научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 12, декабрь 2011
УДК 62-522.2
МГТУ им. Н.Э. Баумана
1. Введение
С ростом цен на топливо всё более актуальной становится проблема повышения энергетической эффективности мобильных машин.
Традиционно применяются различные схемы гидравлических трансмиссий с регулируемым насосом и одним или несколькими гидромоторами. Возможны варианты их подключения к колёсам как непосредственно, так и (с целью увеличения КПД) через суммирующую механическую передачу. Меньшее применение находит схема, в которой каждое колесо может управляться независимо посредством распределителей с пропорциональным электромагнитным управлением. Данный вариант гидравлической схемы вкупе с электронной системой управления позволяет значительно улучшить управляемость транспортным средством. Одним из важнейших факторов, являющимся ограничением применения подобной схемы, является проблема энергетической эффективности.
2. Определение КПД гидропривода при различных способах регулирования.
Рассмотрим решение данной задачи на примере упрощённой гидравлической схемы привода колёс мобильной машины (рис. 1).

Рисунок 1. Принципиальная гидравлическая схема мобильной машины повышенной проходимости с независимым управлением колёс
В случае прямолинейного равномерного движения, подача будет делиться равномерно между всеми 4-мя гидромоторами. В этом случае, задача приобретает следующую постановку (см. рис. 2):
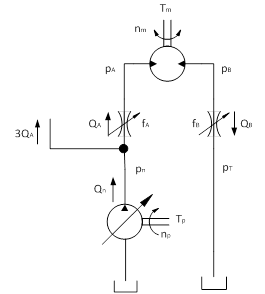
Рисунок 2. Расчётная схема.
Возможны следующие варианты управления приводом:
· Управление изменением рабочего объёма насоса;
· Управление изменением проходных сечений щелей золотниковых распределителей с регулятором давления насоса при поддержании в линии нагнетания заданного давления.
Для сравнения данных режимов управления, необходимо математическое описание энергетических потерь в приводе. Можно выделить следующие основные источники энергетических потерь в гидроприводе:
· потери в гидронасосе;
· потери в гидродвигателе (гидромотор);
· потери в аппаратуре (гидрораспределители, дроссели, клапаны);
· потери в гидравлических линиях.
Используем универсальные характеристики гидромашин, которые доступны в документации к гидромашинам многих производителей.
2.1 Характеристика гидромотора:
В данной статье в качестве примера выбран героторный гидромотор фирмы SauerDanfossOMS125, который обладает приемлемыми характеристиками при малых оборотах и допускает соединение с выходным звеном без использования редуктора, что актуально для привода колёс мобильных машин небольшой мощности (до 50 кВт).
Универсальная характеристика, представленная в документации на гидромотор, выглядит следующим образом (см. рис. 3):
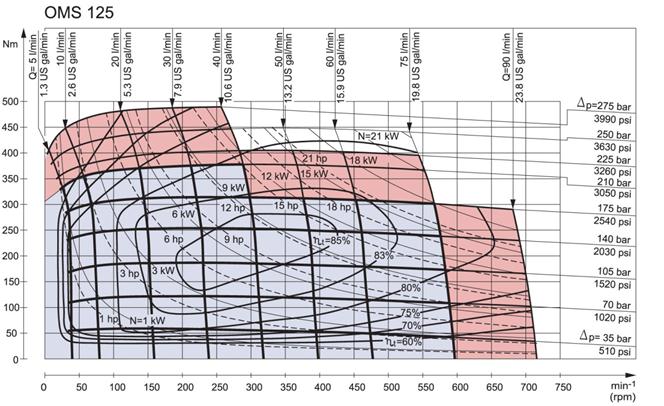
Рисунок 3. Универсальная характеристика гидромотора
На данной диаграмме представлено семейство кривых зависимости развиваемого гидромотором момента и его оборотов от перепада давлений (горизонтальные кривые) и расхода (вертикальные кривые).
Функция полного КПД гидромотора на этой диаграмме составляется следующим образом

Функции ![]() и
и ![]() подлежат определению посредством аппроксимации экспериментальных данных функциями
подлежат определению посредством аппроксимации экспериментальных данных функциями ![]() , и
, и ![]() , и выражения из них соответствующих аргументов.
, и выражения из них соответствующих аргументов.
Данные зависимости с приемлемой точностью описываются экспоненциальными функциями:


где:
![]() – рабочий объём гидромотора
– рабочий объём гидромотора
![]() – коэффициент вязкого трения
– коэффициент вязкого трения
![]() – момент трения при номинальном давлении
– момент трения при номинальном давлении
![]() – момент трения, проявляющийся на малых оборотах при номинальном давлении
– момент трения, проявляющийся на малых оборотах при номинальном давлении
![]() – коэффициент, характеризующий степень «провала» характеристики на малых оборотах
– коэффициент, характеризующий степень «провала» характеристики на малых оборотах
![]() – коэффициент утечек при номинальном расходе
– коэффициент утечек при номинальном расходе
![]() – утечки, проявляющиеся при больших моментах
– утечки, проявляющиеся при больших моментах
![]() – коэффициент, характеризующий степень «провала» характеристики при больших моментах
– коэффициент, характеризующий степень «провала» характеристики при больших моментах
Перечисленные коэффициенты подбираются таким образом, чтобы обеспечить наименьшее отклонение полученных аналитических функций в каждой экспериментальной точке. Тогда из выражений (1) и (2) следует:


При подстановке выражений (4) и (5) в выражение (1), будет получено аналитическое выражение, аппроксимирующее зависимость КПД гидромотора от момента на валу и оборотов (см. рис. 4):

Рисунок 4. График зависимости КПД гидромотора от развиваемого момента и угловой скорости
Для дальнейших расчётов удобно так же принять:


где:
![]() – объёмный и механический КПД гидромотора соответственно
– объёмный и механический КПД гидромотора соответственно
2.2 Характеристика насоса:
В качестве примера насоса, был выбрал аксиально-поршневой насос с наклонным диском A4VSOфирмы BoschRexroth. В документации на него предлагается определять КПД по представленным экспериментальным зависимостям подачи и потребляемой мощности от давления при различных оборотах (см. рис. 5):

Рисунок 5. Характеристика насоса
КПД насоса в этом случае определяется следующим образом:

где:
![]() – подача насоса
– подача насоса
![]() – давление
– давление
![]() – мощность на валу насоса
– мощность на валу насоса
Подача насоса и потребляемая мощность в этом случае хорошо аппроксимируется прямыми:
![]()

где:
![]() – максимальный рабочий объём насоса
– максимальный рабочий объём насоса
![]() – параметр регулирования насоса (0..100%)
– параметр регулирования насоса (0..100%)
![]() – угловая скорость вала насоса
– угловая скорость вала насоса
![]() – коэффициент утечек насоса
– коэффициент утечек насоса
![]() – момент сопротивления при давлении p=0
– момент сопротивления при давлении p=0
При подстановке выражений (9) и (10) в выражение (8), будет получена аналитическая функция КПД насоса в зависимости от параметра регулирования х и давления p. Она имеет вид (см. рис.6):

Рисунок 6. График зависимости КПД насоса от давления и параметра регулирования
Описание потерь в распределительной аппаратуре необходимо проводить для разных режимов управления.
2.3 Управление изменением рабочего объёма насоса
В данном случае золотниковые распределители полностью открыты, а изменение скорости осуществляется за счёт изменения рабочего объёма насоса.
Полный КПД данной системы вычисляют следующим образом:

Для получения зависимости полного КПД от скорости машины и момента на колёсах, необходимо вывести функцию момента на валу насоса ![]() (при скорости его вращения
(при скорости его вращения ![]() ) от скорости вращения
) от скорости вращения ![]() и момента на валу гидромотора
и момента на валу гидромотора ![]() . Она может быть получена из системы уравнений (см. рисунок 2):
. Она может быть получена из системы уравнений (см. рисунок 2):
![]()
![]()

![]()
![]()
![]()
![]()
![]()

где:
![]() – конструктивный коэффициент
– конструктивный коэффициент
![]() – коэффициент истечения кромок золотникового распределителя
– коэффициент истечения кромок золотникового распределителя
![]() - плотность рабочей жидкости
- плотность рабочей жидкости
![]() – площади открытия золотниковых распределителей
– площади открытия золотниковых распределителей
Задавшись радиусом колёс ![]() и приняв
и приняв ![]() , можно построить функцию
, можно построить функцию ![]() , где v – скорость равномерного прямолинейного движения машины (см. рис. 7).
, где v – скорость равномерного прямолинейного движения машины (см. рис. 7).
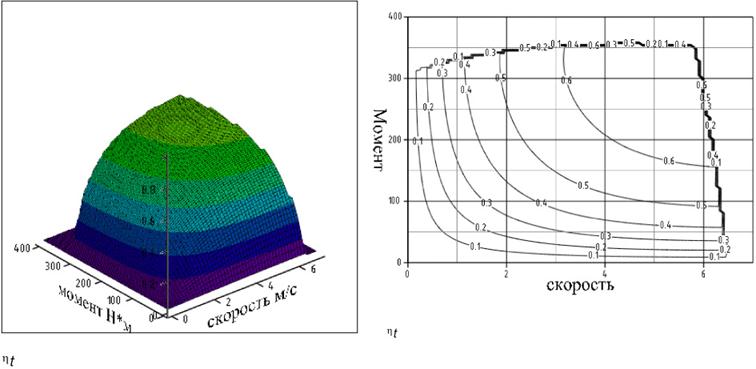
Рисунок 7. График зависимости КПД гидропривода при объёмном управлении
В данном случае полный КПД гидропривода определяется главным образом КПД гидромашин, и имеет довольно широкую область высоких значений КПД в районе больших скоростей и моментов. Ограничение по скорости зависит от максимального рабочего объёма выбранного насоса, а так же от числа питаемых гидромоторов. Ограничение по моменту связано с ограничением по давлению в системе. Стоит также отметить, что в данной модели не было учтено ограничение по мощности, характерное для гидросистем мобильных машин с ДВС.
2.4 Регулирование изменением проходных сечений щелей золотниковых распределителей с регулятором постоянного давления
Для улучшения динамических свойств привода, целесообразно применение в насосе регулятора давления. Функцией данного регулятора является изменение параметра регулирования в уравнении (16) таким образом, чтобы в системе, вне зависимости от характеристики потребителя, поддерживалось давления настройки в пределах от ![]() (см. рисунок 8). В данном случае параметр регулирования в зоне действия регулятора определяется следующей кусочно-линейной функцией:
(см. рисунок 8). В данном случае параметр регулирования в зоне действия регулятора определяется следующей кусочно-линейной функцией:

где
![]() – давление настройки регулятора
– давление настройки регулятора
![]() – давление, соответствующее х=0
– давление, соответствующее х=0

Рисунок 8. Характеристика регулятора давления насоса.
Для получения функции полного КПД в зависимости от момента и угловой скорости гидромотора, необходимо получить функцию площади дросселирующих щелей от данных параметров. Задавшись ![]() , можно вывести данную зависимость из условия равенства
, можно вывести данную зависимость из условия равенства ![]() .
.
После подстановки уравнения (19) в (16) и выражения ![]() , получим:
, получим:

Имея зависимости ![]() и
и ![]() , можно определить
, можно определить ![]() , а, следовательно, и
, а, следовательно, и ![]() , которое подставляется в выражение для полного КПД гидропривода с дроссельным управлением. График будет выглядеть следующим образом (рис. 9):
, которое подставляется в выражение для полного КПД гидропривода с дроссельным управлением. График будет выглядеть следующим образом (рис. 9):
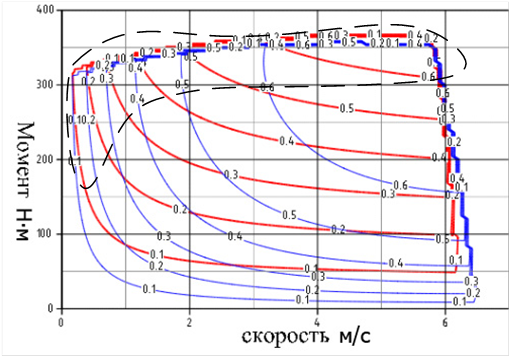
Рисунок 9. График зависимости КПД гидропривода от скорости движения мобильной машины и развиваемого момента на колёсах при управлении изменением проходных сечений дросселей (красные линии) и изменением рабочего объёма насоса (синии линии).
Для сравнения синими линиями на графике обозначен также график зависимости КПД при управлении изменением рабочего объёма насоса. Заметно, что в обширной области диаграммы, дроссельный способ управления уступает объёмному по энергетической эффективности. Это объясняется тем, что при одном и том же давлении нагрузки и скорости, в случае дроссельного управления, распределитель находится под большим перепадом, нежели при объёмном, а следовательно, рассеивает больше энергии. Однако в области больших моментов это различие минимально (выделено пунктиром), что делает этот режим управления более выгодным, чем объёмный в том случае, когда для повышения проходимости и выполнения различных манипуляций требуется точное управление. К тому же, в области малых скоростей, значение потребляемой мощности не велико, а следовательно и суммарное значение потерь энергии будет незначительным.
Управления с использованием регулятора постоянного перепада совмещает в себе достоинства предыдущих 2-х методов.
2.5 Регулирование изменением проходных сечений щелей золотниковых распределителей с регулятором постоянного перепада давлений
Данный регулятор устанавливает подачу насоса таким образом, что перепад давлений на выбранной кромке одного из распределителей всегда постоянен. В этом случае, подача определяется только площадью открытия распределителя. В случае с несколькими потребителями регулирование ведётся по потребителю с наибольшей нагрузкой и получило название LoadSensing.
Функция параметра регулирования от давления при ![]() выглядит следующим образом (см. рис. 10):
выглядит следующим образом (см. рис. 10):

![]() – в данном случае – поддерживаемый перепад давлений на распределителе.
– в данном случае – поддерживаемый перепад давлений на распределителе.
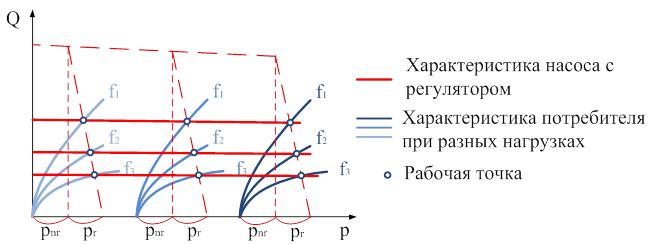
Рисунок 10. Характеристика насоса с регулятором перепада
Функция ![]() определяется по аналогии с предыдущим регулятором и приобретает вид:
определяется по аналогии с предыдущим регулятором и приобретает вид:

Как видно из выражения (22), при использовании данного типа регулятора, подача насоса определяется преимущественно площадью открытия золотниковой щели и лишь в малой степени (через коэффициент утечек ![]() ) зависит от нагрузки на гидромоторе.
) зависит от нагрузки на гидромоторе.
График полного КПД гидропривода в этом случае выглядит следующим образом (см. рис. 11):

Рисунок 11. График зависимости КПД гидропривода от скорости движения мобильной машины и развиваемого момента на колёсах при управлении с регулятором перепада (красные линии) и управлении изменением рабочего объёма насоса (синие линии)
Видно, что проигрыш в КПД по сравнению с управлением изменением рабочим объёмом незначителен на всех режимах. Он обусловлен лишь тем, что при полностью открытых распределителях (в первом случае) перепад давления на них меньше, чем устанавливаемое значение ![]() в третьем случае. Однако, третий способ управления позволяет осуществлять активное маневрирование как во втором случае. Ограничением является лишь то, что быстродействие регуляторов современных насосов ухудшается при низких давлениях питания, поэтому данный способ управления может быть рекомендован для машин с невысокими требованиями к динамике.
в третьем случае. Однако, третий способ управления позволяет осуществлять активное маневрирование как во втором случае. Ограничением является лишь то, что быстродействие регуляторов современных насосов ухудшается при низких давлениях питания, поэтому данный способ управления может быть рекомендован для машин с невысокими требованиями к динамике.
Проведённый анализ показывает:
1. Использование насоса с регулятором по перепаду давлений на управляющем дросселе позволяет максимально приблизить дроссельный способ управления приводом к объёмному по энергетической эффективности.
2. Использование регулятора насоса, поддерживающего постоянное давление в линии нагнетания, позволяет улучшить быстродействие системы. При этом, существует область в которой привод с данным регулятором обладает приемлемым КПД, не сильно уступающим объёмному.
Список источников:
Публикации с ключевыми словами: гидропередача, гидропривод, регулятор насоса, энергетическая эффективность, мобильная техника
Публикации со словами: гидропередача, гидропривод, регулятор насоса, энергетическая эффективность, мобильная техника
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||