научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 12, декабрь 2011
УДК 629.7.085
МГТУ им. Н.Э. Баумана
Ракеты космического назначения (РКН) серии «Союз» успешно эксплуатируются с 1963 г. На сегодняшний день они являются самым надежным и эффективным средством выведения на околоземную орбиту автоматических космических аппаратов социально-экономического, научно-исследовательского, специального назначения, а также пилотируемых и грузовых космических кораблей. Представляется, что РКН серии «Союз» на ближайшее десятилетие будут базовыми в российской системе средств выведения, а также будут занимать важное место в программах международного сотрудничества в области космоса. Так одним из самых значительных космических проектов текущего десятилетия является совместное строительство Европы и России космодрома для РКН «Союз-СТ» в французской Гвиане.
Длительная успешная эксплуатации РКН серии «Союз» во многом связана со стартовым комплексом (СК) и, в частности, с его стартовой системой (СС). Компоновка СС, конструктивные и технические решения заложенные в ее агрегатах во многом позволили СК успешно функционировать в течение 50 лет. Однако модернизации РКН «Союз», особенности месторасположения будущих космодромов, стремление наиболее полно обеспечить безопасность пуска РКН при возникновении различных нештатных ситуаций предполагают определенные изменения в агрегатах и элементах СС. Поэтому становится актуальной задача оценки резервов использования агрегатов существующей СС СК для РКН серии «Союз». Одним из важнейших этапов решения этой задачи является создание методического аппарата, который позволил бы за относительно небольшое время провести расчетный анализ агрегатов СС с целью получения оценки их общей прочности и жесткости.
Данный методический аппарат предполагает решение следующих основных задач:
1. Формирование физической модели системы «СС-РКН».
2. Определение основных расчетных случаев.
3. Определение и моделирование штатных и неблагоприятных нагрузок действующих на систему «СС-РКН» и соответствующих выбранным расчетным случаям.
4. Формирование математических моделей, описывающих поведение агрегата системы «СС-РКН» при различных расчетных случаях.
Нетрудно заметить, что центральной задачей является задача физического моделирования системы «СС-РКН».
Адекватная физическая модель системы «СС-РКН» должна с удовлетворительной точностью отражать:
1. Геометрические параметры и форму СС и РКН.
2. Реальную упруго-массовую структуру системы «СС-РКН».
3. Кинематику системы «СС-РКН».
4. Особенности взаимодействия отдельных элементов агрегата СС, отдельных агрегатов СС между собой, а также агрегатов СС и РКН.
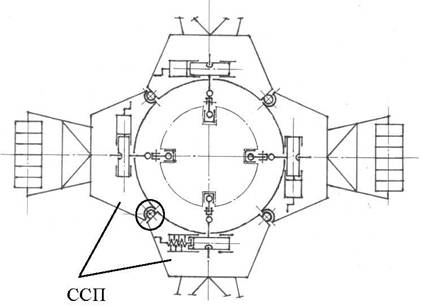
Основной несущей конструкцией стартового комплекса РКН «Союз» являются стартовая система (рис.1). Она представляет собой четыре связанные опорные конструкции, состоящие из секторов силового пояса (ССП), несущих стрел (НС), опорных ферм (ОФ) и их оснований (ООФ). ООФ размещаются на опорном кольце (ОК). На него устанавливаются также основания кабель-заправочной мачты (КЗМ), верхней кабель-мачты (ВКМ) и основания ферм агрегата обслуживания. Кроме этого, к ОК крепятся четыре устройства направляющих (УН), а также нижняя кабель - мачта (НКМ). В сведенном состоянии ОФ образуют силовой пояс, на который передаются нагрузки от РКН в период предстартовой подготовки. Раскрытие ССП осуществляется вращательным движением ОФ в начале старта РКН, что необходимо для обеспечения ее беспрепятственного движения и осуществляется под действием сил тяжести грузов (противовесов), размещаемых на конструкциях ОФ. Для снижения динамических нагрузок на конечных участках движения ОФ происходит их торможение посредством гидравлических буферов. Отвод КЗМ осуществляется за несколько секунд до начала старта РКН также под действием противовесов, размещаемых на ферме мачты, а ее торможение под действием гидробуферов, установленных на основаниях данной мачты.
Несущие конструкции агрегатов СС представляют собой пространственные комбинированные системы с распределенными параметрами. Они содержат ферменные стержневые и листовые конструкции. Физическое моделирование таких систем при наличии компьютерной техники и соответствующего программного обеспечения предпочтительнее осуществлять при помощи метода конечных элементов (МКЭ) [1]. Несмотря на то, что этот метод возник в 1950 г, возможности его применения постоянно расширяются с развитием вычислительной техники. Вследствие простоты метод получил широкой распространение и сейчас реализован во многих программных комплексах. Для удобства моделирования и снижения размерности нередко используется метод суперэлементов (МСЭ) [2]. МСЭ фактически базируется на МКЭ. В качестве элементарной части разбиения здесь выступает конечноэлементная модель – суперэлемент.

Рис. 1. Агрегаты стартового комплекса для РКН «Союз»: 1 – РКН; 2 – сектор силового пояса; 3 – опорная ферма; 4 – несущая стрела; 5 – гидробуферы торможения опорных ферм; 6– направляющие устройства; 7 – основания опорных ферм; 8 – опорное кольцо; 9 – верхняя кабель-мачта; 10 – кабель-заправочная мачта.
Применение конечноэлементного моделирования позволяет отражать:
1. Геометрические параметры и форму системы «СС-РКН» путем задания определенной подробности сетки конечноэлементного разбиения и задания соответствующей ориентации конечных элементов в пространстве.
2. Реальную упруго-массовую структуру системы «СС-РКН» путем задания соответствующих характеристик КЭ и введение в узлы модели дополнительных масс.
3. Кинематику системы «СС-РКН» и отдельных её элементов путем наложение на узлы модели соответствующих внешних связей и типов внутренних кинематических связей между узлами модели. Под внешними связями подразумевается ограничение степеней свободы узла модели. Под типом кинематической связи подразумевается задание узлам определенного количества степеней свободы друг относительно друга, что позволяет смоделировать кинематические связи типа «шарнир», «ползун» и т.д. Комбинирование различных типов кинематических связей даёт широкие возможности по моделированию различных механизмов.
4. Особенности взаимодействия отдельных элементов агрегата СС или отдельных агрегатов СС между собой, а также агрегатов СС и РКН путем введения между контактирующими узлами модели внутренних упругих и демпфирующих связей (в общем случае нелинейных). Характеристики связей представляет собой зависимость усилий, возникающих между контактирующими узлами, от взаимных перемещений узлов контакта (для упругих связей) или от их относительных скоростей (для демпфирующих связей). Используя перемножение данной характеристики на характеристику типа «0-1», зависящую от перемещения кого-либо узла модели, можно моделировать разрывной контакт между отдельными элементами агрегата СС или отдельными агрегатами СС, а также агрегатов СС и РКН.
Конечно, такое четкое соответствие необходимых требований к модели и того, что их обеспечивает довольно условно, поскольку сами требования не являются самодостаточными и должны рассматриваться в комплексе.
В качестве примера подобного моделирование можно рассмотреть систему «СС-РКН». СС представляется совокупностью определенных агрегатов. В эту совокупность входят четыре конструктивные группы – ОФ, НС, ССП, ООФ, а так же четыре УН и две НКМ. Учитывая, что жесткость ОК достаточно велика, его моделирование и последующий расчет можно проводить раздельно с рассматриваемой системой.
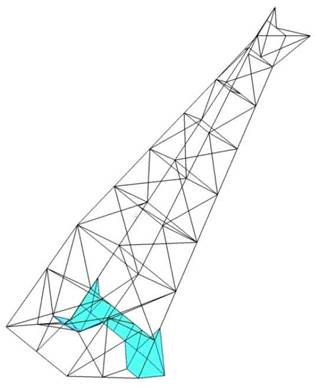
Формировать физическую модель систему «СС-РКН» рационально при помощи МСЭ. Таким образом, модель будет представлять систему, состоящую из суперэлементов. В качестве суперэлементов выступают отдельные агрегаты СС и РКН. Каждый суперэлемент представляет собой конечноэлементную модель, которая отражает реальные геометрические и упруго-массовые свойства агрегатов. В качестве примера, на рисунках рис.2…рис.6 представлены конечноэлементные модели соответственно ОФ, НС, ССП, НКМ и РКН.
Стыковка отдельных моделей осуществляется по определенным, выделенным узлам. Физическая модель системы «СС-РКН» представлена на рис. 7.
Особенности кинематики системы учитываются наложением на определенные узлы моделей внешних связей (например, на узлы ООФ, моделирующие жесткое крепление ООФ к ОК, наложены связи ограничивающие все шесть степеней свободы, (рис.8), а также заданием для определенных узлов суперэлементов соответствующего типа кинематической связи (например, НС соединена с рычагом механизма вертикального перемещения кинематической связью типа «сферический шарнир», рис.9).
Как уже отмечалось одним из требований к физической модели системы «СС-РКН» является учет особенностей взаимодействия СС и РКН. К таким взаимодействиям можно отнести:
1. Односторонний контакт между секторами силового пояса (рис.10, а);
2. Односторонний контакт между РКН и несущими стрелами (рис.10, б);
3. Двусторонний разрывной контакт между РКН и УН (рис.10, в).
Особенность контакта секторов состоит в следующем: когда РКН опирается на несущие стрелы, ее вес вызывает их сжатие. Поскольку НС связаны с ОФ, то происходит их совместный поворот до контакта секторов силового пояса между собой. В точках контакта секторов возникают реакции сжатия. При старте сила тяги ДУ компенсирует действия веса РКН и за счет противовесов ОФ (а, следовательно, НС и ССП) отводятся, тем самым контакт секторов силового пояса размыкается. Подобный контакт секторов силового пояса можно смоделировать путем введения между соответствующими узлами модели внутренней упругой односторонней связи. Характеристика связи (зависимость усилия, возникающего между контактирующими узлами, от их относительного перемещения) в графическом виде приведена на рис.11, а. Связь отражает то, что между контактирующими узлами модели может возникнуть лишь сжимающие усилие.
|
|
а | б |
Рис. 2. Моделирование агрегатов СС: а – конструктивная схема ОФ; б – конечноэлемнтная модель ОФ. | |
| |
|
|
а | б |
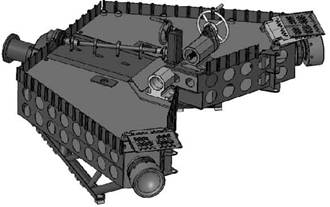
Рис. 3. Моделирование агрегатов СС: а – конструктивная схема НС; б – конечноэлемнтная модель НС. | |



|
|
а | б |
Рис. 4. Моделирование агрегатов СС: а – конструктивная схема ССП; б – конечноэлемнтная модель ССП. | |
|
|
а | б |
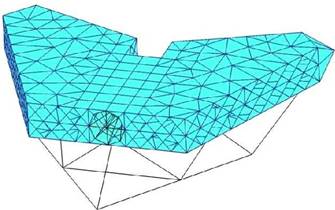
Рис. 5. Моделирование агрегатов СС: а – конструктивная схема НКМ; б – конечноэлемнтная модель НКМ. | |
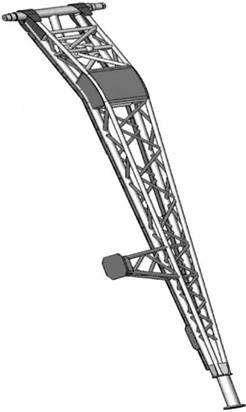

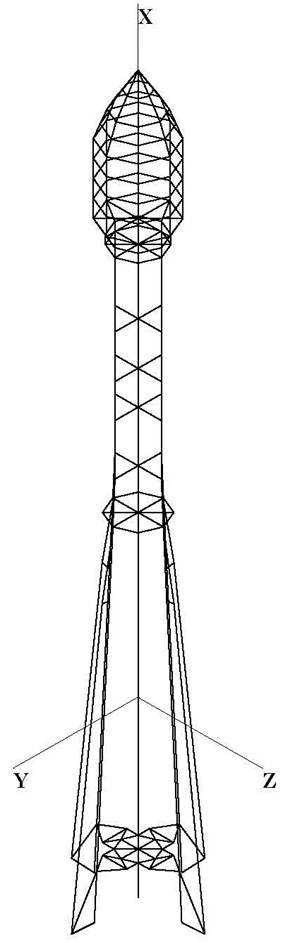
Рис. 6. Моделирование агрегатов СС: конечноэлемнтная модель РКН.

Рис. 7. Конечноэлемнтная модель системы «СС-РКН».

Рис. 8. Пример наложения внешних связей на модель ООФ.

Рис. 9. Пример задания кинематической связи между узлами модели НС.
| |
| |
| |
|
|
б | в |
Рис. 10. Пример контактирующих элементов в агрегатах СС для РКН семейства «Союз»: а – между ССП; б – между РКН и НС; в – между РКН и УН. | |


| |
|
|
б | в |
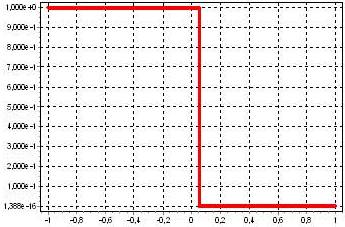
Рис. 11. Характеристики нелинейных связей: а – односторонняя характеристика; б – двухсторонняя характеристика; в – характеристика типа «1-0». | |

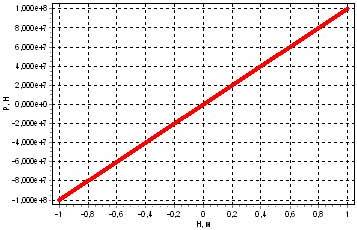
Аналогично моделируется и односторонний контакт между РКН и НС. Особенность этого контакта заключается в том, что РКН опирается на оголовки НС. В точках контакта возникают сжимающие усилия, вызванные весом РКН. При старте РКН тяга ее ДУ сначала компенсирует вес РКН, а затем с началом движения ракеты контакт РКН с НС размыкается. Характеристика связи (зависимость усилия, возникающего между контактирующими узлами, от их относительного перемещения) в графическом виде приведена на рис.11, а. Связь отражает то, что между контактирующими узлами модели может возникнуть лишь сжимающие усилие.
Контакт торцевых фитингов РКН с нижними устройствами направления имеет двусторонний характер. Усилия, возникающие между узлами контакта, могут быть вызваны либо ветровым воздействием на РКН, либо разнотягом двигателей РКН на начальном этапе старта. Разрыв контакта РКН происходит не сразу после начала движения РКН, а только после того после того, как направляющий штырь УН выйдет из кармана на боковом блоке РКН. Особенности такого взаимодействия можно смоделировать путем введения между контактирующими узлами модели внутренней упругой связи в тангенциальном направлении. Характеристика связи (зависимость усилия, возникающего между контактирующими узлами, от их относительного перемещения) в графическом виде приведена на рис.11, б. Смоделировать разрыв контакта можно путем умножения характеристики связи между контактирующими узлами на характеристику типа «0-1» (рис.11, в), зависящую от перемещения контактирующего узла модели РКН.
Внутренними нелинейными связями можно также учесть трение в узлах контакта. Такие связи могут иметь характеристику типа «сухое трение».
Приведенный подход к физическому моделированию позволяет рассмотреть все возможные расчетные случаи, соответствующие различным моментам функционирования СС на этапах подготовки к пуску и пуска РКН. Моделирование системы «СС-РКН» производилось при помощи программного комплекса «SADAS», созданного на кафедре «Стартовые ракетные комплексы» МГТУ им. Н.Э. Баумана. Результаты работы были использованы при проектировании СС для РКН «Союз-СТ» в Гвианском космическом центре.
Список литературы.
1. Зенкевич O.K. Метод конечных элементов в технике. - М.: Мир, 1975. 318 с.
2.. Метод суперэлементов в расчетах инженерных сооружений./ Постнов В.А. [и др.] Л.: Судостроение,1979. 288 с.
Публикации с ключевыми словами: метод конечных элементов, физическое моделирование, стартовая система, стартовый комплекс, метод суперэлементов, ракета космического назначения, СОЮЗ
Публикации со словами: метод конечных элементов, физическое моделирование, стартовая система, стартовый комплекс, метод суперэлементов, ракета космического назначения, СОЮЗ
Смотри также:
- Анализ и моделирование штатных и нештатных нагрузок и воздействий на агрегаты стартовой системы для РКН семейства «Союз»
- Моделирование переменных по времени и подвижных по конструкции нагрузок, вызванных газодинамическим воздействием двигательной установки ракеты космического назначения
- Расчетный анализ несущих элементов агрегатов стартового комплекса для ракеты космического назначения «Союз -2.1в»
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||