научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 11, ноябрь 2011
УДК 621.396.96
НИИ РЭТ МГТУ им. Н.Э. Баумана
В классической схеме РЛС с инверсным синтезом апертуры (ИСА) для получения высокого разрешения по азимутальной координате используется преобразование Фурье. Перед выполнением преобразования Фурье необходимо в отраженном сигнале скомпенсировать фазовый член, вызванный наличием радиального движения цели. Процедура учета радиального движения в процессе обработки обычно называется «компенсация движения» или «фокусировка» и состоит из двух последовательных этапов:
- выравнивание временных запаздываний профилей дальности («выравнивание по дальности» - «rangealighment»);
- устранение в принятом сигнале нелинейного изменение фазы («фазовая настройка» - «phaseadjnsmtnt»).
Целью настоящей статьи является проведение сравнительного анализа известных методов компенсации движения с точки зрения помехоустойчивости по результатам математического моделирования.
Типовым методом процедуры «выравнивание по дальности» являются корреляционный метод [1, 2], метод минимума энтропии [2], метод преобразования Радона [3, 4].
Типовыми методами процедуры «фазовая настройка» являются: метод фазового градиента [4], метод контрастной оптимизации [5,6]. Первый метод относится к классу непараметрических алгоритмов, второй – к классу параметрических.
Рассмотрим процедуру «компенсация движения» в РЛС с ИСА на примере формирования радиолокационного изображения (РЛИ) цели, летящей по наклонной прямолинейной траектории со скоростью ![]() относительно РЛС. Наблюдение цели осуществляется неподвижной когерентной РЛС, излучающей широкополосный сигнал с несущей частотой
относительно РЛС. Наблюдение цели осуществляется неподвижной когерентной РЛС, излучающей широкополосный сигнал с несущей частотой ![]() ГГц и полосой
ГГц и полосой ![]() МГц.
МГц.
Введем следующие системы координат (рис. 1):
1) нормальная система координат радиолокационной станции (![]() ). Начало координат совмещено с РЛС;
). Начало координат совмещено с РЛС;
2) нормальная система координат цели (![]() ), начало системы координат совмещено с центром масс цели. В течение времени наблюдения цели оси координат (
), начало системы координат совмещено с центром масс цели. В течение времени наблюдения цели оси координат (![]() ) остаются параллельными осям координат ((
) остаются параллельными осям координат ((![]() );
);
3) связанная система координат (![]() ),начало системы координат совмещено с центром масс цели. Ось
),начало системы координат совмещено с центром масс цели. Ось ![]() направлена вдоль продольной оси цели. Ось
направлена вдоль продольной оси цели. Ось ![]() располагается в плоскости симметрии ЛА и направлена вверх. Поперечная ось
располагается в плоскости симметрии ЛА и направлена вверх. Поперечная ось ![]() направлена вправо от направления движения. Положение связанной системы координат
направлена вправо от направления движения. Положение связанной системы координат ![]() относительно нормальной системы координат
относительно нормальной системы координат ![]() определяется с помощью углов рысканья
определяется с помощью углов рысканья ![]() , тангажа
, тангажа ![]() и крена
и крена ![]() . Для перехода от связанной системы координат к нормальной используется матрица перехода
. Для перехода от связанной системы координат к нормальной используется матрица перехода ![]() :
:
| (1) |
 ,
,где ![]() ;
;
![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() .
.
|
Рис. 1. Системы координат, используемые для моделирования |

Тогда координаты ![]() - ого ЛЦР в нормальной системе координат
- ого ЛЦР в нормальной системе координат ![]() будут вычисляться следующим образом:
будут вычисляться следующим образом:
| (2) |
где  - координаты
- координаты ![]() - ого ЛЦР в связанной системе координат (
- ого ЛЦР в связанной системе координат (![]() );
);
 - вектор, определяющий положение «m»-ой ЛЦР в нормальной системе координат цели
- вектор, определяющий положение «m»-ой ЛЦР в нормальной системе координат цели![]() .
.
Пусть моделируемая система ЛЦР двигается со скоростью V = 800 м/с в системе координат РЛС под углами к осям ![]() ,
, ![]() ,
, ![]() (рис. 1). Тогда матрица перехода
(рис. 1). Тогда матрица перехода ![]() будет иметь следующий вид:
будет иметь следующий вид:
| (3) |
 .
.Для примера будем рассматривать совокупность двух ЛЦР со следующими параметрами:
Для определения траектории движения цели зададим начальные координаты движения ![]() ,
, ![]() ,
, ![]() в нормальной системе координат РЛС и определим временные зависимости расстояния от цели до РЛС и косинусы углов вектора скорости цели
в нормальной системе координат РЛС и определим временные зависимости расстояния от цели до РЛС и косинусы углов вектора скорости цели ![]() ,
, ![]() ,
, ![]() .
.
При движении цели со скоростью V расстояние между РЛС и центром масс цели изменяется во времени как:
| (4) |
где ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() - косинусы углов вектора скорости цели (косинусы углов оси
- косинусы углов вектора скорости цели (косинусы углов оси ![]() с положительным направлением осей координат
с положительным направлением осей координат ![]() ,
, ![]() ,
, ![]() ), а направляющие косинусы линии визирования
), а направляющие косинусы линии визирования ![]() , направленной от фазового центра РЛС к центру масс цели и заданной двумя точками (
, направленной от фазового центра РЛС к центру масс цели и заданной двумя точками (![]() ) и (
) и (![]() ), определяются следующими соотношениями:
), определяются следующими соотношениями:
| (5) |
 ,
,  ,
,  .
.В приближении дальней зоны положение какой-либо точки на поверхности цели относительно РЛС характеризуется расстоянием
| (6) |
где ![]() – скалярное произведение двух векторов, представленных в матричной форме;
– скалярное произведение двух векторов, представленных в матричной форме;
 - вектор направляющих косинусов линии визирования;
- вектор направляющих косинусов линии визирования;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
В (5) и (6) введено текущее время t относительно опорного времени ts = ts*, полагая, что в моменты времени ts*(t=0) и ts*+t (t=T) – время синтезирования апертуры антенны цель находится в пределах створа лепестка диаграммы направленности антенны.
В случае аппроксимации радиолокационной цели совокупностью независимых изотропно отражающих ЛЦР, жестко связанных по расстоянию, комплексная амплитуда отраженного сигнала может быть представлена в следующей время-частотной форме:
| (7) |
 ,
,где ![]() - амплитуда сигнала, отраженного от
- амплитуда сигнала, отраженного от ![]() - го ЛЦР;
- го ЛЦР;
![]() - фаза сигнала, отраженного от
- фаза сигнала, отраженного от ![]() - го ЛЦР;
- го ЛЦР;
![]() - число ЛЦР;
- число ЛЦР;
![]() - текущее расстояние между РЛС и центром масс объекта.
- текущее расстояние между РЛС и центром масс объекта.
Первым этапом обработки радиолокационного сигнала в РЛС с синтезированием аппретуры является построение дальностного портрета (ДП), для чего принятый сигнал ![]() умножается на опорную функцию
умножается на опорную функцию
| (8) |
 ,
,компенсирующую сдвиг РЛИ из-за смещения центра масс цели при ее движении по траектории. Далее синтез ДП сводится к преобразованию Фурье:
| (9) |
 .
.Функция ![]() описывает распределение отражательной способности цели по оси дальности в момент времени
описывает распределение отражательной способности цели по оси дальности в момент времени ![]() (ось
(ось ![]() на рис. 1).
на рис. 1).
В дискретном виде формула (10) для фиксированного момента времени ![]() записывается в следующем виде:
записывается в следующем виде:
| (10) |
 ,
,При этом получается вектор комплексных значений распределения по дальности.
На рис. 2 приведен полученный таким способом дальностный портрет рассматриваемой модели цели в виде совокупности точек в два момента времени.
|
Рис. 2. Дальностный портрет в различные моменты времени |

Из рис. 2 видно, что имеет место временное смещение дальностного портрета при его регистрации РЛС в процессе полета ЛА. Построенную модель будем использовать для анализа процедур компенсации движения.
Выравнивание по дальности. Корреляционный метод.
При использовании корреляционного метода производится определение временных запаздываний профилей дальности цели по максимумы их корреляции в различные моменты времени.
Процедура заключается в следующем [2]:
- регистрация реализаций дальностного портрета цели, полученных в разные моменты времени по формулам:
| (11) |
 ;
;- вычисление взаимной корреляционной функции (ВКФ) этих реализаций:
| (12) |
и определение сдвига ![]() , при котором значение ВКФ максимально;
, при котором значение ВКФ максимально;
- оценка радиальной скорости:
| (13) |
 .
.В дискретном виде операция (12) будет выглядеть следующим образом:
| (14) |
 ,
,где ![]() вводится через время корреляции
вводится через время корреляции ![]() .
.
На рис. 3 приведена зависимость (13) для рассматриваемого случая.
|
Рис. 3. Вид функции (12) |
По оценке максимума определяется значение радиальной скорости цели.
Выравнивание по дальности. Метод минимума энтропии.
При использовании метода минимума энтропии временные запаздывания профилей дальности устанавливаются согласно следующему алгоритму.
- регистрация реализаций дальностного портрета цели, полученных в разные моменты времени по формуле (12).
- вычисление функции вида:
| (15) |
 .
.и определение сдвига ![]() , при котором значение (15) минимально. На рис. 4 приведен вид функции (15).
, при котором значение (15) минимально. На рис. 4 приведен вид функции (15).
|
Рис. 4. Вид функции (15) |

Выравнивание по дальности. Метод преобразования Радона.
Преобразованием Радона называется отображение функции ![]() , заданной на плоскости во множество ее интегралов по всем прямым, лежащим в этой плоскости. Суть процедуры определения радиальной скорости с его помощью заключается в последовательности прямых и обратных преобразований Фурье дальностного портрета по заданным оконным функциям и поиске максимума:
, заданной на плоскости во множество ее интегралов по всем прямым, лежащим в этой плоскости. Суть процедуры определения радиальной скорости с его помощью заключается в последовательности прямых и обратных преобразований Фурье дальностного портрета по заданным оконным функциям и поиске максимума:
| (16) |
 ,
,
| (17) |
 ,
,
| (18) |
 .
.В результате преобразований (16)-(18) от дальностного портрета получается двумерная матрица значений, характеризующая перемещение рассевающих центров, находящихся в разных элементах разрешения с определенными скоростями. На рис. 5 показан результат преобразования (18) для рассматриваемого модельного случая наблюдения точечной цели. По положению максимума (яркая точка на рис. 5 определяется радиальная скорость цели).
|
Рис. 5. Вид функции (18) |

Для исследования устойчивости работы алгоритмов автофокусировки были проведены модельные исследования качества оценки радиальной скорости цели в зависимости от отношения сигнал/шум на входе приемного устройства (рис. 6). Среднеквадратическое отклонение оценки радиальной скорости цели от заданного значения при использовании корреляционного метода составляет менее 5 % при отношении сигнал/шум ~ 27 дБ, а при использовании преобразовании Радона - ~ 13 дБ.
|
Рис. 6. Зависимость СКО оценки скорости цели от отношения сигнеал/шум |

Высокое разрешение по азимуту в РЛС с инверсным синтезированием апертуры достигается за счет использования длительного по времени когерентного сигнала, накопленного в процессе наблюдения за перемещающейся целью. При этом угловой интервал синтезирования апертуры антенны определяется следующим образом:
| (19) |
где ![]() - косинус угла поворота линии визирования цели за время (t = 0, t = Tn).
- косинус угла поворота линии визирования цели за время (t = 0, t = Tn).
Для получения азимутального портрета (АП) сигнал умножается на опорную функцию, вычисленную с учетом оценки дальности ![]() :
:
| (20) |
 ,
,и устраняющую квадратичное изменение фазы. Тогда далее синтез АП сводится к преобразованию Фурье:
| (21) |
 ,
,где ![]() - доплеровский сдвиг частоты отраженного сигнала (4), который зависит от азимутальной координаты
- доплеровский сдвиг частоты отраженного сигнала (4), который зависит от азимутальной координаты ![]() (рис. 1).
(рис. 1).
Функция ![]() характеризует распределение отражательной способности цели по азимутальной оси
характеризует распределение отражательной способности цели по азимутальной оси ![]() .
.
В дискретном виде формула (21) для фиксированного значения частоты ![]() записывается в следующем виде:
записывается в следующем виде:
| (22) |
 .
.Для построения азимутального портрета необходимо провести процедуру фазовой настройки и оценить значение углового ускорения цели.
Фазовая настройка. Метод фазового градиента.
Процедура, описывающая метод фазового градиенте следующая.
- оценка градиента фазы по сигналу от опорного отражателя;
- определение фазы сигнала от опорного отражателя;
- формирование опорной функции и фазовая коррекция отраженного от ЛА сигнала;
В основе параметрической процедуры лежит аппроксимация текущего расстояния между РЛС и центром масс цели рядом Тейлора относительно момента времени ![]() .
.
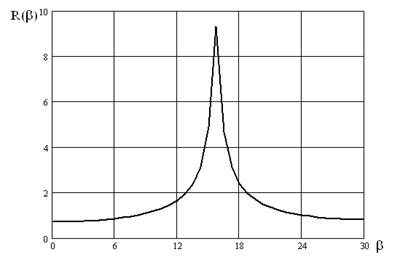
Фазовая настройка. Метод контрастной максимизации.
Метод контрастной максимизации заключается в поиске значений параметра ![]() , при котором функция
, при котором функция
| (23) |

достигает максимума:
|
|
 .
.В (23) ![]() - оператор математического ожидания,
- оператор математического ожидания, ![]() , определяется по формулам (21), (22)
, определяется по формулам (21), (22) ![]() - оценка радиальной скорости. На рис. 7 приведена зависимость (23) для рассматриваемого модельного случая.
- оценка радиальной скорости. На рис. 7 приведена зависимость (23) для рассматриваемого модельного случая.
|
Рис. 7. Вид функции (23) |

По полученным зависимостям были определены значения радиальной скорости и радиального ускорения. Сравнение этих значений с полученными путем последовательного дифференцирования (5) значениями ![]() и
и ![]() показало, что отклонения от заданных не превышают пяти процентов, что позволяет их использовать в процедуре получения азимутального портрета (21) и (22).
показало, что отклонения от заданных не превышают пяти процентов, что позволяет их использовать в процедуре получения азимутального портрета (21) и (22).
На рис. 8 показан азимутальный портрет рассматриваемой модели. Хорошо видны выделенные сигналы от локальных центров рассеяния, из этого можно сделать вывод о корректности применяемых соотношений.
|
Рис. 8. Азимутальный портрет цели. |

Таким образом, по результатам проведенного математического моделирования можно сделать вывод о том, что при построении радиолокационного изображения целей в алгоритмах компенсации движения с точки зрения помехоустойчивости целесообразно использовать метод преобразования Радона для выравнивания по дальности и метод минимума энтропии для фазовой настройки
Список использованный источников:
1. Пасмуров А.Я. Получение радиолокационных изображений летательных аппаратов // Радиотехника и электроника. 1987. Т. 32, №12. С. 3–30.
2. Вопросы перспективной радиолокации. Коллективная монография / Под ред. А.В. Соколова // Перспективы повышения эффективности метровых РЛС при использовании длительного когерентного накопления (по результатам экспериментальных исследований) / С.И. Нефедов [и др.]. М.: Радиотехника, 2003. С. 49-63.
3. Martorella M., Berrizzi F., Haywood B. Contrast maximization based technique for 2-D ISAR aftofocusing / IEEE Radar, Sonar and Navigation. 2005. Vol. 152, №8. P. 253–262.
4. Mao Y., Wu Y., Chen Z. A new approach to motion Compensation for ISAR imaging // APMC ’92 Asia-Pacific: Proceedings of Microwave Conference.1992. Vol. 2. P. 703-706.
5. Орлов В.М., Шустиков В.Ю., Нефедов С.И. Моделирование инверсно синтезированных радиолокационных изображений движущихся объектов на основе фацетных моделей // Антенны. 2005. Вып. 10 (101). С. 69–75.
6. Методы компенсации движения в РЛС с инверсным синтезированием апертуры (ИСА) / В.М. Орлов [и др.] // Радиолокация, навигация, связь: Труды XVII международной научно-технической конф. Воронеж. 2011. Т. 3. C. 2331- 2342.
Публикации с ключевыми словами: РЛС, автофокусировка, дальностный портрет, радиоизображение, азимутальный портрет
Публикации со словами: РЛС, автофокусировка, дальностный портрет, радиоизображение, азимутальный портрет
Смотри также:
- 77-30569/251783 Алгоритм повышения контрастности радиоизображения на основе минимально-параметрического моделирования
- 77-30569/253104 Разработка алгоритма допоиска целей в РЛС радиовидения космических аппаратов миллиметрового диапазона
- 77-30569/250937 Особенности информационного обеспечения радиолокационных систем слежения за космическими объектами
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||