научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 11, ноябрь 2011
УДК 621.37/.39
НИИ РЭТ
1. Введение.
Ступенчатое изменение частоты предполагает изменение несущей частоты каждого последующего импульса с определенным шагом Δf. Пачка состоит из Nимпульсов (рис. 1) длительностью τимп и периодом повторения T, частота изменяется в соответствии с формулой (1):
![]() , (1)
, (1)
где f0 – начальная частота, n = 0 ,2…N-1. Общая полоса, занимаемая сигналом в целом, определяется согласно выражению (2):
![]() . (2)
. (2)
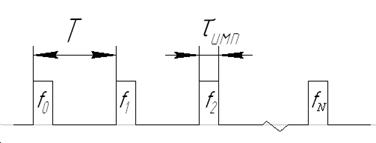
Рис. 1. Сигнал со ступенчатым изменением частоты.
2. Формирование и обработка сигнала с СИЧ.
Существует два вида радаров со ступенчатым изменением частоты: первый использует непрерывный сигнал, второй – пачку импульсов. Блок-схема представлена на рис. 2, она одинакова для обоих типов радиолокационных станций. В соответствии с управляющим напряжением, поступающим на ГУН, вырабатывается несущая определенной частоты, которая далее модулируется импульсом из последовательности и излучается. На приемной стороне работает синхронный детектор, который разбивает сигнал на квадратуры, и дальнейшая обработка ведется раздельно.

Рис. 2. Функциональная схема радиолокатора с СИЧ.
На детектор поступает опорный сигнал, который представляет собой непрерывный сигнал, изменяющийся по частоте через период повторения зондирующих импульсов в пачке (рис. 3). Взвешивающие окна соответствуют по ширине элементу разрешения по дальности, то есть длительности импульса. После обратного преобразования взвешенного сигнала результаты накапливаются, а решение принимается согласно мажоритарному сравнению.

Рис. 3. Временные диаграммы.
Если последовательно изменять частоту внутри длинного импульса, то можно получать ступенчатую линейную частотную модуляцию. Иногда такой способ изменения частоты применяют для получения нелинейной частотной внутриимпульсной модуляции путем аппроксимации зависимости частоты от времени и соответствующего частотного шага [1].
3. Способ вычисления функции неопределенности.
Как известно, функция неопределенности есть квадрат модуля автокорреляционной функции модуляции сигнала |Ψ(τ,Ω)|2. Автокорреляционная функция модуляции в свою очередь определяется согласно выражению (3) из [2]:
![]() , (3)
, (3)
где S(t) - функция модуляции (комплексная огибающая) принятого сигнала;
τ,Ω – разность соответствующих параметров задержки и частоты принятого и опорного согласованных (в случае автокорреляционной функции) сигналов. Тогда весь алгоритм сводится к простой схеме, изображенной на рис. 4.

Рис. 4. Схема вычисления функции неопределенности.
Идея метода состоит в использовании быстрой свертки в частотной области посредством прямого и обратного преобразований Фурье. Данная схема реализации алгоритма значительно упрощает структуру программы моделирования и является универсальной, то есть с ее помощью можно строить функции неопределенности любого сигнала, достаточно лишь описать сигнал или задаться дискретными отсчетами в зависимости от реализации предложенного алгоритма. Блоки задержки и умножения на exp(jΩt) есть циклическое изменение соответствующих параметров τ и Ω.
Следует заметить, что алгоритм требует значительного вычислительного ресурса вследствие троекратного использования преобразования Фурье.
4. Разрешающая способность радара с СИЧ.
Для пачки импульсов одинаковой частоты разрешение по дальности ΔR обычно определяется длительностью импульса в пачке в соответствии с формулой (3):
![]() , (3)
, (3)
с – скорость света. Требуемая полоса приемника Bсвязана с длительностью импульса как:
![]() . (4)
. (4)
Чем шире полоса приемника, тем меньше длительность импульса в пачке и лучше разрешающая способность по дальности.
Рассмотрим теперь пачку импульсов со ступенчатым изменением частоты. Дальность обнаружения радаров с таким сигналом ограничена периодом повторения импульсов. Она может быть:
![]() . (5)
. (5)
Пусть цель находится на расстоянии Rот радара, тогда зондирующий s(fn, t) и отраженный от цели u(fn, t-τ) сигналы можно выразить следующим образом:
![]() , (6)
, (6)
![]() , (7)
, (7)
где τ=2R/c. Согласно функциональной схеме радиолокатора, эти сигналы перемножаются в смесителе и далее проходят через НЧ фильтр (рис. 2), тогда на выходе НЧ фильтра будет сигнал:
![]() . (8)
. (8)
Далее сигнал из частотной области переводится во временную посредством ОБПФ:
![]() . (9)
. (9)
Для упрощения положим Anи Bnравными 1, тогда выражение (9) можно преобразовать следующим образом:
![]() (10)
(10)
Если принять за ![]() , то огибающая сигнала на выходе блока ОБПФ будет иметь вид:
, то огибающая сигнала на выходе блока ОБПФ будет иметь вид:
![]() . (11)
. (11)
Она имеет максимум в точке x=0, то есть в точках соответствующих (l=0,1,2…):
![]() . (12)
. (12)
Поэтому разрешающая способность, согласно [3,4], будет оцениваться следующим образом:
![]() , (13)
, (13)
где F – синтезируемая полоса сигнала. Это означает, что ΔR зависит от ширины полосы приемника и улучшается с увеличением количества импульсов в пачке.
Сигналы со ступенчатым изменением частоты используются в основном благодаря возможности создания синтезированного профиля, то есть обработке отдельных узкополосных импульсов, частота которых пошагово изменяется, и последующего их совместного синтеза.
Таким образом, РСА системы, использующие пачку импульсов со ступенчатым изменением частоты, могут регулировать разрешающую способность путем изменения количества импульсов в пачке N и частотного шага Δf.
Цели, находящиеся на расстоянии, превышающем ΔR друг от друга, будут иметь свою собственную фазу, зависящую от частоты, то есть сигнала на выходе ФНЧ.
5. Результаты моделирования.
Моделирование проводилось с целью оценки разрешающей способности радаров подповерхностного зондирования, использующих рассмотренный тип сигналов. Для подобных систем немаловажным параметром является начальная частота, которая должна находиться в ОВЧ диапазоне, наиболее подходящем для этих целей вследствие хорошей проникающей способности через лесной покров и малому уровню влияния отраженного от поверхности интерференционного сигнала, поэтому для моделирования был выбран сигнал со следующими параметрами:
Таблица 1. Параметры сигнала.
Начальная частота, f0 | 30 МГц |
Шаг изменения частоты, Δf | 1 МГц |
Длительность импульса | 1 мкс |
Период повторения | 5 мкс |
Количество импульсов в пачке | 10 |
На рисунках 5а и 5б показаны соответственно вид излучаемого сигнала и изменение частоты генератора во времени согласно управляющему напряжению.


а б
Рис. 5. Моделируемый сигнал: а – пачка из 10 импульсов, б – изменение частоты со временем.
Далее на рис. 6, 7, 8 и 9 представлены тела неопределенности и их сечения моделируемого сигнала, и пачки из 10 импульсов одной несущей частоты. Для их построения использовалась техника, описанная в п. 3.

Рис. 6. Тело неопределенности моделируемого сигнала.

Рис. 7. Сечение тела неопределенности моделируемого сигнала.
Рис. 8. Сечение тела неопределенности пачки импульсов одной несущей частоты.

Рис. 9. Тело неопределенности пачки импульсов одной несущей частоты.
Отметим, что по сравнению с пачкой импульсов, модулированной одной частотой (рис. 8 и 9), функция неопределенности рассматриваемого сигнала имеет боковые лепестки меньшего уровня, следовательно, пачка таких импульсов лучше развязывается по дальности, и устраняется неоднозначность.
Разрешающая способность этого сигнала, согласно формуле (13), равна 15м, причем максимальная дальность обнаружения составляет 600м. Можно ее улучшить, увеличив шаг изменения частоты и количество импульсов в пачке. Так, например, в целях обнаружения целей под лесным покровом необходимо использовать полосу ОВЧ диапазона: 20-84 МГц, так как на этих частотах отраженные сигналы меньше всего ослабляются вследствие переотражения и затухания, тогда разрешающая способность такой системы составит 2.4 м, что позволит обнаруживать малогабаритные цели.
Рассмотрим теперь возможность создания синтезированного профиля для получения объективного вывода о целесообразности применения данного метода. В качестве примера взяты следующие параметры радиолокационной системы: центральная частота 30 МГц, шаг изменения частоты 30 кГц, количество импульсов в пачке 64. Обрабатывается сигнал от одиночной цели, находящейся на расстоянии 1.5 км. На рис. 10 изображена огибающая сигнала на выходе блока ОДПФ, на рис. 11 – та же огибающая, но в зондирующей пачке было лишь 32 импульса. И в том и в другом случае дальность до цели определена с достаточно малым отклонением и чем больше зондирующих импульсов и шаг изменения частоты, тем меньше это отклонение. С увеличением количества целей, алгоритм не усложняется – для каждого отдельно пришедшего отклика вычисляется его амплитудная огибающая на выходе блока ОДПФ, а затем полученные данные объединяются, в результате на выходе устройства обработки находится информация об общей целевой обстановке. Так, на рис. 12 представлена общая картина о трех целях, находящихся на дальностях 500 м, 1.5 км и 3.5 км соответственно.

Рис. 10. Отсчеты огибающей сигнала на выходе блока ОДПФ, 64 импульса.
Рис. 11. Отсчеты огибающей сигнала на выходе блока ОДПФ, 32 импульса.
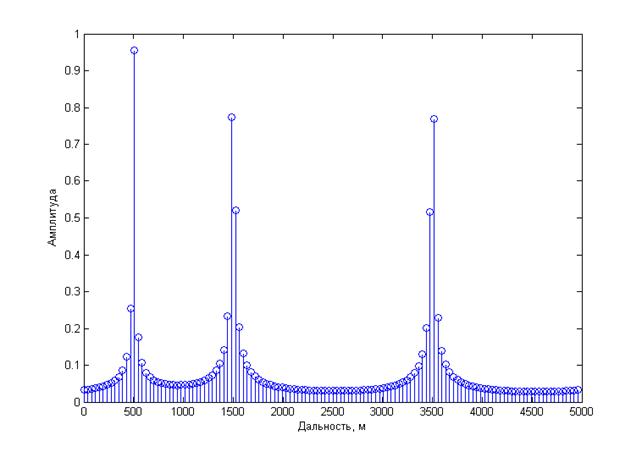
Рис. 12. Объединенные данные обработки сигналов, отраженных от трех целей.
Таким образом, общий радиолокационный многоцелевой портрет получается путем объединения результатов обработки по каждому отклику. Качественно способность разрешить две близко находящиеся цели можно по формуле (13).
6. Выводы.
В результате исследования был предложен и реализован универсальный математический алгоритм для построения тел неопределенности различных по виду сигналов. В частности был подробно изучен сигнал со ступенчатым изменением частоты, который обладает рядом особенностей, при его формировании и обработке. Важнейшей из них является изменяемая разрешающая способность и возможность построения синтезированного профиля.
Разрешающая способность радиолокационной системы с СИЧ может изменяться с помощью увеличения или уменьшения полосы сигнала, которая определяется количеством импульсов в пачке и шагом изменения частоты. Поэтому необходимо задаться используемой полосой частот и в соответствии с этим строить сигнал. Очевидно, что можно построить гибкую с точки зрения подстройки разрешающей способности радиолокационную систему на основе сигнала со ступенчатым изменением частоты.
В качестве дальнейшего направления исследований можно отметить учет доплеровского сдвига частоты отраженного от подвижной цели зондирующего сигнала, способы создания двумерных радиолокационных изображений.
7. Литература.
1. Doerry A.W. Generating Nonlinear FM Chirp Waveforms for Radar. // Sandia report, Albuquerque, New Mexico, USA, 2006. P. 1-34.
2. Слока В. К. Вопросы обработки радиолокационных сигналов. М., «Советское радио», 1970. 256 стр.
3. Fukushima C., Hamada N. A study on Stepped Frequency Radar by Using Intra-Pulse Phase Coded Modulation. // Proc. Of the WCECS 2008, San Francisco, USA, 2008.
4. Wang B.C. Digital Signal Processing Techniques and Applications in Radar Image Processing. Pub. by John Wiley & Sons Inc., New Jersey, USA, 2008. P. 368.
5. Fransson J.E. Walter F., Blennow K., Gustavsson A., Ulander L.M. Detection of storm-damaged forested areas using airborne CARABAS-II VHF SAR Image data. IEEE transactions on geoscience and remote sensing, VOL. 40, NO. 10, 2008.
Публикации с ключевыми словами: моделирование сигналов, функция неопределенности, тело неопределенности
Публикации со словами: моделирование сигналов, функция неопределенности, тело неопределенности
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||