научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 12, декабрь 2011
МГТУ им. Н.Э. Баумана
Одной из важных задач в курсе «Проектирование приводов станков» является процесс перехода от теоретических моделей к управлению реальным двигателем. Этот вопрос удобно осветить на основе схемы управления двигателем постоянного тока.
Двигатели постоянного тока широко использовались в отечественных станках с ЧПУ (например, двигатель ДТ550ПГ в станке МС12-250). Современная элементная база позволяет спроектировать надежное и недорогое устройство управления этими двигателями. В данной статье описаны методики разработки схем управления высокомоментными двигателями постоянного тока на биполярных и полевых транзисторах.
Как правило, управление двигателем постоянного тока осуществляется изменением напряжения, подаваемого на концы обмотки якоря. Для реверсирования двигателя необходимо менять полярность этого напряжения. Для этого используется мостовая схема (Н-мост), состоящая из четырех силовых ключей и различных управляющих элементов. Управляющий сигнал, подаваемый на силовую часть схемы, в обоих случаях генерировался с помощью микроконтроллера ATmega8 фирмы ATMEL. Для изменения напряжения (аналогового сигнала) используется широтно-импульсная модуляция (ШИМ). Микроконтроллер генерирует на выводе OC1A ШИМ-сигнал с определенным коэффициентом заполнения (см. рис. 1).
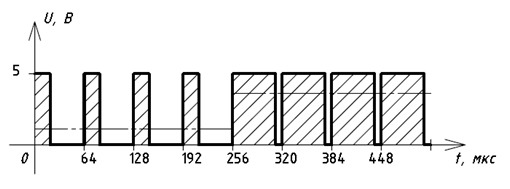
Рисунок 1. ШИМ – сигнал.
Коэффициент заполнения определяет среднее значение напряжения, которое может составлять от 0 до 5 В на выводе микроконтроллера, что соответствует 0..43 В, подаваемым на обмотку якоря двигателя. На графике показаны сигналы с коэффициентом заполнения 0,25 и 4. Пунктирная линия соответствует средним значениям напряжения – 1 В и 4 В соответственно. Коэффициент заполнения устанавливается с помощью установки значения регистра OCR1AL (для 8-битного ШИМ, который используется для управления двигателем). Это позволяет установить 256 различных скоростей вращения электродвигателя. Значению OCR1AL = 0 соответствует среднее напряжение на выводе OC1A 0 В (скорость двигателя 0 мин-1), значению OCR1AL = 255 соответствует напряжение 5 В (номинальная скорость двигателя – 1500 мин-1 без нагрузки). Частота ШИМ-сигнала составляет 4 000 000 / 256 = 15 625 Гц.
Силовая часть мостовой схемы, спроектированной на биполярных транзисторах, приведена на рисунке 2. Она состоит из четырех силовых транзисторов, двух управляющих транзисторов, резисторов, ограничивающих базовые токи, шунтирующих диодов и гальванической развязки в виде двух оптопар. Питание Н-моста происходит от блока питания, подающего постоянное напряжение +50 В относительно земли.
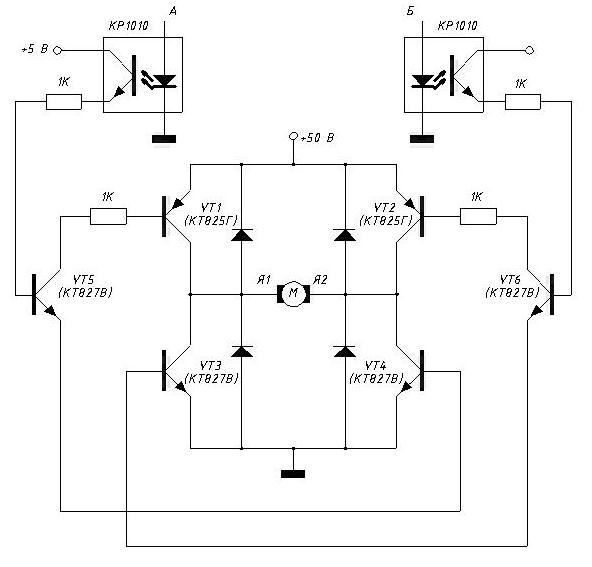
Рисунок 2. Блок управления двигателем на биполярных транзисторах
Входным сигналом являются напряжения на каналах А и Б. Возможны три режима работы:
1) На канал А подается ШИМ-сигнал (или постоянное положительное напряжение +5 В), на канал Б – 0 В. Управляющий транзистор VT5 открыт, VT6 – закрыт. Через сопротивление 1 КОм в цепи коллектора транзистора VT5 протекает ток, открывающий транзисторы силовые VT1 и VT4; транзисторы VT2 и VT3 закрыты. Таким образом на конце обмотки Я1 потенциал составляет +50 В, на конце обмотки Я2 – 0В. Вал двигателя вращается по часовой стрелке.
1) На канал Б подается ШИМ-сигнал (или постоянное положительное напряжение +5 В), на канал А – 0 В. Управляющий транзистор VT6 открыт, VT5 – закрыт. Через сопротивление 1 КОм в цепи коллектора транзистора VT6 протекает ток, открывающий транзисторы силовые VT2 и VT3; транзисторы VT1 и VT4 закрыты. Таким образом на конце обмотки Я1 потенциал составляет 0 В, на конце обмотки Я2 – +50 В. Вал двигателя вращается по часовой стрелке.
в) На оба канал подается 0 В. Все тразисторы закрыты, на концах обоих обмоток потенциал 0 В. Вал двигателя не вращается.
В случае подачи положительного напряжения на оба канала А и Б произойдет короткое замыкание; этот случай предотвращается управляющей частью схемы.
Все транзисторы работают в ключевом режиме, т.е. при подаче тока на базу «открываются» (переходят в режим насыщения), в противном случае «закрыты» (режим отсечки). В таком режиме работы мощность, выделяющаяся на транзисторах минимальна.
Транзисторы VT1 и VT2 должны обеспечивать подачу потенциала +50 В к ДПТ; поскольку максимальное напряжение в схеме +50 В, были выбраны биполярные транзисторы pnp-типа. Транзисторы VD3 и VD4 должны заземлять концы обмоток якоря ДПТ, поэтому были выбраны биполярные транзисторы npn-типа. Управляющие транзисторы также представляют собой биполярные транзисторы npn-типа в силу их невысокой стоимости.
Резисторы в цепях баз силовых и управляющих транзисторах рассчитаны так, чтобы обеспечивать полное открытие (переход в режим насыщения) в широком температурном диапазоне, и при этом не создавать излишне высоких токов в цепях баз транзисторов.
Характерной особенностью ДПТ является резкое увеличение тока базы в момент пуска; измеренный ток составляет 10 А.
Поскольку нагрузка силовой части схемы представляет собой индуктивность (обмотка якоря ДПТ), в момент закрытия силовых транзисторов между их эмиттерами и коллекторами происходит резкое увеличение обратного напряжения, что может привести к выходу из строя транзисторов. Для предотвращения этого в схеме предусмотрены шунтирующие диоды.
Для гальванической развязки силовой и управляющей частей схемы используются две оптопары (по одной на каждый канал – А и Б), что обеспечивает надежную защиту микроконтроллера от непредвиденных ситуаций.
Требования к силовым транзисторам:
– максимальное напряжение между коллектором и эмиттером Uкэr max не меньше 50 В;
– максимально допустимый коллекторный ток Iк max не меньше 10 А;
– частота срабатывания не меньше 1 МГц.
С учетом этих требований были выбраны следующие транзисторы:
VT1, VT2 – КТ825Г. Их параметры приведены в таблице 1.
Таблица 1. Параметры транзисторов КТ825Г
Параметр | Обозначение | Единица измерения | Значение |
Структура | - | - | pnp |
Максимальное напряжение коллектор-база | Uкбо max | В | 90 |
Максимальное напряжение коллектор-эмиттер | Uкэr max | В | 70 |
Максимально допустимый ток коллектора | Iк max | А | 20 |
Статический коэффициент передачи тока | h21э min | - | 750 |
Граничная частота передачи тока | fгр | МГц | 4 |
Максимальная рассеиваемая мощность | Рк | Вт | 125 |
VT3, VT4 – КТ827В. Их параметры приведены в таблице 2.
Таблица 2. Параметры транзисторов КТ827В
Параметр | Обозначение | Единица измерения | Значение |
Структура | - | - | npn |
Максимальное напряжение коллектор-база | Uкбо max | В | 60 |
Максимальное напряжение коллектор-эмиттер | Uкэr max | В | 60 |
Максимально допустимый ток коллектора | Iк max | А | 20 |
Статический коэффициент передачи тока | h21э min | - | 750 |
Граничная частота передачи тока | fгр | МГц | 4 |
Максимальная рассеиваемая мощность | Рк | Вт | 125 |
Управляющие транзисторы VT5 и VT6 были также выбраны КТ827В.
Максимальный коллекторный ток на силовых транзисторах (при пуске двигателя) составляет 10 А. Чтобы обеспечить переход транзисторов в режим насыщения, базовый ток Iб должен быть не меньше

С учетом падения на переходах база-эмиттер напряжения 0,6 В и разности потенциалов между коллектором и эмиттером управляющих транзисторов 0,2 В, максимальные сопротивления в базовых цепях составят:
![]()
где Uпит = 50В – напряжение источника питания.
Были выбраны сопротивления Rб = 1 кОм. Таким образом, базовый ток составил
![]()
Мощность, рассеивающаяся на сопротивлениях составит:
![]()
Были выбраны резисторы, рассеивающие мощность до 5 Вт.
Сопротивления в базовых цепях управляющих транзисторов были выбраны такие же, как в базовых цепях управляющих транзисторов.
Основные требования к шунтирующим диодам:
– шунтирующие диоды должны открываться/закрываться быстрее силовых транзисторов; Максимальное время открытия силовых транзисторов (с учетом граничной частоты 4 МГц) составит 0,25 мкс.
– максимальное обратное напряжение не меньше 50 В.
С учетом этих требований были выбраны диоды 40EPF02. Их параметры приведены в таблице 3.
Таблица 3. Параметры диодов 40EPF02
Параметр | Единица измерения | Значение |
Максимальное обратное напряжение | В | 200 |
Рабочая частота | МГц | 1 |
Максимальное время обратного восстановления | мкс | 0,18 |
В качестве оптопар были выбраны KP1010. Их параметры приведены в таблице 4.
Таблица 4. Параметры оптопар KP1010
Параметр | Единица измерения | Значение |
Тип оптопары | - | Сдвоенный фототранзистор |
Напряжение изоляции | кВ | 5 |
Максимальный прямой ток | А | 50 |
Максимальное выходное напряжение | В | 60 |
Время включения/выключения | нс | 3 |
Силовая часть мостовой схемы, спроектированной на полевых транзисторах с изолированным затвором (MOSFET), приведена на рисунке 2.Силовой блок преобразует входной ШИМ-сигнал напряжением 0..5 В из логической части в мощный сигнал напряжением 100 В, подаваемый на концы обмотки якоря двигателя постоянного тока. Для обеспечения возможности реверса (т.е. подачи напряжения разной полярности на обмотку якоря) используется схема, известная под названием Н-мост. Силовой блок (см. рис. 3) состоит из моста на четырех полевых транзисторах с изолированным затвором, драйверов транзисторов с соответствующей обвязкой и логической схемы, анализирующей сигналы с микроконтроллера.
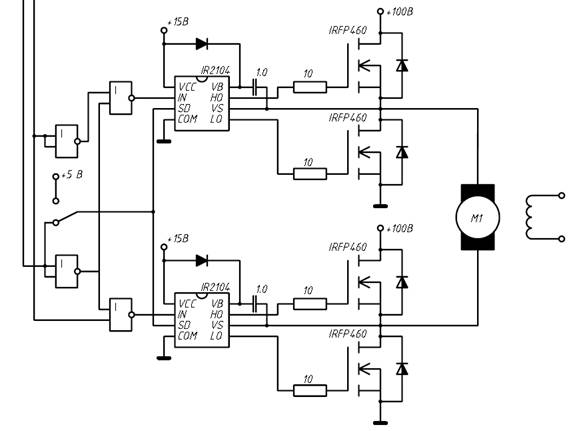
Рисунок 3. Блок управления двигателем на полевых транзисторах
Н-мост может работать в двух режимах:
1. Во время остановки двигателя транзисторы VT1 и VT3 закрыты, транзисторы VT2 и VT4 открыты. На концах обмоток якоря двигателя постоянного тока присутствует потенциал земли. При вращении вала двигателя по часовой стрелке транзисторы VT2 и VT3 закрыты, VT4 открыт, VT1 открывается в соответствии с ШИМ сигналом. При вращении вала двигателя против часовой стрелки транзисторы VT1 и VT4 закрыты, VT2 открыт, VT3 открывается в соответствии с ШИМ сигналом. Индуктивные токи, возникающие при отключении ШИМ-сигнала на транзисторах VT1 и VT3 “сбрасываются на землю” через транзисторы VT2 и VT4, что приводит к их повышенному нагреву. Поскольку во время остановки концы обмоток якоря замкнуты на общий провод (землю), торможение двигателя происходит достаточно быстро.
2. Во время остановки двигателя все транзисторы закрыты. На концах обмоток якоря двигателя постоянного тока присутствуют одинаковые потенциалы, примерно равные половине напряжения питания силовой части. При вращении вала двигателя по часовой стрелке транзисторы VT2 и VT3 закрыты, VT1 открывается в соответствии с ШИМ сигналом, VT4 открывается в соответствии с инвертированным ШИМ-сигналом. При вращении вала двигателя по часовой стрелке транзисторы VT1 и VT4 закрыты, VT3 открывается в соответствии с ШИМ сигналом, VT2 открывается в соответствии с инвертированным ШИМ-сигналом. Индуктивные токи, возникающие при отключении ШИМ-сигнала на транзисторах VT1 и VT3 сбрасываются через шунтирующие диоды на транзисторах.
Режим работы H-моста задается с помощью ключа К1. Оптимальный режим работы зависит от частоты ШИМ-сигнала, характера нагружения привода и используемых транзисторов.
Основные требования к транзисторам моста:
- максимальное напряжение между стоком и истоком Uси max не меньше 150 В;
- максимально допустимый ток сток-исток Iси max не меньше 15 А;
- частота срабатывания не меньше 1 МГц.
С учетом этих требований были выбраны быстродействующие полевые транзисторы с изолированным затвором (MOSFET) IRFP460. Основные их характеристики указаны в таблице 5.
Таблица 5. Основные параметры транзисторов IRFP460
Параметр | Обозначение | Единица измерения | Значение |
Структура | - | - | N-канал |
Максимальное напряжение сток-исток | Uси max | В | 600 |
Максимальное напряжение затвор-исток | Uзи max | В | ±20 |
Максимальный ток сток-исток | Iси max | А | 20 |
Сопротивление канала в открытом состоянии | Rси | мОм | 270 |
Максимальная рассеиваемая мощность | Рси | Вт | 280 |
Для быстрого переключения полевых транзисторов необходимо заряжать их затворы с большой скоростью. Для этого в схеме установлены специальные микросхемы – драйверы MOSFET. Драйвер должен осуществлять следующие функции:
- переключать напряжение на затворах в пределах от 0 до 120 В (в верхнем плече если транзистор открыт);
- перезаряжать затворы транзисторов достаточно большим током;
- обеспечивать невозможность одновременного включения транзисторов верхнего и нижнего плеча (т.е. возможность короткого замыкания) ; для этого необходима задержка не менее 200 нс.
С учетом этих требований были выбраны драйверы IR2104. Их параметры указаны в таблице 6.
Таблица 6. Параметры драйверов IR2104
Параметр | Единица измерения | Значение |
Тип драйвера | - | H/L-Side |
Выходной ток втекающий/вытекающий | А | 0,12/0,27 |
Напряжение высоковольтной части | В | 600 |
Напряжение логической части | В | 3,3/5/15 |
Максимальное выходное напряжение | В | 20 |
Время задержки | нс | 520 |
Время включения/выключения | нс | 150 |
Затворы полевых транзисторов соединены с выводами HO (верхнее плечо) и LO (нижнее плечо) через резисторы 10 Ом для ограничения тока перезарядки затворов до 150 мА. Для открытия N-канальных полевых транзисторов необходимо им подать на затвор напряжение +10..+15 В относительно истока; это значит, что на затвор транзистора верхнего плеча драйвер должен подавать +15 В в момент открытия и +115 В для удержания транзистора в открытом состоянии (при том, что напряжение на выходе блока питания составляет +100 В). Для этого применяется т.н. бутстрепный метод управления силовыми ключами. Работает он следующим образом: в момент, когда входящий сигнал равен нулю (“впадина” ШИМ-сигнала) напряжение на выводе VS драйвера также равно нулю, т.к. открыт транзистор нижнего плеча полумоста. Напряжение питания драйвера (+15 В) больше нуля, поэтому через диод между выводами VCC и VB драйвера происходит зарядка конденсатора между выводами VB и VS. При переключении входящего сигнала в состояние логической единицы (“выступ” ШИМ-сигнала), транзистор нижнего плеча закрывается, заряженный конденсатор оказывается “подпертым” со стороны выхода VS и начинает разряжаться в затвор верхнего транзистора. Целесообразно использовать с минимальным саморазрядом (танталовые); однако из-за потерь в любом случае не рекомендуется работать с коэффициентом заполнения ШИМ больше 90% (чтобы давать возможность конденсатору подзарядиться). Расчет емкости конденсатора рекомендуется производить по следующей формуле:
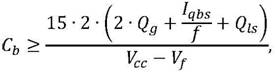
где Vcc = 15 В – напряжение питания схемы управления, Vf = 0,8 В – падение напряжения на диоде, Qg – заряд затвора полевого транзистора, Iqbs = 30 мкА, f = 4 МГц – частота коммутации, Qls = 5 нКл – циклическое изменение заряда драйвера. Заряд затвора транзистора IRFP460 можно найти из графика в документации (рис. 4)
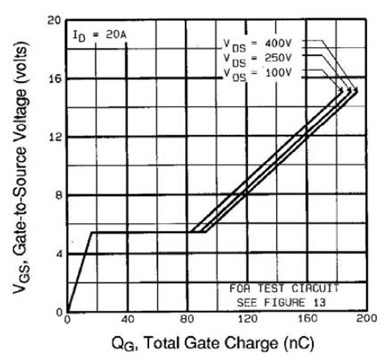
Рисунок 4. Заряд затвора транзистора IRFP460
Из графика видно, что при напряжении сток-исток VDS = 100 В и напряжении затвор-исток VGS = 15 В заряд затвора составляет 170 нКл.
Подставляя все данные, получим:
![]()
Принимаем Cb = 1.0 мкФ.
Диоды, через которые идет зарядка конденсаторов, должны выдерживать обратное напряжение 110 В. Сопротивления в цепи затворов должны рассеивать мощность не менее 1,5 Вт.
В зависимости от сигналов на входе силовой части, необходимо подавать определенные напряжения на входы драйверов IN1 и IN2. Это обеспечивается логической схемой; таблица истинности логической схемы приведена в таблице 7.
Для сокращения количества логических элементов используются элементы ИЛИ-НЕ микросхемы CD4001B.
Таблица 7. Таблица истинности логической схемы
ШИМ | реверс | IN1 | IN2 |
0 | 0 | 0 | 0 |
0 | 1 | 0 | 0 |
1 | 0 | 1 | 0 |
1 | 1 | 0 | 1 |
Описанные методики проектирования и расчета силовых схем управления двигателями постоянного тока позволяют в короткий срок разработать устройство с необходимыми характеристиками, что бывает полезно при замене старых схем управления на новые (при модернизации отечественных станков с ЧПУ, например, МС12250), а также в учебных целях. Проектирование силовых частей схем управления приводов станков на базе синхронных двигателей производится аналогичным образом, однако схема становится трехфазной. Поэтому данные алгоритмы могут быть полезны при изучении курса «Проектирование приводов станков» в целом, так как они охватывают наиболее часто используемые типы приводов станков.
Литература
1. Евстифеев А.В. Микроконтроллеры AVR семейств Tiny и Mega фирмы ATMEL. М.: Издательский дом «Додека - XXI», 2007.
2. Мортон Джон. Микроконтроллеры AVR. Вводный курс. М.: Издательский дом «Додека - XXI», 2006.
3. Семенов Б.Ю. Силовая электроника. М.: СОЛОН-ПРЕСС, 2008.
4. Хоровиц П., Хилл У. Искусство схемотехники. М.: МИР, 2009.
Публикации с ключевыми словами: транзистор, управление, двигатель постоянного тока
Публикации со словами: транзистор, управление, двигатель постоянного тока
Смотри также:
- 77 - 30569/233615 Синтез управления плоской моделью корабля при неполном измерении вектора состояния
- Анализ модели развития раковой опухоли и построение схем антиангиогенной терапии на начальной стадии
- 77-30569/330374 Практическое управление качеством МАТЕС проекта ROV-гидробота в конкурентной среде соревнований
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||