научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 03, март 2012
УДК 681.05
Вычислительный центр им. А.А. Дородницына Российской академии наук
МГТУ им. Н.Э. Баумана
Введение
Задача синтеза системы управления заключается в нахождении синтезирующей функции, которая описывает зависимость управления от состояния объекта. Значение синтезирующей функции всегда можно вычислить, если решить задачу оптимального управления для текущего состояния объекта, считая его начальным состоянием. В этом случае необходимо оперативно решать задачу оптимального управления непосредственно в процессе управления объектом. Во многих случаях при управлении динамическими объектами такая возможность отсутствует, поэтому возникает проблема нахождения математического выражения, которое описывает зависимость управления от координат пространства состояния объекта. Аналитическими методами нельзя получить решение задачи синтеза управления для произвольной нелинейной модели объекта управления и функционала общего вида.
Получение математического выражения в форме параметрической многомерной функции не представляет особого интереса, так как это возможно только для ограниченного класса систем управления.
В последнее время появилась возможность с помощью вычислительной машины осуществлять поиск формы математического выражения. Прорывом в этом направлении следует считать появление генетического программирования [1]. Автор генетического программирования Дж. Коза расширил возможности применения генетического алгоритма для поиска программного кода, а, следовательно, обеспечил возможность поиска математического выражения в виде строки символов, называемой «польской записью».
Дальнейшее развитие генетического программирования привело к созданию методов грамматической эволюции [2] и аналитического программирования [3]. Отличия этих методов от генетического программирования заключаются, в основном, в форме кодирования элементов строк символов. В аналитическом программировании вместо генетического алгоритма используется метод дифференциальной эволюции.
Все перечисленные методы позволяют построить численный алгоритм поиска синтезирующей функции, обеспечивающей решение задачи синтеза управления, хотя первоначально не были предназначены для решения этой задачи. Перечисленные методы не учитывают специфических особенностей задачи синтеза, поэтому для их реализации требуются большие вычислительные мощности из-за огромного пространства поиска.
Метод сетевого оператора [4] можно также считать развитием метода генетического программирования, но данный метод создавался непосредственно для решения задачи синтеза управления, поэтому с помощью сетевого оператора невозможно получить программный код с операциями «if» или циклами. Метод сетевого оператора позволяет представить математическое выражение в виде ориентированного ациклического графа. Поиск решения осуществляется с помощью генетического алгоритма, работающего на множестве вариаций базисного решения, в качестве которого используется математическое выражение, описывающее систему управления, построенную разработчиком на основе опыта и здравого смысла.
С помощью метода сетевого оператора решено несколько задач синтеза управления [5-10], при исследовании которых возникла новая проблема т.н. «проблема начальных условий». Заметим, что значение функционала зависит от начальных условий. Если решать задачу синтеза численным методом при одних начальных условиях, то полученная синтезирующая функция может не сохранять свойства оптимальности при изменении этих начальных условий. Возникает необходимость решать задачу синтеза каждый раз для новых начальных условий, но тогда от решения такой задачи нет никакого преимущества перед методом решения задачи оптимального управления. Желательно в результате синтеза получить одну синтезирующую функцию для множества начальных условий. Если решать задачу синтеза численным методом для различных начальных условий, то возникает проблема, как вычислять значение функционала, который необходим для поисковых алгоритмов. Постановка задачи [11] синтеза на множестве начальных условий была названа общей задачей синтеза управления.
В настоящей работе рассматривается область начальных значений, состоящая из конечного числа точек, при этом известны вероятности нахождения объекта в каждой из заданных начальных точек. Данное обстоятельство позволяет построить один функционал для всех начальных точек в виде суммы функционалов для каждой точки с весом, равным вероятности нахождения объекта в этой точке в начальный момент времени.
Постановка задачи
Рассмотрим задачу синтеза управления
![]() , (1)
, (1)
![]() , (2)
, (2)
где ![]() ,
, ![]() ;
; ![]() - ограниченное замкнутое множество.
- ограниченное замкнутое множество.
Задано терминальное многообразие
![]() ,
, ![]() , (3)
, (3)
где ![]() - время окончания процесса управления.
- время окончания процесса управления.
Задан критерий качества управления
 . (4)
. (4)
Необходимо найти управление в виде
![]() , (5)
, (5)
где ![]() обеспечивает выполнение терминальных условий (3), удовлетворяет ограничениям на управление
обеспечивает выполнение терминальных условий (3), удовлетворяет ограничениям на управление ![]() ,
,![]() и минимизирует функционал (4).
и минимизирует функционал (4).
Пусть в задаче (1)-(5) начальные условия известны не точно, т.е.
![]() , (6)
, (6)
где ![]() - случайный вектор с известной функцией плотности распределения
- случайный вектор с известной функцией плотности распределения ![]() .
.
Значение функционала (4) и вид синтезирующей функции (5) зависят от начальных условий (6).
Изменим формулировку задачи синтеза. Пусть
![]() , (7)
, (7)
где ![]() - область начальных значений.
- область начальных значений.
Разобьем область ![]() на конечное число
на конечное число ![]() подобластей
подобластей
 ,
,  . (8)
. (8)
Вычислим вероятность ![]()
 . (9)
. (9)
Определим начальные условия для каждой подобласти
![]() ,
, ![]() , (10)
, (10)
где математическое ожидание случайного вектора ![]() для подобласти
для подобласти ![]() равно
равно
 ,
, ![]() ; (11)
; (11)
![]() - компонента вектора
- компонента вектора ![]() .
.
Заменим функционал (4) соотношением
 , (12)
, (12)
где ![]() - означает вычисление соотношения в скобках для решения системы (1) при начальных условиях
- означает вычисление соотношения в скобках для решения системы (1) при начальных условиях ![]() .
.
Функционал (12) определяет сумму функционалов (4) с весами (9) при начальных значениях (10) для каждой подобласти ![]() ,
, ![]() .
.
В результате имеем общую задачу синтеза управления, в которой необходимо найти одну синтезирующую функцию (5) для минимизации функционала (12), учитывающего вероятности начальных значений.
Для решения задачи используем метод сетевого оператора [4]. Метод позволяет организовать машинный поиск математического выражения.
Согласно методу сетевого оператора в математическом выражении выделяем множества элементов: множество переменных ![]() ; множество параметров
; множество параметров ![]() ; множество унарных операций
; множество унарных операций ![]() ; множество бинарных операций
; множество бинарных операций ![]() .
.
Среди унарных операций обязательно должна присутствовать тождественная операция ![]() . Бинарные операции должны быть коммутативны
. Бинарные операции должны быть коммутативны ![]() , ассоциативны
, ассоциативны ![]() , и иметь единичный элемент
, и иметь единичный элемент ![]()
![]() ,
, ![]() .
.
В операциях исключены точки разрыва с помощью замены ![]() величиной
величиной ![]() .
.
Сетевой оператор - это ориентированный граф с двумя функциями и двумя множествами значений функций
![]() , (13)
, (13)
где ![]() - множество узлов,
- множество узлов, ![]() - множество дуг,
- множество дуг, ![]() ,
, ![]() ,
, ![]() - функция на множестве узлов
- функция на множестве узлов ![]() ,
, ![]() - функция на множестве дуг
- функция на множестве дуг ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
Пусть ![]() множество узлов-источников,
множество узлов-источников, ![]() - множество узлов-стоков,
- множество узлов-стоков, ![]() ,
, ![]() – путь от узла
– путь от узла ![]() до узла
до узла ![]() , если
, если ![]() ,
, ![]() ,
, ![]() - множество всех путей графа.
- множество всех путей графа.
Сетевой оператор удовлетворяет следующим свойствам:
а) в графе отсутствуют циклы ![]() ,
, ![]() ;
;
б) ![]() ,
, ![]() ,
, ![]() ;
;
в) ![]() ,
, ![]() ,
, ![]() ;
;
г) ![]() ,
, ![]() , где
, где ![]() ;
;
д) ![]() ,
, ![]() ,
, ![]() ;
;
е) ![]() ,
, ![]() ,
, ![]() ;
;
ж) ![]() , если
, если ![]() .
.
Для представления графа сетевого оператора в памяти компьютера используем целочисленную матрицу размерности ![]()
![]() ,
,  ,
, ![]() . (14)
. (14)
Поскольку граф сетевого оператора не содержит циклов, то его узлы всегда можно пронумеровать так, чтобы номер узла, в который дуга входит, был больше номера узла, откуда дуга выходит ![]() ,
, ![]() . Тогда вычисления по сетевому оператору упрощаются. Просматриваем по строкам элементы матрицы
. Тогда вычисления по сетевому оператору упрощаются. Просматриваем по строкам элементы матрицы ![]() над главной диагональю и выполняем вычисления только для ненулевых элементов.
над главной диагональю и выполняем вычисления только для ненулевых элементов.
Алгоритм включает два шага. Первоначально инициализируем вектор узлов
 ,
, ![]() . (15)
. (15)
Затем выполняем вычисления, если ![]() ,
, ![]() ,
, ![]() ,
,
![]() . (16)
. (16)
Рассмотрим пример вычисления математического выражения по сетевому оператору. Пусть задана матрица сетевого оператора
 .
.
Пусть номера унарных и бинарных операций соответствуют работе [2]: ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
. ![]()
Инициализируем значение вектора узлов согласно (15)
![]() .
.
Вычисляем по строкам значения ненулевых элементов матрицы ![]()
![]() ,
, ![]() ,
,
![]() ,
, ![]() ,
,
![]() ,
, ![]() ,
,
![]() ,
, ![]() ,
,
![]() ,
, ![]() ,
,
![]() ,
, ![]() ,
,
![]() ,
, ![]() ,
,
![]() ,
, ![]() ,
,
![]() ,
,  .
.
Каждый сетевой оператор может соответствовать нескольким математическим выражениям. Для определения выражений введем множество номеров узлов выходов ![]() ,
, ![]() . Пусть для рассматриваемого примера
. Пусть для рассматриваемого примера ![]() . Тогда в результате получаем три математических выражения
. Тогда в результате получаем три математических выражения
![]() ,
, ![]() ,
,  .
.
Пример
Рассмотрим в качестве примера синтез системы управления летательным аппаратом на этапе посадки. В задаче летательному аппарату необходимо выйти на прямолинейную траекторию своего начального состояния, определение которого может быть неточным.
Модель плоского движения летательного аппарата описывается уравнениями
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
 ,
,
 ,
,
где ![]() - воздушная скорость,
- воздушная скорость, ![]() - угол наклона траектории,
- угол наклона траектории, ![]() - продольная дальность,
- продольная дальность, ![]() - высота,
- высота, ![]() - угол атаки,
- угол атаки, ![]() - коэффициент силы тяги,
- коэффициент силы тяги, ![]() ,
, ![]() - проекции силы аэродинамического сопротивления на оси скоростной системы координат
- проекции силы аэродинамического сопротивления на оси скоростной системы координат
![]() ,
, ![]() ,
, ![]() ,
,
 ,
,
![]() кг/м3;
кг/м3; ![]() м2:
м2: ![]() кг;
кг; ![]() Н;
Н; ![]() Нс/м;
Нс/м; ![]() Нс2/м2;
Нс2/м2; ![]() ;
; ![]() рад-1;
рад-1; ![]() рад-2;
рад-2; ![]() ;
; ![]() рад-2 ;
рад-2 ; ![]() рад-1;
рад-1; ![]() рад;
рад; ![]() с;
с; ![]() с;
с; ![]() рад;
рад; ![]() .
.
Управление ограничено: ![]() ;
; ![]() .
.
Задано терминальное многообразие в виде пространственной прямолинейной траектории ![]() ,
, ![]() , где
, где ![]() ;
; ![]() м.
м.
Необходимо найти управление, которое минимизирует функционалы
![]() ,
,
![]() ,
,
где ![]() ,
, ![]() - время окончания процесса управления
- время окончания процесса управления

![]() с.,
с., ![]() .
.
Расчеты выполнялись с помощью специализированного программного комплекса [12]. В результате применения численного метода сетевого оператора было получено управление
 ;
;
где 

![]() ,
, ![]() ,
,
![]() ,
, ![]() ,
,
![]() ,
, ![]() .
.
Результаты моделирования системы управления с полученной синтезирующей функцией приведены на рис. 1-4.
|
|
Рис.1. Траектории ЛА для граничных начальных значений | Рис. 2. Траектории ЛА для граничных начальных значений |
|
|
Рис. 3. Траектории ЛА для начальных значений, выходящих за граничный диапазон | Рис. 4. Траектории ЛА для начальных значений, выходящих за граничный диапазон |
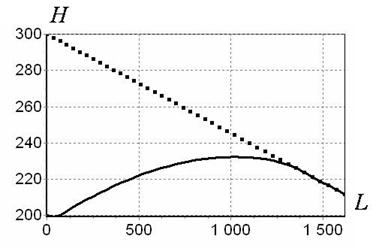

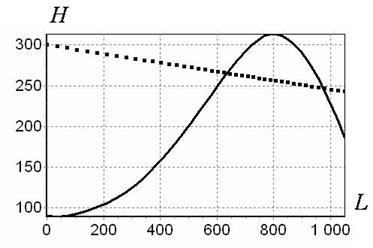

На рис.1 и 2 приведены пространственные траектории летательного аппарата для граничных начальных значений ![]() м и
м и ![]() м. Из рисунков видно, что летательный аппарат с помощью синтезированной системы управления достигает заданной пространственной траектории, которая на рис. 1-2 приведена в виде совокупности точек. На рис. 3 и 4 приведены траектории летательного аппарата для начальных значений, выходящих за граничный диапазон. Как видно из рисунков, летательный аппарат не достигает заданной траектории при начальных условиях
м. Из рисунков видно, что летательный аппарат с помощью синтезированной системы управления достигает заданной пространственной траектории, которая на рис. 1-2 приведена в виде совокупности точек. На рис. 3 и 4 приведены траектории летательного аппарата для начальных значений, выходящих за граничный диапазон. Как видно из рисунков, летательный аппарат не достигает заданной траектории при начальных условиях ![]() м и
м и ![]() м.
м.
Заключение
Применение метода сетевого оператора для решения общей задачи синтеза со случайными начальными значениями и с функционалами в виде взвешенных сумм позволило построить нелинейную систему управления летательным аппаратом. Система обеспечивает достижение летательным аппаратом заданной пространственной траектории для широкого диапазона начальных значений.
Работа выполнена по теме гранта РФФИ № 11-08-00532-а.
Список литературы
1. Koza J.R. Genetic Programming: On the Programming of Computers by Means of Natural Selection. Cambridge, Massachusetts, London, MA: MIT Press, 1992, 819 p.
2. O'Neill M., Ryan C. Grammatical Evolution. Evolutionary Automatic Programming in an Arbitrary Language. Kluwer Academic Publishers, 2002.
3. Zelinka I., Oplatkova Z. Analytic programming // Comparative Study. CIRAS’03, The second InternationalConference on Computational Intelligence, Robotics, and Autonomous Systems, Singapore, 2003.
4. Дивеев А.И. Метод сетевого оператора. М.: Изд-во ВЦ РАН. 2010. 178 с.
5. Дивеев А.И. Синтез адаптивной системы управления методом сетевого оператора// Сб. статей Вопросы теории безопасности и устойчивости систем. М.: ВЦ РАН. 2010. Вып. 12. С. 41-55.
6. Дивеев А.И., Пупков К.А., Софронова Е.А. Повышение качества систем управления на основе многокритериального синтеза методом сетевого оператора // Вестник РУДН, 2009, № 4, С. 5-12.
7. Дивеев А.И., Софронова Е.А. Синтез системы управления при неопределенных фазовых ограничениях на основе метода сетевого оператора// Труды ИСА РАН. Динамика неоднородных систем/ Под ред. чл.-корр. РАН Ю.С. Попкова. М.: ИСА РАН, ЛКИ. 2008, Т. 32(3). С. 32 – 40.
8. Дивеев А.И., Северцев Н.А. Метод сетевого оператора для синтеза системы управления спуском космического аппарата при неопределенных начальных условиях// Проблемы машиностроения и надежности машин. 2009, № 3, С. 85-91.
9. Дивеев А.И., Северцев Н.А., Софронова Е.А. Синтез системы управления метеорологической ракетой методом генетического программирования //Проблемы машиностроения и надежности машин. 2008, № 5. С. 104 - 108.
10. Diveyev A.I., Sofronova E.A. Application of network operator method for synthesis of optimal structure and parameters of automatic control system// Proceedings of 17-th IFAC World Congress, Seoul, 2008, 05.07.2008 – 12.07.2008. P. 6106 – 6113.
11. Дивеев А.И., Пупков К.А., Софронова Е.А. Синтез системы управления – задача тысячелетия// Вестник РУДН, 2011, № 2. С. 113-125.
12. Дивеев А.И., Софронова Е.А. Многокритериальный структурно-параметрический синтез системы управления методом сетевого оператора. Программа для ЭВМ. № 2009613966.
Публикации с ключевыми словами: синтез системы управления, метод сетевого оператора, управление самолетом
Публикации со словами: синтез системы управления, метод сетевого оператора, управление самолетом
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||