научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 12, декабрь 2011
УДК.629.526
МГТУ им. Н. Э. Баумана
На экспериментальной базе ФГУП «ММПП» Салют» создан компьютеризированный комплекс для испытаний подвесных лодочных моторов мощностью до 5-и л.с. Комплекс предназначен для автоматизации приемо-сдаточных и периодических испытаний, а также для проведения в автоматизированном режиме ряда специальных испытаний лодочных моторов.
На рис. 1 представлена функциональная схема автоматизированного испытательного комплекса (АИК) модели АИК-1, который имеет два уровня: верхний уровень 1 и нижний уровень 2.
Верхний уровень 1 включает в себя автоматизированное рабочее место (АРМ) 3 оператора – испытателя верхнего уровня, программируемый логический контроллер (ПЛК) 4 и универсальную панель 5 оператора (UniOP) испытателя нижнего уровня.
В состав нижнего уровня 2 входят: гидромеханическая, информационно – измерительная и электромашинная подсистемы. Нижний уровень также включает в себя: привод 6 рукоятки газа лодочного мотора (ЛМ), устройство 7 планового и аварийного выключения двигателя внутреннего сгорания (ДВС) лодочного мотора, участок 8 подготовки лодочных моторов, стапель 9 для установки моторов. Кроме того в нижний уровень входят, не показанные на рис. 1, подсистемы: электрошкаф испытательного комплекса, вытяжная вентиляция, средства пожаротушения, электро – и гидро –коммуникации.
Гидромеханическая подсистема испытательного комплекса содержит испытательную емкость (ванну) 10 и стойку 11, снабженную силоизмерительной транцевой доской (не показана), на которую устанавливается испытываемый лодочный мотор 12.
Информационно – измерительная подсистема испытательного комплекса содержит измерители 13 … 21 физических величин лодочного мотора и окружающей среды (соответствие номеров измерителей на рис. 1 измеряемым физическим величинам представлено ниже по тексту и в табл. 1), измерительный блок 22 (вторичные преобразователи и четыре табло цифровой индикации) и дополнительный топливный бак 23, предназначенный для измерения массы расходуемого топлива.
Электромашинная подсистема (её основа – скоростной следящий привод переменного тока) испытательного комплекса включает в себя: асинхронный электродвигатель 24, оснащенный датчиками угла и скорости (не показаны), усилитель 25 мощности, блок 26 балластных резисторов и пульт 27 местного управления.
Автоматизированное рабочее место (АРМ) 3 оператора – испытателя верхнего уровня выполняет следующие основные функции:
§ дискретное управление испытательным процессом;
§ мониторинг процесса испытаний;
§ архивация и протоколирование событий испытаний.
Автоматизированное рабочее место АРМ 3 комплекса АИК-1 состоит из персонального компьютера ПК, принтера и источника ИБП бесперебойного питания.
Прикладное программное обеспечение персонального компьютера ПК выполнено на основе SCADA – пакета FIX¢32 фирмы «Intellution» (США).
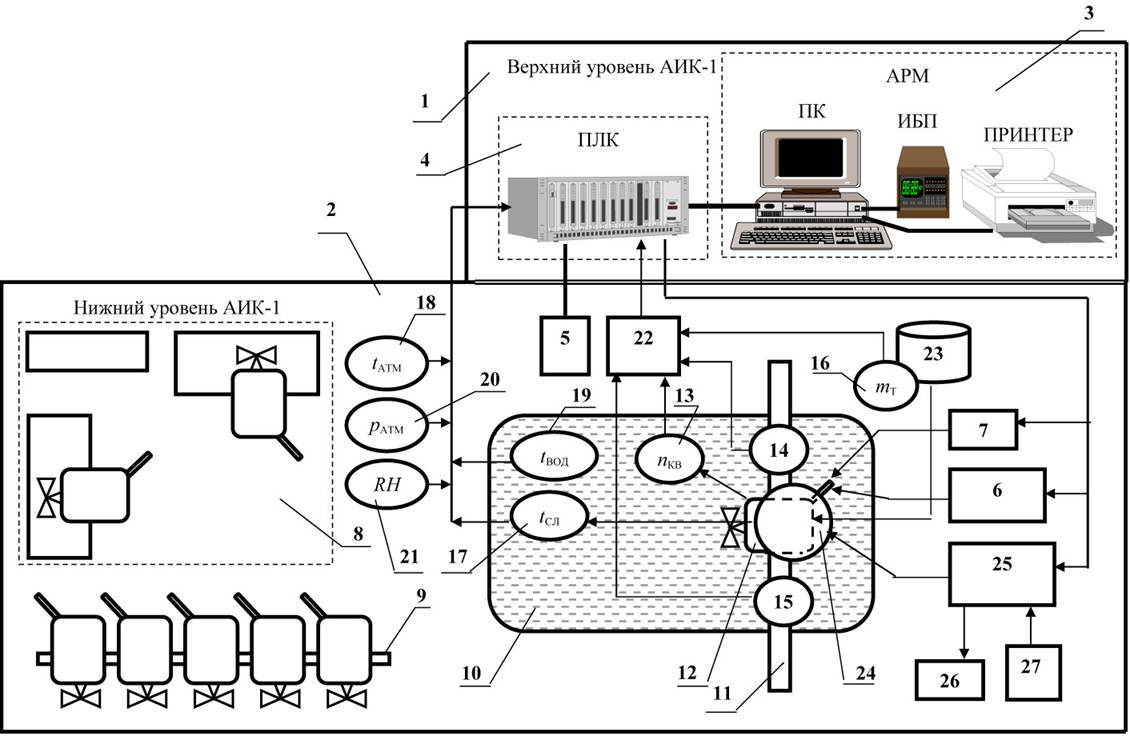
Рис. 1. Функциональная схема автоматизированного испытательного комплекса АИК-1
Основные функции программируемого логического контроллера (ПЛК) 4:
§ оперативное управление испытательным процессом;
§ сбор информации, поступающей от информационно – измерительной подсистемы нижнего уровня;
§ фильтрация, линеаризация и масштабирование входных аналоговых сигналов;
§ формирование управляющих воздействий, подаваемых на исполнительные органы нижнего уровня (электромашинная подсистема, привод 6 рукоятки газа, устройство 7 выключения двигателя внутреннего сгорания лодочного мотора);
§ обмен информацией с панелью 5 UniOP оператором – испытателем нижнего уровня.
Контроллер ПЛК 4 представляет собой промышленный РС – совместимый контроллер, выполненный на базе модулей серии ЭК-2000 фирмы «ЭМИКОН» (г. Москва). Конфигурация контроллера набирается из отдельных модулей, необходимых для решения поставленной задачи. В состав контроллера ПЛК 4 входят следующие модули:
§ плата кроссовая CR-04;
§ модуль центральный CPU-03A;
§ преобразователь интерфейса CIM-232NI (2 шт.);
§ модуль ввода-вывода дискретных сигналов DIO-04A;
§ модуль конверторов OR-04A;
§ модуль конверторов IR-04A;
§ модуль вывода аналоговых сигналов АО-01А;
§ модуль ввода аналоговых сигналов AI-04A;
§ модуль расширения ввода аналоговых сигналов EAI-03A;
§ блок питания нестабилизированный SU-06;
§ модуль питания PU-01A.
Программное обеспечение (ПО) ПЛК 4 разработано с использованием интегрированной среды разработки ПО «Win – Designer» (фирма «ЭМИКОН»). Связь контроллера с компьютером и панелью 5 оператора осуществляется по интерфейсам RS-232 с использованием протокола «Modbus».
Основные функции универсальной панели (UniOP) 5 оператора – испытателя нижнего уровня:
§ получение оператором – испытателем нижнего уровня 2 от вычислительных средств верхнего уровня 1 комплекса (от ПЛК и ПК) информации о текущем состоянии испытательного процесса, о действиях, требуемых от оператора на данном этапе испытаний, и о возникающих нештатных и аварийных ситуациях (информация поступает на жидкокристаллический дисплей и подсвечиваемые клавиши панели UniOP);
§ подтверждение оператором выполнения требуемых действий с помощью клавиатуры панели.
Из множества различных моделей панели UniOP использована панель CP11G-04 фирмы «Sitek» S.p.A. (Италия).
Программное обеспечение панели 5 оператора разработано на основе интегрированной среды разработки ПО «UniOP – Designer» (фирма «Sitek» S.p.A.).
Привод 6 рукоятки газа ЛМ предназначен для автоматического управления подачей топлива в карбюратор и, соответственно, частотой вращения коленвала двигателя внутреннего сгорания. Привод 6 включает в себя блок управления БУ12-8-1-01, шаговый электродвигатель ДШ65-006-3 (ЗАО «Машиноаппарат», г. Москва) и специальный редуктор. Электродвигатель и редуктор установлены на румпеле лодочного мотора.
На участок 8 подготовки ЛМ поступают моторы, прошедшие предварительную регулировку и обкатку. Перед испытаниями моторы оснащаются дополнительными узлами и устройствами в соответствии с технологией автоматизированных испытаний. После испытаний моторы приводятся к штатной комплектации.
Стойка 11 гидромеханической подсистемы нижнего уровня 2 имеет силоизмерительную транцевую доску (на рис. 1 не показана), на которую устанавливается испытываемый лодочный мотор 12. Узел силоизмерительной транцевой доски включает в себя динамометрические устройства 14 и 15, обеспечивающие измерение крутящего момента MКВ на коленчатом вале ДВС и тягового усилия Rгребного винта лодочного мотора.
Информационно – измерительная подсистема испытательного комплекса АИК-1 обеспечивает получение информации о физических величинах лодочного мотора и окружающей среды, перечень которых представлен в табл. 1.
Таблица 1
Перечень измеряемых физических величин лодочного мотора и окружающей среды
№ п/п | № позиции на рис.1 | Наименование измеряемойфизической величины | Обозначение | Единица | Диапазон измерения | Погрешность*) |
1 | 2 | 3 | 4 | 5 | 6 | 7 |
1 | 13 | Частота вращения коленчатого вала ДВС | nКВ | об/мин | 100 … 9000 | ±0,5% |
2 | 14 и 15 | Крутящий момент на коленчатом вале ДВС | MКВ | Н×м | 1,5 … 20,0 | ±0,5% |
3 | 14 и 15 | Тяговое усилие гребного винта | R | Н | 50 … 500 | ±0,5% |
4 | 16 | Масса расходуемого топлива | mТ | г | 0 … 1000 | ±1% |
5 | 17 | Температура воды на сливе системы охлаждения ДВС | tСЛ | °C | +20 … +100 | ±1% |
6 | 18 | Температура атмосферного воздуха в испытательном помещении | tАТМ | °C | +10 … +50 | ±1% |
7 | 19 | Температура воды в испытательной емкости | tВОД | °C | +10 … +50 | ±1% |
8 | 20 | Давление атмосферного воздуха в испытательном помещении | pАТМ | кПа | 84 … 107 | ±5% |
9 | 21 | Относительная влажность атмосферного воздуха в испытательном помещении | RH | % | 30 … 100 | ±5% |
*) – основная приведенная погрешность первичных преобразователей.
В состав информационно – измерительной подсистемы входят две группы измерителей физических величин.
К первой группе измерителей относятся:
§ тахогенератор 13 модели ТГП-3 (ОАО «Московский завод электромеханизмов»), измеряющий частоту nКВвращения коленчатого вала ДВС ЛМ;
§ динамометры 14 и 15, обеспечивающие измерение крутящего момента MКВ на коленчатом вале и тягового усилия Rгребного винта (первичные преобразователи динамометров это тензопреобразователи модели С05);
§ измеритель массы mТ расходуемого топлива, основными компонентами которого являются динамометрические весы 16 с первичным тензопреобразователем С05 и дополнительный топливный бак 23.
Выходные сигналы измерителей первой группы поступают в измерительный блок 22, в состав которого входят вторичные преобразователи и четыре табло цифровой индикации текущих значений частоты nКВвращения коленвала, крутящего момента MКВ на коленвале, тягового усилия Rгребного винта и массы mТ топлива в баке 23. Измерительный блок 22 масштабирует входные аналоговые сигналы и подает их в контроллер ПЛК 4.
Ко второй группе измерителей относятся только первичные преобразователи, выходные сигналы которых поступают непосредственно в контроллер ПЛК 4:
§ термопреобразователь 17 (модель ТСП 012.02 с защитной гильзой, СКБ «Термоприбор», г. Москва) для измерения температуры tСЛводы на сливе системы охлаждения ДВС ЛМ 12;
§ термопреобразователь 18 (модель ТСП 012-03.02, без защитной гильзы) для измерения температуры tАТМ атмосферного воздуха в испытательном помещении 2;
§ термопреобразователь 19 (модель ТСП-012.02-03.02 с защитной гильзой) для измерения температуры tВОД воды в испытательной емкости 10;
§ первичный преобразователь 20 (модель 24PCCFA, фирма «Honeywell» Inc.) для измерения давления pАТМ атмосферного воздуха в испытательном помещении 2;
§ первичный преобразователь 21 (модель HIH-3602-L, фирма «Honeywell» Inc.) для измерения относительной влажности RH атмосферного воздуха в испытательном помещении 2.
Электромашинная подсистема испытательного комплекса АИК-1 предназначена для вращения коленчатого вала ДВС ЛМ при решении следующих задач:
§ автоматический запуск ДВС и определение скорости (частоты вращения) запуска – т. е. минимальной частоты вращения коленвала, необходимой для запуска ДВС;
§ автоматическое определение внешней скоростной характеристики ДВС.
Электромашинная подсистема выполнена в виде скоростного следящего привода (ССП) переменного тока, который включает в себя следующие компоненты:
§ 3-х фазный асинхронный электродвигатель (АД) 24 модели 4АМ52П132 М4П5УХЛ4 (мощность 11 кВт, максимальная частота вращения 4000 об/мин), дополнительно оснащенный датчиками угла и скорости; АД установлен на стойке 11, вал АД ориентирован вертикально;
§ механическая передача (редуктор, маховик, кардан), с помощью которой вал АД соединяют с коленвалом испытываемого ЛМ 12;
§ усилитель 25 мощности, состоящий из преобразователя частоты модели Р-15 (НПО «Сапфир» г. Москва) и блока управления, специально разработанного ЦНИИАГ для задач, решаемых ССП в составе АИК-1;
§ блок 26 балластных резисторов, предназначенный для утилизации в теплоту электроэнергии, генерируемой ССП при уменьшении им крутящего момента нагрузки на коленвале ДВС ЛМ в процессе определения внешней скоростной характеристики ДВС (предусмотрена также возможность рекуперации генерируемой электроэнергии в сеть, однако имеется опасение внесения помех недопустимого уровня, если электросеть имеет очень низкое качество);
§ пульт 27 местного управления, используемый при настройке некоторых характеристик ССП для различных моделей и модификаций лодочных моторов.
Блок-схема автоматизированного испытательного комплекса АИК-1 представлена на рис. 2, на котором сохранена нумерация позиций рис. 1. Схема раскрывает основные взаимосвязи отдельных модулей контроллера ПЛК 4 между собой и с другими компонентами испытательного комплекса.
На участке 8 лодочный мотор ЛМ 12 проходит предиспытательную подготовку – оснащается дополнительными узлами и устройствами в соответствии с технологией автоматизированных испытаний (мотор оснащается топливной арматурой для присоединения дополнительного топливного бака 23, на румпель ЛМ устанавливаются шаговый электродвигатель и редуктор привода 6 рукоятки газа и т. д.). Затем ЛМ устанавливается на транцевую доску гидромеханической подсистемы испытательного комплекса и к нему присоединяются элементы, необходимые для проведения данной категории испытаний (к коленвалу ДВС присоединяется кардан привода ССП, подсоединяется топливный бак 23 и т. д.). После включения подачи топлива все испытания выполняются в автоматизированном режиме (с участием оператора – испытателя нижнего уровня).
В ТУ на лодочные моторы предписано выполнение приемо-сдаточных и периодических испытаний.
Приемо-сдаточным испытаниям подвергается каждый выпускаемый лодочный мотор после технологического прогона и регулировки.
При приемо-сдаточных испытаниях контролируются и протоколируются следующие параметры лодочного мотора:
§ наименьшая устойчивая частота nКВ.НУ вращения коленвала ДВС;
§ максимальная частота nКВ.МАХ вращения коленвала ДВС;
§ зависимость tСЛ = f(nКВ) температуры воды на сливе системы охлаждения ДВС от частоты вращения коленвала.
Также измеряются и протоколируются следующие параметры окружающей среды:
§ температура tВОД воды в испытательной емкости;
§ температура tАТМ атмосферного воздуха в испытательном помещении;
§ давление pАТМатмосферного воздуха в испытательном помещении;
§ относительная влажность RH атмосферного воздуха в испытательном помещении.
Для проведения периодических испытаний отбираются моторы из числа прошедших приемо-сдаточные испытания. Периодичность и объем испытаний установлены в ТУ.
При периодических испытаниях контролируются (измеряются и, при необходимости, рассчитываются) и протоколируются следующие параметры лодочного мотора:
§ внешняя скоростная характеристика ДВС лодочного мотора, которая в соответствии с ГОСТ 14846-81 включает в себя функциональные зависимости от частоты вращения коленвала следующих величин:
MКВ = f(nКВ) – крутящего момента нагрузки на коленвале ДВС,
N= f(nКВ) – мощности ДВС,
GТ = f(nКВ) – массового часового расхода топлива,
g = f(nКВ) – удельного расхода топлива;
§ температура tСЛ воды на сливе системы охлаждения ДВС на некоторых стадиях испытаний;
§ параметры окружающей среды (аналогично приемо-сдаточным испытаниям);
§ максимальные значения MКВ.МАХ,NМАХ, RМАХ крутящего момента, мощности и тягового усилия;
§ эффективные значения частоты вращения коленвала ДВС (значения частоты вращения при максимальной мощности и максимальном тяговом усилии);
§ массовый часовой расход GТ топлива при максимальной мощности ДВС.
Помимо приемо-сдаточных и периодических испытаний автоматизированный комплекс АИК-1 позволяет выполнять различные специальные испытания. Для этого необходимо иметь (или дополнительно разработать) соответствующее прикладное программное обеспечение верхнего уровня испытательного комплекса.

Рис. 2. Блок-схема автоматизированного испытательного комплекса АИК-1
К специальным испытаниям относятся, в частности, следующие:
§ аттестация нестандартных средств, каналов и систем измерения, используемых в испытательном комплексе;
§ обучение операторов – испытателей верхнего и нижнего уровней испытательных комплексов с имитацией различных, в том числе нештатных и аварийных, испытательных ситуаций;
§ исследовательские испытания, например, сравнительные испытания различных моделей и модификаций лодочных моторов, сравнительные испытания различных типов гребных винтов и т. д.;
§ демонстрационные (рекламные) испытания.
Представленный автоматизированный испытательный комплекс АИК-1 является основой для создания иных моделей и модификаций комплексов стендовых испытаний с высоким уровнем автоматизации. В перспективе мы видим возможность создания следующих моделей испытательных комплексов.
1. Автоматизированный испытательный комплекс, нижний уровень которого имеет несколько (4 … 6) испытательных емкостей. Процессы управления испытаниями на каждой емкости независимы друг от друга. Такой испытательный комплекс, в настоящее время, обеспечит потребности испытательного участка цеха, производящего лодочные моторы.
Комплекс будет иметь следующие особенности по отношению к комплексу АИК-1:
§ гидромеханическая и электромашинная подсистемы, привод рукоятки газа ЛМ, измерители параметров лодочного мотора, панель UniOP оператора-испытателя нижнего уровня имеются у каждой испытательной емкости;
§ участок подготовки ЛМ, измерители параметров окружающей среды – общие для всего нижнего уровня испытательного комплекса;
§ состав верхнего уровня испытательного комплекса сохраняется (ПЛК и АРМ);
§ конфигурация контроллера иная (требуются дополнительные модули);
§ новое программное обеспечение верхнего уровня испытательного комплекса.
2. Автоматизированные комплексы для испытаний лодочных моторов мощностью более 5-и л. с. Такие комплексы отличаются от рассмотренных выше только мощностью электромашинной подсистемы, некоторыми конструктивными особенностями элементов нижнего уровня и программным обеспечением верхнего уровня испытательного комплекса.
Достоинства автоматизированных испытательных комплексов (по сравнению с неавтоматизированными) очевидны:
§ соответствие современному уровню автоматизации технологических процессов;
§ высокая точность и объективность результатов испытаний;
§ минимизация времени и сокращение стоимости проведения испытаний;
§ возможность проведения комплексных испытаний (одновременно по многим контролируемым параметрам) в течение малого периода времени;
§ высокая гибкость и переналаживаемость автоматизированного комплекса при изменении видов и объектов испытаний.
ЛИТЕРАТУРА
1. Универсальные программируемые промышленные контроллеры серии "ЭК-2000": Инструкция по эксплуатации. – М. Эмикон, 1994. – 30 с.
2. Интегрированная система разработки прикладного программного обеспечения CONT – Designer: Руководство пользователя / Сост. А. В. Алексеев. – М.: Эмикон, 1990. – 109 с.
3. Интегрированная система разработки прикладного программного обеспечения CONT – DesignerforWindows: Руководство программиста / Сост. А. В. Алексеев. – М.: Эмикон, 2006. – 70 c.
Публикации с ключевыми словами: испытания, лодочные моторы, компьютеризированный комплекс
Публикации со словами: испытания, лодочные моторы, компьютеризированный комплекс
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||