научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 11, ноябрь 2011
УДК 681.5.01: 621.9
МГТУ им. Н.Э. Баумана
В настоящее время в станкостроении России происходит важнейший поворот от традиционного процесса создания станка к высокопроизводительному конструированию его узлов на основе широчайшего применения программного обеспечения с помощъю ЭВМ.
Совершенствование систем ЧПУ станками заставляет преподавателей ВУЗ ов и студентов старших курсов пересматривать статические и динамические условия работы основных, важнейших систем станка.
При проработке студентами в МГТУ им. Н.Э. Баумана систем управления техническими средствами станков и роботов в современных, крайне неблагоприятных для отечественного станкостроения условиях, характерно:
- слабое знание студентами - дипломниками динамических процессов, проходящих в станке при возмущающих воздействиях;
- отсутствие опыта математического моделирования выбранного варианта проектируемого станка;
- недостаточное знание переходных процессов в автоматизируемом станке, неудовлетворительное понимание разомкнутых и замкнутых систем автоматического регулирования в станочных системах;
- слабое знание студентами - дипломниками, операционного исчисления, как мощного средства описания инерционных процессов в станке;
- отсутствие единой иерархической системы рассмотрения динамических процессов в станке ;
- отсутствие у студентов расчетных динамических погрешностей при обработке на станке с ЧПУ сложных поверхностей и предварительного расчета точности их обработки;
К сожалению, в настоящее время стратегией в станочном комплексе РФ является стратегия выживания, происходящая в условиях неопределенности и неясности перспектив понимания студентами современной науки о станках и практики станкостроения.
Для решения комплекса этих проблем управления техническими системами станков, в МГТУ им. Н.Э. Баумана создана дисциплина, которая наряду со статическими условиями, предполагает рассмотрение сложных, динамических, многоконтурных систем автоматического управления узлами станка, содержащими электронные, гидравлические и механические блоки, системы и передачи [ 1 ].
Основное внимание при создании разделов этой дисциплины уделил д.т.н., профессор кафедры “ Металлорежущие станки” Г.Н. Васильев. Под его руководством была создана иерархическая система рассмотрения курса, разработаны планы семинарских занятий и часть лабораторных работ. Было решено, что часть первоначальных лекций будет прочитана студентам 4 курса кафедрой факультета “Информатика и управление”. Однако, в связи с особенностью динамических процессов в станкостроении, более углубленное представление о них, о взаимосвязях теории автоматического управления приводами станков, необходимо давать на старших курсах. Необходимость в этом продиктована также значительным применением вычислительной техники в станкостроении.
Иерархическая система курса “ Управление в технических процессах металлорежущих станков и промышленных работов” (УТСМС и ПР ) представляет из себя “подчиненную” первоначально рассматриваемому, исполнительному рабочему органу станка с ЧПУ, структуру ( Рис 1 ).

Рис. 1. Иерархическая система курса УТС МС и ПР.
Рассмотрим пример к методике преподавания курса УТС МС и ПР для студентов ( магистров ) старших курсов при изучении ими исполнительного органа станка с ЧПУ. Подобные задачи применяются нами при освоении студентами всех последующих разделов иерархической системы преподавания курса.
К настоящему времени и сами исполнительные органы МС и ПР и их математическое описание существенно усложнились из за появления новых приводных двигателей, новых частотных преобразователей, создания приводов с повышенными динамическими требованиями. С применением новых двигателей в практику управления прочно вошли понятия устойчивости приводов МС и ПР, управляемости приводов, динамическое описание электро ( и гидро) двигателей, понятия о сельсинах, вращающихся трансформаторах, специальных синхронных электродвигателях и т.д. Существенное обновление к настоящему времени расчетного инструментария для описания динамики станочного двигателя потребовало адекватного отображения его в учебном процессе и программном продукте. На сегодняшний день набором инструментальных средств ( SIMULINK, POWERSYSTEMBLOCKSETи др. ) Большинство методов, излагаемых в учебных курсах по теории автоматического управления, оформлены в этой среде.
После изложения студентам и последующей проработке ими обобщенной схемы следящих приводов МС и ПР с ЧПУ [ 1 ], следует построить структурную модель этих приводов в виде обобщенной структурной схемы.
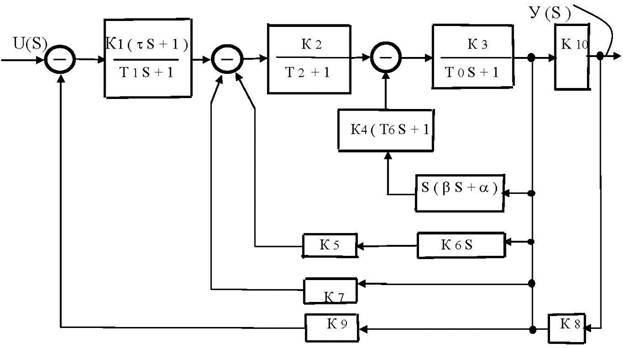
Рис 2. Обобщенная структурная схема следящего привода МС и ПР.
В качестве примера студентам можно предложить задать структурные коэффициенты К 5 К 7 К 8 и К 9, которые определяют наличие или отсутствие соответствующих обратных связей, причем коэффициент К 4 следует отыскать. Коэффициент К 8 задает место установки датчика перемещения стола ( или руки ). Если он установлен на валу двигателя или на винте шариковой винтовой пары, то К 8 = 0. Если датчик перемещения установлен на рабочем органе, то К 8 = 1. Коэффициент b задает инерционную нагрузку на привод, коэффициент a определяет скоростное трение.
Коэффициент К 4 пропорционален жесткости механической характеристики исполнительного двигателя и слушателям курса его необходимо отыскать, задавшись разомкнутой и замкнутой по скорости схемой привода МС и ПР и электродвигателем постоянного тока (ДПТ ).
Следует особо выделить динамические свойства двигателей, как единственных из устройств, преобразующих энергию из одного вида в другой.
Передаточная функция силового элемента МС и ПР – гидроцилиндра.
Преобразовав по Лапласу при нулевых начальных условиях уравнение движения линейной модели гидроцилиндра, получаем передаточную функцию гидроцилиндра по перемещению штока:

где К n ц - коэффициент усиления гидроцилиндра по скорости
Т - постоянная времени гидроцилиндра
|
x - относительный коэффициент демпфирования.
Следует рассказать студентам о резонансной частоте, утечках, энергетических показателях гидроцилиндров. Применение коэффициента усиления гидроцилиндра по скорости К n ц для нахождения К 4 студентам затруднительно.
Передаточная функция гидромотора.
Роль гидромотора при создании МС или ПР чрезвычайно велика [ 2 ].
Гидромоторы могут применяться в поворотных узлах ПР, приводе ходовых винтов тяжелых станков, перемещении крупногабаритных деталей и т.д. При использовании гидромоторов в следящих приводах МС с ЧПУ необходимо помнить, что гидромотор имеет 2 важнейших характеристики - скоростную и нагрузочную. На лекции приводятся понятия о коэффициенте усиления гидромотора по скорости Кд и по моменту К м . Напомнив студентам о понятии “ передаточная функция гидромотора W д ( S )” следует вывести ее:

где j( S ) - изображение угла поворота ротора гидромотора
Qд ( S ) – преобразованное по Лапласу расходу масла на входе в гидромотор.
T мех – механическая постоянная времени гидромотора, пропорциональная приведенному моменту инерции вращающихся частей и коэффициенту эластичности нагрузочной характеристики гидромотора.
Следует сказать, что T мех , применяемые в станках и роботах малы, что указывает на высокое быстродействие гидромоторов.
Коэффициент усиления гидромотора по скорости К д не дает ( без экспериментальных исследованиях ) данных о нахождении К 4.
Передаточная функция электродвигателя постоянного тока( ДПТ).
Необходимо подчеркнуть, что ДПТ очень широко применяются при создании ПР ( двигатели с плоским якорем ДЯ – 250 в ПР ТYP – 10, электродвигатели в ПР модели М40. П. 05. 02 и т.д. ). Специальные ДПТ с независимым возбуждением применяют и в приводах подач МС с ЧПУ.
Передаточная функция разомкнутого ДПТ представляет собой интегро - апериодическое звено:

где Т м - электромеханическая постоянная времени электродвигателя.
Как видно из Рис 3, коэффициент К 4 , пропорциональный жесткости механической характеристики ДПТ, может быть просто определен по данным каталога, однако для замкнутой системы станка с ЧПУ его определение должно выполняться иначе.
Для разомкнутой системы регулирования он будет определяться уравнением :
![]()
где К1 - коэффициент передачи ДПТ; ![]() при М = соnst
при М = соnst
К 4 - жесткость механической характеристики электродвигателя, равная tga.

Рис. 3. Погрешность регулирования частоты вращения шпинделя с разомкнутой и замкнутой системой регулирования.
Если напряжение на якоре U я = const, то изменение частоты вращения выходного вала ДПТ произойдет при изменении момента нагрузки М от М 1 до М 2.
Иное происходит когда система привода МС или ПР замкнута, т.е. когда заданное напряжение U, сравнивается с напряжением тахогенератора U тг и пройдя через тиристорный преобразователь ТП, поступает на ДПТ.

Рис 4. Пример замкнутой системы управления для отыскания коэффициента К 4.
Замкнутый привод можно описать следующими уравнениями:

где К тг, К у, К тп - соответственно коэффициенты передачи тахогенератора ТГ, усилителя постоянного тока УПТ и тиристорного преобразователя ТП. Тогда, погрешность регулирования частоты вращения этого привода будет определяться уравнением:
![]()
В случае замкнутого по частоте вращения привода, можно подбирая величину коэффициента передачи К п = К тг К у К тп К 1 теоретически обеспечить любую точность регулирования. На лекции необходимо подчеркнуть, что получить практически максимальной величину коэффициента передачи всего контура К п невозможно, т.к. будут сказываться нелинейности элементов привода. Таким образом, введение отрицательной обратной связи по частоте вращения шпинделя позволяет уменьшить влияние как внешних, так и внутренних возмущений. Зная, что значение коэффициента К п ограничено только динамическими параметрами системы регулирования ( потеря устойчивости вследствие нелинейностей элементов), при расчетах следует это обстоятельство обязательно учитывать.
Из последнего уравнения ( предварительно задавшись всеми коэффициентами усиления и получив механическую характеристику замкнутого привода МС или ПР ) можно получить коэффициент К 4 , который характеризует жесткость механической характеристики ДПТ.
Исходя из частично рассмотренной методики преподавания курса УТС МС и ПР, разобранного на семинарских занятиях примера отыскания коэффициентов заставляющего студентов думать, можно сделать вывод о том, что этот курс является творческим, насыщенным, требующим знаний в теории управления станками и промышленными роботами. Сведения об устройствах, используемых в автоматическом управлении динамикой станка, студенты получают из различных курсов ( ТАУ, вычислительная техника, управление в системах и т.д. ). Однако, динамику процессов в приводах станков и роботов, построение ЛАЧХ замкнутых и разомкнутых систем, вычисление динамических погрешностей при обработке реальных деталей можно освоить только изучив данный курс.
Иерархия систем управления приводами станка с динамическими линейными уравнениями специальных исполнительных электродвигателей, знание типовых звеньев САР станка и ПР, умение отыскать и построить корректирующие звенья системы, построение и обоснование логарифмических амплитудно – частотных и фазовых характеристик приводов, умение назначать запасы по амплитуде и фазе для обеспечения устойчивости системы станка с ЧПУ, все это позволяет после освоения курса УТС МС и ПР , осуществить четкое взаимодействие между станочной исполнительной системой и системой всего завода, фирмы, цеха.
Список литературы
1. Васильев Г.Н. Автоматизация проектирования металлорежущих станков – М.: Машиностроение. 1987. – 280 с., ил.
2. Лещенко В.А. Гидравлические следящие приводы станков с программным управлением. – М. : Машиностроение, 1975. - 280 с., ил.
Публикации с ключевыми словами: преподавание, ЧПУ, управление техническими системами, примеры
Публикации со словами: преподавание, ЧПУ, управление техническими системами, примеры
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||