научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 11, ноябрь 2011
УДК 621.396.96
НИИ РЭТ МГТУ им. Н.Э. Баумана
В последние годы при разработке современных средств противовоздушной и противоракетной обороны резко возрос интерес к многопозиционным радиолокационным системам (МП РЛС). Это обусловлено тем, что наряду с их известными достоинствами, такими как повышенная энергетика, улучшенная разрешающая способность по угловым координатам и др. [1], в литературе все чаще отмечают существенный выигрыш в живучести многопозиционных систем по сравнению с однопозиционными при их работе в боевых условиях [2].
Для отработки достаточно сложных алгоритмов обработки радиолокационной информации в МП РЛС разработчики используют математические модели. При этом возникает задача формирования входных данных для этих моделей, представляющих собой эхо-сигналы на входе всех приемных модулей МП РЛС.
Целью данной работы является разработка модели канала распространения многопозиционной радиолокационной системы, позволяющей сформировать исходные данные для моделей обработки радиолокационной информации в МП РЛС.
Пусть в некоторой области пространства находятся исследуемая многопозиционная радиолокационная система, цели (например, летательные аппараты), средства радиоэлектронной борьбы и другие объекты. В этом случае задача моделирования полезного сигнала заключается в формировании радиосигналов на входе всех приемных систем из зондирующих радиосигналов всех передающих систем с учетом их распространения на трассе, рассеяния на различных препятствиях, таких как цели и пассивные помехи, и отражения от подстилающей поверхности [3].
Удобнее всего решать подобную задачу в общем матричном виде для системы, состоящей из ![]() передающих и
передающих и ![]() приемных модулей. В частом случае модули могут быть приемопередающими, т.е. координаты некоторых передатчиков совпадают с координатами некоторых приемников.
приемных модулей. В частом случае модули могут быть приемопередающими, т.е. координаты некоторых передатчиков совпадают с координатами некоторых приемников.
Таким образом, формируется линейная система с ![]() входами и
входами и ![]() выходами, прохождение сигналов через которую можно описать матрицей передаточных характеристик размером
выходами, прохождение сигналов через которую можно описать матрицей передаточных характеристик размером ![]()
![]() . При этом вектор выходных сигналов S(t) описывается сверткой во временной области вектора входных (излучаемых) сигналов X(t) и матрицы передачи
. При этом вектор выходных сигналов S(t) описывается сверткой во временной области вектора входных (излучаемых) сигналов X(t) и матрицы передачи ![]() .
.
| (1) |
 ,
,где ![]() - максимальная длительность передаточных характеристик.
- максимальная длительность передаточных характеристик.
Будем считать, что входными сигналами системы являются отсчеты с выхода зондирующего генератора, взятые с некоторым шагом моделирования ![]() . А расчет откликов на входе приемных модулей будет происходить с шагом, удовлетворяющим критерию Котельникова для ширины полосы моделирования. Под шириной полосы моделирования понимается полоса, объединяющая все полосы, занимаемые излучаемыми радиосигналами.
. А расчет откликов на входе приемных модулей будет происходить с шагом, удовлетворяющим критерию Котельникова для ширины полосы моделирования. Под шириной полосы моделирования понимается полоса, объединяющая все полосы, занимаемые излучаемыми радиосигналами.
В работе также считается, что все характеристики объектов канала распространения, такие как угловые диаграммы рассеяния целей, пространственные диаграммы направленности антенн передающих и приемных модулей, траектории движения всех перемещающихся объектов и т.д., известны и доступны в табличном виде.
В дискретном виде матрица передаточных характеристик рассчитывается с помощью следующего выражения
| (2) |
где ![]() – индекс приемных модулей;
– индекс приемных модулей;
![]() – индекс передающих модулей;
– индекс передающих модулей;
![]() – индекс трасс распространения, учитываемых при моделировании;
– индекс трасс распространения, учитываемых при моделировании;
| (3) |
 ,
,![]() - коэффициент усиления передающей антенны m-го передатчика,
- коэффициент усиления передающей антенны m-го передатчика,
![]() - нормированная диаграмма направленности передающей антенны m-го передатчика;
- нормированная диаграмма направленности передающей антенны m-го передатчика;
![]() - ширина спектра зондирующего сигнала m-го передающего модуля;
- ширина спектра зондирующего сигнала m-го передающего модуля;
![]() - коэффициент усиления приемной антенны n-го приемника;
- коэффициент усиления приемной антенны n-го приемника;
![]() - потери, обусловленные распространением сигнала в атмосфере;
- потери, обусловленные распространением сигнала в атмосфере;
![]() - нормированная диаграмма направленности приемной антенны n-го приемника;
- нормированная диаграмма направленности приемной антенны n-го приемника;
![]() - центральная частота полосы пропускания n-го приемного модуля,
- центральная частота полосы пропускания n-го приемного модуля,
![]() - матрица коэффициентов распространения радиосигналов от m-го передатчика к входу n-го приемника.
- матрица коэффициентов распространения радиосигналов от m-го передатчика к входу n-го приемника.
При формировании матрицы коэффициентов распространения необходимо учитывать следующие виды трасс:
1) Прямое попадание радиосигнала передатчика на вход приемника. При этом
| (4) |
 ,
,где ![]() - расстояние между двумя объектами (в данном случае между передатчиком и приемником),
- расстояние между двумя объектами (в данном случае между передатчиком и приемником),
| (5) |
где ![]() - координаты m-го передающего модуля в текущий момент времени
- координаты m-го передающего модуля в текущий момент времени ![]() ,
,
![]() - координаты n-го приемного модуля в текущий момент времени
- координаты n-го приемного модуля в текущий момент времени ![]() ,
,
PRD – объект типа передатчик,
PRM – объект типа приемник,
![]() - постоянная распространения радиосигнала m-го передатчика.
- постоянная распространения радиосигнала m-го передатчика.
2) Однократное отражение радиосигнала от объекта (цели)
| (6) |
 ,
,где ![]() - индекс для целей,
- индекс для целей,
![]() – число целей,
– число целей,
![]() - расстояние между передатчиком и i-й целью (определяется аналогично выражению (5)),
- расстояние между передатчиком и i-й целью (определяется аналогично выражению (5)),
![]() - расстояние между i-й целью и приемником,
- расстояние между i-й целью и приемником,
![]() - значение ЭПР цели в зависимости от угла облучения
- значение ЭПР цели в зависимости от угла облучения ![]() .
.
3) Рассеяние радиосигнала подстилающей поверхностью
Рассеянный подстилающей поверхностью сигнал передатчика может оказывать существенное влияние на отклик, формируемый на входе приемного модуля. Для его расчета необходимо просуммировать сигнал, отраженный от каждого элементарного участка поверхности. В качестве элементарных участков могут выступать прямоугольный или треугольный фацет и ребро, что сразу же усложняет задачу с точки зрения требуемого объема вычислительных затрат. В данной работе в качестве модели подстилающей поверхности предлагается использовать совокупность множественных точечных отражателей, случайным образом распределенных по поверхности. Для учета механизма отражения, близкого к зеркальному, необходимо размещать отражатели на разных высотах. Наиболее распространенным законом распределения отражателей по высоте является нормальное распределение с нулевым математическим ожиданием и дисперсией, соответствующей стандартному отклонению высот поверхности ![]()
|
|
 .
.Будем считать, что фаза элементарных отражателей распределена по равномерному закону на интервале ![]() , а ЭПР – по закону Релея
, а ЭПР – по закону Релея
|
|
 ,
,где ![]() ,
, ![]() - удельная ЭПР подстилающей поверхности,
- удельная ЭПР подстилающей поверхности, ![]() - плотность точечных отражателей.
- плотность точечных отражателей.
Варьируя плотностью распределения отражателей, можно усложнять или упрощать модель в зависимости от необходимости получения достаточной точности или быстроты вычисления. А, изменяя закон распределения отражателей по высоте или его параметры, можно формировать модели, соответствующие различным типам подстилающих поверхностей.
ЭПР подстилающей поверхности сильно зависит от ее параметров и длины волны радиосигнала. Поскольку в справочной литературе приводится ограниченное количество экспериментальных зависимостей удельной ЭПР от угла скольжения (преимущественно в сантиметровом диапазоне), то целесообразней воспользоваться теоретическими формулами для нахождения ЭПР различных видов поверхности [4]. Основная сложность будет состоять в том, что описать реальную земную поверхность с высокой степенью достоверности не представляется возможным. Тем не менее, такой подход даст ориентировочные зависимости для всех диапазонов длин волн.
Тогда коэффициент распространения радиосигнала будет определяться как
| (7) |
 ,
,где ![]() – число рассеивателей на заданном участке поверхности,
– число рассеивателей на заданном участке поверхности,
![]() - расстояние между передатчиком и i-м отражателем подстилающей поверхности,
- расстояние между передатчиком и i-м отражателем подстилающей поверхности,
![]() - расстояние между i-м отражателем подстилающей поверхности и приемником,
- расстояние между i-м отражателем подстилающей поверхности и приемником,
![]() - значение ЭПР i-го отражателя при его облучении под углом
- значение ЭПР i-го отражателя при его облучении под углом ![]() и приеме сигнала под углом
и приеме сигнала под углом ![]() .
.
|
|
где ![]() - значение моностатической ЭПР в зависимости от угла облучения.
- значение моностатической ЭПР в зависимости от угла облучения.
4) Переотражение радиосигнала сначала от подстилающей поверхности, а затем от цели
| (8) |
 ,
,где ![]() - коэффициент отражения от подстилающей поверхности.
- коэффициент отражения от подстилающей поверхности.
5) Переотражение радиосигнала сначала от цели, а затем от подстилающей поверхности
| (9) |
 .
.Легко показать, что остальные трассы распространения не внесут существенного вклада в отраженный сигнал, поэтому ими можно пренебречь.
Общее число трасс распространения для каждого n-го приемного и m–го передающего модуля определяется как
| (10) |
Таким образом, с учетом комбинаций всех приемных модулей, трасс распространения, передающих модулей и целей получается трехмерная матрица коэффициентов распространения![]() , где N – общее число приемных модулей, М – общее число передающих модулей, К – общее число трасс.
, где N – общее число приемных модулей, М – общее число передающих модулей, К – общее число трасс.
Общее число трасс K может быть снижено, если учитывать при суммировании динамический диапазон приемника, который позволит исключить из рассмотрения слишком мощные (например, прямое попадание) и слишком слабые компоненты суммарного принимаемого сигнала.
С учетом всего вышеизложенного, окончательное выражение для отсчетов радиосигнала на входе n-го приемного модуля выглядит следующим образом
| (11) |
 ,
,где ![]() - момент времени, в который рассчитывается сигнал на входе приемника,
- момент времени, в который рассчитывается сигнал на входе приемника, ![]() - время моделирования.
- время моделирования.
Из выражения (11) видно, что для моделирования отсчетов радиосигналов на входе приемников в каждый момент времени ![]() необходимо знание зондирующих сигналов и координат объектов в каждый момент времени
необходимо знание зондирующих сигналов и координат объектов в каждый момент времени ![]() .
.
Для объектов, координаты которых за время, соответствующее задержки сигнала при его распространении по самой длинной трассе, меняются незначительно, можно использовать только координаты в момент времени ![]() . В рассматриваемом в работе случае в качестве объектов могут выступать летательные аппараты, в том числе и быстролетящие. Поэтому указанное упрощение может привести к большой погрешности в вычислениях.
. В рассматриваемом в работе случае в качестве объектов могут выступать летательные аппараты, в том числе и быстролетящие. Поэтому указанное упрощение может привести к большой погрешности в вычислениях.
Поэтому предлагается следующий алгоритм интерполяции траекторий:
- рассчитывается расстояние ![]() между передающим модулем и целью с координатами, соответствующими времени
между передающим модулем и целью с координатами, соответствующими времени ![]() ;
;
- оценивается время распространения сигнала от цели до передающего модуля ![]() ,
,
где с – скорость света;
- оценивается скорость цели
|
|
|
|
- вычисляется поправочное расстояние ![]()
|
|
- рассчитываются интерполированные координаты цели
|
|
Что касается знания зондирующих сигналов в моменты времени, не кратные времени дискретизации, то здесь необходимо применять алгоритмы восстановления сигнала. Выбор этого алгоритма представляет собой компромисс между точностью восстановления и быстродействием.
Для иллюстрации работы разработанной математической модели была рассмотрена многопозиционная система метрового диапазона длин волн. Подстилающая поверхность имела удельную ЭПР 9 10-4 и представляла собой точечную модель. Амплитуда зондирующих сигналов передатчиков была равна 1 мВ.
Для исследования подстилающей поверхности приемный и передающий модуль МП РЛС был совмещен в одной точке и поднят над Землей на 100 м. Область размещения отражателей в модели подстилающей поверхности была взята 2х2 км. На рис. 1 представлены результаты моделирования огибающей импульсной характеристики канала распространения а) при отсутствии в нем целей; б) при наличии одной точечной цели с единичной ЭПР, расположенной на расстоянии 360 м от приемопередающего модуля. На рис. 1б четко прослеживается отклик от этой цели в момент времени 2,4 мкс, что как раз соответствует времени задержки сигнала при его распространении на дальность 360 м.
|
|
а) | б) |
Рис. 1. Огибающая импульсной характеристики канала распространения а) при отсутствии в нем целей и б) при наличии одной точечной цели | |
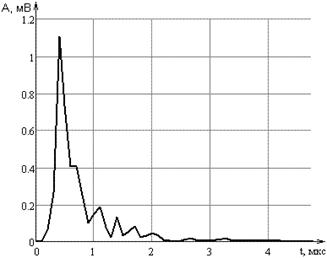

Для исследования математической модели целиком и получения полезного сигнала на входе приемного модуля была рассмотрена следующая ситуация. МП РЛС состоит из одного приемного и шести передающих модулей (рис. 2). В области моделирования присутствует три точечные цели с ЭПР 0,5, 0,8 и 1 м2 на расстоянии около 4, 6 и 10 км от приемного модуля соответственно. Область размещения точечных отражателей подстилающей поверхности составляет 10х10 км. Рабочая частота передатчиков равняется 150; 150,2; 150,4; 150,6; 150,8 и 151 МГц, длительность импульсов передатчика – 5 мкс, амплитуда – 1 мВ.
Рис. 2. Конфигурация МП РЛС
Разработанная математическая модель канала распространения является универсальным инструментом для формирования сигналов на входе приемных модулей МП РЛС. Точность получения результатов в ней зависит от
- плотности распределения отражателей в модели подстилающей поверхности;
- применяемого алгоритма восстановления зондирующих сигналов;
- шага по углу при задании угловых диаграмм рассеяния реальных целей и диаграмм направленности антенн приемных и передающих модулей;
- степени детализации моделей реальных целей, для которых проводился расчет угловых диаграмм рассеяния;
- шага по времени при задании траекторий движения перемещающихся объектов.

Рис. 3. Огибающая сигнала на входе приемного модуля
Исследование предлагаемой математической модели показало, что ее быстродействие определяется, преимущественно, временем расчета сигнала, рассеянного подстилающей поверхностью. Время на проведение моделирования канала распространения МП РЛС, состоящей из нескольких приемных и передающих модулей, будет составлять несколько часов, а, в худшем случае, может оказаться неприемлемым. Поэтому основной задачей становится сокращение времени расчета, например, путем распараллеливания процессов и использования современных вычислительных средств типа CUDA компании NVidia.
Список использованных источников:
1. Черняк В.С. Многопозиционная радиолокация. М.: Радио и связь, 1993. 416 с.
2. Исследование методов повышения живучести РЛС в условиях радиоэлектронного подавления и огневого поражения / С.И. Нефедов [и др.] // Радиолокация, навигация, связь: Труды XVI международной научно-технической конф. Воронеж. 2010. Т. 3. С. 1711-1717.
3. Нефедова Ю.С., Каранкевич А.А. Разработка модели канала распространения многопозиционной радиолокационной системы // Радиолокация, навигация, связь: Труды XVI международной научно-технической конф. Воронеж. 2010. Т. 3. С. 1812-1819.
4. Справочник по радиолокации. Т.1. Основы радиолокации / Под ред. М. Сколника; Пер. с англ. под общ. ред. К.Н. Трофимова. М.: Сов. радио. 1976. 456 с.
Публикации с ключевыми словами: математическая модель, многопозиционная РЛС, канал распространения, импульсная характеристика
Публикации со словами: математическая модель, многопозиционная РЛС, канал распространения, импульсная характеристика
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||