научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 11, ноябрь 2011
УДК 528.8(875.8)
МГТУ им. НЭ. Баумана
ВВИА им. профессора Н.Е. Жуковского и Ю.А. Гагарина
Введение
Основой публикации являются результаты проведенных исследований по разработке метода и средств выработки требований к навигационному оборудованию, информационному обеспечению и системе полета летательных аппаратов (ЛА) воздушной разведки, обеспечивающих в совокупности требуемое качество регистрируемых аэрофильмов. Рассмотрены вопросы реконструкции аэрофотоснимков с учетом факторов условий регистрации аэрофильма. Исследование проведено с учетом принципиальных (теоретических) ограничений возможностей комплексов воздушной разведки и информационных технологий, обеспечивающих решение задач регистрации данных воздушной разведки и обнаружения (распознавания).
Для удобства ознакомления материалы публикации изложены в двух статьях. В первой публикации на основе обзора и анализа комплексов, включающих пилотируемые и беспилотные ЛА – носители средств воздушной разведки рассматривается математическая модель полета ЛА в режиме аэрофотосъемки с учетом действия внешних флуктуаций.
В настоящей статье рассматриваются аэрофотоаппаратура (АФА), системы стабилизации положения АФА на различных носителях и системы привязки аэрофильмов к той или иной системе координат.
Задачи решаются на основе анализа:
· Аппаратуры воздушной разведки.
· Основных факторов навигации ЛА и свойств аэрофотоаппаратов, определяющих качество аэрофильмов при различных режимах воздушной разведки. Учитываются такие факторы, как смаз изображения, вызванный нескомпенсированным движением изображения в плоскости регистрации и дефокусировка, обусловленного вибрациями на борту ЛА.
· Особенностей обработки аэрофильмов.
Качество регистрации и обработки аэрофильмов оценивается по следующим критериям:
· Разрешение на местности.
· Точность привязки кадра аэрофильма к определенной системе координат.
Анализ аппаратуры аэрофоторазведки
1.1 Основные определения
В разделе при анализе методов и средств регистрации в системах воздушной разведки принято, что проектные решения, принятые в отечественной и зарубежной аппаратуре во многом совпадают. Далее принимается, что аэрофотоаппарат (АФА), это оптико-механический, либо оптико-электронный прибор с элементами автоматики и электроники, предназначенный для получения с самолёта или другого летательного аппарата (ЛА) аэрофотоснимков земной поверхности.
Специфические условия фотографирования (большое удаление объектов съёмки, быстрое перемещение и колебания во время съёмки) предъявляют особые требования к АФА [1], что предопределяет следующие его отличия от обычных фотоаппаратов:
· полная автоматизация работы АФА,
· наличие амортизирующей (часто гиростабилизированной) опорной рамы,
· значительный формат снимка,
· быстрота смены кадров.
1.2 Методы и средства аэрофотосъемки
В настоящей работе использована общепринятая терминология, раскрытая ниже. При этом аппарат, являющийся центральным элементом любой из вышеуказанных систем разведки, по сложившейся традиции именуется аэрофотоаппаратом.
Таким образом, далее принимается, что аэрофотосъёмка, это фотографирование местности специальным аэрофотоаппаратом (АФА), установленным на самолёте, вертолёте, как пилотируемых, так и беспилотных. По классу решаемых задач при анализе будем различать:
· АФА топографического назначения;
· АФА военного (нетопографического назначения), предназначенные для регистрации данных воздушной разведки с целью дальнейшей выработки разведдонесений.
К первым предъявляются жёсткие требования в отношении обеспечения высоких измерительных и изобразительных свойств снимков, включая свойство построения 3D-изображений местности.
Ко вторым, в основном, предъявляются требования, обусловленные вероятностями обнаружения и распознавания зачастую маскированных объектов. Эти требования рассматриваются ниже.
Независимо от назначения в соответствии со сложившейся практикой, плоскость регистрации аэрофотоаппарата может занимать заданное горизонтальное (плановая регистрация наиболее распространена) или наклонное (перспективная регистрация) положения. Особого внимания заслуживают АФА, в которых фотографирование производится на цилиндрическую поверхность или вращающимся объективом (панорамная регистрация). Обычно регистрацию выполняют однообъективным аэрофотоаппаратом, но в ЦАФА для увеличения площади, фотографируемой на одном снимке, — многообъективным аэрофотоаппаратом. Примеры таких ЦАФА рассмотрены ниже. В каждый момент фотографирования центр проектирования и плоскость аэроснимка занимают произвольное положение, в виду подвижности основания [1, 2]. Величины, определяющие пространственное положение снимка относительно принятой системы координат, называются элементами внешнего ориентирования снимка — три линейные координаты центра проектирования Xs, Ys, Zs и три угла, определяющие поворот снимка вокруг трёх осей координат. Для определения по аэроснимкам пространственных координат сфотографированных точек требуется сначала найти элементы внешнего ориентирования снимков, что связано с нахождением координат определённых геодезически некоторых точек, хорошо изобразившихся на снимках.
Как известно [2] для установления в полёте элементов внешнего ориентирования применяют статоскоп, фиксирующий по изменению давления воздуха изменение высоты полёта, измеритель скорости – манометрический, либо допплеровский, высотомер, определяющий высоту фотографирования относительно местности, радиогеодезические станции, дающие возможность находить:
· расстояния от самолёта до станций, расположенных на земной поверхности в точках, имеющих геодезические координаты - эти данные позволяют вычислить плановые координаты центра проектирования.
· Показания гировертикали, дающие возможность найти углы наклона снимка, их такжеможно определить обработкой снимков, на которых сфотографированы звёздное небо, положение Солнца или линия горизонта.
В последние десятилетия для определения геодезических координат активно применяются GPSи ГЛОНАС.
Перечисленная аппаратура обладает погрешностями, которые следует учесть при системном анализе.
При решении задач воздушной разведки традиционно к АФА предъявляются следующие требования:
· затвор должен обеспечить очень короткие (до 1:1000 сек) выдержки, чтобы уменьшить нерезкость, вызванную нестабилностью полета ЛА воздушной разведки, высокой воздушной скоростью, вибрациями и.т.п.
· аэроплёнка в момент фотографирования на аналоговый регистратор должна быть строго выровнена в плоскость.
Основными характеристиками АФА, принятыми во внимание при анализе являются фокусное расстояние, формат кадра, минимальное время выдержки. Последнее особенно существенно для устранения фактора смаза при фотографировании со скоростных ЛА. Как показано ниже, многообъективные АФА распространены при цифровой регистрации из-за особенностей конструкции цифровых регистраторов, имеющих ограниченные линейные размеры.
Как известно, зависимости от используемого в качестве носителя информации и участка спектра электромагнитных колебаний аэрометоды делятся на аэрофотосъемку, использующую видимую и ближнюю инфракрасную части спектра, и аэрогеофизическую съемку. В последнем случае фактор стабилизации оптической оси объектива весьма существенен. Фотографирование, осуществляемое аэрофотоаппаратом, установленным на самолете или каком-либо другом летательном аппарате, характеризуется следующими особенностями [1, 2, 3]:
· Воздушное фотографирование зачастую осуществляется с нежесткого основания, совершающего сложное движение под действием непрерывных аэродинамических возмущений и вибраций ЛА.
· Даже при стабилизации основания при условии стабилизации летательного аппарата системой ориентации остаточные возмущения случайным образом меняют положение линии визирования АФА.
· Между объектом фотографирования и фотографирующей системой всегда находится слой атмосферы, обладающий свойством светорассеяния с ярко выраженной спектральной избирательностью и переменной передаточной функцией.
· Освещенность объектов фотографирования и их контраст изменяются в значительном диапазоне, что предъявляет повышенные требования ко всей фотографирующей аппаратуре и к оптической системе в особенности.
· Скорость движенния изображения при использовании многих современных и особенно перспективных ЛА может достигать таких значений, что вызывает существенный сдвиг изображения (смаз), несмотря на все технические решения по его учету и требует принятия специальных мер для его компенсации.
· Изменяющиеся условия полета (температура, давление) влияют на параметры фотографирующей системы, что требует разработки способов компенсации этого влияния на качество изображения.
· Малые размеры изображения объектов фотографирования требуют повышенной разрешающей способности системы объектив — фоторегистратор и увеличения добротности фотографирующей системы.
· Важной особенностью фотографирования с помощью систем разведки является постоянство фокусировки и независимость ее от высоты фотографирования, поскольку оптическая система аэрофотоаппарата настроена на бесконечность.
Далее принимается, что современный аэрофотоаппарат состоит из аэрофотокамеры, аэрофотоустановки и командного прибора [1].
В аэрофотокамере происходит построение оптического изображения и восприятие его светочувствительным слоем фоторегистратора. |
В аэрофотокамере могут располагаться также:
· механизм оптической компенсации сдвига изображения;
· механизм механической компенсации сдвига изображения;
· автоматический спуск или фотореле;
· автомат регулировки экспозиции;
· узел автоматической фокусировки аэрофотокамеры;
· узел регистрационных приборов;
· механизм смены светофильтров.
Аэрофотоустановка является промежуточным звеном между аэрофотокамерой и летательным аппаратом, на котором она установлена. Аэрофотоустановка служит для обеспечения требуемого положения аэрофотокамеры в пространстве и уменьшает воздействия внешних и внутренних возмущений. Для регистрации снимков стереопар аэрофотоустановка выплняется качающейся.
У современных аэрофотоаппаратов продолжительность цикла работы аэрофотоаппарата может изменяться от нескольких тысячных долей секунды у специальных аэрофотоаппаратов и до нескольких секунд у топографических.
Для уменьшения продолжительности цикла работы отдельные элементы цикла совмещают по времени.
Рациональное построение циклограммы работы аэрофотоаппарата предусматривает такой порядок чередования элементов цикла, при котором экспонирование регистратора происходило бы при колебаниях аэрофотоаппарата, меньших пороговых значений этих колебаний.
Как отмечалось, основное требование, предъявляемое к аэрофотоаппаратам, независимо от типа регистратора – это обеспечение высокого качества изображения, которое может быть выполнено только при следующих условиях:
· Максимальная разрешающая способность по всему полю изображения и высокая добротность.
· Большая светосила оптической системы и правильная передача контраста изображения.
· Отсутствие влияния работы затвора на качество изображения. Затвор не должен вносить искажений в изображение и должен иметь высокий оптический коэффициент полезного действия, что характерно для центральных затворов.
· Высокоточное выравнивание аэрофотопленки в фокальной плоскости аэрофотокамеры, применяющей аналоговые фоторегистраторы.
· Высокое качество амортизации аэрофотокамеры при фотографировании с самолета (и особенно – с вертолета) и стабилизация оптической оси объектива.
· Постоянство элементов внутреннего ориентирования: фокусного расстояния камеры и главной точки снимка.
Важными требованиями являются возможность стабилизации оптической оси и введение поправки на угол сноса, а также сохранение заданного интервала между циклами съемки. Удовлетворение этих требований обеспечивает постоянство перекрытия между снимками. Это существенно и при решении задачи формирования стереопар для построения 3Dизображений [2].
Наиболее распространенные на сегодняшний день АФА с цифровой записью видеоинформации используют в качестве фотоприемников линейки ПЗС, заполняющие поле зрения оптической системы так, чтобы, во-первых, повысить разрешение, во-вторых, обеспечить обзор в передней и дальней полусфере и, в-третьих, для решения задач стереофотограмметрии.
Типичным представителем таких АФА является аппарат фирмы Leiсa. Названный АФА предназначен для решения задач топографической съемки, а также для нужд промышленности и сельского хозяйства.
Узкая область применения таких АФА обусловлена необходимостью соблюдения горизонтального, стабильного по тангажу и крену полету самолета-носителя.
1.3 Модели аэрофотоаппаратов
На Рисунке 1. представлена структура системы, использующей в качестве фоторегистратора фотопленку. Такие системы далее будут называться оптико-механическими.
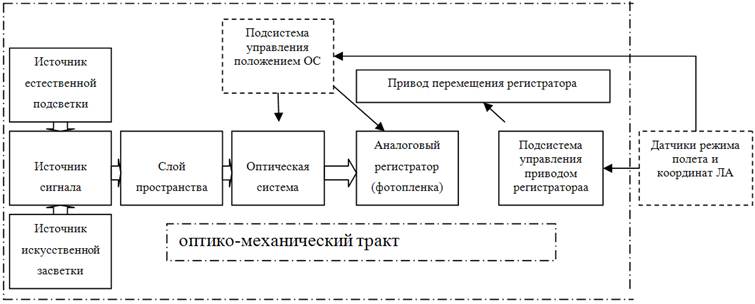
Рисунок 1. Функциональная схема обобщенной оптико-механической системы, моделирующая АФА.

Рисунок 2. Функциональная схема обобщенной оптико-электронной системы, моделирующая ЦАФА, либо видеокамеры.
Модель ЦАФА, как ОЭС (Рисунок 2) рассматривается в двух модификациях, состоящих из двух основных компонент:
· Неизменная подсистема, обеспечивающая предварительную обработку сигнала.
· Подсистема, состав и назначение которой определяет функциональное назначение ОЭС в целом.
· Анализ показывает, что независимо от назначения ОЭС, в ней обязательно присутствует оптико-электронный тракт (ОЭТ), обеспечивающий предварительную обработку сигнала.
На рисунке 2 выделен оптико-электронный тракт, состав которого не зависит от назначения ОЭС и подсистема, обозначенная выделенным пунктиром тремя видами оконченных каскадов. Оптико-электронный тракт является, по существу основой частью ОЭС, которую в определенных пределах можно обратимым образом модифицировать для решения задач, поставленных в ТЗ.
В первой модификации реализуется модельное представление структуры ОЭС регистрирующего типа (это подсистемы фотоаппарата или видеокамеры, обеспечивающие запись изображения на какой-либо носитель информации).
Во второй модификации рассматривается модель структуры информационной ОЭС, оконечным каскадом которой является зрительный анализатор человека-оператора (это, например, ТВ-система, тепловизор, и.т.п.)
Под регистратором подразумевается устройство, выполняющее функции отображения результатов измерений в виде изображений (это, например, дисплей)
Под декодером понимается устройство, восстанавливающее изображение по закону сканирования, который передается от анализатора (кодера) по шине «синхросигнал».
Отмеченный штрих-пунктиром блок «оптико–электронный тракт» в рассматриваемой структуре является неизменной компонентой любой оптико-электронной системы. В формировании аппаратной функции его свойства играют определяющую роль. Поэтому модель ОЭТ далее будет рассматриваться, как основная часть модели ОЭС.
Как показал анализ, в модели ОЭТ необходимо учесть аппаратную функцию (импульсный отклик) объектива и слоя пространства. В свою очередь, при расчете параметров модель аппаратной функции должна учитывать и дифракционные явления и аберрации оптической системы, а также факторы, существенным образом влияющие на вид аппаратной функции АФА и ЦАФА – дефокусировка и смаз.
В соответствии с изложенным, в основу выбора и уточнения модели ОЭТ в настоящей работе заложены следующие требования:
· модель должна учитывать основные факторы, определяющие аппаратную функцию оптико-электронного тракта с известной степенью адекватности;
· Модель должна отвечать требованию полноты. Анализ методов модельного представления ОЭС [9], позволил сделать вывод о возможности использования частотно-пространственных и частотно – временных представлений, принятых в теории оптико-электронных систем.
1.4 Краткий анализ компонент схемы ОЭТ, определяющих аппаратную функцию ЦАФА
1.4.1 Иcтoчник cигнaлa
Источник сигнала рассматривается здесь, либо как первичный, либо как вторичный. В первом случае это источник собственного излучения, которое является физическим носителем, как полезного сигнала, так и помехи в виде фонового излучения. Во втором случае это источник рассеянного (отраженного) излучения, которое возникает при естественной или искусственной подсветке. В этом случае также возможно присутствие фонового излучения. В любом из рассмотренных случаев модельное представление источника сигнала для подавляющего большинства ОЭС, как объектов проектирования, представимо в виде:
Lλ(x,y)= Lλ LN(x,y),
где:
Lλ(x,y) – яркостное поле пространства предметов;
Lλ – спектральная яркость пространства предметов;
λ – длина волны излучения;
LN(x,y) – нормированное распределение яркости в пространстве предметов.
1.4.2 Слой пространства
Определяется, как пространственный фильтр c распределенными конструктивными пapaмeтpaми.
B некогерентном приближении cлoй пpocтpaнcтвa xapaктepизyeтcя вeщecтвeнным кoэффициeнтoм пpoпycкaния. Основные конструктивные пapaмeтpы cлoя пpocтpaнcтвa - длинa и нaклoн тpaccы, диaмeтp зpaчкa вxoдa пocлeдyющeй кoмпoнeнты. B cлyчae,ecли cлoй пpocтpaнcтвa чacтичнo или пoлнocтью зaпoлнeн зeмнoй aтмocфepoй, кoнcтpyктивными пapaмeтpaми являютcя выcoтa нaд ypoвнeм мopя, пapaмeтpы мeждyнapoднoй cтaндapтнoй aтмocфepы, плoтнocть инopoдныx включeний и xapaктep этиx включeний.
Таким образом, математическая модель некогерентного импульсного отклика слоя пространства сводится к учету нормированного импульсного отклика, спектрального пропускания и имеет вид:
![]()
где:
Hсп(ξ,η) – импульсный отклик слоя пространства;
τx – коэффициент спектрального пропускания;
ξ,η – координаты зрачка входа оптической системы.
Турбулентость атмосферы учитывается в модели импульсного отклика.
1.4.3 Oптичecкaя cиcтeмa (ОС)
В настоящей работе в качестве основы математической модели ОС принимается хорошо изученная оптическая передаточная функция (ОПФ). При этом аппаратная функция (импульсный отклик ОС) легко может быть определена как обратное преобразование Фурье от ОПФ:

где Ĥn (·,·) – оптическая передаточная функция (ОПФ);
υx,υy – пространственные частоты ;
x', y' – координаты в плоскости изображения;
j=√-1;
λ - длина волны.
С учетом аберраций и дифракционных свойств ОС принимается следующее выражение для ОПФ:
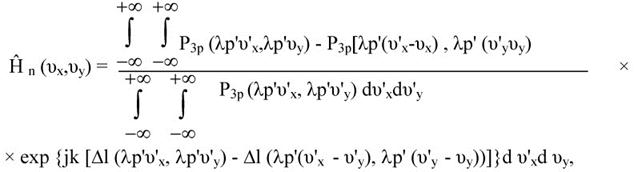
где Р3р (·,·) – функция зрачка ОС;
λ - длина волны;
k – волновое число;
Δl (·,·) – волновая аберрация.
Далее принимается, что:
N (υx,υy)= | Ĥn (υx,υy) | - частотно – контрастная характеристика ОС (ЧКХ ОС);
Фос (υx,υy) = arg (Ĥn (υx,υy) – частотно - фазовая характеристика ОС (ЧФХ ОС).
Таким образом, оптическая система при системном анализе рассматривается как фильтр пространственных частот с математической моделью импульсного отклика:
![]()
где:
HNoc(x’,y’) – приведенный импульсный отклик;
x’,y’ – координаты в плоскости изображения оптической системы.
1.4.4 Aнaлизaтop изoбpaжeния (Koдep)
Рассматривается, как устройство для кoдиpoвaния пoдмнoжecтвa пpизнaкoв из мнoжecтвa пpизнaкoв в пpocтpaнcтвe пpeдмeтoв в видe oднoй или нecкoлькиx вpeмeнныx кoдoвыx пocлeдoвaтeльнocтeй, пepeдaвaeмыx пapaллeльнo, пapaллeльнo - пocлeдoвaтeльнo, пocлeдoвaтeльнo.
Можно считать, что основным свойством анaлизaтopа изoбpaжeния является свойство мeнять paзмepнocть cигнaлa, путем пpeoбpaзования пpocтpaнcтвeнного cигнaла вo вpeмeннoй.
При выборе математической модели кодера принято во внимание, что ЦАФА используют в качестве элементной базы фотоприемные устройства с электронным сканированием (матричные, линейные ПЗС и т.п.). Для названных устройств характерен линейный закон сканирования в различных модификациях, который адекватно описывается в декартовой системе координат.
В самом общем случае при решении задач анализа и синтеза математическая модель кодера принимается виде:

где Ф (·,·,·,) – поток на выходе кодера;
Е (·,·) – освещенность в плоскости изображения;
На (·,·) – импульсный отклик (аппаратная функция) кодера;

хр, ур – учитывает линейное сканирование. При рассмотрении ОЭС с системами развертки, принятыми во внимание в работе, частотно – временной спектр потока излучения на выходе кодера рассматривается в виде:

где τλ - спектральный коэффициент пропускания слоя пространства;
β - линейное увеличение ОС;
α' – задний апертурный угол ОС;
L0λ - максимальное значение спектральной яркости предмета;
Vх – скорость сканирования вдоль оси Х.
Для решения задачи восстановления изображения с учетом возможного "смаза" учет девиации Vх особенно необходим. Однако методически целесообразно для модельного преставления кодера с точки зрения математической формулировки задачи перейти от временной частоты υt к пространственной, причем
υх = υt/ Vx
Тогда пространственная передаточная функция (а вместе с ней и функция аппаратная) определяется функцией пропускания растра.
1.4.5 Приемник излучения (ПИ)
Ocнoвныe кoнcтpyктивныe пapaмeтpы ПИ в работе отнесены к xapaктepиcтикaм чyвcтвитeльнoгo cлoя:
· cпeктpaльнaя вoльтoвaя чyвcтвитeльнocть;
· oбнapyжитeльнaя cпocoбнocть;
· cпeктpaльнaя плoтнocть шyмoв;
· пocтoяннaя вpeмeни;
Таким образом, в работе paзличaются пoнятия "пpиeмник излyчeния" и "фoтoпpиeмнoe ycтpoйcтвo" (ф.п.y). Пocлeднee пoнимaeтcя, кaк пocлeдoвaтeльнocть, coдepжaщaя детeктop излyчeния, пpocтpaнcтвeнный, вpeмeннoй и cпeктpaльный фильтpы. Пpиeмник излyчeния пoнимaeтcя здecь, в cooтвeтcтвии c oпpeдeлeниeм, кaк дeтeктop излyчeния. Peaльнoe ф.п.y oбpaзyeтcя кaк coвoкyпнocть звeньeв:
· aнaлизaтop изoбpaжeния (пpocтpaнcтвeнный фильтp);
· пpиeмник излyчeния (энepгeтичecкий фильтp);
· вpeмeннoй фильтp;
· бeзынepциoннaя нeлинeйнocть.
В настоящей работе ПИ рассматривается в линейном приближении. Это допущение сделано в предположении, что подавляющее число ОЭС всегда закладываются условия, исключающие функционирование на нелинейном участке интегральной вольтовой чувствительности ПИ. Модельное представление ПИ с учетом многообразия его фильтрующих свойств в спектральной, пространственной и временной области обосновывается в, исходя из следующего:
Пространственные фильтрующие свойства ПИ можно учесть в модели кодера, а временные – в модели электронного тракта.
В качестве передаточной функции ПИ принято рассматривать [9]:
Ĥn (хn, yn, υt) = Sq (хn, yn)· Sλ·Sλmax Ĥ (υt)
Sq (хn, yn) - функция, учитывающая пространственные фильтрующие свойства ПИ;
Ĥ (υt) - функция, учитывающая временные фильтрующие свойства ПИ;
Sλ - спектральная вольтова чувствительность приемника излучения.
Тенденции в развитии микроэлектроники таковы, что чувствительные площадки ПИ обладают достаточно малыми размерами, чтобы считать, что Sq (хn, yn)·= const. Кроме того, зависимость чувствительности ПИ от фонового потока при правильном проектировании ОЭС минимизируется.
Таким образом, модель ПИ в настоящей работе рассматривается, как совокупность спектрального и временного фильтров [9].
При этом временные инерционные свойства ПИ приписываются последующему аналоговому электронному тракту ОЭС.
Спектральные свойства ОЭС в целом учитываются моделью, в которой спектральные пропускания слоя пространства, оптической системы, энергетических фильтров учитываются, как произведение соответствующих коэффициентов спектрального пропускания τ.
В соответствии с изложенным, модель приемника излучения рассматривается, как модель преобразователя физического носителя сигнала – потока лучистой энергии в электрический сигнал U(t) по закону:

где:
sλ – спектральная вольтова чувствительность приемника излучения;
Lλ – энергетическая спектральная плотность яркости,
k=π sin2α – коэффициент, устанавливающий физическую размерность сигнала,
α – передний апертурный угол оптической системы.
Благодаря введению такой модели общая передаточная функция ОЭТ описывается как нормированная безразмерная функция.
1.4.6 Декодер (восстанавливающее звено)
В работе принято, что основная задача, решаемая декодером, описывается зависимостью:
L'(x,y) = {G}u(t)
Где: L' (·,·) – яркость восстановленного изображения;
u (t) – сигнал на выходе ОЭТ;
{G} ‑ линейный оператор.
При плоском законе сканирования, реализуемом в кодере, линейный оператор Gможно записать в явном виде.

Где: x(t) , y(t) - закон развертки, соответствующий закону сканирования в кодере;
h (·,·) - аппаратная функция.
1.4.7 Электронный тракт
С учетом выбранного в настоящей работе уровня детализации, аналоговый электронный тракт ОЭС рассматривается в линейном приближении. При этом считается допустимым пренебречь шумами квантования АЦП и ЦАП. В этом случае в качестве математической модели электронного тракта рассматривается выражение:

где Uвых (·) – выходной сигнал;
Uвх (·) – входной сигнал;
Hэ (·) – аппаратная функция (импульсный отклик).
Как известно, частотные характеристики электронного тракта определяются на основе его передаточной функции, которая в свою очередь определяется, как преобразование Фурье от импульсного отклика. Поэтому далее аналоговая часть электронного тракта рассматривается на основе аппаратной функции, либо передаточной функции.
В самом общем виде электронный тракт в обобщенной модели необходимо рассматривать при системном анализе в двух аспектах:
· Аналоговая обработка сигнала
· Аналого-цифровая обработка сигнала
В в любом случае электронный тракт применительно к ЦАФА имеет модельное представление в виде импульсного отклика Hэ(t) [10] и характеризуется основным конструктивным параметром – полосой пропускания.
Большинство формирующих изображение подсистем в первом приближении можно рассматривать как линейные и инвариантные к сдвигу [9, 10]. Изображения, сформированные такими системами, претерпевают линейные пространственно-инвариантные искажения, характеризующиеся тем, что механизм их возникновения один и тот же для всех точек (x, y). Линейные искажения проявляются в ослаблении верхних частот исходного изображения. Визуально это приводит к ухудшению его резкости. В процессе записи изображения искажаются также шумами, присутствующими в любом реальном физическом устройстве. В ряде практически важных случаев шум можно считать аддитивным и независящим от исходного изображения [9].
С учетом рассмотренных выше моделей отдельных звеньев для оптико-электронного тракта можно записать:
![]()
где:
τλ – коэффициент спектрального пропускания слоя пространства и оптической системы;
β – линейное увеличение оптической системы;
![]() – оптическая передаточная функция;
– оптическая передаточная функция;
![]() – пространственная передаточная функция анализатора изображения;
– пространственная передаточная функция анализатора изображения;
λ – длина волны излучения.
![]() – пространственная спектральная плотность потока излучения. Индекс «λ» введен в выражение для того, чтобы подчеркнуть, что оно получено с учетом энергетического спектра излучения в пространстве предметов.
– пространственная спектральная плотность потока излучения. Индекс «λ» введен в выражение для того, чтобы подчеркнуть, что оно получено с учетом энергетического спектра излучения в пространстве предметов.
Переход к пространственным координатам xp(t); yp(t) можно осуществить, применяя обратное преобразование Фурье:
 .
.
Следует отметить, что функция Фx(xp,yp) описывает сигнал на выходе анализатора изображения при любом плоско-параллельном движении анализирующего элемента. Это учитывает тенденции в развитии АИ и современной элементной базы. ЦАФА различного назначения снабжаются анализатором изображения, реализуемыми электронными сканерами, управление которыми возможно лишь в декартовой системе координат.
Модель ОЭС в линейном приближении можно представить в виде оператора, описывающего модель типа «черный ящик»:
R(p)[f(x,y)]=g(x,y),
где R(p)[.] – оператор, соответствующий оптической системе,
p – вектор конструктивных параметров оптико-электронной системы,
f(x,y) – функция, описывающая распределение контраста входного изображения,
g(x,y) – функция, описывающая распределение контраста выходного изображения,
(x,y) – пространственные координаты.
Допущение о линейности модели ОЭТ можно считать корректным, поскольку нелинейность реальных ОЭС определяется несовершенствами и физическими ограничениями элементной базы.
Как отмечалось в работах [10], восстановление смазанного и дефокусированного изображений можно формализовать путем постановки обратной задачи.
В большинстве известных случаев решение обратной задачи сводится к следующему:
· Известен выходной сигнал, описанный функцией, задающей контраст изображения на выходе линейной преобразующей системы;
· Известна аппаратная функция линейной преобразующей системы .
Необходимо определить функцию, задающую контраст входного изображения. Эта задача сводится к определению интеграла типа свертки, что показано ниже с учетом смаза и дефокусировки.
Обратные задачи, такие как решение интегрального уравнения, относятся к некорректным задачам, и ниже об этом будет сказано подробней. Для решения некорректных задач будет применен метод регуляризации Тихонова [5], с помощью которого будет достигнута требуемая устойчивость.
В современных системах обработки изображений есть возможность выполнения свертки изображения с ядром (эта операция также называется конволюцией). Реже встречается возможность решения обратной задачи (деконволюции).
1.5 Обращение оператора
Рассмотрим упрощенную модель оптико-электронной системы из состава ЦАФА, описываемую интегральным уравнением Фредгольма первого рода:

где:
sx, sy – пространственные координаты,
k(p,x,sx,y,sy) – ядро интегрального уравнения, описывающее оптико-электронную систему. Оно же является импульсным откликом системы и преобразование Фурье от него, как известно, является искомой передаточной функцией при решении задачи деконволюции.
Интегральным уравнением Фредгольма первого рода описываются такие искажения, как дифракционное рассеяние, аберрации оптической системы, фильтрация в электронном тракте и линейный смаз. Первые три фактора, указанные выше, можно рассматривать, как эквивалентную дефокусировку. Учет линейного смаза необходимо рассматривать отдельно, поскольку он не является фактором, обусловленным внутренними свойствами ОЭС.
1.5.1 Постановка и решение задачи восстановления смаза
Обратимся к известной постановке задачи для случая регистрации черно-белого изображения. При этом будем рассматривать случай, когда оптическая система фоторегистратора может быть представлена в геометрическом приближении, а факторы, обусловленные дифракцией и аберрациями, как отмечено выше, можно приписать эквивалентной дефокусировке. Пусть регистрируемый объект (полагаемый плоским вследствие его удаленности и наличия плоского регистратора) и регистратор расположены параллельно апертуре объектива по разные стороны от объектива на расстояниях соответственно f1 и f2 от нее, причем
где f – фокусное расстояние линзы и f1>=f. На рисунке 9 под термином «фоторегистратор» понимается любой регистратор, в частности, электронный.
В плоскости регистрации фиксируется перевернутое изображение.

Рисунок 3. Эквивалентная схема получения смазанного изображения
Введем в плоскости объекта прямоугольную систему координат ![]() , а в плоскости регистрации -
, а в плоскости регистрации - ![]() . Возьмем на объекте некоторую точку
. Возьмем на объекте некоторую точку ![]() с интенсивностью излучения
с интенсивностью излучения ![]() . Лучи, исходящие из нее и прошедшие через оптическую систему, пересекутся в некоторой точке
. Лучи, исходящие из нее и прошедшие через оптическую систему, пересекутся в некоторой точке ![]() в плоскости регистрации. Из подобия прямоугольных треугольников
в плоскости регистрации. Из подобия прямоугольных треугольников ![]() и
и ![]() следует:
следует:

или в проекциях:

В результате точка ![]() на плоскости регистрации (соответствующая точке
на плоскости регистрации (соответствующая точке ![]() на объекте) будет иметь интенсивность
на объекте) будет иметь интенсивность ![]() и координаты
и координаты ![]() (прямая задача):
(прямая задача):
![]()
где ![]() , причем
, причем ![]() определяется как
определяется как
Таким образом, каждой точке![]() на объекте будет соответствовать точка
на объекте будет соответствовать точка ![]() на плоскости регистрации с той же интенсивностью
на плоскости регистрации с той же интенсивностью ![]() , но с уменьшенными в
, но с уменьшенными в ![]() раз (и перевернутыми) координатами (см. Рис. 4).
раз (и перевернутыми) координатами (см. Рис. 4).
По фотоснимку можно восстановить объект (обратная задача):
![]()
При этом

Далее полагаем, что за время экспозиции ![]() фоторегистратор (либо ЛА) совершил прямолинейный и равномерный сдвиг (смещение) со скоростью
фоторегистратор (либо ЛА) совершил прямолинейный и равномерный сдвиг (смещение) со скоростью ![]() вдоль оси
вдоль оси ![]() , т.е. на величину
, т.е. на величину ![]() или сдвиг совершил объект (например, быстролетящая цель) на величину
или сдвиг совершил объект (например, быстролетящая цель) на величину ![]() . В результате изображение будет смазанным (сдвинутым, смещенным) вдоль
. В результате изображение будет смазанным (сдвинутым, смещенным) вдоль ![]() . Приведенные выкладки позволяют построить основное интегральное уравнение.
. Приведенные выкладки позволяют построить основное интегральное уравнение.
Введем наряду с неподвижной системой координат ![]() систему координат
систему координат ![]() , связанную с регистратором в виде движущейся фотопленки и совпадающую с
, связанную с регистратором в виде движущейся фотопленки и совпадающую с ![]() лишь в начальный момент (
лишь в начальный момент (![]() ) процесса смазывания (см. Рис. 4). На некоторую точку
) процесса смазывания (см. Рис. 4). На некоторую точку ![]() плоскости регистрации изображения за время
плоскости регистрации изображения за время ![]() проецируется непрерывный набор точек
проецируется непрерывный набор точек ![]() с абсциссами от
с абсциссами от ![]() до
до ![]() и с различными интенсивностями
и с различными интенсивностями ![]() , т.е. результирующая интенсивность (обозначим ее через
, т.е. результирующая интенсивность (обозначим ее через ![]() ) в некоторой точке
) в некоторой точке ![]() будет равна сумме (точнее, интегралу) интенсивностей
будет равна сумме (точнее, интегралу) интенсивностей ![]()

Запишем предыдущее выражение иначе:

Полученное соотношение является основным в задаче реконструкции смазанных изображений. В нем ![]() – распределение интенсивности на плоскости регистрации (на смазанном изображении) в функции прямоугольных координат
– распределение интенсивности на плоскости регистрации (на смазанном изображении) в функции прямоугольных координат ![]() , причем ось
, причем ось ![]() направлена вдоль сдвига (смаза),
направлена вдоль сдвига (смаза), ![]() – величина смаза, полагаемая известной, а
– величина смаза, полагаемая известной, а ![]() – распределение истинной неискаженной интенсивности на плоскости регистрации (той интенсивности, которая была бы в плоскости изображения в отсутствие смаза, т.е. при
– распределение истинной неискаженной интенсивности на плоскости регистрации (той интенсивности, которая была бы в плоскости изображения в отсутствие смаза, т.е. при ![]() ).
).
Это соотношение есть одномерное интегральное уравнение Вольтерра I рода относительно ![]() при каждом фиксированном значении
при каждом фиксированном значении ![]() , играющем роль параметра, другими словами, есть совокупность одномерных интегральных уравнений. Это уравнение можно записать в виде интегрального уравнения Фредгольма I рода типа свертки:
, играющем роль параметра, другими словами, есть совокупность одномерных интегральных уравнений. Это уравнение можно записать в виде интегрального уравнения Фредгольма I рода типа свертки:

где

Итак, получено интегральное уравнение типа свертки для реконструкции смазанного изображения. Отметим, что явление смаза присуще только оптическому тракту ОЭС, поэтому дальнейшие выкладки проводятся относительно оптической системы.
Основываясь на свойствах свертки, данное уравнение в частотной области можно записать как
K(u,v) G(u,v) = F(u,v)
где (u,v) – координаты в частотной области, K, G, F – Фурье-образы соответствующих функций. K(u,v) является оптической передаточной функцией.
Для решения задачи можно применить регуляризацию [9, 10], когда в качестве функции W принимается:
где M(u,v) – четная неотрицательная функция, например M(u,v)=1, α – параметр регуляризации, «*» обозначает комплексно сопряженную величину. Параметр регуляризации выбирается таким образом, чтобы добиться стабильности решения, но не внести слишком много искажений в решение. Оптимальное значение параметра регуляризации дает хорошее восстановление.
Таким образом, важнейшим фактором, который необходимо учитывать при обработке аэрофильмов является линейный смаз, определить величину и направление которого можно во многих практических случаях с помощью спектрального или градиентного методов, но с обязательной экспертной оценкой со стороны проектанта, что снижает точность восстановления. Поэтому для повышения точности необходимо знать вектор сназа. Поледнее возможно при учете динамики полета ЛА.
Спектральный метод основан на свойствах спектра смазанного изображения: в спектре присутствует характерная рябь, направленная по смазу, и имеющая период, обратно пропорциональный модулю вектора (длине) смаза, (см. рисунок 4.) Приведенные на рисунке 4 экспериментальные результаты получены с помощью прототипа программы, реализующий предлагаемый метод.

Рисунок 4. Спектр смазанного изображения
Для удобного нахождения экспертом направления и длины смаза зачастую используется кепстр – вещественную часть преобразования Фурье от логарифма магнитуды спектра, приведенный на Рисунке 5. На кепстре проявляются два симметричных относительно центра негативных пика, отстоящих от центра на величину, равную длине смаза. Линия, соединяющая эти пики, дает представление о направлении смаза.
|
|


Рисунок 5. Кепстр смазанного изображения
В качестве альтернативы, дополняющей спектральный метод, был рассмотрен градиентный метод определения направления смаза.
Градиентный метод основан на том, что в направлении смаза градиент ослаблен, в то время как в направлении, перпендикулярном смазу, величина градиента остается прежней. Таким образом, для определения вектора смаза необходимо найти градиент для каждой точки изображения. В обработке изображений для этого широко используются граничные градиентные фильтры. Определив градиенты для каждой точки, можно найти преимущественное направление градиента, тогда направление, перпендикулярное преимущественному, можно считать направлением смаза. Если же использовать не градиенты, а границы объектов смазанного изображения, то они будут вытянуты вдоль линии смаза. Найдя преимущественное направление линий границ объектов можно определить направление смаза. Однако при использовании навигационных данных ЛА возможно с той или иной точностьью определить вектор смаза, что исключает субъективный фактор при оценке вектора смаза. Таким образом, в математической модели динамики полета ЛА необходимо предусмотреть возможность оценки точности измерения бокового сноса и остаточные (нескомпенсированные) значения вектора смаза. Методы расчета остаточных значений вектора смаза рассмотрены в первой работе цикла статей [12].
Для решения обратной задачи при учете дефокусировки, возникающей при воздействии вибрационных факторов необходимо построить адекватную модель импульсного отклика (пятна, кружка рассеяния) объектива АФА.
Для выбора модели импульсного отклика в работе проведено исследование наиболее распространенных представлений соответствующих функций, зависящих от одного параметра, что позволяет предложить в качестве модели гауссоиду. (Рисунок 6.)
Функция часто применяется при модельном представлении ОС с учетом осесимметричных аберраций и дифракции.

Рисунок 6
Анализ тактико-технических характеристик АФА с регистрацией на аналоговый носитель.
Таблица 1. Основные характеристики АФА топографического назначения.
Параметр
| Название | |||||
АФА-ТЭ | АФА-41 | АФА-ТЭС | MRB | LMK | MSK-4 | |
Формат кадра, см | 18´18 | 18´18 | 18´18 | 18´18 23´23 | 23´23 | 5,5´8,1 |
Эффективная минимальная выдержка, с | 1/400 | 1/700 | 1/850 | 1/1000 | 1/500 | 5-2 |
Разрешающая способность (центр-край), мм-1 | 30-18 | 47-10 | 35-15 | 40 95-20 | 250-65 | 120 |
Компенсация сдвига изображения | Нет | Нет | Нет | Нет | До 32 м/с | 10-40 мрад/с |
Таблица 2. Основные характеристики АФА нетопографического назначения.
Параметр | АФА | |||||
ТЭ-100 | 41-100 | ТЭС-7 | ТЭС-10 | ТЭ-70 | ТЭС-5 | |
Фокальное расстояние, мм | 100 | 100 | 72 | 100 | 70 | 50 |
Угловое поле, град. | 104 | 104 | 120 | 103 | 122 | 136,5 |
Знаменатель относительного отверстия | 6,8 | 6,8 | 6,8 | 6,8 | 9 | 9 |
Формат кадра, см | 18´18 | 18´18 | 18´18 | 18´18 | 18´18 | 18´18 |
Разрешающая способность не менее, мм-1 Центр-край | 30-15 | 47-10 | 26 | 26 | 15 | 16 |
Затвор | Центр. | Центр. | Ротор. | Ротор. | Ротор. | Ротор. |
Мин. выдержка, с | 1/300 | 1/700 | 1/800 | 1/800 | 1/400 | 1/850 |
Таблица 2. Продолжение
Параметр
| Название АФА: | |||||||||||||
ТЭ-36 | МИГАиК | 39 | 42/20 | 42/50 | 42/75 | 42/100 | АФА-40 | АЩАФА-5 | ||||||
Фокусное расстояние, мм | 36 | 20 | 100 | 200 | 500 | 750 | 1000 | 1800 | 70, 200 | |||||
Знаменатель относительного отверстия | 7,7 | 7,0 | 2,5 | 6,3-16 | 5 | 6,3-16 | 7-22 | 8-22 | 6,3 | |||||
Формат кадра, см´см | 18´18 | 5,2´7 | 7´8 | 30´30 | 30´30 | 30´30 | 30´30 | 50´50 | 18´ 3000 | |||||
Тип затвора | Центр. | Центр. | Шторно-щелевой | Жалюзи | Жалюзи | Жалюзи | Жалюзи | Жалюзи | Нет | |||||
Минималь-ная выдержка, с | 1/400 | - | 1/1800 | 1/500 | 1/800 | 1/800 | 1/800 | 1/800 | - | |||||
Длительность цикла, с | 2,3 | 0,7 | 0,7 | 2,0 | 2,5 | 1,5 | 1,5 | 3 | - | |||||
Способ компенсации сдвига изображения | Нет | Нет | Нет | Нет | Оптич | Оптич | Оптич | Оптич | Механический | |||||
Таблица 3. Продолжение
Параметр | АФА | |||
АФА-БА-40 | АФА-39М | АФА-40 | АФА-42/100 | |
Объектив | ТЕ-17 | Уран-27 | Телемар-12 | Телемар-7М |
Фокусное расстояние, мм | 400 | 100 | 1000 | 100 |
Формат кадра, см | 13 ´18 | 7´8 | 50´50 | 30´30 |
Угловое пол, град. По большой стороне кадра По диагонали кадра |
25
31 |
44
54 |
16
22 |
24 |
Знам. относительного отверстия | 6,3-45 | 2,5 | 8-22 | 7-22 |
Разрешающая способность, мм-1 Центр Край |
30 17 |
44 10 |
- |
- |
Затвор | Шторный | Шторный | Жалюзи | Жалюзи |
Диапазон выдержек, с | 1/50-1/1000 | 1/100-1/1800 | 1/150-1/1600 | 1/100-1/1800 |
Цикл, с | 1,2 | 0,7 | 120 | 60 |
АФУ | Пружинная | Пружинная | Пружинная | Пружинная |
Как видно из анализа ТТХ данных АФА, значительный диапазон выдержек, минимальная величина которых достигает 1 мс, принципиально позволяет уменьшить значение модуля вектора смаза. Однако степень компенсации смаза в рассмотренных АФА зависит от точности датчиков параметров полета W– воздушной скорости и Н – высоты ЛА.
Рассмотренные ниже панорамные АФА во многом аналогичны по ТТХ американским и британским АФА, стоящим на вооружении. Так, например, панорамная аэрофотокамера KB18А производства США применяется для фотографирования с фронтовых истребителей, бомбардировщиков и самолетов прикрытия. Панорамирование осуществляется двойной призмой Дове, вращающейся на 180 градусов. Основные характеристики:
· Размер кадра: 5,7Х23,8 см.
· Используемая пленка: 70 мм длиной 70 м
· Объектив CarlZeiss: f=750 мм
· Относительное отверстие: f/2.8
· Диапазон выдержек: 1/100 до 1/4000 c.
Таблица 4. Основные характеристики отечественных панорамных АФА.
Параметр | Название | |
Зенит А 402М | Зенит А-84 | |
Элемент, обеспечивающий панорамирование | Вращающаяся призма | Вращающаяся призма |
Фокусное расстояние объектива, мм | 90,5 | 300,5 |
Относительное отверстие | 1:3,5 | 1:4,5 |
Размер кадра, мм | 68´286 | 118´748 |
Соотношение скорости полета к высоте | 0,15 | 0,21 |
Перекрытие по центру кадра, % | 20 | 25 |
Линейное разрешение на местности при коэф. контраста 0,2 и Н=400 м для «Зенита А 402М» и при К=0,4 Н=10 км для «Зенита А-84» (м) | Центр 0,3 Край 0,5 | Центр 0,4 Край 0,8 |
1.6 Примеры АФА с аналоговой регистрацией изображений, разработанных в последние годы
1.6.1 Аэрофотокамера для перспективного и планового фотографирования АФА-54
Аэрофотоаппарат АФА-54 предназначен для проведения планового и перспективного фотографирования земной поверхности с различных высот в целях обнаружения и распознавания объектов съемки в интересах народного хозяйства и обороны.
АФА-54 - полуавтоматический фотоаппарат с дистанционным управлением оператора. Фотоаппарат оснащен оптической системой компенсации сдвига и автоматической системой контроля экспозиции, корректировка по данным температуры/давления производится автоматически. Фотоаппарат изготавливается в 2-х модификациях с фокусным расстоянием 75 и 100 см. Аэрофотографический комплект состоит из двух фотоаппаратов, каждый вмонтирован в специальное устройство. Для проведения фотографирования в 2-х направлениях (перспективного) и в 3-х направлениях (комбинированного) фотоаппараты могут быть использованы вместе с автоматически поворачивающейся камерой вмонтированной в контейнер АКАФУ-33М. Как вариант: 2 идентичных фотоаппарата, управляемые одним командным прибором, могут быть установлены на носителе.
Таблица 5.
Основные технические характеристики | ||
Разновидности АФА | 54/75-2MP | 54/100-2MP |
Фокусное расстояние, см: | 75 | 100 |
Относительное отверстие объектива: | 1:6,3 | 1:7 |
Ширина области покрытия двумя камерами, в частях от высоты H | ||
2-маршрутное фотографирование: | 0,662*H | 0,518*H |
4-маршрутное фотографирование: | 1,42*H | 1,04*H |
1.6.2 Аэрофотоаппарат для планового и перспективного фотографирования АК-108Ф
Аэрофотоаппарат АК-108Ф предназначен для проведения планового и перспективного фотографирования земной поверхности при одно-, двух- и трехмаршрутной съемке в дневное время суток в целях обнаружения и распознавания объектов съемки в интересах различных областей народного хозяйства и обороны.
Зеркало головное и кассета выполнены вращающимися и имеют возможность поворота в пределах ±90° относительно нулевого положения (плановая съемка), что позволяет производить во время полета перспективную фотосъемку с левого и правого борта ЛА.
Особенности конструкции
Автоматическая система, управляемая от бортовой цифровой вычислительной машины носителя, вырабатывающей соответствующие сигналы по вводимым в нее навигационным и экспонометрическим данным.
Наличие:
· системы автоматического регулирования экспозиции;
· системы линейной компенсации сдвига изображения во время экспонирования;
· системы активной стабилизации сканирующего зеркала;
· системы фокусировки по текущим данным температуры, давления и дальности фотографирования;
· системы встроенного контроля работоспособности аппаратуры;
· системы синхронизации поворота головного зеркала и кассеты.
· Возможность фотосъемки в большом диапазоне изменения скоростей (W) и высот полета (H).
Таблица 6
Фокусное расстояние объектива, мм: | 1800 |
Относительное отверстие объектива: | 1:5 |
Размер кадра, cм: | 18×18 |
Угол поля зрения, °: | 240×19 |
Углы фотосъемки, °: | 0,75 и 80 |
Номинальное значение поперечного и продольного перекрытий между аэрофотосъемками, %: | не менее 20 |
6 | |
Номинальное значение поперечного и продольного перекрытий между аэрофотосъемками, %: | не менее 20 |
1.7. Аэрофотоаппарат для перспективного фотографирования АФА-86П
Применение
Аэрофотоаппарат АФА-86П сконструирован для перспективного фотографирования земной поверхности в дневное время со сравнительно низкой высоты над уровнем моря на различных скоростях для обнаружения и распознавания предметов при фотографировании местности в интересах различных областей народного хозяйства и обороны.
Особенности конструкции
Автоматический аэрофотоаппарат АФА-86П управляется установленной на борту электронно-вычислительной машиной, вырабатывающей соответствующие сигналы по вводимым в нее навигационным и экспонометрическим данным. Особенности конструкции аэрофотоаппарата обеспечивают стабильность оптических характеристик при изменении условий окружающей среды, дистанционный ввод экспонометрических данных, фоторегистрацию навигацинной и рабочей информации во время внутрикадровых интервалов. Аэрофотоаппарат снабжен встроенной системой проверки технических параметров для защиты от повреждений во время работы. Пленка обрабатывается на борту носителя, но аэрофотоаппарат может быть поставлен в двух модификациях по заказу покупателя: с химической обработкой пленки и без химической обработки пленки.
Аэрофотоаппарат АФА-86П предназначен для перспективного фотографирования земной поверхности в дневное время с относительно малых высот в широком диапазоне скоростей полета для обнаружения и идентификации объектов на местности с беспилотных и пилотируемых носителей как на маршруте, так и при выполнении маневров.
Используется с целями:
· обнаружения и распознавания объектов-нарушителей границ водного пространства;
· экологического и природно-охранного контроля лесных массивов.
1.8. Цифровые аэрофотоаппараты (ЦАФА)
Аналитический обзор ЦАФА, результаты которого приведены ниже, проведен по характеристикам иностранных аппаратов. Связано это с тем, что публикаций по отечественным ЦАФА практически нет. Исключение составляет описание системы оптического наблюдения СОН разработки УОМЗ.
Отметим следующие принципиальные особенности, отличающие конструкцию ЦАФА от АФА с аналоговой регистраций, существенные для задач, рассматриваемых в настоящей статье.
· Размеры цифрового регистратора могут достигать десятков мм., в то время как размеры аналогового носителя составляют десятки см., поэтому для увеличения поля зрения принимают специальные проектные решения, рассмотренные далее.
· Зерно (условный пиксел) аэрофотопленки может иметь размер до десятых долей Мкм, в то время пиксел цифрового регистратора ограничен единицами Мкм. Это заставляет разработциков применять специальные решения, например применение нескольких линеек ПЗС, смещенных друг относительно другой на величину, равную дробной части пиксела.
· В таблице 7 представлен один из возможных подходов к классификации цифровых аэрофотоаппаратов, когда в качестве основного критерия используется размер кадра.
Таблица 7. Классификация цифровых аэрофотоаппаратов по размеру регистрируемого кадра
Класс аэрофотоаппаратов | Размер результирующего кадра, Мпкс |
Малоформатные | до 16 |
Среднеформатные | 16–64 |
Широкоформатные | более 64 |
Анализ показывает, что наиболее распространены крупноформатные (широкоформатные) камеры, например, UltraCam-X Prime (Microsoft-Vexcel Imaging GmbH, Австрия), DMC (Intergraph Corp., США), ADS80 (Leica Geosystems AG, Швейцария) [13-15], которые позиционируются производителями в качестве замены аналоговых аэрофотокамер. Для съемки линейных и небольших площадных объектов эффективны среднеформатные камеры.
Для решения комплексных задач воздушной разведки могут задействоваться комбинации камер — крупноформатная камера снимает в направлении надира, среднеформатные под углом к нему (перспективная съемка; например, см. публикацию Как отмечалось, размер одного кадра на аналоговом регистраторе как правило составляет 230x230 мм. После сканирования пленки на специальном фотограмметрическом сканере с типичным разрешением 15 мкм получают цифровые изображения размером 15x15 тыс. пикселов, т. е. больше 200 мегапикселов. В настоящее время светочувствительные матрицы такого размера не производятся. Поэтому для получения цифровых изображений сравнимого размера в камерах UltraCam-X и DMC осуществляется «сшивка» фрагментов изображений, полученных несколькими матрицами. В камере UltraCam-X Prime таких матриц девять. Съемка ведется четырьмя объективами, ее синхронизация выполняется за счет движения летательного аппарата таким образом, чтобы совместить центры проекции объективов. Этот фактор является существенным при разработке математической модели полета носителя ЦАФА. Размер результирующего кадра составляет 14 430х9420 пикселов (136 мегапикселов).
В камере DMC применяется другой подход — съемка четырьмя объективами ведется синхронно с точностью 0,01 миллисекунды. Размер результирующего кадра —13500х8000пикселов (108мегапикселов). Другим подходом для получения цифровых изображений большого размера является использование светочувствительной линейки или группы линеек ПЗС, которая, перемещаясь вместе с самолетом, сканирует пространство предметов. Этот метод, принятый при съемке с космических аппаратов, нашел применение и в аэросъемке (камера ADS80). В отличие от условий формирования спутниковых изображений, когда траектория движения носителя не подвержена колебаниям, аэроизображения требуют дополнительной коррекции, а режим съемки – стабильного горизонтального полета ЛА. Таким образом, факторы нестабильности движения ЛА необходимо учесть в модели возмущенного полета. Крупноформатные камеры UltraCam и DMC используют черно-белые (grayscale) матрицы для получения изображения с высоким разрешением. Одновременно ведется съемка на матрицы с меньшим разрешением, чувствительные в красном, синем, зеленом и инфракрасном диапазонах спектра. Соотношение числа черно-белых и цветных пикселов составляет 22 для DMC и 9 для UltraCam. Для формирования цветных изображений с высоким разрешением для этих камер необходимо использовать алгоритм паншарпенинга (pan-sharpening). Для ADS80 подобные действия не нужны, так как параллельно со съемкой на черно-белую линейку ведется съемка на линейки, чувствительные в красном, синем, зеленом и инфракрасном диапазонах спектра. При этом за счет специальной оптики все линейки имеют единый центр проекции, и процедура получения цветного или спектрозонального изображения сводится к простому «смешиванию» каналов. Однако факторы нестабильности полета носителя данного ЦАФА и в данном случае нуждаются учету в математической модели ЛА в режиме аэрофотосъемки.
Среднеформатные камеры по конструкции существенно проще. Наиболее известными являются камеры: RMK-D (Intergraph Z/I Imaging, США), DSS (Applanix Corp., Канада), RCD100 (Leica Geosystems, Швейцария), Rollei AIC (Trimble Navigation, США), DiMAC Lite (DIMAC Systems, Люксембург). Как правило, эта аппаратура имеет разрешение 20–60 мегапикселов, оснащена светочувствительной матрицей Байра, одним объективом и сразу формирует цветное или инфракрасное изображение. Следует отметить, что в модели полета носителя также необходимо учесть вектор бокового сноса и факторы смаза регистрируемого изображения.
Как отмечалось, важной характеристикой цифровых аэрокамер является физический размер пиксела матрицы. Чем он больше, тем больше фотонов регистрируется в единицу времени, что при прочих равных параметрах позволяет проводить съемку при худших условиях освещенности. Большинство цифровых аэрокамер создают изображения глубиной цвета более 8 бит на пиксел, что позволяет разрешить детали в тенях, недоступные при аналоговой съемке. Угол обзора цифровых камер приблизительно соответствует углу обзора аналоговых камер с фокусным расстоянием 300 мм. Таким образом, цифровые камеры являются длиннофокусными. Быстродействие(число кадров в единицу времени) современных камер такова, что возможна съемка с малых высот, при которых размер пиксела на местности (GSD) составляет единицы (3–5) сантиметров при 60 % перекрытии соседних снимков. Однако в этих режимах существенными становятся смаз и дефокусировка. Поэтому в модели полета носителя ЦАФА необходимо учесть вектор бокового сноса, точность его измерения, а также точность датчиков воздушной скорости ЛА.
Фотограмметрическая обработка снимков, полученных цифровыми кадровыми аэрокамерами, в основном аналогична обработке аналоговых снимков. Более того, процедура внутреннего ориентирования цифровых аэроснимков значительно упрощена и заключается в вводе данных из паспорта камеры. Следует учесть, что съемка цифровыми камерами часто ведется с большим (более 60 %) перекрытием. Это позволяет формировать более качественные ортофотопланы, но накладывает дополнительные условия на работу модулей измерения связующих точек и уравнивания на ЛА, что необходимо учесть при построении математической модели полета носителя.
Для сканирующей камеры ADS80 значительная часть фотограмметрической обработки проводится с использованием программного обеспечения. Некоторые цифровые фотограмметрические системы позволяют выполнять стереообработку (построение ЦМР, рисовку в стереорежиме) и ортотрансформирование материалов, полученных на основе снимков ADS80.
Для монтажа цифровых камер на носителе могут использоваться стандартные гироплатформы или поставляемые вместе с камерой. Для эксплуатации камеры на основе светочувствительной линейки (ADS80) кроме гироплатформы необходимо наличие GPS/IMU-системы. При этом установленный на борту самолета приемник GPS должен работать в дифференциальном режиме (совместно с наземными базовыми станциями) для того, чтобы получить максимально возможную точность обработки. Если же дифференциальным режим недоступен, возможно применение методов PPP (Precise Point Positioning) для обработки данных GPS с применением уточненных эфемерид спутников.
Компания DiMAC Systems производит выпуск крупноформатной аэрокамеры DiMAC WiDE+ с разрешением 13 000х8900 пикселов (116 мегапикселов). Изображение (цветное или инфракрасное) формируется из двух 60-мегапиксельных модулей и не требует паншарпенинга.
Уральский оптико-механический завод производит малогабаритные системы круглосуточного оптического наблюдения СОН-910 и СОН-820. Устанавливают их на беспилотных носителях сухопутного и морского базирования. Используемое в данных системах оборудование (в стандартной комплектации — видеокамеру и тепловизор) монтируют на подвижную часть гиростабилизированной платформы, которая с помощью микромеханических гироскопов компенсирует вибрацию летательного аппарата. В результате частично фильтруются вибрирации относительно земной системы координат, что обуславливает высокую четкость изображения. Следует заметить, что в известных иностранных системах наблюдения чаще всего стабилизируется не положение камеры относительно земли, а ее линия визирования в пространстве. Оптические оси при этом стабилизируются независимо от изменений пространственного положения ЛА. Однако изображение получается размытым, т. к. высокочастотные составляющие вибрации при таком способе не отфильтровываются. Соответственно дальность обнаружения и распознавания объектов у таких систем фактически значительно ниже.
Основные выводы проведенного анализа:
· Известные ЦАФА разрабатываются без учета свойств динамики полета ЛА – носителя.
· В отличие от АФА с регистрацией на аналоговом носителе, учет возможного смаза и дефокусировки в известных ЦАФА не предусмотрен.
· Системы стабилизации ЦАФА дрлжны учитываться на основе характеристик того или иного ЛА – носителя аппаратуры.
2. Стохастическая математическая модель движения летательного аппарата
2.1 Общая форма записи стохастической математической модели и способы ее преобразования
Как известно, наиболее общей формой описания движения ЛА является система обыкновенных дифференциальных уравнений, записанная относительно вектора состояния в нормальной форме Коши и содержащая в своей структуре случайные функции и величины, моделирующие случайные воздействия ![]() , проектные параметры v и начальные условия движения x0 [2]:
, проектные параметры v и начальные условия движения x0 [2]:
 (2.1)
(2.1)
 (2.2)
(2.2)
где ![]() - n-мерный вектор фазовых переменных (векторный СП);
- n-мерный вектор фазовых переменных (векторный СП);
![]() - m-мерный вектор детерминированных функций;
- m-мерный вектор детерминированных функций;
![]() - k-мерный вектор случайных воздействий (векторный СП с заданными моментными характеристиками
- k-мерный вектор случайных воздействий (векторный СП с заданными моментными характеристиками ![]() );
);
![]() - l-мерный вектор случайных проектных параметров (векторная СВ с
- l-мерный вектор случайных проектных параметров (векторная СВ с
заданными моментными характеристиками ![]() ),
),
![]() - n-мерный вектор случайных начальных условий с заданными моментными характеристиками
- n-мерный вектор случайных начальных условий с заданными моментными характеристиками ![]() .
.
Математическую модель вида (2.1), элементы которой описываются в форме (2.2), будем называть стохастической математической моделью (СММ) движения ЛА [2]. Таким образом, СММ движения ЛА формально отличается от детерминированной модели движения только описанием (2.2) входящих в неё переменных.
Совокупность случайных функций ![]() является стохастическим решением для системы стохастических дифференциальных уравнений вида (2.1),(2.2), если для любой выборки случайных функций
является стохастическим решением для системы стохастических дифференциальных уравнений вида (2.1),(2.2), если для любой выборки случайных функций ![]() и случайных величин V и x0из множества всех возможных выборок реализаций, функции
и случайных величин V и x0из множества всех возможных выборок реализаций, функции ![]() дают реализации, являющиеся единственным решением задачи Коши в обычном смысле для заданной системы дифференциальных уравнений.
дают реализации, являющиеся единственным решением задачи Коши в обычном смысле для заданной системы дифференциальных уравнений.
Решение систем обыкновенных стохастических дифференциальных уравнений (2.1) будет единственным, если для любой выборки реализаций случайных функций ![]() , случайных величин V и x0 соответственно решение получающейся системы обыкновенных детерминированных дифференциальных уравнений будет единственным.
, случайных величин V и x0 соответственно решение получающейся системы обыкновенных детерминированных дифференциальных уравнений будет единственным.
Универсальных методов статистического анализа движения, описывающегося СММ вида (2.1), (2.2), сочетающих высокую точность и низкую трудоемкость получения решения, не существует. Как будет показано ниже, для решения задач статистического анализа динамических систем в зависимости от конкретного вида математической формулировки задачи и требований к результату решения разработаны различные методы.
Наиболее часто применяемые виды преобразований :
· Преобразование, направленное на исключение из СММ случайных факторов в виде случайных функций, то есть в правых частях системы дифференциальных уравнений (2.1) должны присутствовать случайные факторы только в виде СВ.
Для решения этой проблемы можно использовать представление случайных функций через их канонические разложения типа (1.58). При этом в правых частях дифференциальных уравнений будут присутствовать дополнительные СВ.
· Преобразование, направленное на исключение из СММ случайных факторов в виде СВ, то есть в правых частях системы дифференциальных уравнений (2.1) должны присутствовать случайные факторы только в виде случайных функций.
Для достижения этой цели векторную СВ V можно “перевести” в случайные начальные условия, добавив к системе (2.1) дополнительную систему из lдифференциальных уравнений вида
 (2.3)
(2.3)
В результате получается расширенная система дифференциальных уравнений(n+l)-го порядка.
· Преобразование, направленное на исключение статистической неопределенности в начальных условиях (2.2).
Это требование может быть выполнено введением новой переменной
![]() . (2.4)
. (2.4)
Тогда математическая модель (2.1), (2.2) может быть представлена в виде
 (2.5)
(2.5)
с неслучайными нулевыми начальными условиями
![]() . (2.6)
. (2.6)
Преобразование, направленное на достижение требования, чтобы все СВ, присутствующие в СММ, были независимыми. Последнее является наиболее приемлемым для решения поставленнфх в работе задач
Этот результат может быть достигнут с помощью линейного преобразования (1.39), (1.40), если СВ удовлетворяют нормальному закону распределения.
2.2 Классификация случайных факторов, действующих на летательный аппарат в полете
По причинам возникновения и изменения во времени случайные факторы принято разделять
· на воздействия, вызванные внешними по отношению к ЛА причинами;
· воздействия, вызванные внутренними процессами происходящими в ЛА;
· разброс исходных данных.
К внешним причинам, вызывающим возмущающие воздействия, обычно относят действие внешних сил, действующих на ЛА в полете. В основном – это флуктуации атмосферы. В зависимости от рассматриваемой задачи о движении ЛА выбирается свой набор и полнота учета внешних сил.
Внутренние причины, вызывающие возмущающие воздействия, обуславливаются неидеальностью системы управления движением и ее приборной реализации, что приводит к отклонению формируемой управляющей силы от программных значений. К внутренним причинам вотносятся следующие факторы :
· Ошибки чувствительных элементов и программирующих устройств. Они зависят от принципа действия системы управления и ее аппаратурного состава. Например, при наличии на борту ЛА инерциальной навигационной системы (ИНС), включающей в свой состав гиростабилизированную платформу (ГСП) с размещенными на ней акселерометрами, рассматриваемый вид ошибок будет состоять из ошибок начальной выставки ГСП, ошибок акселерометров, ухода ГСП вследствие дрейфа и действующих ускорений, ошибок в выдаче программирующим устройством программных величин параметров ИНС.
· Ошибки преобразующих устройств, возникающие в процессе преобразования управляющих сигналов при передаче их на исполнительные органы.
· Ошибки работы исполнительных органов. Если в качестве исполнительного органа используются аэродинамические рули, то рассматриваемый тип ошибок может порождаться переходными процессами системы угловой стабилизации ЛА и неточностью знания аэродинамических характеристик как управляющих поверхностей, так и самого ЛА.
Любой из перечисленных факторов рассматривается, как случайная величина, причем допустимо предположение о нормальном законе распределения плотности вероятности (это справедливо для физических величин, разброс значений которых обусловлен многими причинами). Если случайный фактор представляется в виде случайного процесса (случайной функции), то чаще всего используются предположения о том, что он относится к категории “белый шум” или является стационарным коррелированным случайным процессом.
Удобно выражать случайную функцию x(t) через случайную величину следующим образом:
![]() , (2.7)
, (2.7)
где ![]() и
и ![]() - математическое ожидание и среднеквадратическое отклонение случайного процесса соответственно;
- математическое ожидание и среднеквадратическое отклонение случайного процесса соответственно;
ζ - случайная величина, имеющая стандартный нормальный закон распределения ![]() .
.
Для использования при расчетах и проектировании ЛА, приведения результатов испытаний ЛА и их элементов к одинаковым условиям используется ГОСТ 4401-81 Атмосфера стандартная.
На основании обширного статистического материала, собранного за длительное время, в [9] были сделаны выводы о том, что нестационарная случайная функция r(H) может быть представлена в виде
![]() , (2.8)
, (2.8)
где Mr (H) и s r (H) – математическое ожидание и среднеквадратическое отклонение r (H) соответственно; z (H) – стационарная случайная функция с моментными характеристиками Mz (H)=0; Dz (H)=1.
При этом корреляционная функция Rx (D H) для высот H < 70км может быть приближенно представлена в двух вариантах [9] :
![]() , (2.9)
, (2.9)
![]() . (2.10)
. (2.10)
Вид выражения Rz (D H), а также значения коэффициентов K и W 0 зависят от широты местности, времени года и рассматриваемого высотного слоя. Данные о погрешностях детерминированных моделей могут быть основой для определения s r (H).
3. Частотный метод определения параметра модели вибрационной дефокусировки.
Рассмотренная в разделе 2 модель позволяет применить частотный метод для модельного описания преобразования параметров случайных возмущений, влияющих на процесс арофотосъемки, в частности на формирование пятна рассеяния оптической системы АФА. Далее принимается:
· В режиме аэрофотосъемки ЛА осуществляет горизонтальный полет с постоянной скоростью.
· Отклонения от указанного ренжима обусловлены случайными факторами флюктуации атмосферы.
· В формирование пятна рассеяния вносит вклад вибрации, создаваемые силовой установкой ЛА.
· В указанном режиме допустимо рассматривать процесс преобразования возмущений в линйном приближении.
· Возмущения допустимо рассматривать,как стационарный гауссовский случайный прцесс.
· Формирование пятна рассеяния обусловлено вибрациями ЛА и нескомпенсированными вибрациями платформы АФА.
С учетом принятых допущений для спектральной плотности вибраций АФА можно записать:
Gвых(ν) = Gвх(ν)H(ν)H(-ν)
где:
Gвх(ν) – спектральная плотность случайных возмущений, приложенных к ЛА,
H(ν) – передаточная функции, моделирующая динамику ЛА и гироплатформы.
В этом случае для дисперсии вибраций АФА можно записать:
D = Kr(0)
Kr(x) = ![]() - корреляционная функция случайного процесса.
- корреляционная функция случайного процесса.
В свою очередь, для среднего квадрата отклонений центральной точки аэрофотоснимка.
σ= ![]()
Полученная величина σ с учетом масштабирующуго коэффициента k является основной в модели импульсного отклика объектива АФА при учете вибрационной дефокусировки. Таким образом, возникает возможность решать задачу деконволюции не прибегая к методу слепой деконволюции, точность которого значительно ниже.
Рассмотренные модели позволяют решать следующие задачи:
· Прямую, заключающуюся в формировании полетного задания с учетом реального полета ЛА в режиме аэрофотосъемки.
· Обратную, когда полученные аэрофильмы реконструируются путем компесации смаза и дефокусировки.
Литература
1. Кулагин С. В., Апарин Е. М. Проектирование фото- и киноприборов. М, Машиностроение, 1986 г.
2. Савиных В. П., Кучко А. С., Стеценко А. Ф. Аэрокосмическая фотосъемка. "Картгеоцентр" – "Геодезиздат", 1997 г.
3. Аэрофотоаппарат автоматический М-167. Руководство по технической эксплуатации 32.22.255.РЭ.
4. Аэрофотоаппарат автоматический АП-402. Руководство по технической эксплуатации 32.22.255.РЭ.
5. Лаврова Н. И., Стеценко А. Ф. Аэрофотосъемка. Аэрофотосъемочное оборудование.
6. Мосеев А. В., Филиппов М. В., Чичварин Н. В. Математическая модель оптико-электронного прибора для решения задачи синтеза в САПР// Тез. докл. на советском национальном комитете международной ассоциации по математическому и машинному моделированию, Горький, 1987 г.
7. Тихонов А. Н., Арсенин В. Я. Методы решения некорректных задач. Учебное пособие для ВУЗов. М.: Наука, 1986 г.
8. Верлань А. Ф., Сизиков В. С. Интегральные уравнения: методы, алгоритмы, программы. Справочное пособие. Киев: Наукова думка, 1986 г.
9. Мосягин Г. М., Немтинов В. Б., Лебедев Е. Н. Теория оптико-электронных систем.
10. Учебник для студентов ВУЗов по оптическим специальностям, М, Машиностроение, 1990г.
11. Т.М. Волосатова, А.В. Воронов, Н.В. Чичварин Математическое и программное обеспечения решения задач анализа и синтеза для САПР оптико-электронных систем. «Компъютерные технологии», №2, 2008г.
12. Статистический анализ динамических систем (анализ движения летательных аппаратов в условиях статистической неопределенности):Учебное пособие / И.В. Белоконов. Самарский госуд. аэрокосм. ун-т. Самара, 2001.
13. www.laserlocation.ru/chapter8.html
14. venta-vlg.ru›blog/aerofotoapparaty.html
15. geoprofi.ru›default.aspx
Публикации с ключевыми словами: комплекс, самолет, воздушная разведка, динамика полета, аэрофотоаппарат, регистратор, смаз, дефокусировка
Публикации со словами: комплекс, самолет, воздушная разведка, динамика полета, аэрофотоаппарат, регистратор, смаз, дефокусировка
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||