научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 11, ноябрь 2011
УДК 621.396.962.38
НИИ РЭТ МГТУ им. Н.Э. Баумана
В последнее время огромное внимание уделяется получению высококачественных радиоизображений. Основным способом их получения является инверсный синтез апертуры (ИСА). Одним из необходимых условий для получения изображения является необходимость высокой разрешающей способности по дальности, которая достигается применением широкополосных сигналов. Однако использование таких сигналов накладывает ряд существенных требований к приемо-передающему тракту РЛС. Помимо этого необходимо использовать высокопроизводительные АЦП и мощные средства первичной обработки радиолокационных данных.
Альтернативным решением данной проблемы является синтез полосы [2, 4]. Иными словами РЛС излучает узкополосный сигнал, при этом несущая частота меняется от импульса к импульсу. В литературе такой сигнал может называться как разомкнутый частотно-манипулированный (slowsteppedfrequency), либо сигнал с синтезом спектра.
В этом случае для оцифровки достаточно узкополосного АЦП, а первичная обработка потребует значительно меньшего числа вычислений. Платой за это преимущество является то, что такие сигналы могут быть протяженными во времени, что как минимум потребует учета доплеровского смещения частоты при обработке, либо компенсации движения на основе более сложной модели изменения частоты.

Рис.1. Структурная схема РЛС с синтезом полосы
Структурная схема такой радиолокационной станции показана на рисунке 1. Важной особенностью является то, что несущая частота передатчика меняется синхронно с частотой гетеродина приемника. Таким образом, промежуточная частота остается постоянной, что позволяет использовать АЦП с частотой дискретизации меньшей, чем синтезированная полоса сигнала.
Необходимо отметить, что алгоритм получения радиоизображения при помощи ИСА требует знания параметров движения цели. По этой причине вполне допустимо использование такого сигнала, где для получения разрешения по дальности также требуется информация о движении.
Структура разомкнутого частотно-манипулированного сигнала показана на рисунке 2. Для определенности в качестве зондирующего импульса можно взять ЛЧМ сигнал, а несущую частоту менять по линейному закону.

Рис.2. Структура сигнала
Разрешающая способность по дальности, которая будет достигаться при использовании такого сигнала определяется как:
| (1) |
где: с – скорость света; ∆f – девиация частоты перестройки (синтезируемая полоса). | |

Важной особенностью, которую необходимо учитывать при обработке сигнала с синтезом спектра, является зависимость фазы сигнала на i-м такте, отраженного от блестящей точки, от дальности, что обусловлено изменением частоты зондирующего сигнала.
| (2) |
где: fi – несущая частота РЛС на i-м такте работы; t – время запаздывания. | |
Таким образом, для обработки сигнала необходимо формировать фазовые сдвиги для каждого элемента разрешения по дальности. Соответственно дальностный портрет неподвижной цели можно получить за счет использования преобразования Фурье в пределах периода изменения несущей частоты.
Важной характеристикой сигнала, которая показывает свойства по разрешающей способности, а также структуру побочных составляющих, является тело неопределенности. Тело неопределенности по своей сути есть величина отклика алгоритма обработки, настроенного на параметры, рассогласованные с параметрами сигнала. Структура ближайших боковых лепестков тела неопределенности при накоплении пачки импульсов с синтезом спектра показана на рисунке 3.
Из рисунка 3 видно, что боковые составляющие тела неопределенности, имеющие периодическую структуру, сопоставимы по амплитуде с основным пиком, что, безусловно, является недостатком.

Рис.3. Структура боковых лепестков тела неопределенности
Алгоритм обработки сигнала с синтезом спектра (при том условии, что доплеровское смещение много меньше девиации ЛЧМ сигнала) заключается в корректной компенсации фазового набега, который обусловлен как изменением частоты зондирующего сигнала, так и доплеровским сдвигом частоты. Причем для повышения энергетического потенциала и увеличения разрешающей способности по частоте количество накапливаемых импульсов может значительно больше, чем в периоде изменения несущей частоты Т0.
В этом случае структура сигнала, отраженного от точечной цели, будет иметь вид:
| (3) |
где: А – амплитуда сигнала; UЛЧМ(t) – комплексная огибающая ЛЧМ импульса; i – номер такта (импульса); t – текущее время; tз – время запаздывания; Ф1, Ф2, Ф3 – набеги фаз. | |
В формуле (3) в аргументе экспоненты первое слагаемое обусловлено доплеровским смещением частоты, которое влияет на искажение фазы ЛЧМ сигнала в течение его длительности, второе слагаемое определяет фазу, набегающую из-за времени запаздывания, третье слагаемое – набег фазы от импульса к импульсу в результате доплеровского смещения частоты.
Ф1 в формуле 3 приводит только к ошибке по дальности, которая будет для всех частот примерно одинаковой.За счет компенсации Ф2 и Ф3, и последующего когерентного накопления импульсов происходит формирование дальностного портрета. По этим причинам алгоритм обработки сигнала будет следующим:
- Так как происходит формирование дальностного портрета, то необходимо выбирать предполагаемое время запаздывания как можно чаще: новая частота дискретизации должна быть достаточна для оцифровки синтезированной полосы сигнала.
- На каждом такте новой частоты дискретизации необходимо выполнить свертку ЛЧМ сигнала.
- Вычислить время запаздывания, которое соответствует такту новой частоты дискретизации, определить набег фазы по формуле 2 и произвести компенсацию фазы.
- Выполнить когерентное суммирование импульсов с учетом доплеровского смещения частоты (данная операция может быть выполнена при помощи БПФ) [1].
Алгоритм обработки сигнала приведен на рисунке 4.
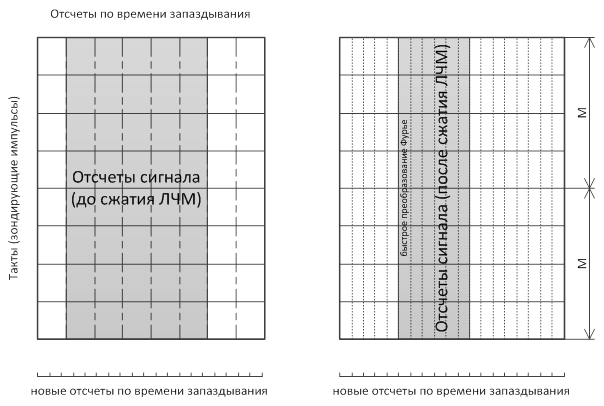
Рис.4. Алгоритм обработки сигнала
Приведенный на рисунке 4 алгоритм требует больших вычислительных затрат, более того, для получения сфокусированного дальностного портрета необходимо произвести компенсацию движения цели. По этой причине справедливо поставить задачу поиска упрощенного алгоритма, который позволял бы с минимальным использованием вычислительных затрат обнаружить отметку от цели и произвести оценку параметров её движения.
Предложить такой алгоритм несложно. Он будет включать в себя сжатие ЛЧМ импульсов и их последующее когерентное накопление в каждом канале дальности посредством БПФ. Не трудно показать, что если выполнить БПФ от импульсов на длительности Т0, то результатом будет дальностный портрет.
Недостатком такого подхода будет наличие существенных боковых лепестков по частоте, которые будут обусловлены особенностями спектра периодического сигнала: преобразование Фурье на более длительном интервале даст линейчатый спектр, огибающей которого будет дальностный портрет. Структура отражений при таком подходе показана на рисунке 5.
При построении рисунка 5 предполагается, что цель покоится, либо совершает поступательное движение к (от) РЛС со скоростью, которая вызывает доплеровский сдвиг частоты много меньше, чем девиация частоты ЛЧМ сигнала ∆F.
Следует отметить, что при работе алгоритма на основе БПФ неизбежно возникают боковые лепестки, компенсировать которые можно традиционным способом – используя весовые окна, что приводит к несколько худшей разрешающей способности. Применять весовое окно необходимо к каждой выборке длительностью T0 – для дальности, а для компенсации боковых лепестков по частоте – ко всей длительности выборки.

Рис.5. Результат работы быстрого алгоритма
Рисунок 5 показывает, что действительно: дальностный портрет можно получить довольно легко, однако если движение цели будет сложнее, чем поступательное к (от) РЛС, то показанные элементы разрешения по дальности будут размазываться по оси частот. Также следует обратить внимание, что элементы разрешения по дальности расположены со сдвигом относительно друг друга. Этот сдвиг обусловлен наклоном, который равен наклону линейной перестройки частоты от импульса к импульсу.
| (4) |
где: Df – диапазон перестройки частоты; Т0 – длительность периода перестройки частоты. | |

Если сигнал, отраженный от цели, имеет доплеровский сдвиг частоты, то элементы разрешения будут синхронно сдвинуты по оси частот. Этот факт дает возможность произвести идентификацию сигнала на наличие в нём изменения частоты от импульса к импульсу, а также произвести оценку параметров изменения. Соответственно на значение частоты элемента разрешения будет влиять как его дальность, так и его доплеровская частота. Важной особенностью такого подхода является то, что значения сетки частот, на которых расположены элементы разрешения по дальности, не зависят от дальности до отражающей точки, даже если цель совершает движение. Положение сетки частот зависит от частоты Доплера.
Если девиация перестройки частоты ∆f равна нулю, то элементы разрешения по дальности, разнесенные по частоте, вырождаются в один элемент, так как разнесения по частоте уже не будет.
В случае ИСА (когда перемещение цели будет компенсировано), за счёт поворота может оказаться так, что каждый элемент разрешения имеет собственную частоту, в этом случае расстояние по оси частот между ними может отличаться от 1/T0.
Измерение параметров движения осуществляется на основании оценок времени запаздывания, полученных на основе использования упрощенного алгоритма. В сантиметровом диапазоне длин волн достаточный интервал синтезирования составляет не более 0,5-1 секунды, за это время цель можно считать движущейся с постоянным радиальным ускорением. При необходимости можно использовать более сложную модель движения.
Оценку параметров изменения ракурса цели можно произвести на основании более длительного наблюдения за дальностью во время маневра.
Проверить реализацию режима инверсного синтеза апертуры можно при помощи моделирования сигнала. Параметры моделируемого сигнала и движения цели приведены в таблице 1. В качестве модели выбирается совокупность блестящих точек, совершающих движение по кругу с постоянными: скоростью, высотой и креном.
Таблица 1. Параметры для моделирования
п.п. | Наименование параметра | Обозначение | Значение |
Параметры сигнала | |||
1 | Средняя длина волны | λ | 3,2 см |
2 | Зондирующий импульс | U0(t) | ЛЧМ |
3 | Длительность импульса | t | 100 мкс |
4 | Девиация частоты ЛЧМ импульса | ΔF | 0,95 МГц |
5 | Частота следования импульсов | fП = 1/TП | 3 кГц |
6 | Частота дискретизации | fД | 2 МГц |
7 | Диапазон перестройки частоты | Δf | 14,4 МГц |
8 | Период перестройки частоты | М | 16 импульсов |
Параметры кругового движения цели | |||
9 | Радиус круга | R | 3 км |
10 | Дальность от РЛС до центра круга | D0 | 40 км |
11 | Высота | H | 10 км |
12 | Скорость цели | V | 150 м/с |
13 | Крен цели | β | 100 |
14 | Количество БТ цели | Nt | 8 |
Из таблицы 1 видно, что синтезируемая полоса цели намного превышает частоту дискретизации. Разрешающая способность по дальности, которая соответствует такой полосе, составляет 10,5 метров.
Для моделирования выбирается момент времени, когда цель создает доплеровский сдвиг частоты цели, близкий к максимальному. То есть, в этот момент можно считать радиальную скорость примерно постоянной.
Моделирование осуществляется следующим образом: задаётся структура цели в виде совокупности блестящих точек. Для каждой БТ вычисляется дальность и радиальная скорость относительно РЛС для всех моментов излучений зондирующих импульсов. Параметры отраженного сигнала вычисляются в соответствии с рисунком 6: задается некоторый момент времени t0, для которого нужно рассчитать сигнал. По определенным ранее дальности d0 и радиальной скорости Vr рассчитываютсяtз и Δt[1, 2]:
| (5) |
| (6) |

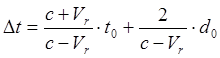
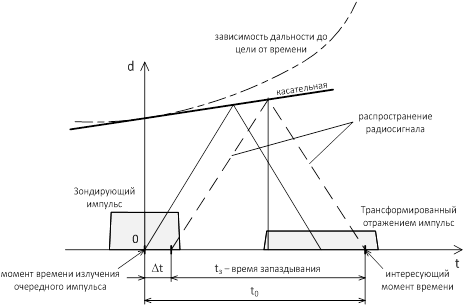
Рис.6. Моделирование отраженного сигнала
Отраженный сигнал на выходе АЦП (рисунок 1), который соответствует i-му зондирующему импульсу и интересующему моменту времени t0, вычисляется по формуле:
| (7) |
Для формул (5) – (7): d0 и Vr – дальность и радиальная скорость цели в момент излучения i-го зондирующего импульса; с – скорость света; t0 – интересующий момент времени, отсчитываемый от момента излучения i-го зондирующего импульса; ТП – период следования импульсов; Akи jk – амплитуда и фаза отражений от k-й блестящей точки; UЛЧМ – зависимость от времени комплексной огибающей зондирующего импульса; fi – несущая частота РЛС на i-м такте. | |
В результате моделирования формируется отраженный сигнал, производится его обработка быстрым алгоритмом, в результате которого формируются оценки зависимости дальности от времени, необходимые для компенсации движения. Затем выполняется инверсный синтез апертуры.
Следует отметить, если РЛС использует сигнал с линейной перестройкой частоты, то этот факт будет непосредственно проявляться, при рассмотрении совместно амплитуд нескольких несжатых ЛЧМ импульсов. Амплитуды будет модулированы линиями, идущими под углом. Это происходит оттого, что на этих линиях частота постоянна, рисунок 7.
Разрешающая способность, которая достигается по поперечной координате за счёт ИСА, определяется как [3]:
| (8) |
где ΔL – разрешающая способность по поперечной координате [м]; λ – длина волны [м]; Δφ – изменение ракурса цели [рад]. | |


Рис.7. Модуляция амплитуд
В случае, если необходимо получить разрешение за счёт ИСА порядка 1…2-х метров, несложно оценить, что для этого требуется изменение ракурса цели на угол примерно 0,92…0,46 градуса, что соответствует в данном случае когерентному накоплению 0,32…0,16 секунды для выбранных параметров движения. Соответственно для получения такого разрешения необходимо накопить порядка 960…480 импульсов. Для моделирования выберем случай накопления 768 импульсов, что соответствует разрешению по поперечной координате 1,25 метров.
Результаты моделирования радиоизображения цели показаны на рисунке 8. Для примера приведены изображения цели с компенсацией движения и без неё. Компенсация движения включает в себя устранение влияния перемещения цели, а также компенсацию набега фазы, вызванного в результате движения. При сравнении видно, что при отсутствии компенсации изображение получается довольно размытым, а при наличии компенсации, блестящие точки цели сфокусированы.

Рис.8. Изображения цели
На полученном радиоизображении цели четко видна неоднозначность измерения, как по частоте, так и по времени запаздывания, которая соответствует структуре боковых лепестков тела неопределенности. Поэтому для удовлетворительного качества получения изображений необходимо, чтобы габариты исследуемой цели укладывались с запасом в диапазон однозначного измерения времени запаздывания и доплеровской частоты.
На размер диапазона однозначности оказывают влияние следующие параметры сигнала: частота следования импульсов fП, размер синтезируемой полосы Δf и количество импульсов М в периоде изменения частоты.
Размер синтезируемой полосы определяет разрешение по дальности – параметр, задаваемый изначально, более того увеличение полосы уменьшает диапазон однозначности по дальности. Увеличение частоты следования импульсов напрямую увеличивает однозначность по частоте. Количество импульсов в периоде изменения частоты следует также увеличивать. Например, если требуется повысить однозначность по двум координатам в 2 раза, то М следует увеличить в 2 раза, а fП в 4 раза.
Выводы:
1. Сигналы с синтезом спектра позволяют эффективно решить задачу получения изображений радиолокационных целей при существенно ограниченной частоте дискретизации АЦП.
2. Для получения дальностного портрета цели необходимо применение более вычислительнозатратных алгоритмов по сравнению с алгоритмами обработки простых сигналов с полосой, аналогичной синтезированной, а также произвести компенсацию движения, которая также необходима для ИСА.
3. Оценить параметры движения цели можно на основании измерений дальности до цели, полученных на основе упрощенного алгоритма.
4. Использование данного типа сигнала приводит к существенному ограничению области однозначного измерения времени запаздывания и частоты.
5. Изменением таких параметров сигнала как М и fП можно добиться необходимых размеров зоны однозначности. Требования по размерам зоны однозначности определяются исходя из габаритов цели, которые зачастую не превосходят десятков метров.
Список используемых источников:
1. Информационные технологии в радиотехнических системах: Учебное пособие /В.А. Васин [и др.] / Под ред. И.Б. Федорова. – М.: Изд-во МГТУ им. Н.Э. Баумана, 2003. 672 с.: ил.
2. Радиоэлектронные системы: Основы построения и теория. Справочник./ Я.Д. Ширман [и др.] Изд. 2-е, перераб. и доп. / под редакцией Я.Д. Ширмана. – М.: Радиотехника, 2007. 512 с.: ил.
3. Victor C. Chen, Hao Ling Time-Frequency Transforms for Radar Imaging and Signal Analysis / Artech House Boston · London, 2002. 214 с.
4. Обнаружение и распознавание объектов радиолокации. Коллективная монография / Под редакцией А.В. Соколова. – М.: «Радиотехника», 2006. – 176 с.: ил. (Серия «Радиолокация»).
Публикации с ключевыми словами: синтез спектра, дальностный портрет, ИСА, ЛЧМ
Публикации со словами: синтез спектра, дальностный портрет, ИСА, ЛЧМ
Смотри также:
- 77-48211/654659 Методика моделирования двумерных радиолокационных изображений космических объектов при зондировании сигналами с синтезом спектра
- Перспективы применения вейвлет-преобразования для описания дальностных портретов в импульсной лазерной локации
- 77-30569/251783 Алгоритм повышения контрастности радиоизображения на основе минимально-параметрического моделирования
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||