научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 11, ноябрь 2011
DOI: 10.7463/1111.248778
УДК 681.2.088
МГТУ им. Н.Э.Баумана
Введение
Решение прямой задачи точности рычажных механизмов заключается в поиске первичных ошибок по заданным параметрам позиционирования исполнительных звеньев. Постановка прямой задачи иллюстрируется рис. 1, на котором показан принцип позиционирования шарнирного четырехзвенника в произвольном, i–ом положении.
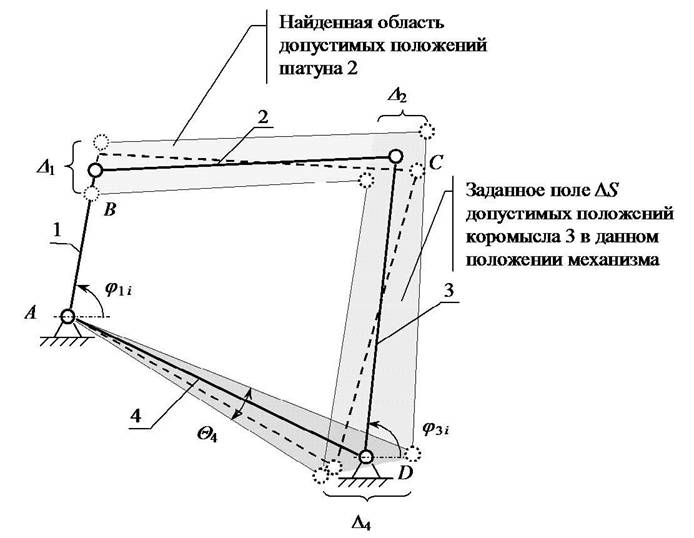
Рис. 1 Контуры реального и идеального механизма
_______ Контур идеального механизма
- - - - - - Возможное положение реального механизма
В этом случае, на основе заданного произвольного поля допустимых положений исполнительного звена (например, коромысла 3) ![]() требуется определить такие допуски на размеры элементов механизма
требуется определить такие допуски на размеры элементов механизма ![]() , при которых все звенья будут находиться в пределах областей, внешний вид которых определяется величинами полей допусков на размеры.
, при которых все звенья будут находиться в пределах областей, внешний вид которых определяется величинами полей допусков на размеры.
Авторами предложен матричный метод прямой задачи точности, в основу которого положен принцип разложения явно заданной вектор–функции ошибки механизма в ряд Маклорена с учетом членов, содержащим производные не выше второго порядка [1, 2]. В результате формируется линейная, относительно искомых отклонений, функция ошибки механизма, которая записывается в виде матрицы Якоби, и представляет собой систему линейных алгебраических уравнений (СЛАУ) с вещественными коэффициентами (1),
где A– матрица коэффициентов перед неизвестными параметрами; x– вектор неизвестных параметров, составленный из линейных и угловых возмущений звеньев ![]() , которые включают в себя погрешности от неточности изготовления, величины деформаций звеньев, зазоры в кинематических парах и возможную величину износа кинематических пар; b– вектор свободных членов. Вид вектора свободных членов определяется ограничениями, накладываемыми на функцию ошибки в положениях позиционирования [1–4].
, которые включают в себя погрешности от неточности изготовления, величины деформаций звеньев, зазоры в кинематических парах и возможную величину износа кинематических пар; b– вектор свободных членов. Вид вектора свободных членов определяется ограничениями, накладываемыми на функцию ошибки в положениях позиционирования [1–4].
Матричный метод прямой задачи точности плоских рычажных механизмов позволяет определять допустимые отклонения каждого размера. При этом учитывается податливость элементов механизма, величина зазоров в кинематических парах и возможный износ кинематических пар [1].
Авторами был выполнен расчет точности различных рычажных передаточных и направляющих механизмов технологических машин, в том числе многозвенных механизмов II и III класса. Анализ расчета допустимых отклонений показал, что для механизмов с одинаковыми функциональными возможностями и при одних и тех же условиях позиционирования допуски на размеры элементов механизмов высших классов более свободные, чем на размеры элементов механизмов низших классов [4].
При всем удобстве и простоте метода существуют некоторые особенности, которые привели к необходимости поиска нового метода ее решения.
Во-первых, особенностью решения прямой задачи точности по матричному методу является то, что для совокупности рассчитанных отклонений размеров могут существовать конфигурации механизма, при которых функция ошибки выходит за заданные пределы в положениях позиционирования. Решение задач для простейших четырехзвенных механизмов показало, что причиной этого могла стать плохая обусловленность первичной квадратной матрицы Якоби, в случае, когда нет необходимости приводить переопределенную СЛАУ к квадратному виду с применением процедур приведения плохо обусловленных систем к хорошо обусловленным СЛАУ.
Во-вторых, функция ошибки механизма не выходит за заданные пределы в положениях позиционирования только при строгом учете рассчитанного отклонения для каждого элемента механизма. Даже небольшое (порядка 1 – 4 %%) изменение одного или нескольких отклонений размеров может привести к тому, что функция ошибки выходит за заданные пределы. Очевидно, что такое решение не удовлетворяет конструкторов и технологов.
В-третьих. Так как в расчете за параметры позиционирования принимается только верхний предел области допустимого положения функции ошибки, то считалось, что допуски на размеры элементов механизма будут отнулевыми. Расчеты не подтвердили это предположение.
В-четвертых, характерной особенностью матричного метода является существование решения системы (1) даже при заведомо невероятных ограничениях на функцию ошибки механизма. Данное обстоятельство сужает возможности применения метода в задачах точности рычажных механизмов.
Постановка оптимизационной задачи точности
C учетом перечисленного правомочна следующая постановка прямой задачи точности: на основе заданных допустимых интервалов ![]() нахождения функции ошибки
нахождения функции ошибки ![]() в положениях позиционирования определить такие допуски на размеры элементов механизма
в положениях позиционирования определить такие допуски на размеры элементов механизма ![]() , чтобы при обеспечении любого размера в пределах найденного допуска функция ошибки находилась в заданных пределах т.е.
, чтобы при обеспечении любого размера в пределах найденного допуска функция ошибки находилась в заданных пределах т.е. ![]() (рис. 2).
(рис. 2).

Рис. 2 Постановка оптимизационной задачи точности рычажных механизмов
Описание оптимизационного метода прямой задачи точности
Правильность решения прямой задачи точности определяется условием устойчивого попадания функции ошибки механизма в заданные границы в положениях позиционирования при выполнении любого размера элемента механизма в допуск. В связи с этим, предлагаемый оптимизационный метод основан на решении задачи оптимизации при определении существования хотя бы единственного решения и, если такое решение имеется, в поиске пространства допусков, при которых функция ошибки всегда будет находиться в заданных пределах.
Предлагается трехэтапная последовательность решения прямой задачи:
(1) На основе заданных отклонений функции ошибки в положениях позиционирования определяется существование хотя бы единственного решения для искомых допусков. Если решение существует, то оно является отправным, базовым решением для выполнения второй стадии расчета. Если же решения не существует, то делается вывод о том, что ни при каких значениях отклонений искомых размеров функция ошибки не будет находиться в заданных пределах в положениях позиционирования механизма и расчет заканчивается. В этом случае, для поиска возможного решения необходимо изменить требования по позиционированию механизма или выбрать другой механизм, который реализует ту же самую функцию положения.
(2) Определяются непосредственно поля допусков на искомые размеры элементов механизма. В результате выявляется вид глобального n-мерного пространства допусков с устойчивым решением (n-число искомых параметров). Учет податливости звеньев механизма и возможного ресурса работы кинематических пар осуществляется составлением параметрических, дискретизирующих и функциональных ограничений, накладываемых на параметры объекта. Вид ограничений определяется требованиями рабочего процесса, особенностями конструкции, технологией изготовления машины.
(3) Рассчитываются оптимальные допуски на размеры элементов механизма с таким расчетом, чтобы они не выходили за пределы глобального пространства допусков. Алгоритм проведения третьего этапа определяется особенностями конструкции и технологией изготовления машины.
Выполнение первого этапа основано на решении задачи нелинейного программирования. Это связано с тем, что функция ошибки механизма нелинейная относительно искомых отклонений размеров. Сложная запись выражения для функции ошибки даже простейшего четырехзвенного механизма не позволяет применять методы оптимизации, использующие производные. В связи с этим, предложено применять оптимизационный метод без вычисления производных – метод прямого поиска [5].
Так как при формировании матрицы Якоби выражение для функции ошибки механизма приводится к линейному виду (1), то для ускорения решения возможно применение концепции последовательного линейного программирования [6].
В любом случае, независимыми переменными проектирования являются отклонения размеров элементов механизма ![]() , однозначно определяющие вид функции ошибки
, однозначно определяющие вид функции ошибки ![]() . Целевая функция
. Целевая функция ![]() составляется на основе анализа функции ошибки механизма в положениях позиционирования по следующей схеме (см. рис. 2):
составляется на основе анализа функции ошибки механизма в положениях позиционирования по следующей схеме (см. рис. 2):
 , (2)
, (2)
где n – число положений позиционирования;
Цель первого этапа – поиск таких отклонений размеров элементов механизма, при которых целевая функция принимает нулевые значения.
На втором этапе осуществляется обход глобального пространства допусков по методике расчета границ областей устойчивости [7]. Исходными данными для второй стадии расчета являются отклонения размеров элементов механизма вычисленные на первом этапе. Принятый метод обхода глобального пространства допусков обеспечивает определение границы при сложных формах области допусков, которая возникает из-за нелинейной зависимости ошибки положения от отклонений на размеры элементов механизма.
На третьем этапе определяются оптимальные допуски на размеры элементов механизма. Так как граница глобальной области существования допусков нелинейная и многосвязана, то одним из условий выбора оптимальных полей допусков является требование о возможности заключения их в гиперквадрат с таким расчетом, чтобы они не выходили за пределы глобального пространства.
Численные примеры
Расчет допусков по матричному и оптимизационному методу рассмотрим на примере позиционирования шарнирного четырехзвенника (рис. 3, а) и кривошипно-ползунного механизма (рис.3, б).
Для шарнирного черехзвенника за ошибку положения ![]() принимается разность угловых смещений коромысла 3
принимается разность угловых смещений коромысла 3 ![]() , а для кривошипно-ползунного механизма разность линейных перемещений ползуна 3 –
, а для кривошипно-ползунного механизма разность линейных перемещений ползуна 3 – ![]() .
.
Позиционирование механизмов осуществляется в дискретных положениях на интервале вращения кривошипа от 0° до 360° в каждых 10°.
Для наглядности представления результатов расчеты проводятся в поле двух параметров. Первый этап расчета начинается из состояния, когда оба параметра принимают значения (0;0).

Рис. 3 Параметры шарнирного четырехзвенника (а) и кривошипно-ползунного механизма (б) принятые в расчете
Пример 1.
Позиционирование шарнирного четырехзвенника по 4 равным отнулевым отклонениям.
Определяются допуски на кривошип 1 – ![]() и шатун 2 –
и шатун 2 – ![]() . В положениях 0°, 90°, 180° и 270° верхнее значение области допустимых значений функции ошибки
. В положениях 0°, 90°, 180° и 270° верхнее значение области допустимых значений функции ошибки ![]() , а нижнее
, а нижнее ![]() . Во всех других положениях ошибка положения механизма может принимать произвольные положения (рис. 4, а).
. Во всех других положениях ошибка положения механизма может принимать произвольные положения (рис. 4, а).
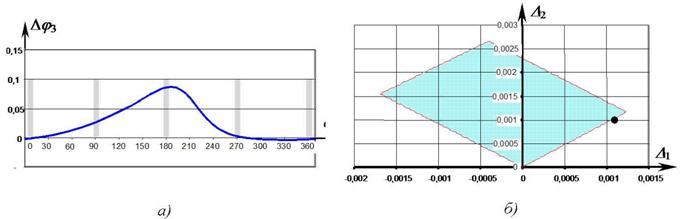
Рис. 4 Положения позиционирования шарнирного четырехзвенника (а) и поле допустимых значений допусков на кривошип ![]() и шатун
и шатун ![]() (б)
(б)
В результате выполнения первого этапа определено, что решение для данной задачи существует, и обход области искомых параметров начинается из точки с координатами ![]() ;
; ![]() . Найденная область существования допусков на кривошип и шатун показана на рис. 4, б.
. Найденная область существования допусков на кривошип и шатун показана на рис. 4, б.
Точкой отмечено решение, которое было получено по матричному методу, а на рис. 4, а показан вид функции ошибки механизма соответствующей этому решению. Видно, что значения допустимых отклонений находятся на границе найденной области существования допусков.
На следующем, третьем этапе решения задачи на основе найденного глобального пространства допусков определяются оптимальные поля допусков на искомые размеры элементов механизма. В поле двух параметров эти области имеют вид прямоугольников. На рис. 5 показаны три возможные области оптимальных допусков, соответствующие различным целевым функциям. Например, если стоимость эксцентрика, как одной из самой дорогостоящей детали механизма, зависит от точности его обработки, т.е. от допуска на размер кривошипа ![]() , то целесообразно задачу поиска оптимальных полей допусков свести к максимизации целевой функции
, то целесообразно задачу поиска оптимальных полей допусков свести к максимизации целевой функции ![]() (рис. 5).
(рис. 5).
Если же необходимо выбрать величины полей допусков пропорционально размерам элементов механизма, то для искомых допусков на кривошип и шатун целевую функцию можно представить в виде ![]() , где k – весовой коэффициент, учитывающий соотношение длин первого и второго звена. Одно из решений, соответствующее этой целевой функции показано на рис. 5 (поле
, где k – весовой коэффициент, учитывающий соотношение длин первого и второго звена. Одно из решений, соответствующее этой целевой функции показано на рис. 5 (поле ![]() ).
).
В том случае если требуется выбрать максимальные поля допусков на искомые размеры, то целевую функцию можно представить в виде ![]() (рис. 5),
(рис. 5),

Рис. 5 Рассчитанные поля допусков на кривошип и шатун, соответствующие трем различным целевым функциям
Пример 2.
Позиционирование кривошипно-ползунного механизма по 4 равным отнулевым отклонениям.
Как и в предыдущей задаче, определяются допуски на кривошип 1 – ![]() и шатун 2 –
и шатун 2 – ![]() . В положениях 0°, 90°, 180° и 270° верхнее значение области допустимых значений функции ошибки
. В положениях 0°, 90°, 180° и 270° верхнее значение области допустимых значений функции ошибки ![]() , а нижнее
, а нижнее ![]() (рис. 6, а). Во всех других положениях ошибка положения механизма может принимать произвольные положения.
(рис. 6, а). Во всех других положениях ошибка положения механизма может принимать произвольные положения.
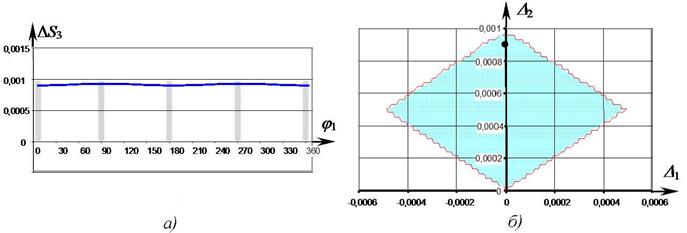
Рис. 6 Положения позиционирования кривошипно-ползунного механизма (а) и поле допустимых значений допусков ![]() и
и ![]() (б)
(б)
Определено, что решение для данной задачи существует, и обход области искомых параметров начинается из точки с координатами ![]() ;
; ![]() . Область существования допусков на кривошип и шатун показана на рис. 6, б.
. Область существования допусков на кривошип и шатун показана на рис. 6, б.
Точкой на рис. 6, б отмечено решение, которое получено по матричному методу, а на рис. 6, а показан вид функции ошибки механизма соответствующей этому решению. В отличие от предыдущего примера значения отклонений находятся в пределах найденного глобального пространства допусков.
Процедура выбора оптимальных полей допусков аналогична третьей стадии решения задачи, описанной в примере 1.
Пример 3.
Позиционирование кривошипно-ползунного механизма по отклонениям, при которых задача не имеет решения.
Определяются допуски на кривошип 1 – ![]() и шатун 2 –
и шатун 2 – ![]() . Поле допустимых положений функции ошибки показано на рис. 7. В положениях механизма от 0° до 180° верхнее значение области допустимых значений функции ошибки
. Поле допустимых положений функции ошибки показано на рис. 7. В положениях механизма от 0° до 180° верхнее значение области допустимых значений функции ошибки ![]() , а нижнее
, а нижнее ![]() . В положениях от 190° до 350° верхнее значение области допустимых значений функции ошибки
. В положениях от 190° до 350° верхнее значение области допустимых значений функции ошибки ![]() , а нижнее
, а нижнее ![]() .
.
На первом этапе оптимизационной задачи определено, что решения задачи для заданных условий позиционирования механизма не существует, т.е. ни при каких значениях ![]() и
и ![]() функция ошибки не попадет в заданные пределы в положениях позиционирования.
функция ошибки не попадет в заданные пределы в положениях позиционирования.
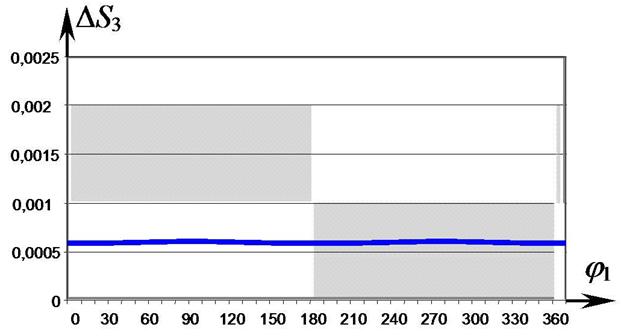
Рис. 7 Позиционирование кривошипно-ползунного механизма, при котором задача не имеет решений
Пример 4.
Позиционирование шарнирного четырехзвенника по 36 равным неотнулевым отклонениям.
Определяются допуски на шатун 2 – ![]() и коромысло 3 –
и коромысло 3 – ![]() . Поле допустимых положений функции ошибки механизма показано на рис. 8, а. Во всех положениях позиционирования (в каждых 10°) верхнее значение области допустимых значений функции ошибки
. Поле допустимых положений функции ошибки механизма показано на рис. 8, а. Во всех положениях позиционирования (в каждых 10°) верхнее значение области допустимых значений функции ошибки ![]() , а нижнее
, а нижнее ![]() .
.
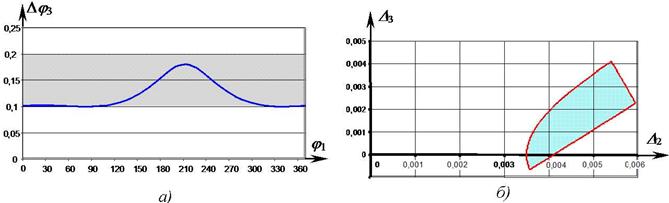
Рис. 8 Положения позиционирования шарнирного четырехзвенника (а) и поле допустимых значений допусков ![]() и
и ![]() (б)
(б)
Решение для данной задачи существует, и обход области искомых параметров начинается из точки с координатами ![]() ;
; ![]() . Найденная область существования допусков на шатун и коромысло показана на рис. 8, б.
. Найденная область существования допусков на шатун и коромысло показана на рис. 8, б.
Следует особо отметить, что, так как задано неотнулевое поле допустимых положений функции ошибки механизма, то для такой задачи нельзя получить решение при расчете допусков по матричному методу.
Заключение
Описанный в работе оптимизационный метод решения прямой задачи точности позволяет определять непосредственно допуски на размеры элементов плоских рычажных механизмов. Особенность предлагаемого метода заключается в возможности задания произвольной области допустимых положений функции ошибки механизма. При этом на начальной стадии анализа, основанной на методах нелинейного программирования, выявляются задачи, не имеющие решения. Метод позволяет определять пространство искомых допусков, в котором функция ошибки всегда находится в заданных пределах в положениях позиционирования механизма.
Авторами выполнены расчеты точности многозвенных рычажных механизмов по предложенному, оптимизационному методу. Результаты расчета подтверждают сделанный ранее вывод о том, что для механизмов с одинаковыми функциональными возможностями и при одинаковых условиях позиционирования допуски на элементы механизмов высоких классов могут назначаться более свободными, чем на элементы механизмов простой структуры.
Литература
1. Golovin, A., Linkages precision synthesis, In: Proc. of the 9–th world Congress on the theory of machines and mechanisms, Milan, Italy, Vol.2, 1509–1512, 1995.
2. Golovin, A., Ivanov, A., Determination of permissible length deviations in the links of crank press actuators according to tool positioning, J. of K.Sh.P., 11: 21–26, 1995 (in Russian).
3. Golovin, A., Bokov, A., Ivanov A., Some problems in precision synthesis of drawing press mechanisms, J. of K.Sh.P., 5: 22–28, 1997 (in Russian).
4. Golovin, A., Ivanov, A., Precision synthesis of link lengths and kinematic pair dimensions for complex linkages, In: Proc. of the 10–th world Congress on the theory of machines and mechanisms, Oulu, Finland, 1999.
5. Bunday B.D. Basic nonlinear programming, Radio & Sviaz, Moscow, 1989 (in Russian).
6. Mulkay E.L., Rao S.S. Fuzzy Heuristic for Sequential Linear Programming, In: Proc. of DETC'97, Sacremento, California, 1-12, 1997.
7. Каган Б.М. Решение цифровых задач на компьютере, Энергия, М.: 1971.
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||