научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 05, май 2012
DOI: 10.7463/0512.0370775
УДК. 621.01
Россия, Волгоградский государственный технический университет
Опыт разработки и испытаний шагающих машин с цикловыми движителями показывает, что они обладают высокой грунтовой и профильной проходимостью и отличаются простотой и надежностью [1–7]. Вместе с тем, скорость их передвижения существенно ограничена. Это обусловлено высокими затратами мощности на преодоление сил инерции в каждом цикле (шаге) движения. Основной объем указанных энергозатрат связан: во-первых, с обеспечением периодического движения ног (с этапами разгона и торможения), причем у машин для работы на слабых грунтах проблема усложняется массивными стопами с развитой опорной поверхностью, предназначенными для снижения давления на грунт; а во-вторых, с несовершенством траектории опорных точек цикловых механизмов шагания, вследствие чего имеет место неравномерность курсового движения шагающей машины и колебания ее корпуса при каждом шаге.
В работе проведен анализ структуры энергозатрат на прямолинейное движение шагающих машин «тяжелой» весовой категории с цикловыми движителями. Анализ базируется на результатах теоретических исследований и полевых испытаний 5-ти тонного шагающего робототехнического комплекса «Восьминог» [8, 9], предназначенного для работы на слабых грунтах.Существование реального образца шагающей машины с известными кинематическими и инерционными характеристиками движителя существенно облегчили проведение анализа.
Конструктивно «Восьминог» (рис. 1) выполнен на базе многоцелевого шагающего шасси с побортно объединенными в шагающие опоры (шагающие модули) цикловыми движителями. На раме шасси расположены модуль силового привода, включающий в себя автономный источник электрического тока — дизель-генератор, рабочее место оператора и блок системы управления. Машина может комплектоваться различным сменным технологическим оборудованием, которое также устанавливается на раме. Шагающие опоры выполнены в виде снабженных бортовым силовым приводом несущих балок, на концах которых попарно установлены механизмы шагания сгруппированные в шагающие движители. Силовой привод шагающих опор электромеханический, включает в себя бортовые тяговые асинхронные электродвигатели, бортовые раздаточный редуктора и редуктора шагающих движителей, соединенные с раздаточными редукторами посредством карданных передач. Привод шагающих опор правого и левого борта независимый. Для обеспечения статически устойчивой походки и чередования опорной фазы и фазы переноса, шагающие движители каждого борта жестко кинематически связаны, а ведущие кривошипы каждой пары механизмов шагания установлены в противофазе на общей ведущей оси.

Рис. 1. Шагающий робототехнический комплекс «Восьминог»
Использование движителей с работающими в противофазе спаренными цикловыми механизмами шагания позволяет не заботиться о сохранении походки и устойчивости, и исключает необходимость управляемой системы адаптации. В итоге машина имеет минимальное число управляемых степеней свободы и становится существенно проще и дешевле зарубежных аналогов с адаптивным управлением [1].
Для повышения адаптивности и профильной проходимости в шагающих опорах был реализован простейший вариант системы пассивной адаптации стопы к рельефу местности — была синтезирована траектория опорной точки, обеспечивающая за счет кинематики механизма шагания и трения в шарнире стопы, подъем ее носка в фазе переноса [10]. Пассивная адаптация стопы повышает возможности машины по приспособляемости к неровностям грунта и позволяет преодолевать препятствия, превышающие более чем в 2 раза максимальную высоту траектории опорной точки.
В шагающих опорах использовались движители на базе одностепенных 4-х звенных цикловых механизмов шагания «λ-образного» типа [2]. Механизм шагания предложен Н.В. Умновым (ИМАШ РАН им. А.А. Благонравова, МГТУ им. Н.Э. Баумана). Схема механизма и траектория его опорной точки в относительном движении представлена на рис. 2. Точки на траектории расположены через равные промежутки времени — через ![]() периода цикла. Точки с заливкой соответствуют опорной фазе. Длина шага составляет около 0,8 м.
периода цикла. Точки с заливкой соответствуют опорной фазе. Длина шага составляет около 0,8 м.
а)
| б)
|
Рис. 2. Схема механизма шагания (а) и траектория его опорной точки в относительном движении (б): 1 — ведущий кривошип; 2 — Г-образный шатун (опорное звено); 3 — коромысло; 4 — стопа |


Шагающие движители снабжались сменными стопами, которые шарнирно присоединялись к опорным звеньям механизмов шагания. Использовались лыжеобразные стопы «ski-foot» и стопы с неразвитой опорной поверхностью «hoof-foot» (рис. 3).

Рис. 3. Шагающий движитель со стопами «hoof-foot»
Максимальная скорость передвижения робототехнического комплекса «Восьминог» составляет около 1 км/ч. Мощность силовой установки машины равна 16 кВт, причем на привод шагания расходуется только около 4,5 кВт. Существует возможность установки на борту машины дизель-генератора большей мощности — у известных аналогов мощность, как правило, существенно выше. У шагающей машины ASV (США), например, при массе 2700 кг мощность составляет 50 кВт, а у шагающего робота MECANT (Финляндия) при массе 1100 кг составляет 35 кВт [1]. Имеющийся резерв увеличения мощности и возможность снижения массы машины позволяет рассматривать вопрос об увеличении скорости движения робота «Восьминог» до 5–7 км/ч.
Потребную мощность на курсовое движение шагающей машины можно представить в виде суммы затрат мощности на преодоление грунтового сопротивления движению и затрат мощности, вызванных самим шагающим способом передвижения.
При анализе структуры энергозатрат шагающего способа передвижения потери мощности на преодоление грунтового сопротивления движению оценивались как
![]() , (1)
, (1)
где G — вес шагающей машины; vx — курсовая скорость машины; kf — коэффициент сопротивления движению.
Для шагающего движителя в качестве kf, в условиях отсутствия опытных данных, использовались коэффициенты сопротивления движению гусеничных машин, причем несколько заниженные их значения, так как для шагающих машин, в отличие от колесных и гусеничных, грунт не является препятствием для передвижения, а лишь требует необходимых затрат мощности на его прессование. Ориентировочные значения коэффициент сопротивления движению также определялись аналитически, по формуле ![]() , где Af — работа, затрачиваемая на прессование грунта за цикл; S — перемещение машины за цикл. В нашем случае прессование грунта за цикл (2 шага) происходит дважды, поэтому
, где Af — работа, затрачиваемая на прессование грунта за цикл; S — перемещение машины за цикл. В нашем случае прессование грунта за цикл (2 шага) происходит дважды, поэтому ![]() , где h— глубина следовой дорожки.
, где h— глубина следовой дорожки.
Курсовое движение машины при несинхронном движении шагающих движителей правого и левого борта может существенно отличается от прямолинейного. Поэтому к потерям на преодоление грунтового сопротивления надо также отнести мощность на преодоление момента сопротивления повороту, который у шагающих машин рассматриваемого типа выше, чем у колесных и гусеничных [11]. Однако в нашем случае эта составляющая потерь незначительна, из-за малой кривизны траектории.
Использование простых и надежных четырехзвенных механизмов шагания приводит, из-за несовершенства траектории опорной точки, к неравномерности курсового движения и вертикальным колебаниям корпуса в каждом цикле движения. Это требуют дополнительных энергозатрат. Дополнительные энергозатраты силового привода, в основном расходуемые на возникающие при ходьбе колебания в системе, складываются из мощности ![]() , затрачиваемой на преодоление силы тяжести машины, мощности
, затрачиваемой на преодоление силы тяжести машины, мощности ![]() , идущей на преодоление цикловых сил инерции корпуса, а также суммарных затрат мощности
, идущей на преодоление цикловых сил инерции корпуса, а также суммарных затрат мощности ![]() на преодоление сил инерции в звеньях движителя, которые также носят периодический характер. Другие составляющие затрат мощности, в рассматриваемом диапазоне невысоких скоростей передвижения, пренебрежительно малы.
на преодоление сил инерции в звеньях движителя, которые также носят периодический характер. Другие составляющие затрат мощности, в рассматриваемом диапазоне невысоких скоростей передвижения, пренебрежительно малы.
Мощность, необходимая на преодоление силы тяжести при вертикальных колебаниях корпуса шагающей машины равна
![]() , (2)
, (2)
где vz — вертикальная составляющая скорости корпуса.
Мощность, потребляемая при колебаниях шагающей машины (без учета движителей) на преодоление цикловых сил инерции равна:
![]() , (3)
, (3)
где ![]() — курсовая и вертикальная составляющие главного вектора сил инерции шагающей машины (без учета движителей); ax,az — курсовая и вертикальная составляющие ускорения шагающей опоры, соответственно.
— курсовая и вертикальная составляющие главного вектора сил инерции шагающей машины (без учета движителей); ax,az — курсовая и вертикальная составляющие ускорения шагающей опоры, соответственно.
Суммарная мощность, расходуемая на цикловые силы инерции в движителях шагающей машины, складывается из затрат на преодоление сил инерции в звеньях 4-х звенных механизмов шагания:
 , (4)
, (4)
где ![]() ,
, ![]() — курсовая и вертикальная составляющие силы инерции i-го звена (i = 1, 2, 3, 4) j-го механизма шагания (j = 1, 2) k-го борта (k = 1, 2);
— курсовая и вертикальная составляющие силы инерции i-го звена (i = 1, 2, 3, 4) j-го механизма шагания (j = 1, 2) k-го борта (k = 1, 2); ![]() ,
, ![]() — курсовая и вертикальная составляющие скорости центра масс звеньев;
— курсовая и вертикальная составляющие скорости центра масс звеньев; ![]() и
и ![]() — момент сил инерции звена и его угловая скорость в плоскости шагания.
— момент сил инерции звена и его угловая скорость в плоскости шагания.
Проекции сил инерции и момент сил инерции звеньев механизмов шагания равны, соответственно: ![]() ,
, ![]() ,
, ![]() , где miи
, где miи ![]() — масса и момент инерции звена;
— масса и момент инерции звена; ![]() ,
, ![]() — курсовая и вертикальная составляющие ускорения центра масс звена в плоскости шагания;
— курсовая и вертикальная составляющие ускорения центра масс звена в плоскости шагания; ![]() — угловое ускорение звена.
— угловое ускорение звена.
При значительных силах инерции мощность на их преодоление реализуется не всегда — возможен срыв грунта, при значительных горизонтальных силах инерции, или переход к бегу при больших вертикальных составляющих сил инерции. Для определения реально реализуемых в процессе движения мощностей на преодоление цикловых инерционных нагрузок, вычислялся главный вектор сил инерции машины. Курсовая и вертикальная составляющая главного вектора сил инерции машины определялась суммированием главного вектора сил инерции машины (без учета движителей) и сил инерции звеньев всех механизмов шагания
 (5)
(5)
Для определения инерционных нагрузок в шагающем движителе был проведен полный кинематический анализ движения его механизмов шагания. При определении скоростей и ускорений узловых точек механизмов шагания они рассматривались как плоские многозвенные механизмы. При составлении дифференциальных уравнений движения звеньев их угловые скорости выражались через скорости точек, на которые накладываются внешние связи. Выражения для скоростей узловых точек получались последовательным, от звена к звену, рассмотрением движений твердых тел. Угловые ускорения звеньев движителя определялись дифференцированием их угловых скоростей. Для задания движения шагающих опор к уравнениям движения также добавлялись формулы для проекций относительных скоростей опорных точек, являющихся узловыми точками опорного звена, а также формулы для относительных координат опорных точек, необходимых для определения момента смены стоп.
При анализе исследовалось структура энергозатрат шагающей машины в диапазоне скоростей от 1–10 км/ч. Нижняя граница соответствует скорости передвижения робототехнического комплекса «Восьминог». Верхняя граница лежит в скоростном диапазоне, когда вертикальные ускорения шагающих опор превышают ускорение силы тяжести и опорные реакции ног становятся равными нулю. В результате походка шагающей машины перестает быть статически устойчивой — машина начинает переходить к бегу. Бег, как способ передвижения, имеет свои преимущества и недостатки по сравнению со статически устойчивой ходьбой. Целесообразность бега шагающих машин рассматриваемой «тяжелой» весовой категории требует дополнительных исследований, проведение которых не входит в задачи настоящей работы.
Полученные в результате численного моделирования структура дополнительных энергозатрат за цикл и цикловые зависимости проекций главного вектора сил инерции для некоторых режимов движения робототехнического комплекса «Восьминог» представлены на рис. 4–8. Рассмотрен случай синхронного движения бортов, скольжением в асинхронном электроприводе пренебрегалось и вращение ведущих кривошипов механизмов шагания считалось равномерным. На рисунках, для большей наглядности, по оси абсцисс расположены порядковые номера точек относительной траектории опорной точки механизма шагания (рис. 2 б). Это позволяет на полученных зависимостях определить участки соответствующие опорной фазе и фазе переноса, а также определить момент смены стоп.
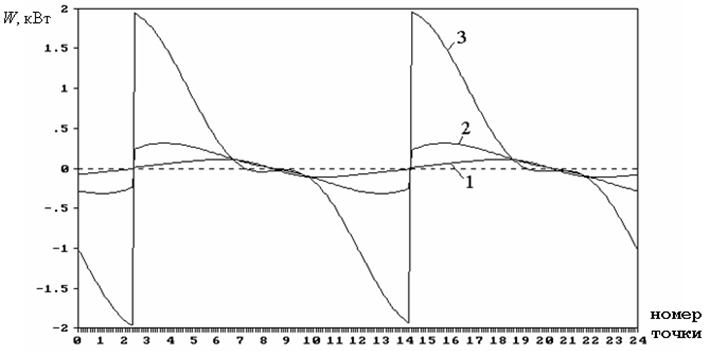
Рис. 4. Структура цикловых затрат мощности на колебания шагающей машины «Восьминог» при средней курсовой скорости 1 км/ч:![]() (кривая 1);
(кривая 1); ![]() (кривая 2);
(кривая 2); ![]() (кривая 3)
(кривая 3)
Анализ результатов расчета показал, что при скоростях передвижения порядка 1‑2 км/ч, основной объем энергозатрат шагающей машины связан с мощностью (2), расходуемой на преодоление сил тяжести при вертикальных колебаниях корпуса, а также, в случае движения в тяжелых условиях, с мощностью (1), расходуемой на прессование грунта. При движении по тяжелым грунтам со скоростью 1 км/ч затраты на прессование грунта могут достигать 2–3 КВт и превосходить мощность расходуемую на колебания в системе. На грунтах с хорошей несущей способностью потери мощности Wf на порядок меньше. Затраты на преодоление сил инерции корпуса и в движителе в указанном диапазоне низких скоростей несущественны. Составляющие Φx и Φz главного вектора сил инерции на указанных скоростях также малы и не влияют на динамику машины.
При росте скорости движения, составляющие мощности (3) и (4), затрачиваемые при движении, соответственно, на преодоление сил инерции корпуса и сил инерции в движителе, растут наиболее значительно, так как они пропорциональны кубу курсовой скорости. Именно эти составляющие ограничивают максимальную скорость шагающего способа передвижения. Потери на прессование грунта, пропорциональны курсовой скорости и растут в меньшей степени. В рассматриваемом диапазоне скоростей (1–10 км/ч) они могут достигать в экстремальных условиях движения 25–30% от общих энергозатрат, однако в маршевых режимах, при сравнительно легких условиях движения, они составляют менее 10% от общих потерь.
На рис. 5 представлена структура дополнительных энергозатрат шагающей машины «Восьминог» при скорости движения 5 км/ч. Указанная скорость близка к предельной реально реализуемой скорости для рассматриваемого мобильного робота.

Рис. 5. Структура цикловых затрат мощности на колебания шагающей машины «Восьминог» при средней курсовой скорости 5 км/ч:![]() (кривая 1);
(кривая 1); ![]() (кривая 2);
(кривая 2); ![]() (кривая 3)
(кривая 3)
Основной вклад в суммарные энергозатраты на движение шагающей машины при рассматриваемой скорости вносит мощность (3), затрачиваемая на преодоление сил инерции корпуса. Несколько ей уступает мощность (2), расходуемая на преодоление силы тяжести при вертикальных колебаниях корпуса машины. Затраты мощности на преодоление сил инерции в движителе (4), в рассматриваемом случае, вносят наименьший вклад в суммарную потребную мощность. Положения максимальных значений основных составляющих энергозатрат ![]() и
и ![]() совпадают. В результате суммарные затраты мощности на передвижение меняются скачкообразно. Такое изменение потребляемой мощности требует необоснованного увеличения мощности силовой установки и бортовых тяговых электродвигателей и приводит к дополнительным потерям, в частности, из-за снижения к.п.д. электропривода. Причем, в системе возможна лишь частичная рекуперация энергии — она теряется при ударном взаимодействии стоп с грунтом при их смене и по другим причинам. В шагающей машине «Восьминог», в частности, рекуперации энергии в системе не происходит из-за включенной в состав бортового редуктора самотормозящейся передачи, обеспечивающей устойчивость машины при неработающем силовом приводе.
совпадают. В результате суммарные затраты мощности на передвижение меняются скачкообразно. Такое изменение потребляемой мощности требует необоснованного увеличения мощности силовой установки и бортовых тяговых электродвигателей и приводит к дополнительным потерям, в частности, из-за снижения к.п.д. электропривода. Причем, в системе возможна лишь частичная рекуперация энергии — она теряется при ударном взаимодействии стоп с грунтом при их смене и по другим причинам. В шагающей машине «Восьминог», в частности, рекуперации энергии в системе не происходит из-за включенной в состав бортового редуктора самотормозящейся передачи, обеспечивающей устойчивость машины при неработающем силовом приводе.
Значения сил инерции в движителе в рассматриваемом диапазоне скоростей сравнительно невелики (наиболее существенны горизонтальные силы инерции в фазе переноса, где основной вклад вносит громоздкая лыжеобразная стопа) и они не могут существенно влиять на динамику движения машины. Иная картина имеет место для корпуса шагающей машины. Значения проекций главного вектора сил инерции корпуса, во-первых, на порядок выше значения сил инерции в движителе, а во-вторых, горизонтальная составляющая сил инерции корпуса уже при скорости 5 км/ч достигает значений, близких к максимальной силе сцепления шагающей машины на хорошем грунте (максимальные значения коэффициента сцепления на грунтах с хорошими сцепными свойствами kφmax=0,8–1,2). В результате курсовая составляющая Φx главного вектора сил инерции машины (рис. 6) превосходит реально реализуемую для большинства грунтов силу сцепления. Это означает, что уже при скорости 5 км/ч, даже на грунтах с хорошими сцепными свойствами, будет иметь место срыв грунта и буксование стоп.

Рис. 6. Изменение за цикл курсовой (кривая 1) и вертикальной (кривая 2) составляющих главного вектора сил инерции робота «Восьминог» при средней курсовой скорости 5 км/ч
В процессе анализа было выяснено влияние массы стопы на энергозатраты связанные с преодолением сил инерции в каждом цикле движения. На рис. 7 показано изменение необходимой для движения мощности шагающей машины «Восьминог» с массивными лыжеобразными стопами (массой 40 кг) и стопами «hoof-foot» с неразвитой опорной поверхностью (массой 4 кг). Зависимости свидетельствуют о минимальном влиянии массы стопы рассматриваемого движителя в диапазоне невысоких скоростей.
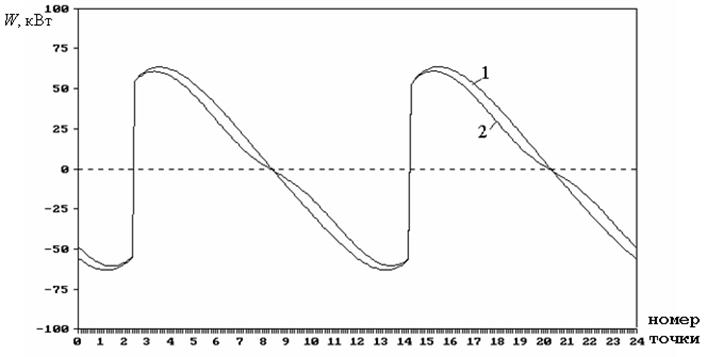
Рис. 7. Изменение за цикл потребной на движение мощности шагающей машины «Восьминог» с лыжеобразными стопами (кривые 1) и стопами «hoof-foot» (кривые 2) при средней курсовой скорости 5 км/ч
Таким образом, результаты анализа показали, что цикловой шагающий движитель робототехнического комплекса «Восьминог», хорошо себя зарекомендовавший на малых скоростях, не позволяет повысить скорость движения выше 5 км/ч. Скорость машины ограничена чрезмерным ростом энергозатрат на колебания корпуса, вызванные шагающим способом передвижения, и недопустимо высокими курсовыми составляющими сил инерции, приводящими к срыву грунта и буксованию стоп.
Для повышения максимальной скорости передвижения исследовалась возможность оптимизации шагающего движителя за счет улучшения закона движения опорной точки механизма шагания по траектории. Рассматривалась эффективность введения в силовую цепь дополнительных устройств [1] (механизмов-корректоров, асинхронных карданных передач и др.), корректирующих закон вращения ведущих кривошипов механизмов шагания и ускоряющих фазу переноса. В этом случае опорная часть траектории стремится к прямолинейному и равномерному ее нижней участку (рис. 2 б). В итоге снижается неравномерность курсового движения и уменьшаются колебания корпуса, обусловленные шагающим способом передвижения. Форма траектории при этом остаётся неизменной. Также рассматривалась возможность оптимизации самой траектории опорной точки механизма шагания за счет использования механизмов с большим числом звеньев [1].
Математическое моделирование показало, что в диапазоне низких скоростей (до 3–4 км/ч) энергетическую эффективность движения шагающих машин «тяжелой» весовой категории можно улучшить оптимизацией траектории опорных точек движителя и оптимизацией закона движения опорных точек по траектории путем ускорения фазы переноса. При более высоких скоростях ускоренный перенос ног нежелателен, так как приводит к недопустимо высокому росту сил инерции в движителе. Например, на рис. 8 представлена зависимость потребной на движение мощности шагающей машины «Восьминог» с 4-х звенным механизмом-корректором. Использование механизма-корректора позволило снизить амплитуду вертикальных колебаний корпуса машины с 28 мм до 6 мм и уменьшить коэффициент неравномерности ее курсовой скорости с 0,836 до 0,375. Также существенно уменьшились разрывы скоростей и ускорений при смене стоп. Однако, ускоренный перенос стоп и опорных звеньев механизмов шагания привел к чрезвычайному росту мощности (4) на преодоление сил инерции в движителе. Она становится наиболее существенной и определяет суммарные затраты на колебания в системе, обуславливая их рост на порядок в сравнении с базовой машиной.
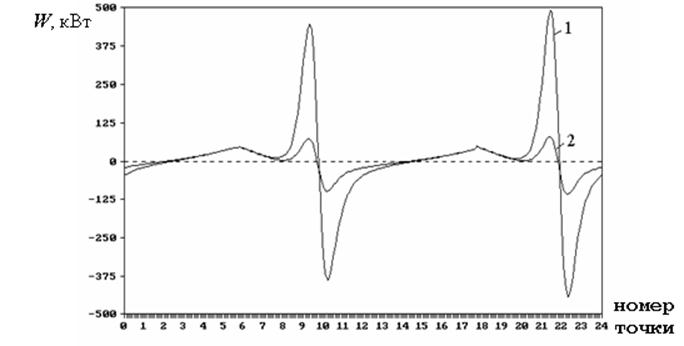
Рис. 8. Изменение за цикл потребной на движение мощности шагающей машины с 4-х звенным механизмом-корректором и лыжеобразными стопами (кривые 1) и стопами «hoof-foot» (кривые 2) при средней курсовой скорости 5 км/ч
Основной вклад в инерционные энергозатраты в движителе вносят массивные лыжеобразные стопы. При использовании стоп «hoof-foot» (меньшей массы) энергозатраты в движителе (рис. 8), естественно, уменьшаются. Однако суммарная мощность на колебания в системе остается значительной и превосходит аналогичную мощность в машине с базовым движителем
Таким образом, проведенный анализ, что задача кардинального снижения энергозатрат на преодоление цикловых сил инерции и увеличения скорости передвижения шагающих машин «тяжелой» весовой категории с цикловыми движителями не может быть достигнута, в полной мере, только за счет оптимизационного синтеза механизмов шагания. Оптимизацию движителя необходимо проводить совместно с другими методами повышения энергоэффективности движения, например, методами пассивного подрессоривания и динамического управления колебаниями [12], позволяющими обеспечить взаимную компенсацию различных составляющих энергозатрат.
Работа выполнена при поддержке РФФИ (проекты 11-08-97061, 11-08-00955)
СПИСОК ЛИТЕРАТУРЫ
1. Динамика и управление движением шагающих машин с цикловыми движителями: монография / Е.С. Брискин, В.В. Жога, В.В. Чернышев, А.В. Малолетов; под ред. Е.С. Брискина. М.: Машиностроение, 2009. 191 с.
2. Брискин Е.С., Чернышев В.В. Экспериментальные исследования динамики многоопорной шагающей машины с движителями лямбдаобразного вида // Изв. вузов. Машиностроение. 1999. №4. C. 32-37.
3. Чернышев В.В. Опыт использования шагающей машины для ликвидации аварийного разлива нефти // Безопасность жизнедеятельности. 2003. №5. C. 28-30.
4. Опыт разработки и испытаний шагающих опор дождевальной машины / Брискин Е.С., Чернышев В.В.,Жога В.В.,Малолетов А.В. Тракторы и сельхозмашины. 2011.№9.C.27-31.
5. Чернышев В.В. Полевые исследования шагающих машин // Тракторы и сельскохозяйственные машины. 2004. №4. C. 20-22.
6. On Dynamics of Movement of Walking Machines with Gears on the Basis of Cycle Mechanisms / Briskin E.S., Chernyshev V.V. Maloletov A.V. [etc.] // Theory and Practice of Robots and Manipulators. ROMANSY 13: Proc. of the 13-th CISM-IFToMM Symposium / International Centre for Mechanical Sciences. Wien; New York, 2000. P. 313-322.
7. On ground and profile practicability of multi-legged walking machines / Briskin E.S., Chernyshev V.V. Maloletov A.V. [etc.] // Climbing and Walking Robots. CLAWAR 2001: Proc. of the 4rth Intю Conf. London, 2001. P. 1005-1012.
8. Концепция проектирования, динамика и управление движением шагающих машин. Динамика движения шагающих машин серии «Восьминог»/ Е.С. Брискин, В.В. Чернышев, В.В. Жога [и др.] // Мехатроника, автоматизация, управление. 2005. №6. C. 19-26.
9. Концепция проектирования, динамика и управление движением шагающих машин. Алгоритмы управления движением шагающих машин серии "Восьминог" и экспериментальные исследования / Е.С. Брискин, В.В. Чернышев, В.В. Жога [и др.] // Мехатроника, автоматизация, управление. 2005. №7. C. 13-18.
10. Брискин Е.С., Чернышев В.В. Цикловые механизмы шагания с пассивно управляемой стопой // Теория механизмов и машин. 2004. №1. C. 80-88.
11. Чернышев В.В. Сопротивление бортовому повороту шагающей машины // Тракторы и сельскохозяйственные машины. 2003. №2. C. 24-27.
12. Чернышев В.В. Пассивное подрессоривание в мобильных робототехнических системах с цикловыми механизмами шагания // Изв. вузов. Машиностроение. 2003. №1. C. 31-39.
Публикации с ключевыми словами: шагающие роботы, шагающий движитель, динамическое моделирование, структура энергозатрат, энергоэффективность движения
Публикации со словами: шагающие роботы, шагающий движитель, динамическое моделирование, структура энергозатрат, энергоэффективность движения
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||