научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 12, декабрь 2011
УДК 621.31(075.8)
Наличие ненулевого сигнала емкостного датчика перемещений приводит к нежелательному смещению чувствительного элемента из геометрического центра подвеса и возрастанию погрешностей прибора. В работе рассматривается способ автоматической компенсации ненулевого сигнала датчика, основанный на использовании межканальных связей электростатического подвеса.
В электростатическом гироскопе ротор, представляющий собой сферическое проводящее тело, помещен в вакуумную полость и раскручен до номинальных оборотов. На поверхности полости расположены электроды, на которые подаются регулируемые высоковольтные потенциалы. Существуют различные конфигурации электродных систем. Например, на рис. 1 показана условная схема трехосного сферического подвеса с электродами в виде правильных сферических сегментов.

Рис. 1. Трехосный электростатический подвес
Пара электродов (1, 3) обеспечивает центрирование сферического ротора по оси x, а пары (2, 4), (5, 6) – по осям yи z соответственно. Оптимальные характеристики электростатического гироскопа достигаются в случае, когда взвешиваемое тело представляет собой идеальную сферу, геометрический центр которой совпадает с геометрическим центром электродной системы. При отклонении ротора от сферичности, несбалансированности ротора, а также при смещениях ротора из геометрического центра подвеса появляются нежелательные уводящие моменты [1], снижающие точность прибора. Устранение несферичности и несбалансированности ротора происходит на этапе изготовления, минимизация же смещения ротора из центра подвеса обеспечивается системой стабилизации положения ротора.
Электростатический подвес включает в себя несколько каналов стабилизации. Каждый канал стабилизации подключен к паре диаметрально противоположных электродов. Так, например, в сферическом подвесе, рис. 1, таких каналов три. Функциональная схема одного канала показана на рис. 2 и включает емкостной датчик перемещений (ДП), корректирующее и усилительное устройство (КУ) и высоковольтный формирователь регулируемых потенциалов (ВВФ) на электродах подвеса.
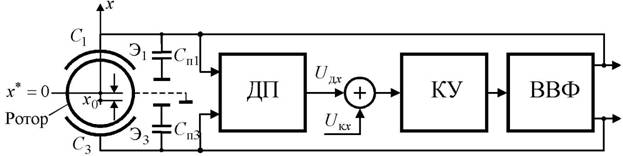
Рис. 2. Функциональная схема канала подвеса
Основным назначением контура стабилизации является автоматическое сведение к нулю (с точностью до статической ошибки) рассогласования между текущей координатой центра ротора ![]() и точкой x*, которой сопоставим несмещенное положение. В большинстве случаев x* = 0, т.е. стабилизация должна осуществляется вокруг геометрического центра подвеса. Однако на практике система стабилизации строится иным, более простым способом: задачей стабилизации при этом является сведение к нулю сигнала датчика перемещений UДX = 0(астатический подвес) или его минимизация с точностью до статической ошибки (подвес со статическим регулятором).
и точкой x*, которой сопоставим несмещенное положение. В большинстве случаев x* = 0, т.е. стабилизация должна осуществляется вокруг геометрического центра подвеса. Однако на практике система стабилизации строится иным, более простым способом: задачей стабилизации при этом является сведение к нулю сигнала датчика перемещений UДX = 0(астатический подвес) или его минимизация с точностью до статической ошибки (подвес со статическим регулятором).
В электростатических подвесах нашли применение в основном мостовые и резонансные датчики. Для измерения перемещений используется высокочастотный сигнал, отличающийся по частоте на два и более порядка от силового сигнала. В ряде работ, относящихся к исследованию емкостных датчиков перемещений электростатических подвесов, в частности в работе [2], показано, что сигнал датчика имеет структуру
| (1) |
где kдx - масштабный коэффициент (крутизна), а Uдx0 - ненулевой сигнал датчика.
Ненулевой сигнал датчика объясняется [2], в основном, неравенством паразитных емкостей![]() , шунтирующих ротор электродные емкости C1 и C3, рис. 2. Паразитные емкости включают в себя емкости монтажа, емкости p-n переходов, емкости кабеля, соединяющего прибор с датчиком, и являются величинами соизмеримыми с ротор-электродными емкостями.
, шунтирующих ротор электродные емкости C1 и C3, рис. 2. Паразитные емкости включают в себя емкости монтажа, емкости p-n переходов, емкости кабеля, соединяющего прибор с датчиком, и являются величинами соизмеримыми с ротор-электродными емкостями.
Основным способом компенсации смещения нуля до сих пор являлось дополнительное симметрирование плеч датчика по паразитным емкостям.
Представим выходной сигнал датчика (1) в виде
| (2) |
где ![]() - можно трактовать как смещение нуля датчика.
- можно трактовать как смещение нуля датчика.
Оценки, приведенные в [2], показывают, что на 1 пФ рассогласования паразитных емкостей приходится примерно 0,5 - 1 мкм смещения нуля датчика. Как уже отмечалось ранее, система стабилизации положения ротора построена так, чтобы свести к нулю сигнал датчика перемещений ![]() . Наличие ненулевого сигнала датчика приводит к тому, что стабилизация ротора происходит не вокруг геометрического центра подвеса x* = 0, рис. 2, а вокруг электрического нуля датчика x= - x0.
. Наличие ненулевого сигнала датчика приводит к тому, что стабилизация ротора происходит не вокруг геометрического центра подвеса x* = 0, рис. 2, а вокруг электрического нуля датчика x= - x0.
Известные методики симметрирования основаны на использовании эталонных емкостей. К датчику перемещений вместо электродов прибора![]() , рис. 2, подключаются одинаковые эталонные емкости
, рис. 2, подключаются одинаковые эталонные емкости ![]() , равные расчетным значениям ротор-электодных емкостей при центральном положении ротора
, равные расчетным значениям ротор-электодных емкостей при центральном положении ротора ![]() . На выходе датчика измеряется ненулевой сигнал Uдx0, а затем в канал стабилизации, рис. 2, вводится компенсирующий сигнал
. На выходе датчика измеряется ненулевой сигнал Uдx0, а затем в канал стабилизации, рис. 2, вводится компенсирующий сигнал ![]() , минимизирующий смещение нуля. Погрешности данной методики очевидны.
, минимизирующий смещение нуля. Погрешности данной методики очевидны.
Во-первых, невозможно точно подобрать равными друг другу эталонные емкости. Даже использование прецизионных емкостей и их предварительный отбор не позволяет подобрать эталонные емкости точнее 0,1 пФ. Методика компенсации может быть немного усовершенствована, чтобы минимизировать влияние разброса эталонных емкостей. Для этого проводятся два измерения. В первом измерении устанавливают ![]() и измеряют смещение нуля
и измеряют смещение нуля![]() , затем меняют эталонные емкости местами так, что
, затем меняют эталонные емкости местами так, что ![]() и измеряют смещение нуля
и измеряют смещение нуля ![]() . Компенсирующий сигнал устанавливают как среднее между
. Компенсирующий сигнал устанавливают как среднее между ![]() .
.
Во-вторых, смещение нуля, как было показано в [2], нелинейно зависит не только от паразитных емкостей, но и от реальных величин ротор-электродных емкостей при центральном положении ротора![]() , а последние не могут быть точно измерены, а могут быть лишь вычислены на основе математической модели подвеса. Кроме того, постоянные, не зависящие от смещения ротора, значения ротор-электродных емкостей
, а последние не могут быть точно измерены, а могут быть лишь вычислены на основе математической модели подвеса. Кроме того, постоянные, не зависящие от смещения ротора, значения ротор-электродных емкостей ![]() могут быть не равны друг другу (а их эталонные аналоги подбираются равными) из-за конструктивных особенностей прибора.
могут быть не равны друг другу (а их эталонные аналоги подбираются равными) из-за конструктивных особенностей прибора.
Подводя итог сказанному, можно утверждать, что существующие способы компенсации ненулевого сигнала емкостного датчика перемещений не позволяют совместить электрический ноль датчика и геометрический центр подвеса точнее нескольких десятых долей микрометра.
Для более точной компенсации необходимо получить сигнал об истинном смещении ротора относительно геометрического центра подвеса, а не о его смещении относительно электрического нуля датчика. Один из путей решения этой проблемы предложен в работе [3], где используется информация с ортогональных осей подвеса при построении двухконтурной системы стабилизации положения ротора. Используем подход, описанный в [3], для другой цели, а именно – минимизации ненулевого сигнала датчика перемещений. Для математического обоснования данного метода рассмотрим упрощенное (пренебрегаем в силу малости взаимными коэффициентами электростатической индукции и потенциалом ротора) выражение проекции силовой характеристики трехосного сферического электростатического подвеса на ось x, полученное в работе [4]
| (3) |
В выражении (3) ![]() - регулируемые потенциалы на электродах подвеса,
- регулируемые потенциалы на электродах подвеса, ![]() - нормированные (по отношению к зазору hэлектрод-ротор при центральном положении ротора) смещения ротора из центра подвеса.
- нормированные (по отношению к зазору hэлектрод-ротор при центральном положении ротора) смещения ротора из центра подвеса.
![]() … и.т.д. – собственные коэффициенты электростатической индукции сферического подвеса. Полные выражения для коэффициентов электростатической индукции в функции смещения ротора из центра подвеса составляют модель электростатической опоры как системы заряженных проводников и получены в работе [5].
… и.т.д. – собственные коэффициенты электростатической индукции сферического подвеса. Полные выражения для коэффициентов электростатической индукции в функции смещения ротора из центра подвеса составляют модель электростатической опоры как системы заряженных проводников и получены в работе [5].
Законы управления потенциалами ![]() , на электродах зависят от типа подвеса (подвес на постоянном токе, переменном токе, импульсный подвес с ШИМ и.т.д.) и строятся таким образом, чтобы обеспечить минимальный наведенный потенциал ротора. Так, например, для подвеса на постоянном токе законы управления целесообразно формировать в виде [4]
, на электродах зависят от типа подвеса (подвес на постоянном токе, переменном токе, импульсный подвес с ШИМ и.т.д.) и строятся таким образом, чтобы обеспечить минимальный наведенный потенциал ротора. Так, например, для подвеса на постоянном токе законы управления целесообразно формировать в виде [4]
| (4) |
|
где ![]() - опорное напряжение,
- опорное напряжение, ![]() - приращения потенциалов по осям x, y, zсоответственно, устанавливаемые на основе сигналов с датчиков перемещений этих осей.
- приращения потенциалов по осям x, y, zсоответственно, устанавливаемые на основе сигналов с датчиков перемещений этих осей.
При центральном положении ротора потенциалы на электродах оси xравны ![]() , на электродах осей y, zпотенциалы имеют противоположный знак
, на электродах осей y, zпотенциалы имеют противоположный знак ![]() .Такая начальная фазировка потенциалов электродов обеспечивает нулевой наведенный потенциал ротора при его нахождении в центре подвеса и незначительное отклонение от нуля при смещениях.
.Такая начальная фазировка потенциалов электродов обеспечивает нулевой наведенный потенциал ротора при его нахождении в центре подвеса и незначительное отклонение от нуля при смещениях.
Рассматривая законы управления потенциалами в форме (4), перепишем (3) как
| (5) |
Проанализируем более подробно отдельные составляющие выражения (5). Первое слагаемое ![]() , пропорциональное управлению
, пропорциональное управлению ![]() по оси x – основная стабилизирующая составляющая силовой характеристики, за счет которой и обеспечивается устойчивое взвешивание ротора. Второе слагаемое
по оси x – основная стабилизирующая составляющая силовой характеристики, за счет которой и обеспечивается устойчивое взвешивание ротора. Второе слагаемое ![]() , пропорциональное смещению x, дестабилизирующая составляющая, имеющая противоположный знак по отношению к первой составляющей. Третье слагаемое
, пропорциональное смещению x, дестабилизирующая составляющая, имеющая противоположный знак по отношению к первой составляющей. Третье слагаемое ![]() зависит от произведения смещения по оси x на квадрат управления
зависит от произведения смещения по оси x на квадрат управления ![]() по этой же оси.
по этой же оси.
Для нас особый интерес составляет последнее, четвертое слагаемое ![]() . Оно содержит произведения от смещения по оси x на квадраты управлений
. Оно содержит произведения от смещения по оси x на квадраты управлений ![]() по смежным осям yи z соответственно. Если выставить ось x прибора в горизонтальное положение (с использованием современных оптических делительных головок это можно сделать достаточно точно) то возмущающее воздействие от веса ротора по оси x становится практически нулевым. Центр ротора установится в электрическом нуле датчика
по смежным осям yи z соответственно. Если выставить ось x прибора в горизонтальное положение (с использованием современных оптических делительных головок это можно сделать достаточно точно) то возмущающее воздействие от веса ротора по оси x становится практически нулевым. Центр ротора установится в электрическом нуле датчика ![]() , а четвертое слагаемое примет вид
, а четвертое слагаемое примет вид
| (6) |

Хотя составляющая силы (6) и пропорциональна смещению центра x0, выделить ее из общего выражения силы (5) не представляется возможным. Введем к канал стабилизации по оси y синусоидальное возбуждающее воздействие ![]() . Очевидно, что в канале y установятся вынужденные колебания ротора
. Очевидно, что в канале y установятся вынужденные колебания ротора ![]() с частотой возбуждения. Приращение потенциалов
с частотой возбуждения. Приращение потенциалов ![]() на электродах оси yпри наличии в канале возбуждающего сигнала будет пропорционально и сигналу датчика перемещений
на электродах оси yпри наличии в канале возбуждающего сигнала будет пропорционально и сигналу датчика перемещений ![]() и сигналу возбуждения
и сигналу возбуждения ![]()
![]()
а квадрат приращения ![]() будет пропорционален квадрату сигнала возбуждения
будет пропорционален квадрату сигнала возбуждения ![]() . Учитывая, что
. Учитывая, что ![]() , можно утверждать, что в проекции (6) силы на ось x появится составляющая удвоенной частоты
, можно утверждать, что в проекции (6) силы на ось x появится составляющая удвоенной частоты ![]() , амплитуда которой пропорциональна смещению x0. Под действием этой составляющей в канале x установятся вынужденные колебания удвоенной частоты. Они могут быть отфильтрованы и использованы для выработки сигнала, компенсирующего смещение нуля x0.
, амплитуда которой пропорциональна смещению x0. Под действием этой составляющей в канале x установятся вынужденные колебания удвоенной частоты. Они могут быть отфильтрованы и использованы для выработки сигнала, компенсирующего смещение нуля x0.
Один из вариантов выработки компенсирующего сигнала представлен на функциональной схеме, рис. 3. Здесь показаны только каналы подвеса xи y. Генератор синусоидального сигнала вводит в канал y возбуждающий синусоидальный сигнал на частоте ![]() . При наличии смещения нуля x0, в сигнале датчика
. При наличии смещения нуля x0, в сигнале датчика ![]() канала x появляется составляющая удвоенной частоты, которая отфильтровывается полосовым фильтром (ПФ) с центральной частотой
канала x появляется составляющая удвоенной частоты, которая отфильтровывается полосовым фильтром (ПФ) с центральной частотой ![]() . После усилителя (У) сигнал подается на фазочувствительный выпрямитель (ФЧВ). Выпрямленный сигнал
. После усилителя (У) сигнал подается на фазочувствительный выпрямитель (ФЧВ). Выпрямленный сигнал ![]() пропорционален смещению нуля x0, а его знак несет информацию о направлении смещения.
пропорционален смещению нуля x0, а его знак несет информацию о направлении смещения.
Компенсирующий сигнал ![]() вырабатывается путем интегрирования (ИНТ) выпрямленного сигнала
вырабатывается путем интегрирования (ИНТ) выпрямленного сигнала

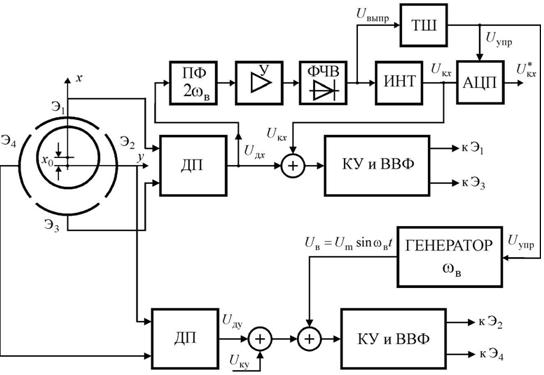
Рис. 3. Схема получения компенсирующего сигнала
Интегрирование начинается в момент включения возбуждающего генератора![]() . По мере интегрирования воздействие нарастающего компенсирующего сигнала
. По мере интегрирования воздействие нарастающего компенсирующего сигнала ![]() приводит к уменьшению смещения нуля x0 и снижению величины
приводит к уменьшению смещения нуля x0 и снижению величины![]() . При снижении
. При снижении ![]() до некоторого минимального порогового значения, триггер Шмидта (ТШ) вырабатывает (в момент времени
до некоторого минимального порогового значения, триггер Шмидта (ТШ) вырабатывает (в момент времени ![]() ) управляющий сигнал
) управляющий сигнал ![]() , отключающий генератор. Этот же сигнал запускает аналогово-цифровой преобразователь (АЦП), преобразующий в цифровую форму
, отключающий генератор. Этот же сигнал запускает аналогово-цифровой преобразователь (АЦП), преобразующий в цифровую форму ![]() итоговое компенсирующее воздействие.
итоговое компенсирующее воздействие.
Аналогичным образом (путем введения возбуждения в каналы xи z) могут быть установлены величины компенсирующих сигналов ![]() .
.
Оценим уровень сигналов, возникающих при воздействии синусоидального возмущения, для подвеса, имеющего следующие основные параметры: радиус ротора α = 20мм, зазор при центральном положении ротора h = 120 мкм, угловой размер электрода ![]() , масса ротора
, масса ротора ![]() , опорное напряжение на электродах
, опорное напряжение на электродах ![]() , линейная зона регулирования по оси x -
, линейная зона регулирования по оси x - ![]() , по осям yи z -
, по осям yи z - ![]() .
.
Оценка проводилась с использованием нелинейной многосвязной модели подвеса, выполненной в среде моделирования Симулинк, пакета Матлаб 2006. В канал подвеса x вводилось возбуждение с амплитудой 0.25 В и частотой ![]() , рис. 4 а, что приводило к вынужденным колебаниям ротора по оси x с амплитудой в 10 мкм. В канале y устанавливалось смещение нуля
, рис. 4 а, что приводило к вынужденным колебаниям ротора по оси x с амплитудой в 10 мкм. В канале y устанавливалось смещение нуля ![]() мкм, а в канале z– точно такое же смещение противоположного знака
мкм, а в канале z– точно такое же смещение противоположного знака ![]() мкм. Отклики удвоенной частоты в каналах yи z, дополнительно усиленные в 5 ·104 раз приведены на рис. 4 б, в соответственно.
мкм. Отклики удвоенной частоты в каналах yи z, дополнительно усиленные в 5 ·104 раз приведены на рис. 4 б, в соответственно.

Рис. 4. Результаты имитационного моделирования
Выводы. Проведенные расчеты и результаты моделирования показывают, возможность и целесообразность применения данной методики для прецизионной выставки нулей емкостных датчиков перемещений электростатических подвесов.
СПИСОК ЛИТЕРАТУРЫ
1. Мартыненко Ю. Г. Движение твердого тела в электрических и магнитных полях. М.: Наука, 1988.
2. С. А. Васюков, Г. Ф. Дробышев. Алгоритмы управления потенциалами на электродах электростатического подвеса//Вестник МГТУ им. Н. Э. Баумана. Сер. Приборостроение.-2007.- №2.-С.69-81.
3. Пат. 3954024 США, МКИ G16C 19/30. Automatic adaptive centering apparatus for electrically supported inertial instruments / R. S. Staats (США); Honeywell Ink. (США) - № 518028; Заявлено 25.10.74; Опубл. 04.05.76; НКИ 74. 5. 41.
4. С. А. Васюков. О влиянии законов управления потенциалами на силовые характеристики сферического электростатического подвеса//Наука и образование. Инженерное образование. Электронное научное издание.- www. .ru.- октябрь, 2007, 25 С.
5. С. А. Васюков, Г. Ф. Дробышев. Распределение потенциала и коэффициенты электростатической индукции в сферическом электростатическом подвесе //Вестник МГТУ им. Н. Э. Баумана. Сер. Фундаментальные науки.-2007.-№ 2.-С.101-112.
Публикации с ключевыми словами: электростатический подвес, потенциал ротора, случайный заряд
Публикации со словами: электростатический подвес, потенциал ротора, случайный заряд
Смотри также:
- 77-48211/620477 Схемотехника и особенности применения импульсных электростатических подвесов в приборах систем управления движением
- 77-30569/250528 О возможности цифрового регулирования в электростатических подвесах чувствительных элементов гироскопов и акселерометров
- 77-48211/618897 Схемотехника электростатических подвесов на переменном токе и особенности их применения в приборах систем управления движением
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||