научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 10, октябрь 2011
УДК 629.11.012.8
МГТУ им. Н.Э. Баумана
Введение
Транспортная гусеничная машина (ГМ) является сложной механической системой. Для выяснения динамики взаимодействия ГМ и местности на этапе проектирования требуется сложная математическая модель системы машина-местность. В настоящее время существует ряд математических моделей, с большой степенью достоверностью описывающее прямолинейное движение ГМ по грунтам различного профиля [1, 2].
Увеличение быстродействия ЭВМ позволило усложнить математические модели движения ГМ: более достоверно учесть влияние гусеничного обвода; перейти, в отличие от ранних моделей, к рассмотрению большего количества конструкционных особенностей элементов системы подрессоривания.
Считается, что с достаточной для практики точностью гусеницу следует считать растяжимой лентой с “нелинейной зависимостью между растягивающим усилием и удлинением”[3].
Однако часто для исследования движения ГМ необходима более подробная модель гусеничного обвода, которая не только учитывает воздействие усилий гусеницы на ходовую часть, но и реализацию этих усилий на грунт. Такая модель должна в той или иной степени имитировать все основные системы ГМ (силовую установку, трансмиссию, подвеску, движитель), что увеличит требования математической модели к вычислительным ресурсам.
Поэтому, важной задачей является снижение сложности такой ресурсоёмкой части математической модели ГМ как гусеничный обвод.
1. Обзор существующих моделей гусеничного обвода
В [4] предложена двухшаговая схема реализации модели гусеничного обвода. В этой модели гусеницы рассматриваются как последовательно связанные между собой невесомые, растяжимые ленты. Каждая гусеница состоит из последовательно связанных между собой участков, в пределах которых растягивающее усилие неизменно. На соседних участках усилия могут быть различными. Границы участков – это места, где возможно возникновение продольных реакций связей, наложенных на обвод. А именно, места зацепления ведущих колёс и площадки контакта опорных катков с опорным основанием, которые предполагают точечными.
Основной смысл реализации модели состоит в разделении перемещения гусеницы на два этапа. На первом этапе считается, что поворот ведущего колеса деформирует ленты гусеницы. На втором этапе рассчитывается перемещение системы. Ведущие колёса при этом считаются неподвижными. Построение такой модели, например, средствами Matlab/Simulink будет достаточно трудоёмким из-за того, что модель гусеницы потребует два шага расчёта, приходящихся на один шаг расчёта остальной модели.
В [5] предлагается рассматривать гусеничный обвод как набор отдельных масс – траков, соединённых одномерными упруго-демпфирующими силами. В упомянутом труде подвеска и моторно-трансмиссионная установка ГМ не моделируется. Вместо этого задаются перемещения соответствующих траков по гармоническому закону. Учитывая большое количество траков в гусенице современной ГМ (97 траков в каждой гусенице танка Т-90), расчёт уравнений динамики такого же количества масс может быть неоправданно.
Для работ, в которых моделирование гусеничного обвода является неосновной, сопутствующей задачей, полезна модель гусеничного обвода, имеющую более простое математическое описание и меньшие требование к вычислительным ресурсам.
2. Новая модель гусеничного обвода.
Идеи описанных выше математических моделей были взяты за основу для создания новой модели гусеничного обвода.
А именно, гусеничная лента представляется в виде нескольких сосредоточенных в материальных точках масс mi с одной степенью свободы, соединённых упруго-демпфирующими связями, как это сделано в работе [5]. Однако предлагается заменять массой не каждый трак, а только те точки гусеницы, в которых возможно возникновение продольных сил (рис. 1), то есть, уже упомянутые места зацепления ведущих колёс и точки контакта опорных катков с опорным основанием.
При этом следует помнить, что такое разделение на массы достаточно условно и результаты расчётов сильно не изменятся, если считать все Nm масс равными друг другу, а их сумму равной общей массе гусеницы Mгус:
![]()
![]()

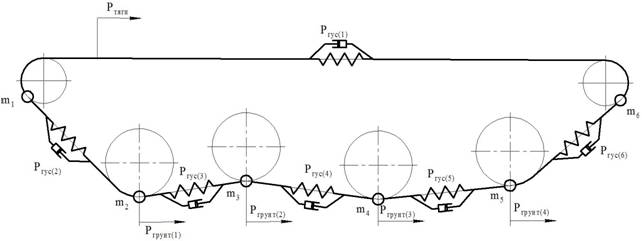
Рис. 1. Модель гусеничного обвода
Для определённости предлагается ввести следующую нумерацию. Опорные катки по борту, числом NOK, считать слева (от ведущего колеса) направо. Массы номеровать, начиная с той, к которой приложена сила тяги, против часовой стрелки. Положительным направлением движения масс считать движение по часовой стрелке, т.к. это совпадает с передних ходом машины при выбранной схеме (рис. 1).
На каждую массу mi действуют упругие и демпфирующие силы соседних участков гусеницы:
![]()
![]()
На массу на ведущем колесе кроме того действует сила тяги двигателя Pтяги. Массы под опорными катками так же испытывают дополнительные воздействия от горизонтальной реакции грунта Pгрунт(n). По большому счёту, для масс под ведущим и направляющим колёсами эта реакция тоже возможна в случае их касания грунта, однако в данной работе этот случай не рассматривается.
С учётом всего вышесказанного, уравнения динамики гусеничного обвода примут вид
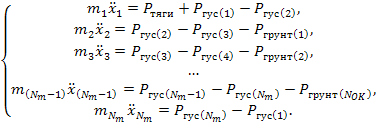
Здесь и далее xi – перемещение соответствующей массы mi. Первая и вторая производная по времени – скорость и ускорение.
Сила тяги Pтяги зависит от характеристик силовой установки и для предлагаемой модели является, по сути, задаваемым параметром. Однако для полноценной реализации системы двигатель-машина необходимо иметь обратную связь с функцией силы тяги по скорости первой массы. В большинстве случаев сила тяги будет зависеть ещё и от текущего положения гусеницы
![]()
Упругие и демпфирующие силы в гусенице могут быть вычислены по удлинениям и разницам скоростей соответствующих ветвей гусеницы
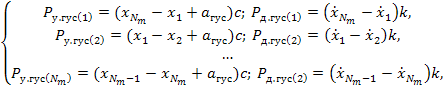
или
![]() .
.
Здесь Δli– удлинение i-го участка гусеницы, ΔVi– скорость удлинения i-го участка гусеницы, с – коэффициент жёсткости гусеницы, k – коэффициент демпфирования гусеницы, aгус – удлинение каждой ветви гусеницы от сил предварительного натяжения.
Удлинение гусеницы aгус предлагается задавать таким образом, чтобы статическое натяжение гусеницы составляло 0,1 веса ГМ. Это примерно соответствует предварительному натяжению гусеницы современных ГМ с резинометаллическими шарнирами [1].
При составлении модели следует учесть, что гусеница не должна работать на сжатие, а только на растяжение, т.е
![]()
Упругодемпфирующие силы в гусенице будут воздействовать на подвеску, пытаясь поджать катки. Очевидно, что тут не обойтись без моделирования системы подрессоривания.
Можно воспользоваться готовой моделью подвески, описанной в [1]. Эта модель, по сути, является одномерной, то есть элемент подвески воспринимает только вертикальные усилия. Подвеска представляется в виде свечной (ход опорных катков считается вертикальным), однако упругие и демпфирующие характеристики могут быть рассчитаны через передаточную функцию балансира (приведены к катку), что имитирует балансирную подвеску [1].
Из модели подвески можно выяснить взаимное положение опорных катков, а также направляющего и ведущего колеса. Для вычисления вертикальных составляющих Pгус.z достаточно знать углы направлений на следующий элемент ходовой части αi (рис. 2).
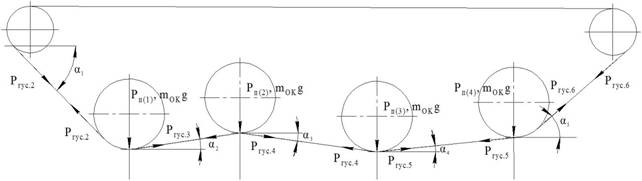
Рис. 2. Влияние гусеничного обвода на подвеску
Для каждого опорного катка массой mOK можно записать следующие уравнения динамики
![]()
где Pп(i) – сила воздействующая на опорный каток со стороны подвески.
Понятно, что это уравнение не учитывает все случаи поведения гусеничного обвода. Например, если горизонтальные составляющие сил натяжения гусеницы Pгус.z будут отрицательны, то они «потянут» опорный каток вниз. Это соответствует случаю, когда гусеница не охватывает каток и сила со стороны гусеницы на него действовать не должна. В рамках предложенной модели принято воздействие сил Pгус.z на опорный каток нулевым при их отрицательном значении.
Для упрощения модели воздействие сил Pгус.z на корпус через подвеску можно компенсировать, приложив к корпусу противоположные по направлению, но равные по модулю силы (-Pгус.z). В действительности эти силы компенсируются действием гусеничного обвода на ведущее и направляющее колесо.
Очевидно, что именно горизонтальные реакции грунта Pгрунт(i) являются движущей силой, толкающей корпус ГМ в направлении движения. Их необходимо приложить в координатах касания опорным катком грунта (рис. 3). Можно видеть, что они будут вызывать отклонение корпуса машины φ на корму, что соответствует поведению реальной машины.
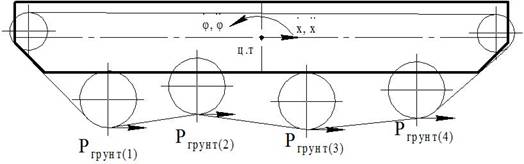
Рис.3. К определению реакций грунта, движущих корпус
Максимально возможные реакции грунта Pгрунт(i) можно определить, зная коэффициент сцепления φгр, зависящий от типа грунта, и нормальную реакцию грунта под катками [3]. Она равна силе в шине опорного катка Pш, известной из модели подвески. Тогда
![]()
В предлагаемой модели сила реакции грунта Pгрунт(i) является силой трения и участки, где максимальная сила реакций не реализуется, её следует считать линейно зависящей от скорости движения каждой массы гусеницы mi относительно грунта Vгус(i) (скорости буксования). Качественный вид характеристики сцепления изображён на рис. 4.
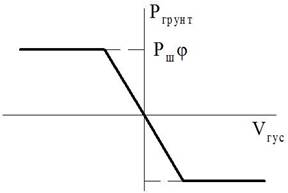
Рис. 4. Простейшая характеристика сцепления гусеницы с грунтом
Геометрия грунта под опорным катком задаётся вертикальной координатой грунта zгрунт. Очевидно, что если профиль грунта представляет собой кривую, то площадка под опорным катком может иметь некоторый наклон. Вычислив угол этого наклона (например, с помощью значения zгрунт на предыдущем шаге расчёта), можно разложить силу в шине на горизонтальную и вертикальную составляющую. Вертикальные составляющие используются для расчёта сил в подвеске. Силы сцепления с грунтом Pгрунт(i) и горизонтальные составляющие определяют динамику прямолинейного движения ГМ.
3. Вычислительный эксперимент
Результаты работы предлагаемой модели гусеничного обвода, выполненного в программном пакете Matlab/Simulink, показан на рис.5.
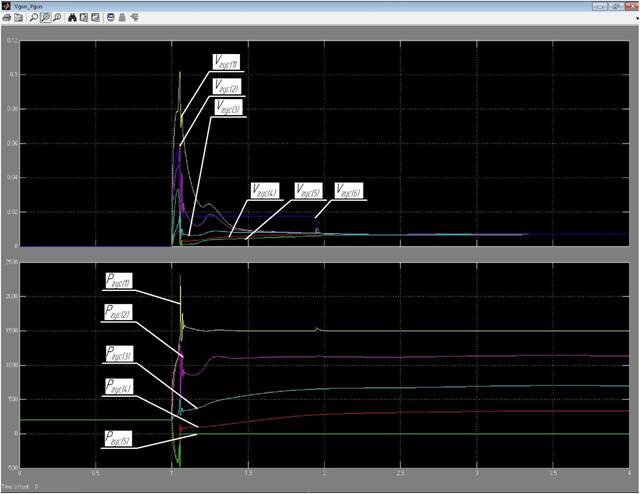
Рис. 5. Скорости буксования и силы в модели гусеницы
Верхний график показывает зависимость скорости буксования каждой массы гусеницы от времени. Нижний график – изменение упругодемпфирующих сил, связывающих массы гусеницы, во времени. Можно видеть, что в момент нахождения системы в покое (время симуляции до 1 секунды) на массы действует только сила предварительного натяжения, одинаковая во всех ветвях гусеницы (нижний график). В момент трогания машины с места (1-я секунда симуляции) силы тяги начнут перемещать первую массу гусеницы (график жёлтого цвета), связанную с ведущим колесом. На верхнем графике видно, что за этой массой с некоторым отставанием следуют остальные.
Для этой же модели на рис.6 показаны горизонтальное перемещение центра тяжести машины x (сиреневый график) и продольный наклон корпуса φ (жёлтый график). Положительное направление наклона корпуса в модели – на корму.
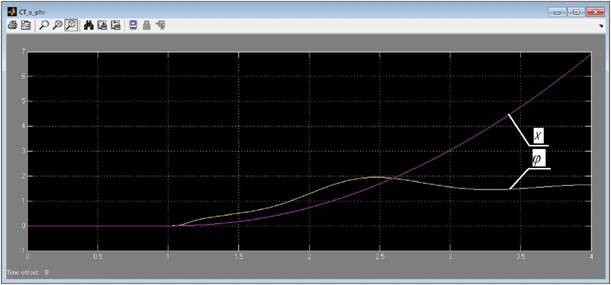
Рис. 6. Горизонтальное перемещение центра тяжести и наклон корпуса ГМ.
Расчёт четырёх секунд моделирования гусеничного обвода (в составе модели ГМ) занял около трёх секунд даже на устаревшем персональном компьютере.
Заключение.
Разработанная модель гусеничного обвода имеет скорость расчёта, сопоставимую с реальным временем. Взаимодействие моделируемого гусеничного обвода машины с простейшей моделью грунта качественно соответствует их поведению в реальных условиях. Модель позволяет проводить расчёт ГМ с любым количеством опорных катков на борт.
Предложенная модель гусеничного обвода может быть приспособлена для трёхмерной модели ГМ, что позволит исследовать не только прямолинейное движение ГМ, но и её поворот. Практическая значимость модели может быть повышена, если усложнить расчёт взаимодействия гусеницы и грунта - учесть влияние большего количества характеристик грунта и грунтозацепов гусеницы. С помощью введения дополнительных масс гусеницы можно рассмотреть поведение участков гусеничного обвода между опорными катками в интересах задачи профильной проходимости.
Библиографический список
1. Дядченко М.Г., Котиев Г.О., Наумов В.Н. Конструкция и расчёт подвесок быстроходных гусеничных машин: учеб.пособие. – М.: Изд-во МГТУ им. Н.Э.Баумана, 2007. – 40 с.
2. Котиев Г.О., Сарач Е.Б. Комплексное подрессоривание высокоподвижных двухзвенных гусеничных машин. – М.: Изд-во МГТУ им.Н.Э.Баумана, 2010. – 184с.
3. Аврамов В.П., Калейчев Н.Б. Динамика гусеничной машины при установившемся движении по неровностям. – Харьков: Вища школа, 1989. – 112 с.
4. Котиев Г.О. Прогнозирование эксплутационных свойств систем подрессоривания военных гусеничных машин: Диссертация на соискание ученой степени доктора технических наук. – М.: МВТУ, 2000. – 265 с.
5. Платонов В.Ф. Динамика и надёжность гусеничного движителя, М., «Машиностроения», 1973. - 293 с.
Публикации с ключевыми словами: моделирование, подвеска, гусеничная машина, гусеничный движитель
Публикации со словами: моделирование, подвеска, гусеничная машина, гусеничный движитель
Смотри также:
- 77-30569/216198 Особенности моделирования электрической трансмиссии транспортного средства на примере линейного тягового электрического привода
- Анализ возможности применения существующих математических моделей движения гусеничной машины по неровностям местности для исследования динамических процессов в гусеничном обводе
- Моделирование глушителей шума в программной среде COMSOL Multiphysics
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||