %.
Выводы
На основе реализованных методов фильтрации делается вывод, что для импульсных помех более подходит медианный фильтр, хорошо сохраняющий границы элементов и обладающий быстродействием. Для удаления белого шума наилучшие результаты показаны адаптивным винеровским фильтром.
Градиентные алгоритмы, применяемые для выделения контуров элементов изображений более просты в реализации программными средствами, однако результаты, получаемые с их помощью, зависят от качества исследуемых изображений. Качество выделения контуров методом Cannyвыше. Однако данный алгоритм медленнее, что становится заметно на большом количестве анализируемых изображений.
Литература
1. Гонзалес Р., Вудс Р. Цифровая обработка изображений. – М.: Техносфера, 2006. – 1072 с.
2. Грузман И.С., Киричук В.С., Косых В.П., Перетягин Г.И., Спектор А.А. Цифровая обработка изображений в информационных системах: Учеб. пособие. – Новосибирск.: НГТУ, 2003. – 352 с.
3. Оппенгейм А. Шафер Р. Цифровая обработка сигналов. 2-е издание. – М.: Техносфера, 2007. – 856 с.
4. Шапиро Л., Стокман Дж. Компьютерное зрение. – М.: БИНОМ. Лаборатория знаний, 2006. – 752 с.
5. Яне Б. Цифровая обработка изображений. – М.: Техносфера, 2007. – 584 с.
Публикации с ключевыми словами: фильтрация, сегментация, стеклянные микрошарики
Публикации со словами: фильтрация, сегментация, стеклянные микрошарики
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||