научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 10, октябрь 2011
УДК 004.891.2
МГТУ им. Н.Э. Баумана
Для повышения эффективности систем поражения целей на заатмосферном участке их траекторий и рационального использования боекомплекта контур управления должен иметь обратную связь, позволяющую на основании оценки факта воздействия на цель строить (корректировать) дальнейший план поражения целей. Очевидно, что для решения этой задачи необходимо с высокой достоверностью оценивать факт поражения (ОФП) цели.
Принципиальная возможность и качество решения задачи ОФП зависят от ряда особенностей, связанных со спецификой процессов и явлений, лежащих в её основе.
1. Существуют трудности определения множества признаков, соответствующих факту поражения цели. Фактически до реальных боевых действий возможности получения таких данных о целях будут ограничены.
2. Возможно противодействие противника. Даже при достаточно полно заданном множестве признаков поражения цели предстоит еще определить общий подход и найти алгоритм, который бы, достоверно указывал бы на факт поражения объектов.
3. Получить решение задачи ОФП цели с использованием пороговых решающих функций существующих алгоритмов распознавания довольно сложно. Хотя этот подход является алгоритмически просто реализуемым, он применим лишь для статистически стабильных условий и наличия устойчивого признакового пространства.
4. Состав группировки информационных средств системы информационного обеспечения имеет ограниченное число специализированных средств, способных эффективно решать задачу получения качественной некоординатной информации.
5. Пространственное построение группировки информационных средств системы информационного обеспечения не во всех случаях обеспечивает наблюдение собственно самого процесса перехвата. Кроме того, разрешающая способность этих средств не позволяет наблюдать сам перехват.
Если принять гипотезу, что столкновение перехватчика определённой массы с целью в заданном диапазоне скоростей сближения гарантированно приводит к её поражению, задача ОФП сводится к оценке факта попадания перехватчика в габариты цели. Признаками попадания в габариты цели (противодействие путём имитации последствий перехвата в данной статье не рассматривается) в этом случае могут выступать как прямые следствия: фрагментация цели, изменение параметров траектории, нарушение стабилизации и ориентации цели, так и косвенные, например изменение характера работы и радиообмена цели.
Очевидным признаком поражения цели является её фрагментация. Однако, не смотря на то что, вполне определённо можно сказать какие явления будут иметь место при соударении, сложно однозначно определить приведут ли они к фрагментации. Так можно с уверенностью считать, что при соударении возникнут различного рода деформации и разрывы, нагревание в зоне контакта материалов вплоть до плавления (соответствует скоростям соударения около нескольких км/с [4]) и возможно даже испарения (скорость соударения более десяти км/с [4]). Однако крайне сложно хотя бы приблизительно сказать, будут ли деформации настолько сильны, что приведут к фрагментации цели. Или, например, к чему может привести плавление и испарение материалов из зоны контакта и их дальнейшее взаимодействие с телом цели.
Поскольку непосредственно наблюдать процесс перехвата с требуемым разрешением по ряду причин не всегда представляется возможным, необходимо выделить признаки, которые позволили бы судить о факте попадания перехватчика в цель. Для этого рассмотрим систему перехватчик – цель и попытаемся хотя бы качественно определить её состояние после соударения.
Систему перехватчик – цель представим как систему из двух тел: «лёгкого» массы m и «тяжёлого» M соответственно. Масса цели больше массы перехватчика как минимум на один-два порядка, линейные размеры тел так же отличаются не менее чем на один-два порядка. Тела движутся по прямолинейным траекториям таким образом, что происходит их соударение. Необходимо определить состояние системы после соударения.
Соударение будем рассматривать в системе отсчёта (СО) (правой) связанной с центром масс (ЦМ) «тяжёлого» тела до удара. Примем допущение, что ЦМ системы совпадает с ЦМ «тяжёлого» тела, и выбранная СО инерциальная. Очевидно, что чем больше разница в массах тяжёлого и лёгкого тел, тем это допущение строже.
В процессе соударения выполняться законы сохранения энергии, импульса и момента импульса, в общем случае их можно записать как:
 , (1)
, (1)
где ![]() ,
, ![]() ,
, ![]() ,
, ![]() - масса, вектор скорости осколков «тяжёлого» и лёгкого тел соответственно;
- масса, вектор скорости осколков «тяжёлого» и лёгкого тел соответственно; ![]() ,
, ![]() ,
, ![]() ,
, ![]() - тензор инерции и угловые скорости вращения относительно осей принятой СО осколков «тяжёлого» и лёгкого тел соответственно;
- тензор инерции и угловые скорости вращения относительно осей принятой СО осколков «тяжёлого» и лёгкого тел соответственно; ![]() - энергия перешедшая в процессе соударения в тепло и затраченная на различного рода деформации и разрушения.
- энергия перешедшая в процессе соударения в тепло и затраченная на различного рода деформации и разрушения.
Очевидно, что этих уравнений не достаточно для определения состояния системы после соударения. Недостающие соотношения можно определить из условий соударения и свойств соударяющихся тел, что само по себе представляет отдельную сложную задачу. Сложность задачи многократно возрастает для случая высокоскоростного столкновения (скорости столкновения могут быть больше скорости звука в материалах цели и перехватчика) больших составных тел со сложной внутренней структурой. На данный момент хорошо исследованы и экспериментально отработаны случаи столкновения маленьких (порядка единиц грамма для скоростей в несколько км/с и десятые доли грамма для скоростей до десяти км/с) однородных, ударников с разнообразными пластинами [4]. Повышение скорости столкновения и одновременной массы ударника затруднено из-за энергетических ограничений и перегрузок, возникающих при разгоне. При моделировании процессов соударения с усложнением моделей соударяющихся тел нелинейно возрастает и сложность вычислений.
Доопределим систему (1) таким образом, чтобы она стала полной. Введём дополнительные условия. Во-первых, будем считать, что «лёгкое» тело пробивает тяжёлое насквозь, при этом направление вектора его скорости не меняется. Во-вторых, будем считать, что осколков после соударения не будет. Ограничимся только тем, что в процессе соударения масса «лёгкого» тела может измениться на величину ![]() за счёт «слипания» (масса «тяжёлого» тела меняется на ту же величину, но с другим знаком). В-третьих, будем считать, что в результате соударения приобретёт вращение только «тяжёлое» тело. Вращением «лёгкого» тела, учитывая разницу в массах и размерах, можно пренебречь. Соударяющиеся тела будем считать сплошными однородными шарами радиуса R и r(R>> r). Система (1) в этом случае существенно упрощается и принимает вид:
за счёт «слипания» (масса «тяжёлого» тела меняется на ту же величину, но с другим знаком). В-третьих, будем считать, что в результате соударения приобретёт вращение только «тяжёлое» тело. Вращением «лёгкого» тела, учитывая разницу в массах и размерах, можно пренебречь. Соударяющиеся тела будем считать сплошными однородными шарами радиуса R и r(R>> r). Система (1) в этом случае существенно упрощается и принимает вид:
 , (2)
, (2)
где ![]() - часть кинетической энергии «лёгкого» тела до соударения, которая перешла в поступательное и вращательное движение тел после соударения;
- часть кинетической энергии «лёгкого» тела до соударения, которая перешла в поступательное и вращательное движение тел после соударения; ![]() – модуль импульса «лёгкого» тела до соударения;
– модуль импульса «лёгкого» тела до соударения; ![]() – модуль момента импульса «лёгкого» тела относительно оси O1Z (см рис.1.).
– модуль момента импульса «лёгкого» тела относительно оси O1Z (см рис.1.).
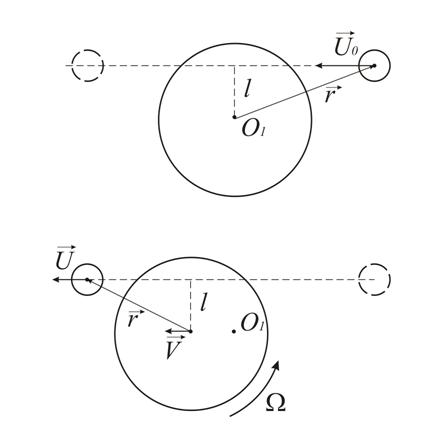
Рис. 1
Величины E, ![]() , Δm, l, R будем считать заданными. Решая систему (2) относительно неизвестных V, U, Ω получим квадратное уравнение:
, Δm, l, R будем считать заданными. Решая систему (2) относительно неизвестных V, U, Ω получим квадратное уравнение:
![]() , (3)
, (3)
где для сокращения записи введены следующие обозначения: ![]() ,
, ![]() ,
, ![]() . Решая его, получаем два корня:
. Решая его, получаем два корня:
 ,
,  .
.
Как не трудно видеть, при ![]() дискриминант уравнения (3) положителен. Корень уравнения
дискриминант уравнения (3) положителен. Корень уравнения ![]() в рассматриваемой ситуации посторонний, поскольку в предельном случае для абсолютно упругого центрального удара (
в рассматриваемой ситуации посторонний, поскольку в предельном случае для абсолютно упругого центрального удара (![]() ,
, ![]() ,
, ![]() ) он соответствует случаю отскока
) он соответствует случаю отскока ![]() ,
, ![]() [2]. В нашем же случае, учитывая предположения, введённые при доопределении системы (1), имеет место пролёт насквозь без взаимодействия
[2]. В нашем же случае, учитывая предположения, введённые при доопределении системы (1), имеет место пролёт насквозь без взаимодействия ![]() ,
, ![]() . Таким образом, решение системы (2) имеет вид:
. Таким образом, решение системы (2) имеет вид:
 ,
, ![]() ,
, ![]() . (4)
. (4)
График зависимости угловой скорости вращения цели от изменения массы перехватчика и потерь кинетической энергии на тепло изображен на рис.2.

Рис.2. График зависимости угловой скорости вращения цели от изменения массы перехватчика и величины потерь кинетической энергии на тепло (![]() км/с,
км/с, ![]() кг,
кг, ![]() кг,
кг, ![]() м).
м).
Расчеты по соотношениям (4) для типовых условий перехвата показывают следующее:
- цель получает незначительное приращение скорости в направлении вектора скорости перехватчика (до десятков метров в секунду);
- в результате соударения цель начинает вращаться, в зависимости от условий соударения, с угловой скоростью от единиц до сотни оборотов в секунду.
Изменение скорости цели, пусть и незначительное, приведёт к плавному дрейфу параметров траектории цели. В случае обеспечения расчета данных изменений с приемлемой точностью факт появления таких изменений может быть использован в качестве признака поражения цели. Очевидно, что дрейф параметров траектории перехваченной цели будет расти с течением времени и, в зависимости от требований по оперативности ОФП, использование данного признака будет возможно не всегда.
Исходя из законов сохранения, можно заключить, что независимо от условий соударения после взаимодействия перехватчик и цель (или их осколки) приобретают вращение. Важно отметить, что вращение после соударения будет в любом случае. Конечно, можно подобрать такие соотношения параметров E, ![]() , Δm, l, R, что в результате
, Δm, l, R, что в результате ![]() , однако, на практике появление таких точечных случаев маловероятно.
, однако, на практике появление таких точечных случаев маловероятно.
За счёт измерения флюктуаций ЭПР цели система информационного обеспечения имеет возможность довольно просто определять наличие вращения и измерять скорость вращения сопровождаемых объектов. Таким образом, появление вращения у цели после обстрела или скачкообразное изменение параметров её стабилизации, будет однозначно свидетельствовать о том, что произошло соударение. Т.е. мы получили достоверный и легко определяемый признак, по которому можно судить о факте попадания перехватчика в цель.
Литература
1. Ландау Л.Д., Лифшиц Е.М. Теоретическая физика Механика – М.:Наука, 1988
2. Сивухин Д.В. Общий курс физики Механика. – М.:Наука, 1989.
3. Корн Г, Корн Т. Справочник по математике для научных работников и инженеров. – М.:Наука, 1984.
4. Теоретические и экспериментальные исследования высокоскоростного взаимодействия тел. Под ред. А.В. Герасимова. – Томск: Издательство Томского университета, 2007.
Публикации с ключевыми словами: модель соударения, оценка факта поражения, фрагментация, флюктуация эффективной поверхности рассеивания
Публикации со словами: модель соударения, оценка факта поражения, фрагментация, флюктуация эффективной поверхности рассеивания
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||