научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 01, январь 2012
УДК 621.833
МГТУ им. Н.Э. Баумана
Кинематическую погрешность ![]() волновых зубчатых передач вызывают три основные причины.
волновых зубчатых передач вызывают три основные причины.
1. Деформация гибкого колеса (ГК). При абсолютно точном изготовлении всех деталей передачи деформация ГК вызывает собственную кинематическую погрешность ![]() . Для передачи ВЗП-80 эта погрешность изменятся в пределах от 0.05 до 0.4 мкм (от 0.25 до 2 угл. сек) в зависимости от нагрузки [2].
. Для передачи ВЗП-80 эта погрешность изменятся в пределах от 0.05 до 0.4 мкм (от 0.25 до 2 угл. сек) в зависимости от нагрузки [2].
2. Радиальные колебания кулачка, вызванные неточностью изготовления деталей передачи. Для передачи ВЗП-80 с деталями, изготовленными по 8…9 квалитетам точности, при использовании фланцевого двигателя повышенной точности ![]() изменяется в пределах от 1.2 до 4 угл. мин. при работе на холостом ходу [1]. При использовании дополнительного упругого элемента в конструкции кулачка кинематическая погрешность снизится, а при использовании самоустанавливающегося кулачка погрешность установки кулачка не оказывает влияния на кинематическую погрешность передачи.
изменяется в пределах от 1.2 до 4 угл. мин. при работе на холостом ходу [1]. При использовании дополнительного упругого элемента в конструкции кулачка кинематическая погрешность снизится, а при использовании самоустанавливающегося кулачка погрешность установки кулачка не оказывает влияния на кинематическую погрешность передачи.
3. Погрешности изготовления зубчатых колес.
В кинематической погрешности зубчатого колеса можно выделить две составляющие.
Первая составляющая вызвана смещением рабочей оси относительно базовой оси. Базовая ось обычно совпадает с технологической осью, т.е. осью, относительно которой зубчатое колесо вращается при чистовой обработке на станке. Эта составляющая учитывается при расчете радиальных колебаний кулачка.
Вторая составляющая кинематической погрешности зубчатого колеса вызвана кинематической погрешностью цепи деления зубообрабатывающего станка. Она характеризуется погрешностью обката ![]() по ГОСТ 9178-81 или накопленной погрешностью шага колеса
по ГОСТ 9178-81 или накопленной погрешностью шага колеса ![]() по ОСТ 5.8686-84 при совпадении базовой и технологической осей колеса.
по ОСТ 5.8686-84 при совпадении базовой и технологической осей колеса.
В волновой передаче гибкое колесо (ГК) касается жесткого колеса (ЖК) кромками зубьев. Кромочный контакт приводит к тому, что на ![]() оказывает влияние радиальное биение поверхности вершин зубьев ГК
оказывает влияние радиальное биение поверхности вершин зубьев ГК ![]() (ОСТ 5.8686-84). В данной статье это влияние не рассматривается.
(ОСТ 5.8686-84). В данной статье это влияние не рассматривается.
В предлагаемой работе рассматривается влияние погрешности шага гибкого колеса ![]() на кинематическую погрешность передачи
на кинематическую погрешность передачи ![]() . Параметры рассматриваемой передачи имеют следующие значения:
. Параметры рассматриваемой передачи имеют следующие значения: ![]()
![]() ,
, ![]() (число тел качения в гибком подшипнике). Остальные параметры приведены в работе [2]. При определении кинематической погрешности волновая передача представляется упругой системой с односторонними связями. Методика расчета приведена в работе [1].
(число тел качения в гибком подшипнике). Остальные параметры приведены в работе [2]. При определении кинематической погрешности волновая передача представляется упругой системой с односторонними связями. Методика расчета приведена в работе [1].
Погрешность положения рабочего профиля зубчатого колеса можно выразить через погрешность углового положения зуба. Разность между действительным и номинальным положениями зуба в первом приближении можно представить в виде
 , (1)
, (1)
где ![]() – накопленная погрешность шага ГК;
– накопленная погрешность шага ГК; ![]() – диаметр делительной окружности ГК;
– диаметр делительной окружности ГК; ![]() – угловая координата зуба ГК.
– угловая координата зуба ГК.
В обычной прямозубой зубчатой передаче погрешность ![]() не влияет на боковой зазор в зацеплении. В волновой передаче погрешность расположения зубьев
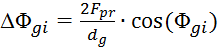
не влияет на боковой зазор в зацеплении. В волновой передаче погрешность расположения зубьев ![]() приводит к изменению деформации ГК и, следовательно, изменяет боковые зазоры. На рис. 1 приведены графики изменения гарантированного бокового зазора в передаче ВЗП-80 при нулевой нагрузке, полученные расчетным путем. Из анализа графиков можно сделать следующие выводы.
приводит к изменению деформации ГК и, следовательно, изменяет боковые зазоры. На рис. 1 приведены графики изменения гарантированного бокового зазора в передаче ВЗП-80 при нулевой нагрузке, полученные расчетным путем. Из анализа графиков можно сделать следующие выводы.
1.Чем больше накопленная погрешность шага ![]() , тем меньше гарантированный боковой зазор
, тем меньше гарантированный боковой зазор ![]() .
.
2.Чем больше коэффициент смещения гибкого колеса ![]() , тем меньше боковой зазор
, тем меньше боковой зазор ![]() .
.
3. Коэффициент смещения ![]() , необходимый для создания предварительного натяга в зацеплении, зависит от накопленной погрешности шага
, необходимый для создания предварительного натяга в зацеплении, зависит от накопленной погрешности шага ![]() .
.
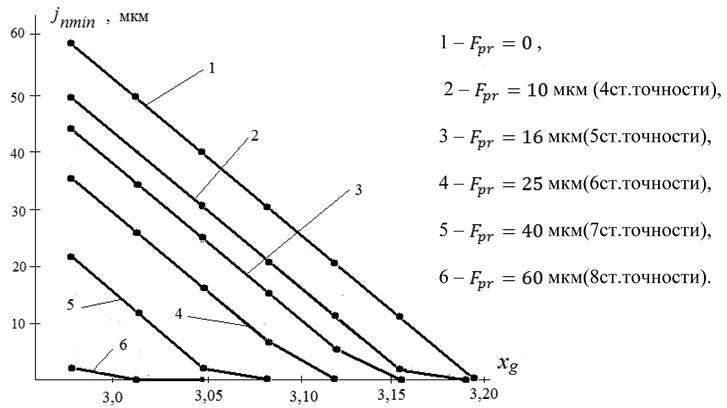
Рис.1. Боковой зазор в зацеплении
С увеличением нагрузки действительный боковой зазор будет увеличиваться. Основными причинами этого увеличения являются контактная и изгибная деформации зубьев гибкого и жесткого колес, изгиб оболочки гибкого колеса. На рис. 2 представлены графики зависимостей гарантированного бокового зазора ![]() от нагрузки при изготовлении ГК по 8 ст. точности для двух значений коэффициентов смещения
от нагрузки при изготовлении ГК по 8 ст. точности для двух значений коэффициентов смещения ![]() и
и ![]() . Из этих рисунков видно, что в диапазоне нагрузок
. Из этих рисунков видно, что в диапазоне нагрузок ![]() гарантированный боковой зазор
гарантированный боковой зазор ![]() резко увеличивается, что связано с контактной и изгибной деформацией зубьев, а также с деформацией оболочки ГК.
резко увеличивается, что связано с контактной и изгибной деформацией зубьев, а также с деформацией оболочки ГК.
Начиная с момента ![]() боковой зазор растет значительно медленнее. Это объясняется тем, что зубья ГК и ЖК, между которыми расположен минимальный боковой зазор, начинают касаться друг друга по рабочим поверхностям.
боковой зазор растет значительно медленнее. Это объясняется тем, что зубья ГК и ЖК, между которыми расположен минимальный боковой зазор, начинают касаться друг друга по рабочим поверхностям.
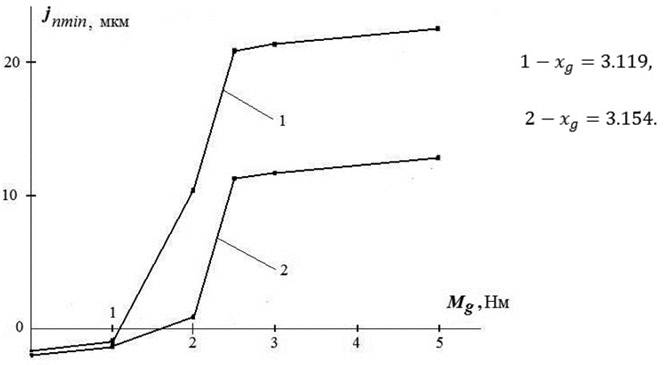
Рис. 2. Зависимость бокового зазора от момента сопротивления
На рис. 3 приведены графики зависимостей наибольшей кинематической погрешности ![]() ВЗП-80 от коэффициента смещения ГК при нулевой нагрузке. Как видно из приведенных рисунков с уменьшением коэффициента смещения гибкого колеса
ВЗП-80 от коэффициента смещения ГК при нулевой нагрузке. Как видно из приведенных рисунков с уменьшением коэффициента смещения гибкого колеса ![]() кинематическая погрешность
кинематическая погрешность ![]() увеличивается до некоторого значения. Дальнейшее уменьшение
увеличивается до некоторого значения. Дальнейшее уменьшение ![]() не изменяет
не изменяет ![]() . Рассмотрим механизм возникновения таких зависимостей.
. Рассмотрим механизм возникновения таких зависимостей.
Положение зуба ГК определяется зависимостью (1). Из этой зависимости видно, что если зуб, находящийся на большой оси кулачка, опережает свое номинальное положение, то зуб, находящийся на большой оси кулачка в противоположной зоне зацепления, отстает от своего номинального положения на ту же величину. Поэтому при отсутствии бокового зазора (![]() сила, действующая на зуб ГК в одной зоне зацепления, равна по величине силе, действующей на зуб в противоположной зоне зацепления. Одна сила создает момент, направленный в одну сторону, другая сила – в другую сторону. Следовательно, при
сила, действующая на зуб ГК в одной зоне зацепления, равна по величине силе, действующей на зуб в противоположной зоне зацепления. Одна сила создает момент, направленный в одну сторону, другая сила – в другую сторону. Следовательно, при ![]() деформация зубьев не влияет на положение ГК. Незначительное изменение этого положения происходит из-за деформации оболочки гибкого колеса.
деформация зубьев не влияет на положение ГК. Незначительное изменение этого положения происходит из-за деформации оболочки гибкого колеса.
При наличии бокового зазора кинематическая погрешность ![]() будет расти до тех пор, пока боковой зазор полностью не закроется. Например, при
будет расти до тех пор, пока боковой зазор полностью не закроется. Например, при ![]() боковой зазор полностью закрывается при
боковой зазор полностью закрывается при ![]() (см. рис.1). При этом значении коэффициента смещения
(см. рис.1). При этом значении коэффициента смещения ![]() прекращается рост кинематической погрешности
прекращается рост кинематической погрешности ![]() (см. рис. 3).
(см. рис. 3).

Рис. 3. Кинематическая погрешность ВЗП-80 (![]() =0)
=0)
На рис. 4 представлены графики изменения кинематической погрешности ![]() в зависимости от угла поворота гибкого колеса
в зависимости от угла поворота гибкого колеса ![]() при нулевой нагрузке и 4-ой степени точности ГК. Из этих графиков видно, что
при нулевой нагрузке и 4-ой степени точности ГК. Из этих графиков видно, что ![]() имеет периодический характер. Период колебаний кинематической погрешности равен времени поворота гибкого колеса на угол
имеет периодический характер. Период колебаний кинематической погрешности равен времени поворота гибкого колеса на угол ![]() относительно кулачка, что соответствует углу поворота ГК относительно ЖК на угол
относительно кулачка, что соответствует углу поворота ГК относительно ЖК на угол ![]() .
.
Кинематическая погрешность при повороте кулачка растет до некоторого значения (см. рис. 4). Горизонтальные участки рассматриваемых зависимостей соответствуют нулевому значению бокового зазора. Например, при ![]() боковой зазор
боковой зазор ![]() близок к нулю (см. рис.1, кривая 2), а наибольшая кинематическая погрешность передачи
близок к нулю (см. рис.1, кривая 2), а наибольшая кинематическая погрешность передачи ![]() (см. рис. 3, кривая 1). При этом же значении
(см. рис. 3, кривая 1). При этом же значении ![]() максимальное значение кинематической погрешности
максимальное значение кинематической погрешности ![]() =5 мкм (рис. 4, кривая 6).
=5 мкм (рис. 4, кривая 6).
На рис. 5 приведены графики зависимостей кинематической погрешности ![]() от коэффициента смещения
от коэффициента смещения ![]() при различных нагрузках. Из представленных графиков видно, что с ростом нагрузки кинематическая погрешность
при различных нагрузках. Из представленных графиков видно, что с ростом нагрузки кинематическая погрешность ![]() уменьшается. Рассмотрим причины появления представленных зависимостей.
уменьшается. Рассмотрим причины появления представленных зависимостей.

Рис. 4. Кинематическая погрешность ВЗП-80 (![]() , 4 ст. точности ГК)
, 4 ст. точности ГК)
С ростом нагрузки увеличиваются контактные деформации зубьев в обеих зонах зацепления. При номинальных размерах гибкого колеса эти деформации в обеих зонах зацепления одинаковые. При наличии погрешности изготовления гибкого колеса ![]() в одной зоне зацепления контактные деформации увеличиваются, а в другой уменьшаются. Следовательно, если бы контактные деформации линейно зависели от нагрузки, то изменение этих деформаций с появлением погрешности
в одной зоне зацепления контактные деформации увеличиваются, а в другой уменьшаются. Следовательно, если бы контактные деформации линейно зависели от нагрузки, то изменение этих деформаций с появлением погрешности ![]() не оказывало влияние на положение ГК. Нелинейный характер контактных деформаций приводит к небольшому изменению положения ГК с ростом
не оказывало влияние на положение ГК. Нелинейный характер контактных деформаций приводит к небольшому изменению положения ГК с ростом ![]() .
.

Рис. 5. Кинематическая погрешность ВЗП-80 (8 ст. точности ГК)
Если накопленная погрешность шага гибкого колеса имеет большие значения, то при небольших нагрузках зубья в одной из зон зацепления могут полностью выйти из зацепления. Это при наличии бокового зазора может привести к значительному росту кинематической погрешности передачи ![]() , т.к. с ростом
, т.к. с ростом ![]() увеличение контактных деформаций в одной зоне зацепления не будет компенсироваться уменьшением контактных деформаций в другой зоне зацепления.
увеличение контактных деформаций в одной зоне зацепления не будет компенсироваться уменьшением контактных деформаций в другой зоне зацепления.
Если при заданной нагрузке боковой зазор равен нулю (передача собрана с натягом), то после выхода из зацепления зуба по рабочей кромке он входит в зацепление по нерабочей кромке. Поэтому в этом случае выход из зацепления зубьев в одной зоне зацепления не приведет к существенному изменению ![]() .
.
С уменьшением ![]() уменьшается толщина зубьев и, следовательно, возрастает боковой зазор. Поэтому при уменьшении
уменьшается толщина зубьев и, следовательно, возрастает боковой зазор. Поэтому при уменьшении ![]() кинематическая погрешность передачи возрастает. Рост кинематической погрешности происходит только до некоторого значения, начиная с которого
кинематическая погрешность передачи возрастает. Рост кинематической погрешности происходит только до некоторого значения, начиная с которого ![]() остается постоянной (см. рис. 5). Этот рост объясняется наличием бокового зазора. В этом случае зубья ГК и ЖК не касаются друг друга по нерабочим кромкам. Например, при
остается постоянной (см. рис. 5). Этот рост объясняется наличием бокового зазора. В этом случае зубья ГК и ЖК не касаются друг друга по нерабочим кромкам. Например, при ![]() (см. рис. 5)
(см. рис. 5) ![]() возрастает при уменьшении
возрастает при уменьшении ![]() до 3.154. При этих же значениях нагрузки и коэффициента смещения
до 3.154. При этих же значениях нагрузки и коэффициента смещения ![]() гарантированный боковой зазор близок к нулю (см. рис. 2).
гарантированный боковой зазор близок к нулю (см. рис. 2).
На рис. 6 приведен график зависимости кинематической погрешности ![]() от нагрузки при
от нагрузки при ![]() и 8-ой степени точности изготовления ГК. Момент на гибком колесе изменяется от 5 до 100 Нм. В этом диапазоне нагрузок боковые зазоры не оказывают влияния на кинематическую погрешность передачи, так как зубья ГК и ЖК взаимодействуют по рабочим и нерабочим поверхностям. В данном случае основными причинами, вызывающими кинематическую погрешность, являются нелинейность контактных деформаций зубьев и изгибная деформация оболочки ГК. Колебательный характер представленной зависимости объясняется изменением количества тел качения, взаимодействующих с наружным кольцом подшипника, при увеличении нагрузки.
и 8-ой степени точности изготовления ГК. Момент на гибком колесе изменяется от 5 до 100 Нм. В этом диапазоне нагрузок боковые зазоры не оказывают влияния на кинематическую погрешность передачи, так как зубья ГК и ЖК взаимодействуют по рабочим и нерабочим поверхностям. В данном случае основными причинами, вызывающими кинематическую погрешность, являются нелинейность контактных деформаций зубьев и изгибная деформация оболочки ГК. Колебательный характер представленной зависимости объясняется изменением количества тел качения, взаимодействующих с наружным кольцом подшипника, при увеличении нагрузки.
Рис. 6. Кинематическая погрешность ВЗП-80 (![]() 8 ст. точности гибкого колеса)
8 ст. точности гибкого колеса)
Выводы
1. Наибольшая погрешность волновой зубчатой передачи ![]() значительно меньше накопленной погрешности шага гибкого колеса
значительно меньше накопленной погрешности шага гибкого колеса ![]() . Это объясняется наличием двух зон зацепления. Погрешности расположения зубьев в первой зоне зацепления вызывают поворот гибкого колеса в одну сторону, а во второй зоне зацепления – в другую.
. Это объясняется наличием двух зон зацепления. Погрешности расположения зубьев в первой зоне зацепления вызывают поворот гибкого колеса в одну сторону, а во второй зоне зацепления – в другую.
2. При малых нагрузках наличие бокового зазора может значительно увеличить кинематическую погрешность передачи. С этой точки зрения волновую передачу желательно собирать с предварительным натягом.
3. Для ВЗП-80 с 8 степенью точности изготовления ГК кинематическая погрешность ![]() изменяется от 0,27 до 0,88 мкм (от 1,5 до 4,8 угл. сек.), что соизмеримо с собственной кинематической погрешностью передачи.
изменяется от 0,27 до 0,88 мкм (от 1,5 до 4,8 угл. сек.), что соизмеримо с собственной кинематической погрешностью передачи.
4. В общем случае накопленную погрешность шага ГК можно разложить в ряд Фурье
![]() ,
,
где ![]() – амплитуда i-ой гармоники.
– амплитуда i-ой гармоники.
В статье рассмотрено влияние на кинематическую погрешность передачи только первой гармоники. Следует отметить, что четные составляющие ![]() будут оказывать большее влияние на кинетическую погрешность передачи, чем нечетные составляющие. Для четных составляющих отклонения угловых координат зубьев от номинальных значений в двух зонах зацепления одинаковые по величине и направлению.
будут оказывать большее влияние на кинетическую погрешность передачи, чем нечетные составляющие. Для четных составляющих отклонения угловых координат зубьев от номинальных значений в двух зонах зацепления одинаковые по величине и направлению.
Список литературы
1. Люминарский И.Е., Люминарский С.Е. Расчет кинематической погрешности волновой зубчатой передачи как упругой системы с односторонним контактом звеньев // Известия вузов. Машиностроение. – 2008. – № 8. – С. 9–19.
2. Люминарский И.Е. Собственная кинематическая погрешность волновой зубчатой передачи // Машиностроение и инженерное образование. – 2008. – № 2. – С. 53–56.
Публикации с ключевыми словами: волновая передача, гибкое колесо, жесткое колесо, кинематическая погрешность, накопленная погрешность шага, погрешность обката
Публикации со словами: волновая передача, гибкое колесо, жесткое колесо, кинематическая погрешность, накопленная погрешность шага, погрешность обката
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||